Изобретение относится к способу контроля электромагнитного клапана, содержащего управляющую катушку для управления давлением воздуха в тормозном цилиндре электропневматического тормоза, устройство управления для осуществления способа и электропневматический тормоз с устройством управления.
Такой способ известен из публикации WO 2001/066 397 A1. В ней для контроля электромагнитного клапана измерительный сигнал снимают на стороне питающего напряжения электромагнитного клапана. При этом сторона питающего напряжения располагает имеющейся в электромагнитном клапане управляющей катушкой для управления давлением воздуха в тормозном цилиндре электропневматического тормоза, причем управляющая катушка отбирает электрический питающий ток на стороне питающего напряжения и выдает электрический питающий ток на стороне эталонного потенциала. Короткие замыкания управляющей катушки можно распознавать при снятии измерительного сигнала на стороне питающего напряжения электромагнитного клапана.
Задача изобретения состоит в усовершенствовании контроля электромагнитного клапана.
Задача решается с помощью признаков независимого пункта 1 формулы изобретения. Предпочтительные усовершенствованные варианты изобретения являются предметом зависимых пунктов формулы изобретения.
Согласно одному аспекту изобретения, способ контроля электромагнитного клапана с управляющей катушкой для управления давлением воздуха в тормозном цилиндре электропневматического тормоза, причем электромагнитный клапан имеет сторону питающего напряжения, на которой управляющая катушка отбирает электрический питающий ток, и сторону эталонного потенциала, на которой управляющая катушка отдает электрический питающий ток, содержит этапы: подачи или подвода контрольного сигнала на стороне электромагнитного клапана, снятия измерительного сигнала на другой стороне электромагнитного клапана и определения состояния электромагнитного клапана, исходя из сопоставления контрольного сигнала и измерительного сигнала.
В основе представляемого способа лежит идея, что в уже названном способе в управляющей катушке контролируют только прохождение в ней питающего тока в соответствии с рабочими характеристиками управляющей катушки. То есть, если электромагнитный клапан включен и вместе с тем управляющая катушка находится под током, то контрольный сигнал должен иметь соответствующее питающему напряжению значение, а если управляющая катушка не находится под током, то контрольный сигнал должен иметь соответствующее эталонному потенциалу, как правило, массе, значение. Однако, нельзя контролировать управляющую катушку в выключенном состоянии, так как эталонный потенциал не изменяется. С помощью уже указанного прежде способа также нельзя определять разрывы или другие ошибочные в техническом отношении значения полного сопротивления управляющей катушки, так как они не могут отличаться от правильной эксплуатации управляющей катушки.
Здесь представляется способ, в котором предлагается подавать контрольный сигнал на одной стороне электромагнитного клапана и проверять корректность его приема на другой стороне электромагнитного клапана. И только тогда, когда контрольный сигнал передается, как это задано, с одной стороны электромагнитного клапана на другую сторону электромагнитного клапана, можно судить об исправном состоянии его управляющей катушки, а вместе с ней и электромагнитного клапана. Это позволяет контролировать электромагнитный клапан не только на предмет множества неисправных состояний, но и удается осуществлять контроль тогда, когда управляющая катушка электромагнитного клапана не находится под током, а вследствие этого, в неактивном эксплуатационном режиме.
Контрольный сигнал можно выбирать любым, в частности, независимо от всех других сигналов в тормозной системе с электромагнитным клапаном. Тем не менее, предпочтительно, если контрольный сигнал зависит от управления давлением воздуха в тормозном цилиндре или даже служит командным сигналом для регулировки давления воздуха в тормозном цилиндре. Это позволяет реализовывать без последующих согласований способ в уже имеющемся электропневматическом тормозе, в котором имеются командные сигналы, подходящие в качестве контрольных сигналов, только при наблюдении и/или обработке сигналов.
В усовершенствованном варианте указанного способа, контрольный сигнал имеет заданную, изменяющуюся по времени продолжительность. Продолжительность по времени является следующим средством контроля управляющей катушки, так как она находится в контрольном сигнале.
При этом продолжительность по времени может быть образована множеством импульсов. Такую серию импульсов можно формировать простым способом с помощью обычных импульсных генераторов. В современных электропневматических тормозах, управляемых посредством широтно-импульсной модуляции, такие серии импульсов уже присутствуют.
В наиболее простом в техническом отношении осуществлении указанного способа, импульсы считают в измерительном сигнале в течение заданного промежутка времени, причем сопоставление содержит сравнение пересчитанных импульсов в измерительном сигнале с числовым значением, соответствующим числу импульсов в контрольном сигнале в течение заданного промежутка времени. Так, как управляющая катушка во время фазы контрольного сигнала с импульсами не изменяет свою частоту, в измерительном сигнале должно присутствовать количество импульсов из контрольного сигнала 1:1. Тем не менее, независимо от этого критерия, отсутствие серии импульсов в измерительном сигнале или постоянно активный измерительный сигнал можно расценивать, как короткое замыкание или как разрыв, смотря по тому, как на какой стороне управляющей катушки снимают измерительный сигнал.
В другом усовершенствованном варианте представленного способа, управляющая катушка подключена параллельно к делителю напряжения со стороны питания, причем измерительный сигнал снимают в точке промежуточного потенциала делителя напряжения со стороны питания. Измерительный сигнал и контрольный сигнал могут формироваться в зависимости от программы при выборе делителя напряжения, исходя из сравнительно высокого рабочего напряжения для электромагнитного клапана, например, 24V и сниматься, тем не менее, чувствительной схемой обработки сигнала, в которую подают сравнительно низкие входные напряжения, например, 3V.
