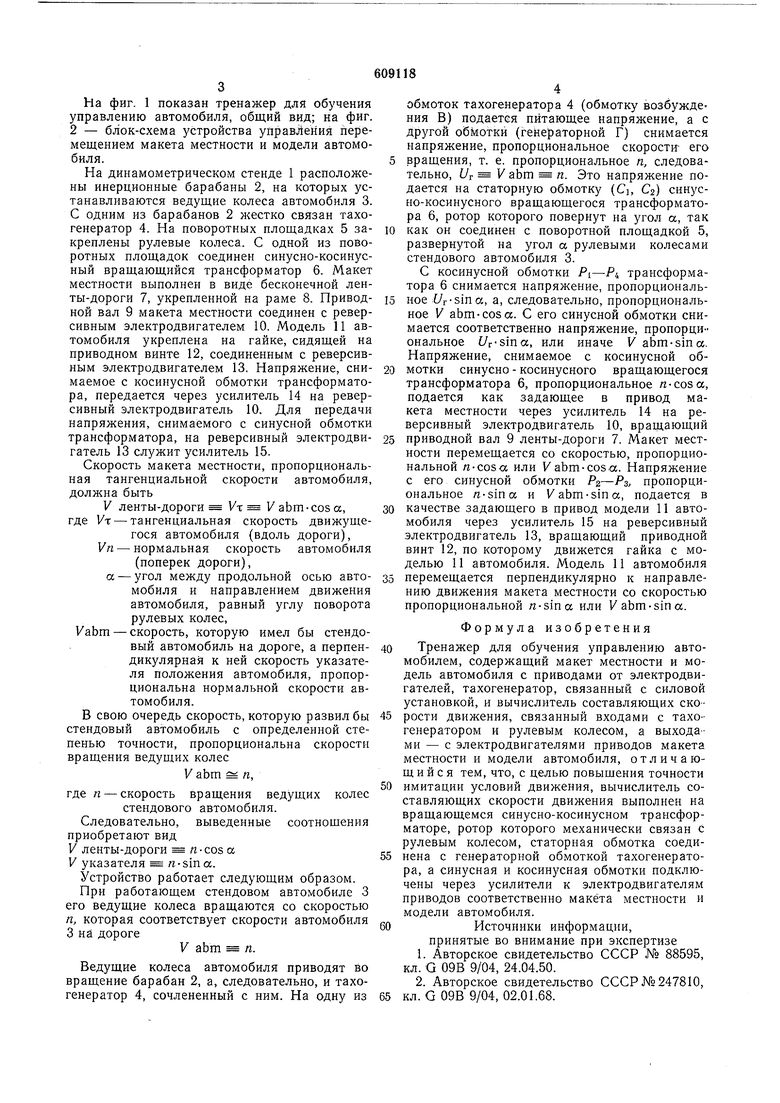
На фиг. 1 показан тренажер для обучения управлению автомобиля, общий вид; на фиг.
2- блок-схема устройства управления перемещением макета местности и модели автомобиля.
На динамометрическом стенде 1 расположены инерционные барабаны 2, на которых устанавливаются ведущие колеса автомобиля 3. С одним из барабанов 2 жестко связан тахогенератор 4. На поворотных площадках 5 закреплены рулевые колеса. С одной из поворотных площадок соединен синусно-косинусный вращающийся трансформатор 6. Макет местности выполнен в виде бесконечной ленты-дороги 7, укрепленной на раме 8. Приводной вал 9 макета местности соединен с реверсивным электродвигателем 10. Модель 11 автомобиля укреплена на гайке, сидящей на приводном винте 12, соединенным с реверсивным электродвигателем 13. Напряжение, снимаемое с косинусной обмотки трансформатора, передается через усилитель 14 на реверсивный электродвигатель 10. Для передачи напряжения, снимаемого с синусной обмотки трансформатора, на реверсивный электродвигатель 13 служит усилитель 15.
Скорость макета местности, пропорциональная тангенциальной скорости автомобиля, должна быть
V ленты-дороги VT Vabm-cosa, где Vt - тангенциальная скорость движущегося автомобиля (вдоль дороги), Vn - нормальная скорость автомобиля
(поперек дороги),
а - угол между продольной осью автомобиля и направлением движения автомобиля, равный углу поворота рулевых колес,
УаЬш - скорость, которую имел бы стендовый автомобиль на дороге, а перпендикулярная к ней скорость указателя положения автомобиля, пропорциональна нормальной скорости автомобиля.
