Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов, классификации обнаруженных объектов.
Известны активные гидролокаторы, содержащие акустические излучающую и приемную антенны, устройство формирования зондирующего сигнала, генераторное устройство, устройство управления, устройство обработки эхо-сигналов от объекта, индикатор (Гидроакустические средства связи и наблюдения. - П.: Судостроение, 1982, С. 26, 27, 29, 33-39, 73, 122; Справочник по гидроакустике. А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. 2-е изд. - Л.: Судостроение, 1988. С. 18-26, 54-57).
Однако в этих гидролокаторах отсутствует система классификации обнаруженных объектов.
Известен активный гидролокатор с классификацией объекта (патент США №3716823, НКИ 340-3R), содержащий последовательно соединенные устройство управления, устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну, устройство обработки эхо-сигналов от объекта и устройство измерения классификационного параметра (анализатор спектра эхо-сигнала), ячейка памяти с эталонными спектрами эхо-сигналов от известных объектов, вычислительное устройство, с помощью которого производится сравнение спектральных составляющих эхо-сигналов с эталонными спектрами и индикатор.
Недостатком этого устройства является то, что эталонные спектры известны только для отражателей простейшего вида.
По количеству общих признаков наиболее близким аналогом предлагаемого изобретения является активный гидролокатор с классификацией объекта по патенту РФ 2528114, опубл. 10.09.2014. Этот гидролокатор содержит устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, приемную акустическую антенну, устройство обработки эхо-сигналов от объекта, устройство измерения классификационного параметра и блок определения апостериорной плотности вероятности класса объекта по текущей посылке N РапостаN.
Недостатком этого гидролокатора - прототипа является то, что в случае излучения только одной посылки имеет место недостаточная вероятность правильного решения о классе объекта. Необходимость использования одной посылки для классификации возникает вследствие ограниченности времени на решение задачи классификации для различных систем.
Задача изобретения заключается в сокращении времени решения задачи классификации активным гидролокатором.
Техническим результатом изобретения является повышение вероятности правильной классификации обнаруженного объекта за одну посылку.
Технический результат может быть реализован двумя вариантами решения технической задачи, связанными общим изобретательским замыслом.
По первому варианту для достижения указанного технического результата предлагается активный гидролокатор с классификацией объекта, содержащий последовательно соединенные устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащее последовательно соединенные приемную акустическую антенну, устройство обработки эхо-сигналов от объекта, устройство измерения классификационного параметра по эхо-сигналу с частотой f1 и блок определения Рапостf1 по эхо-сигналу на частоте f1, где Рапостf1 - апостериорная плотность вероятности класса объекта, в который введены новые признаки, а именно: устройство формирования зондирующего сигнала, генераторное устройство и устройство обработки эхо-сигналов от объекта выполнены многочастотными, введены N-1 устройств измерения классификационного параметра по эхо-сигналам  N-1 блок определения Paпocтf2…PaпocтfN по эхо-сигналам
N-1 блок определения Paпocтf2…PaпocтfN по эхо-сигналам  последовательно соединенные блок определения Рапост по совокупности Pапостf многочастотного эхо-сигнала
последовательно соединенные блок определения Рапост по совокупности Pапостf многочастотного эхо-сигнала  и блок выработки решения о классе объекта по совокупности частот, при этом 2, 3… N выходы устройства обработки многочастотных эхо-сигналов от объекта соединены с первыми входами N-1 устройств измерения классификационного параметра по эхо-сигналам
и блок выработки решения о классе объекта по совокупности частот, при этом 2, 3… N выходы устройства обработки многочастотных эхо-сигналов от объекта соединены с первыми входами N-1 устройств измерения классификационного параметра по эхо-сигналам  второй выход устройства формирования зондирующего многочастотного сигнала соединен со вторыми входами N устройств измерения классификационного параметра по эхо-сигналам
второй выход устройства формирования зондирующего многочастотного сигнала соединен со вторыми входами N устройств измерения классификационного параметра по эхо-сигналам  а выходы каждого из N-1 устройств измерения классификационных параметров по эхо-сигналам
а выходы каждого из N-1 устройств измерения классификационных параметров по эхо-сигналам  соединены с входами каждого соответствующего N-1 блоков определения Рапостf2… PanocтfN по эхо-сигналам
соединены с входами каждого соответствующего N-1 блоков определения Рапостf2… PanocтfN по эхо-сигналам  выходы N блоков определения Рапостf1…PanocтfN по эхо-сигналам
выходы N блоков определения Рапостf1…PanocтfN по эхо-сигналам  соединены со входом блока определения Рапост по совокупности Paпocтf многочастотного эхо-сигнала
соединены со входом блока определения Рапост по совокупности Paпocтf многочастотного эхо-сигнала 
По второму варианту предлагаемый активный гидролокатор не содержит N блоков определения Рапостf1…PaпocтfN по эхо-сигналам  а выходы N устройств измерения классификационного параметра по эхо-сигналам
а выходы N устройств измерения классификационного параметра по эхо-сигналам  непосредственно соединены со входом блока определения классификационного параметра по совокупности измерений на f1, f2… fN многочастотного эхо-сигнала, который через блок определения Рапост по совокупности частот соединен с блоком выработки решения о классе объекта по совокупности частот.