В дополнительном усовершенствованном варианте предлагаемого способа, управляющая катушка подключена последовательно к делителю напряжения со стороны эталонного потенциала, причем контрольный сигнал подают в точку промежуточного потенциала делителя напряжения со стороны эталонного потенциала. Если эталонный потенциал является массой, это обеспечивает, что контрольный сигнал не подается непосредственно в эталонный потенциал, не оказывая при этом воздействие на сторону питания делителя напряжения, и может сниматься на ней в виде измерительного сигнала.
В особенном усовершенствованном варианте предлагаемого способа, соотношение между делителем напряжения и управляющей катушкой составляет 1:50 и 1:200, в частности, 1:75 и 1:150, особенно предпочтительно, около 1:100. В пределах этих значений обеспечивается, в частности, наблюдение за контрольным сигналом в виде импульса в неактивной испытываемой катушке, по существу сильно поглощающей контрольный сигнал, вследствие ее индуктивных свойств.
В особенно предпочтительном усовершенствованном варианте предлагаемого способа имеется другой электромагнитный клапан с другой управляющей катушкой, причем оба электромагнитных клапана соединены последовательно, а контрольный сигнал подводят в точке промежуточного потенциала между обоими электромагнитными клапанами.
В этой компоновке можно особенно эффективно вместе контролировать другой электромагнитный клапан. Для этого снимают другой измерительный сигнал на находящейся напротив точки промежуточного потенциала стороне другого электромагнитного клапана и определяют состояние другого электромагнитного клапана, исходя из сопоставления контрольного сигнала и другого измерительного сигнала. Благодаря этому, можно контролировать оба электромагнитных клапана с помощью единственного источника сигналов для создания контрольного сигнала.
Указанную прежде компоновку можно расширить до любого количества других электромагнитных клапанов в виде звездочки.
Согласно следующему аспекту изобретения, предлагается устройство управления для осуществления способа по любому из предыдущих пунктов формулы изобретения.
В усовершенствованном варианте предлагаемого устройства управления, предлагаемое устройство имеет запоминающее устройство и процессор. При этом указанный способ заложен в виде компьютерной программы в память в запоминающем устройстве, а процессор предусмотрен для осуществления способа, если компьютерная программа загружена из запоминающего устройства в процессор.
Согласно следующему аспекту изобретения компьютерная программа содержит средство программного кода для осуществления всех этапов предлагаемого способа, если компьютерная программа выполнена в компьютере или в одном из предложенных устройств.
Согласно следующему аспекту изобретения продукт компьютерной программы содержит программный код, записанный на машиночитаемом носителе данных и осуществляющий один из предложенных способов в устройстве для обработки данных.
Согласно другому аспекту изобретения, электропневматический тормоз содержит наполняемый с помощью давления воздуха тормозной цилиндр для управления тормозным приводным устройством, источник сжатого воздуха для наполнения тормозного цилиндра, электромагнитный клапан для управляемой подачи давления воздуха из источника сжатого воздуха в тормозной цилиндр и одно из предлагаемых устройств для управления для контроля состояния электромагнитного клапана.
Согласно другому аспекту изобретения транспортное средство, в частности, транспортное средство хозяйственного назначения в виде седельного тягача, содержит одно из предложенных устройств для управления и/или предложенный электропневматический тормоз.
Далее приводится более подробное разъяснение изобретения с помощью примеров исполнения со ссылкой на чертежи. На них показаны:
фиг. 1 - схематический вид транспортного средства с тормозным устройством;
фиг. 2 - схематический вид схемы для управления электромагнитными клапанами в тормозном устройстве транспортного средства по фиг. 1; и
фиг. 3a–5 - блок-схемы устройств контроля для контроля работы электромагнитных клапанов в тормозном устройстве транспортного средства по фиг. 1 со схемой по фиг. 2.
Одинаковые технические элементы снабжены на схеме одинаковыми ссылочными позициями и описываются только один раз.
На фиг. 1 схематически показано транспортное средство выполненного в виде седельного тягача 2 транспортного средства хозяйственного назначения. Седельный тягач 2 имеет шасси 4, несущие колеса 6 с возможностью вращения посредством оси 8. Колеса 6 приводятся в движение для передвижения седельного тягача 2 по отдельности или все вместе посредством не изображенной подробно системы привода. Такие системы привода широко известны и далее не являются предметом обсуждения.
Для торможения движущегося седельного тягача 2 во время эксплуатации (действие рабочей тормозной системы) или для удерживания седельного тягача 2 в неподвижном состоянии (стояночное действие), чтобы он самопроизвольно не двигался, в нем размещена тормозная система 10. Тормозная система 10 содержит в каждом колесе 6 тормоз 12, который расположен неподвижно напротив соответствующего колеса 6 на шасси 4.