В свою очередь скорость, которую развил бы стендовый автомобиль с определенной степенью точности, пропорциональна скорости вращения ведущих колес
V abm п,
где п - скорость вращения ведущих колес стендового автомобиля.
Следовательно, выведенные соотношения приобретают вид V ленты-дороги я-cos а, V указателя re-sina.
Устройство работает следующим образом.
При работающем стендовом автомобиле 3 его ведущие колеса вращаются со скоростью п, которая соответствует скорости автомобиля
3на дороге
V abm п.
Ведущие колеса автомобиля приводят во вращение барабан 2, а, следовательно, и тахогенератор 4, сочлененный с ним. На одну из
обмоток тахогенератора 4 (обмотку возбуждения В) подается питающее напряжение, а с другой обМоткй (генераторной Г) снимается напряжение, пропорциональное скорости- его вращения, т. е. пропорциональное п, следовательно, Ur V abm п. Это напряжение подается на статорную обмотку (d, €2) синусно-косинусного вращающегося трансформатора 6, ротор которого повернут на угол а, так
как он соединен с поворотной площадкой 5, развернутой на угол а рулевыми колесами стендового автомобиля 3.
С косинусной обмотки Pi-Pt, трансформатора 6 снимается напряжение, пропорциональное t/rSina, а, следовательно, пропорциональное V abm-cos ос. С его синусной обмотки снимается соответственно напряжение, пропорциональное t/rSina, или иначе l abm-sina. Напряжение, снимаемое с косинусной обмотки синусно - косинусного вращающегося трансформатора 6, пропорциональное л-cos а, подается как задающее в привод макета местности через усилитель 14 на реверсивный электродвигатель 10, вращающий
приводной вал 9 ленты-дороги 7. Макет местности перемещается со скоростью, пропорциональной «-cosa или V abm-cos а. Напряжение с его синусной обмотки Pg-РЗ, пропорциональное n-sina и Vabm-sina, подается в
качестве задающего в привод модели И автомобиля через усилитель 15 на реверсивный электродвигатель 13, вращающий приводной винт 12, по которому движется гайка с моделью 11 автомобиля. Модель 11 автомобиля
перемещается перпендикулярно к направлению движения макета местности со скоростью пропорциональной n-sina или Vabm-sina.
Формула изобретения
Тренажер для обучения управлению автомобилем, содержащий макет местности и модель автомобиля с приводами от электродвигателей, тахогенератор, связанный с силовой установкой, и вычислитель составляющих скорости движения, связанный входами с тахогенератором и рулевым колесом, а выходами - с электродвигателями приводов макета местности и модели автомобиля, отличающийся тем, что, с целью повышения точности
имитации условий движения, вычислитель составляющих скорости движения выполнен на вращающемся синусно-косинусном трансформаторе, ротор которого механически связан с рулевым колесом, статорная обмотка соедийена с генераторной обмоткой тахогенератора, а синусная и косинусная обмотки подключены через усилители к электродвигателям приводов соответственно макета местности и модели автомобиля.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 88595, кл. G 09В 9/04, 24.04.50.
2.Авторское свидетельство СССР №247810, кл. G 09В 9/04, 02.01.68.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Следящая система для отработки арктангенсной функции | 1973 |
|
SU488223A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ДОЗНЫХ ПОЛЕЙ | 2000 |
|
RU2192901C2 |
| ФОТОКОПИРОВАЛЬНАЯ ДВУХКАНАЛЬНАЯ СИСТЕМАУПРАВЛЕНИЯ | 1969 |
|
SU253543A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ДУГОВОЙ СВАРКИ КРИВОЛИНЕЙНЫХ ПОВОРОТНЫХ ИЗДЕЛИЙ | 1967 |
|
SU200082A1 |
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1969 |
|
SU247379A1 |
| Рулевое управление транспортного сред-CTBA CO ВСЕМи упРАВляЕМыМи КОлЕСАМи | 1979 |
|
SU823206A1 |