Каждый тормоз 12 имеет не изображенное далее тормозное приводное устройство, воздействующее соответствующим образом на колесо 6, блокирующее его и предотвращающее, в частности, вращение колеса 6 относительно шасси 4. На передней оси 8 перемещаются не показанные тормозные приводные устройства тормозных цилиндров 13, инициирующие в седельном тягаче 2 только действие рабочей тормозной системы. В противоположность этому, тормозные приводные устройства на задних осях 8 перемещаются с помощью так называемых комбинированных тормозных цилиндров 14, инициирующих в седельном тягаче 2, как действие рабочей тормозной системы, так и стояночное тормозное действие. Такие тормозные цилиндры широко известны и не будут описываться далее. Все тормозные цилиндры 13, 14 пневматическими заполняются посредством пунктирно показанного на фиг. 1 трубопровода 16 сжатого воздуха сжатым воздухом, отбираемым из источника 18 сжатого воздуха. Функционирование таких тормозов широко известно и далее не является предметом обсуждения.
Для управления давлением воздуха в тормозных цилиндрах 13, 14 каждый тормоз 12 содержит электромагнитный клапан 20 с возможностью регулирования давления воздуха в соответствующем тормозном цилиндре 13, 14, регулируя степень открывания не показанного подробно входного отверстия между соответствующим трубопроводом 16 сжатого воздуха в соответствующем тормозном цилиндре 13, 14.
Включение отдельных электромагнитных клапанов 20 осуществляют электрически. Вследствие комбинации электрически управляемых электромагнитных клапанов 20 и пневматически эксплуатируемых тормозных цилиндров 13, 14, тормоза 12 называют, как уже было упомянуто, электропневматическими.
Для управления на каждый электромагнитный клапан 20 подают ток из линии 22 управления со стороны питающего напряжения и линии 24 управления со стороны эталонного потенциала. Устройство 26 управления может быть сконструировано, по существу, согласно техническому решению из публикации DE 195 13 621 B4, согласно которому несколькими электромагнитными клапанами 20 можно управлять вместе, исходя из необходимости 28 торможения, посредством линий 22, 24 управления.
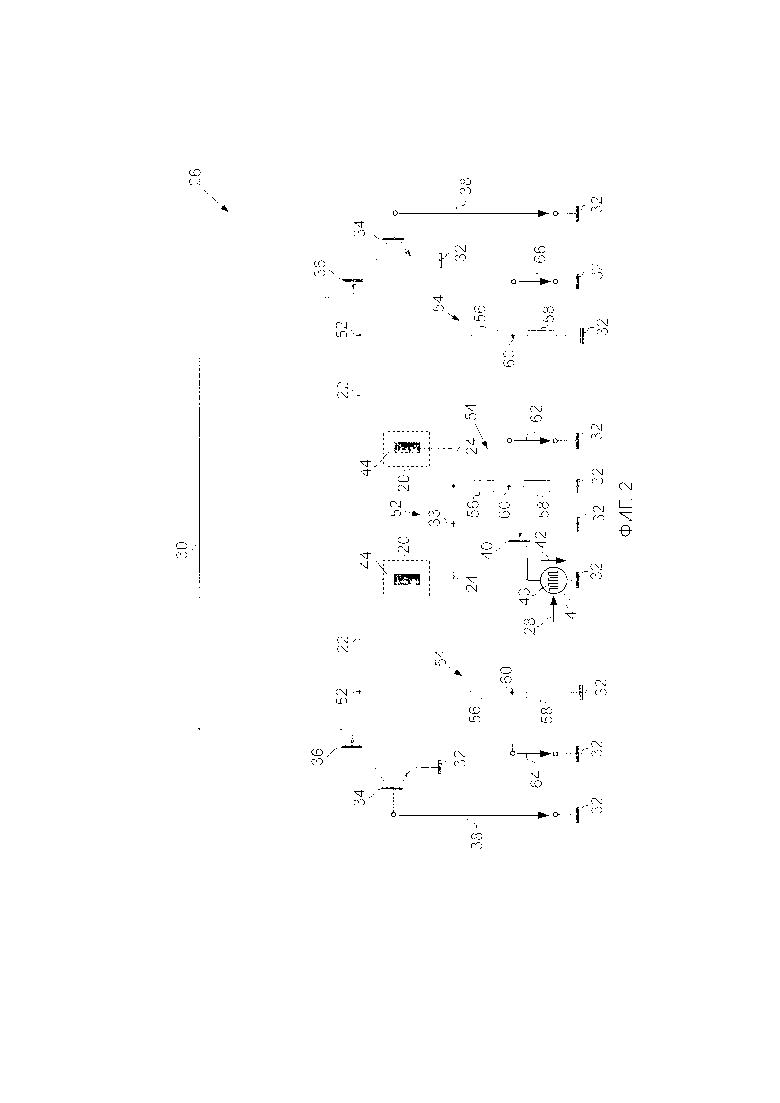
Это разъясняется ниже довольно сильно упрощенно посредством фиг. 2. показывающей часть устройства 26 управления, управляющего электромагнитными клапанами 20 двух тормозов 12 на одной из осей 8 в седельном тягаче 2. Относительно подробностей эксплуатации рабочих тормозов и стояночных тормозов в седельных тягачах следует обратиться к соответствующей литературе.
Оба электромагнитных клапана 20 подключены Т – образно в устройстве 26 управления посредством линий 22, 24 управления между линией 30 питающего напряжения и эталонным потенциалом 32 в виде массы, причем точка 33 Т направлена на стороне эталонного потенциала 32.
Со стороны питающего напряжения линии 22 управления размыкаются отдельно с помощью каскадной схемы из биполярного НПН-транзистора 34 предусилителя и силового выключателя 36 в виде МОП-транзистора с каналом р-типа. При условии, что линии 24 управления со стороны эталонного потенциала также являются управляющими, благодаря этому можно отдельно притормаживать колеса 6, например, для реализации автоматического регулирования динамики автомобиля. Для этого из соответствующего не показанного регулятора состояния системы регулирования динамики автомобиля подают отдельное управляющее напряжение 38 в соответствующий транзистор 34 предусилителя, управляющее, в свою очередь, соответствующим силовым выключателем 36. Вследствие этого размыкается соответствующая со стороны питающего напряжения линия 22 управления, а линия 30 питающего напряжения отсоединяется от соответствующего электромагнитного клапана 20.
На стороне эталонного потенциала 32, учитывая эталонный потенциал 32, перед точкой 33 Т расположен общий управляющий выключатель 40 в виде МОП-транзистора с каналом n-типа. С помощью этого общего управляющего выключателя 40 Т - образно соединенные со стороны эталонного потенциала линии 24 управления могут замыкаться все вместе. При условии, что со стороны питающего напряжения все линии 22 управления замкнуты, соединенные в Т-образной схеме электромагнитные клапаны 20 могут присоединяться, вследствие этого, вместе к эталонному потенциалу 32.
Общий управляющий выключатель 40 управляется с помощью источника 41 напряжения, подающего на общий управляющий выключатель 41, исходя из необходимости 28 торможения, управляющее напряжение 42 в виде сигнала 43 широтно-импульсной модуляции, ниже называемого ШИМ- сигналом 43.
В каждом электромагнитном клапане 20 имеется управляющая катушка 44, обеспечиваемая напряжением посредством линий 22, 24 управления, если указанным прежде способом подключены, как соответствующий индивидуальный силовой выключатель 36, так и общий управляющий выключатель 40. Соответствующая управляющая катушка 44 создает известным способом магнитное поле, зависящее от ширины импульса сигнала 43 широтно-импульсной модуляции. С помощью этого магнитного поля соответствующая управляющая катушка 44 регулирует известным способом степень открывания соответствующего, ведущего к тормозу 12 направляющего трубопровода 16 сжатого воздуха для регулирования уровня давления в системе тормозного привода тормоза 12.
Хотя устройство 26 управления описывалось с Т - образно разветвляющимися со стороны эталонного потенциала линиями 24 управления, разветвление, однако может быть любым, в частности, любым звездообразным, например, как это известно из публикации DE 10 2008 060 720 B3. В частности, все тормоза 12 обеих задних осей 8 седельного тягача 2 могут управляться посредством общего управляющего выключателя 40.
По соображениям безопасности необходимо контролировать исправное функционирование электромагнитных клапанов 20 и содержащихся в них управляющих катушек 44. Для этого в публикации WO 2001/066 397 A1 уже предложено контролировать потенциал со стороны питающего напряжения линии 22 управления. Благодаря этому, можно распознавать короткие замыкания в соответствующей управляющей катушке 44, если потенциал на линии 22 управления со стороны питающего напряжения, несмотря на замкнутый переключатель 36, 40, равен или примерно равен эталонному потенциалу 32. В другой комбинации состояния переключателей 36, 40 контроль неисправности не возможен. Также распознают разрыв в соответствующей управляющей катушке 44.
В данном случае подключается данное исполнение с предложением: подавать или подводить в схему контрольный сигнал, либо на стороне линии 30 питающего напряжения, либо на стороне эталонного потенциала 32 и снимать его на соответственно находящейся на противоположной стороне одной из управляющих катушек 44 в виде измерительного сигнала. Для поддержания наименьших в коммутационном отношении затрат, в качестве контрольного сигнала используют управляющее напряжение 42 на стороне эталонного потенциала 32 в общем управляющем выключателе 40, в общей точке Т.
Измерительный сигнал измеряют через различные точки 52 отвода в устройстве 26 управления в делителях 54 напряжения, подключенных между соответствующими точками 52 отвода и эталонным потенциалом 32. Каждый делитель 54 напряжения содержит сопротивление 56 со стороны питающего напряжения и сопротивление 58 со стороны эталонного потенциала 58, соединенные в свою очередь друг с другом соответственно посредством точки 60 промежуточного потенциала.
В показанной на фиг. 2 схеме один из делителей 54 напряжения подключен в точке 33 Т на стороне эталонного потенциала 32. Поэтому точка 33 Т одновременно служит в качестве точки 52 отвода. В точке 60 промежуточного потенциала этого делителя 54 напряжения измеряют первый измерительный сигнал 62. Второй делитель 54 напряжения подключен на стороне линии 30 питающего напряжения, параллельно к одному из электромагнитных клапанов 20, между ним и его силовым выключателем 3, в то время, как третий делитель 54 напряжения подключен соответствующим способом параллельно к другому электромагнитному клапану 20. В точке 60 промежуточного потенциала этих делителей 54 напряжения измеряют соответствующим образом второй измерительный сигнал 64 и третий измерительный сигнал 66.
Затем измеренные измерительные сигналы 62 - 66 могут обрабатываться ниже описанным способом для контроля работы электромагнитных клапанов 20 и содержащихся в них управляющих катушек 44. Это подробно разъясняется далее со ссылкой на фигуры 3a - 5c.
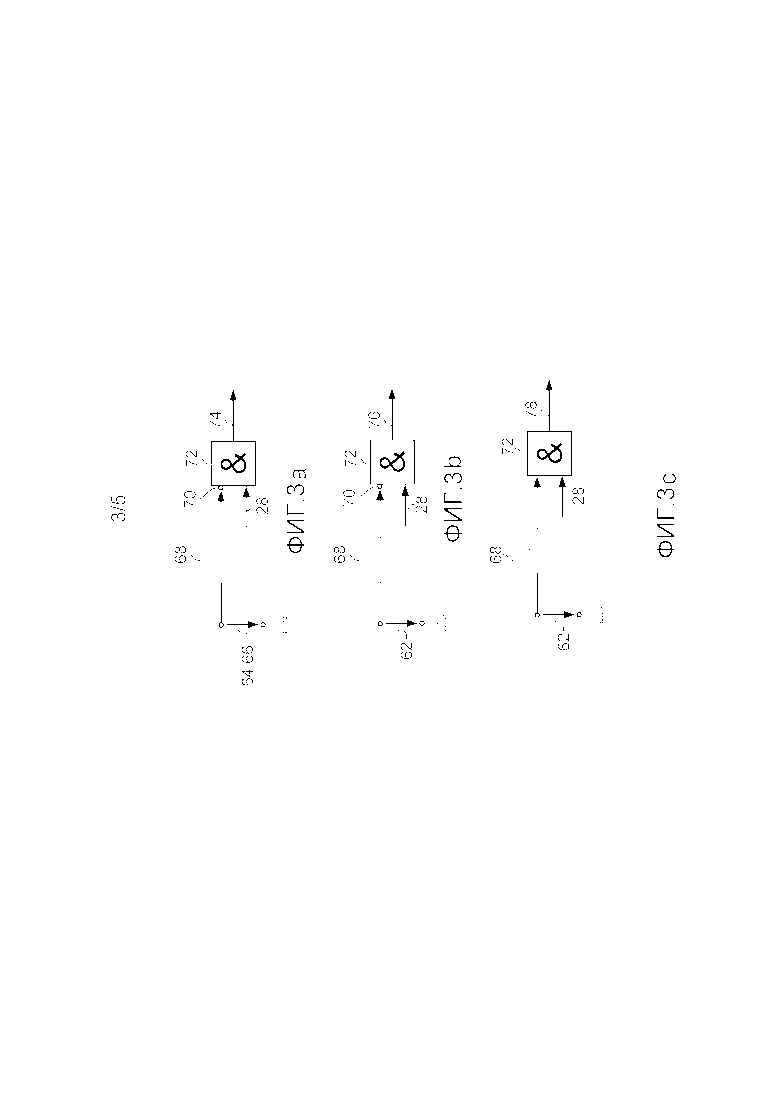
С помощью блок-схемы по фиг. 3a можно контролировать во время эксплуатации тормоза 12, а вследствие этого, во время активной необходимости 28 торможения, имеют ли электромагнитные клапаны 20 на стороне линии 30 питающего напряжения короткое замыкание с эталонным потенциалом 32, перемыкающим силовые выключатели 36.
Для этого с помощью фильтра 68 нижних частот отфильтровывают из второго измерительного сигнала 64 или третьего измерительного сигнала 66 сигнал 43 широтно-импульсной модуляции и направляют его к отрицательному входу 70 UND-элемента 72. Одновременно необходимости торможения 28 подается в UND-элемент 72. Если теперь, несмотря на активную необходимости 28 торможения отфильтрованный фильтром нижних частот второй измерительный сигнал 64 или отфильтрованный фильтром нижних частот третий измерительный сигнал 66 остаются неактивными, это означает, что потенциал соответствующих точек 52 отвода равен эталонному потенциалу 32, хотя вследствие в сущности протекающего электрического тока нужно было бы ожидать рабочий потенциал. Поэтому соответствующая точка 52 отвода должна быть замкнута накоротко с эталонным потенциалом 32. В этом случае к UND-элементу 72 подходят два положительных сигнала вследствие инвертированного и отфильтрованного измерительного сигнала 64, 66 и выдается соответствующее сообщение о коротком замыкании эталонного потенциала 74.
С помощью блок-схемы по фиг. 3b можно контролировать во время эксплуатации тормоза 12, а вследствие этого, во время активной необходимости 28 торможения, имеют ли управляющие катушки 44 электромагнитных клапанов 20 разрыв.
Для этого с помощью фильтра 68 нижних частот из первого измерительного сигнала 62 отбирают сигнал 43 широтно-импульсной модуляции и направляют его к отрицательному входу 70 UND-элемента 72. Одновременно необходимость 28 торможения передается в UND-элемент 72. Если теперь, вопреки активной необходимости 28 торможения, отфильтрованный фильтром 68 нижних частот первый измерительный сигнал 62 остается неактивным, это значит, что потенциал точки 33 Т равен эталонному потенциалу 32, хотя, вследствие, по существу, протекающего электрического тока через делитель 54 напряжения, напряжение должно было бы спадать, а поэтому следовало бы ожидать другой потенциал. Поэтому нужно исходить из того, что электрический ток не протекает, а управляющие катушки 44 электромагнитных клапанов 20 имеют разрыв. В этом случае в UND-элемент 72 приходят два положительных сигнала, вследствие инвертированного и отфильтрованного первого измерительного сигнала и выдается соответствующее сообщение 76 о разрыве. Хотя однозначным это сообщение о разрыве не является, тем не менее, речь при этом может идти также о коротком замыкании между выходом из одного из электромагнитных клапанов 20 на стороне эталонного потенциала 32 и эталонным потенциалом 32, перемыкающим управляющий выключатель 40. Однако, о какой еще неисправности в данном случае может идти речь, ее также нельзя определить с помощью способа из публикации WO 2001 / 066 397 A1.
С помощью блок-схемы по фиг. 3c можно контролировать во время эксплуатации тормоза 12 и вместе с тем, во время активной необходимости 28 торможения, имеет ли выход управляющей катушки 44 электромагнитных клапанов 20 короткое замыкание на стороне эталонного потенциала 32 с линией 30 питающего напряжения.
Для этого с помощью фильтра 68 нижних частот из первого измерительного сигнала 62 отбирают сигнал 43 широтно-импульсной модуляции и направляют его UND-элементу 72. Одновременно необходимость 28 торможения приходит в UND-элемент 72. Если теперь, несмотря на активную необходимость 28 торможения отфильтрованный фильтром нижних частот первый измерительный сигнал 62 остается активным, это значит, что потенциал точки 33 Т равен потенциалу линии 30 питающего напряжения, хотя вследствие протекающего, по существу, через управляющие катушки 44 электрического тока, электрический потенциал должен быть бы ниже. Поэтому можно исходить из того, что соответствующий выход электромагнитного клапана 20 подключен к линии 30 питания и имеется соответствующее короткое замыкание. В этом случае в UND-элемент 72 приходят два положительных сигнала и выдается соответствующее сообщение 78 короткого замыкания питающего напряжения. Также и этот случай неисправности нельзя определить с помощью способа в публикации WO 2001/066 397 A1.
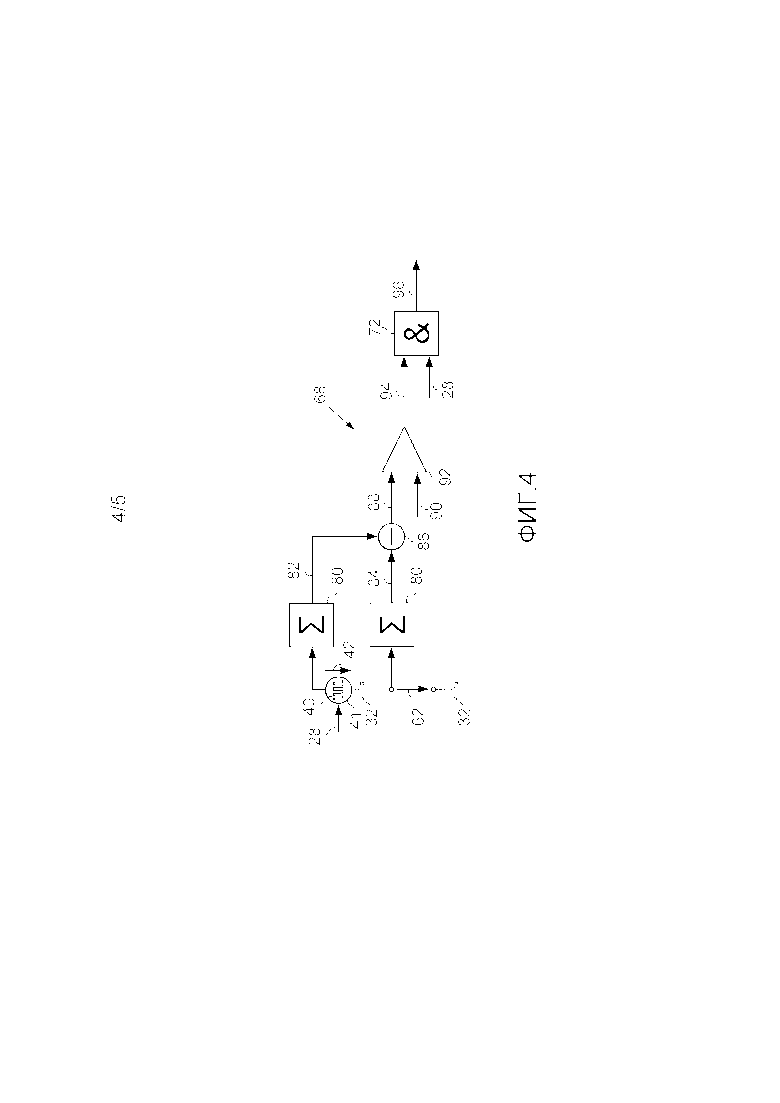
Для проверки выхода электромагнитных клапанов 20 на стороне эталонного потенциала 32 на предмет других, не определенных по отдельности неисправностей, дополнительно к этому, как показано на фиг. 4, командный сигнал 42 сравнивают с первым измерительным сигналом 62 ниже описанным способом.
При исправной эксплуатации тормоза 12 частота командного сигнала 42 должна передаваться неизменно в делитель 54 напряжения, при снимании первого измерительного сигнала 62, так, как на этом пути отсутствуют фильтрующие или поглощающие частоту конструктивные элементы. Поэтому в накапливающих сумматорах определяют частоту 82 командного сигнала 42 и частоту 84 первого измерительного сигнала 62. Затем с помощью вычитающего элемента 86 определяют разность 88 частот между обеими частотами 82, 84. Если эта разность частот превышает определенный порог 90, сравнивающее устройство 92 выводит сигнал 94 отклонения. С помощью UND-элемента 72 сигнал 94 отклонения преобразуется в общий сигнал 96 рассогласования, если возникает сигнал 94 отклонения, несмотря на имеющуюся необходимость торможения, так как в этом случае должно выполняться прежде указанное условие исправной эксплуатации тормоза 12.
Таким же образом, как это описано со ссылкой на фиг. 4, можно контролировать также управляющую катушку 44 электромагнитного клапана 20, остающимся неактивным из-за разомкнутого силового выключателя 34. В этом случае частота 82 управляющего напряжения 42 передается в соответствующий делитель 54 напряжения, параллельный к неактивному электромагнитному клапану 20, так как управляющая катушка 44 неактивного электромагнитного клапана 20 хотя и имеет, в частности, поглощающее сигнал действие, однако, не изменяющее его частоту. Воздействие поглощающей сигнал управляющей катушки 44 может уменьшаться при правильном выборе соотношения между обоими сопротивлениями 56, 58 соответствующего делителя 54 напряжения и управляющей катушки 44. Несколько испытаний показали, что соотношение может быть оптимальным 1:100 между полным сопротивлением сопротивлений 56, 58 делителя 54 напряжения и индуктивностью соответствующей управляющей катушки 44. Тем не менее, это соотношение нужно согласовывать, в любом случае, в зависимости от программы.
С помощью блок-схемы по фиг. 5 можно контролировать состояние неактивного электромагнитного клапана 20 и его управляющей катушки 44. Действуя аналогично с блок-схемой по фиг. 4, при этом определяется не частота 84 первого измерительного сигнала 62, а частота 98 второго измерительного сигнала 64 или третьего измерительного сигнала 66, в зависимости от того, какой из неактивных электромагнитных клапанов 20 нужно контролировать. Если сравнивающее устройство 92 на фиг. 5 выдает сигнал 94 отклонения, то UND-элемент 72 выдает при отключенном соответствующем индивидуальном командном сигнале 38 сигнал 99 неисправности катушки, сообщающий о более не идентифицируемой неисправности в управляющей катушке 44 неактивного электромагнитного клапана 20. Для продолжения конкретизации этой неисправности, можно было бы аналогично с фиг. 3b и фиг. 3c исследовать потенциал в соответствующей точке 52 отвода. В любом случае, неисправность по фиг. 5 также нельзя определить с помощью способа, известного из публикации WO 2001/066 397 A1.
На фиг. 5 – отключенный в UND-элементе 72 индивидуальный командный сигнал 38 является предпосылкой, что выдается сигнал 99 неисправности катушки. Это необходимо, так как в случае включенного индивидуального командного сигнала 38 соответствующая точка 52 отвода на стороне линии 30 питающего напряжения располагается длительно на его потенциале, и частоту нельзя измерить на ней, несмотря на исправную эксплуатацию и имеющийся командный сигнал 42 в управляющем выключателе 40.
Если в качестве контрольного сигнала, вместо командного сигнала 42, в схему по фиг. 2 активно подводить независимый контрольный сигнал, тогда также можно отказаться от условия, что индивидуальный командный сигнал 38 должен оставаться неактивным.
Список ссылочных позиций.
1.
2. Седельный тягач.
3.
4. Шасси.
6. Колесо.
8. Передние оси и задние оси.
10. Тормозная система.
12. Тормоз.
13. Тормозной цилиндр.
14. Комбинированный тормозной цилиндр.
16. Трубопроводы сжатого воздуха или источник сжатого воздуха.
18. Источник сжатого воздуха.
20. Электромагнитные клапаны.
22. Линия управления.
24. Линия управления.
26. Устройство управления.
28. Желание затормозить.
30. Линия питающего напряжения.
32. Эталонный потенциал
33. Точка Т.
34. Транзистор предусилителя.
36. Силовой выключатель.
38. Управляющее напряжение.
40. Управляющий выключатель.
41. Источник напряжения.
42. Контрольный сигнал.
43. Сигнал широтно-импульсной модуляции.
44. Управляющая катушка.
52. Точки отвода.
54. Делитель напряжения.
56. Сопротивление со стороны питающего напряжения.
58. Сопротивление со стороны эталонного потенциала.
60. Точка промежуточного потенциала.
62. Первый измерительный сигнал.
64. Второй измерительный сигнал.
66. Третий измерительный сигнал.
68. Фильтр нижних частот.
70. Отрицательный вход.
72. UND-элемент.
74. Сообщение о коротком замыкании эталонного потенциала.
76. Сообщение о разрыве.
78. Сообщение о коротком замыкании питающего напряжения.
80. Накопление.
82. Частота.
84. Частота.
86. Вычитающий элемент.
88. Разность частот.
90. Порог.
92. Сравнивающее устройство.
94. Сигнал отклонения.
96. Сигнал неисправности.
99. Сигнал неисправности катушки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Однопроводная электропневматическая тормозная система транспортного средства | 1983 |
|
SU1162647A1 |
| Комбинированный тормозной привод транспортного средства | 1983 |
|
SU1150129A1 |
| Электропневматическая тормозная система транспортного средства | 1980 |
|
SU925715A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВОЧНЫМ ТОРМОЗОМ | 2014 |
|
RU2643853C1 |
| Двухпроводная электропневматическая тормозная система прицепа | 1982 |
|
SU1090598A1 |
| Электропневматический тормозной привод сочлененного транспортного средства | 1989 |
|
SU1733284A1 |
| Устройство для автоматического регулирования в тормозных цилиндрах электропневматического тормоза | 1985 |
|
SU1281459A1 |
| Тормозной привод прицепного транспортного средства | 1987 |
|
SU1421575A1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВОЧНЫМ ТОРМОЗОМ И ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2730735C1 |
| ЭЛЕКТРООБОРУДОВАНИЕ АВТОМОБИЛЯ ИЛИ АВТОПОЕЗДА ИЗ ТЯГАЧА И, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПРИЦЕПА | 2018 |
|
RU2727630C1 |


Предложен способ контроля электромагнитного клапана (20) с управляющей катушкой (44) для управления давлением воздуха в тормозном цилиндре электропневматического тормоза. Электромагнитный клапан (20) имеет сторону (30) питающего напряжения, на которой посредством управляющей катушки (44) отбирают электрический питающий ток, и сторону (32) эталонного потенциала, на которой посредством управляющей катушки отдается электрический питающий ток. При осуществлении способа подают контрольный сигнал на стороне электромагнитного клапана (20). Снимают измерительный сигнал на другой стороне электромагнитного клапана (20). Определяют состояние электромагнитного клапана (20) исходя из сопоставления контрольного сигнала и измерительного сигнала. Предложены также устройство управления и электропневматический тормоз. Достигается усовершенствование контроля электромагнитного клапана. 3 н. и 9 з.п. ф-лы, 5 ил.
1. Способ контроля электромагнитного клапана (20) с управляющей катушкой (44) для управления давлением воздуха в тормозном цилиндре (13, 14) электропневматического тормоза (12), причем электромагнитный клапан (20) имеет сторону (30) питающего напряжения, на которой посредством управляющей катушки (44) отбирают электрический питающий ток, и сторону (32) эталонного потенциала, на которой посредством управляющей катушки отдается электрический питающий ток, содержащий этапы:
- подачи контрольного сигнала (42) на стороне (30, 32) электромагнитного клапана (20),
- снятия измерительного сигнала (62–64) на другой стороне (32, 30) электромагнитного клапана (20) и
- определения состояния (96, 99) электромагнитного клапана (20) исходя из сопоставления (80) контрольного сигнала (42) и измерительного сигнала (62, 66).
2. Способ по п. 1, причем контрольный сигнал (62) является зависимым от управления давлением воздуха в тормозном цилиндре (13, 14).
3. Способ по п. 1 или 2, причем контрольный сигнал (42) имеет заданную, изменяющуюся по времени продолжительность (43).
4. Способ по п. 3, причем продолжительность (43) по времени образована из множества импульсов.
5. Способ по п. 4, содержащий накопление (80) импульсов в измерительном сигнале (62 до 66) в течение заданного промежутка времени, причем сопоставление (80) содержит сравнение пересчитанных импульсов (84, 96) в измерительном сигнале (62 до 66) с числовым значением, соответствующим числу импульсов (82) в контрольном сигнале (42) в течение заданного промежутка времени.
6. Способ по любому из пп. 1-5, причем управляющую катушку (44) подключают параллельно к делителю (54) напряжения со стороны (30) питания, а измерительный сигнал (62–66) снимают в точке (60) промежуточного потенциала делителя (54) напряжения со стороны (30) питания.
7. Способ по любому из пп. 1-6, причем управляющую катушку (44) подключают последовательно к делителю (54) напряжения со стороны (32) эталонного потенциала, а контрольный сигнал (42) подают в точку (60) промежуточного потенциала делителя (54) напряжения со стороны (32) эталонного потенциала.
8. Способ по п. 6 или 7, причем соотношение между общим сопротивлением делителя (54) напряжения и индуктивностью управляющей катушки (44) составляет 1:50 и 1:200, в частности 1:75 и 1:150, особенно предпочтительно около 1:100.
9. Способ по любому из пп. 1-8, при котором имеется другой электромагнитный клапан (20) с другой управляющей катушкой (44), причем оба электромагнитных клапана (20, 20) соединяют последовательно, а контрольный сигнал (42) подводят в точке (33) промежуточного потенциала между обоими электромагнитными клапанами (20, 20).
10. Способ по п. 9, при котором:
- снимают другой измерительный сигнал (64, 66) на находящейся напротив точки (33) промежуточного потенциала стороне (30) другого электромагнитного клапана (20) и
- определяют состояние (99) другого электромагнитного клапана (20) исходя из сопоставления (80) контрольного сигнала (42) и другого измерительного сигнала (64, 66).
11. Устройство (56) управления для осуществления способа по любому из пп. 1-10.
12. Электропневматический тормоз (12), содержащий:
- наполняемый с помощью давления воздуха тормозной цилиндр (13, 14) для управления тормозным приводным устройством,
- источник (16) сжатого воздуха для наполнения тормозного цилиндра (13, 14),
- электромагнитный клапан (20) для управляемой подачи давления воздуха из источника (16) сжатого воздуха в тормозной цилиндр (13, 14) и
- устройство (56) управления по п. 11 для контроля состояния (96, 99) электромагнитного клапана (20).
| DE 10124109 A1, 12.12.2002 | |||
| Прибор для колки дров | 1930 |
|
SU25913A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ ТОРМОЗОМ | 2010 |
|
RU2428333C1 |