непосредственно соединены со входом блока определения классификационного параметра по совокупности измерений на f1, f2… fN многочастотного эхо-сигнала, который через блок определения Рапост по совокупности частот соединен с блоком выработки решения о классе объекта по совокупности частот.
Технический результат обоих вариантов активного гидролокатора достигается за счет осреднения результатов измерений по различным частотам путем обеспечения возможности определения классификационных параметров по многочастотному зондирующему сигналу, причем по первому варианту - за счет осреднения апостериорных вероятностей по различным частотам многочастотного эхо-сигнала, а по второму варианту - за счет осреднения классификационных параметров по различным частотам многочастотного эхо-сигнала.
Первый вариант решения технической задачи имеет преимущество, если классификационный параметр зависит от частоты многочастотного эхо-сигнала. В этом случае определение апостериорной вероятности по каждой частоте многочастотного эхо-сигнала и последующее определение апостериорной вероятности класса по совокупности Рапостf1…РапостfN многочастотного эхо-сигнала, позволит увеличить вероятность правильной классификации. Второй вариант технической задачи имеет преимущество, если классификационный параметр определяет, например, координаты и параметры движения объекта. В этом случае использование блока определения классификационного параметра по совокупности измерений на f1, f2… fN многочастотного эхо-сигнала позволит повысить точность оценки классификационного параметра, а следовательно, после вычисления апостериорной вероятности по совокупности частот увеличить вероятность правильной классификации.
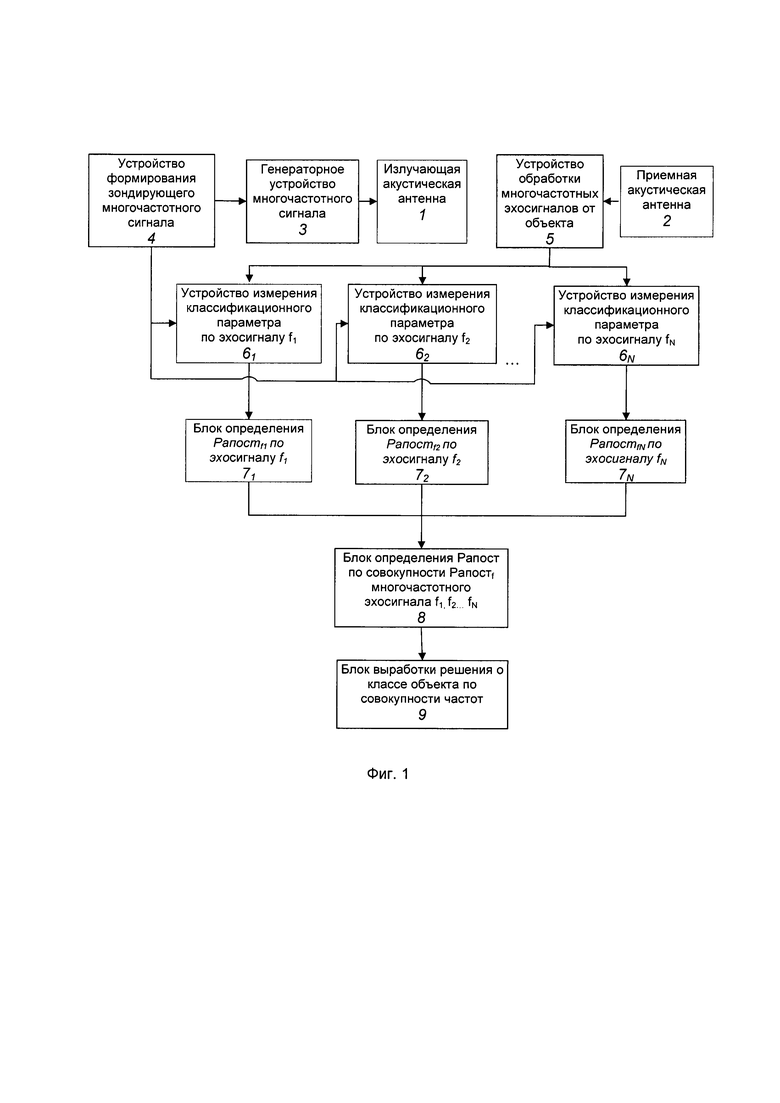
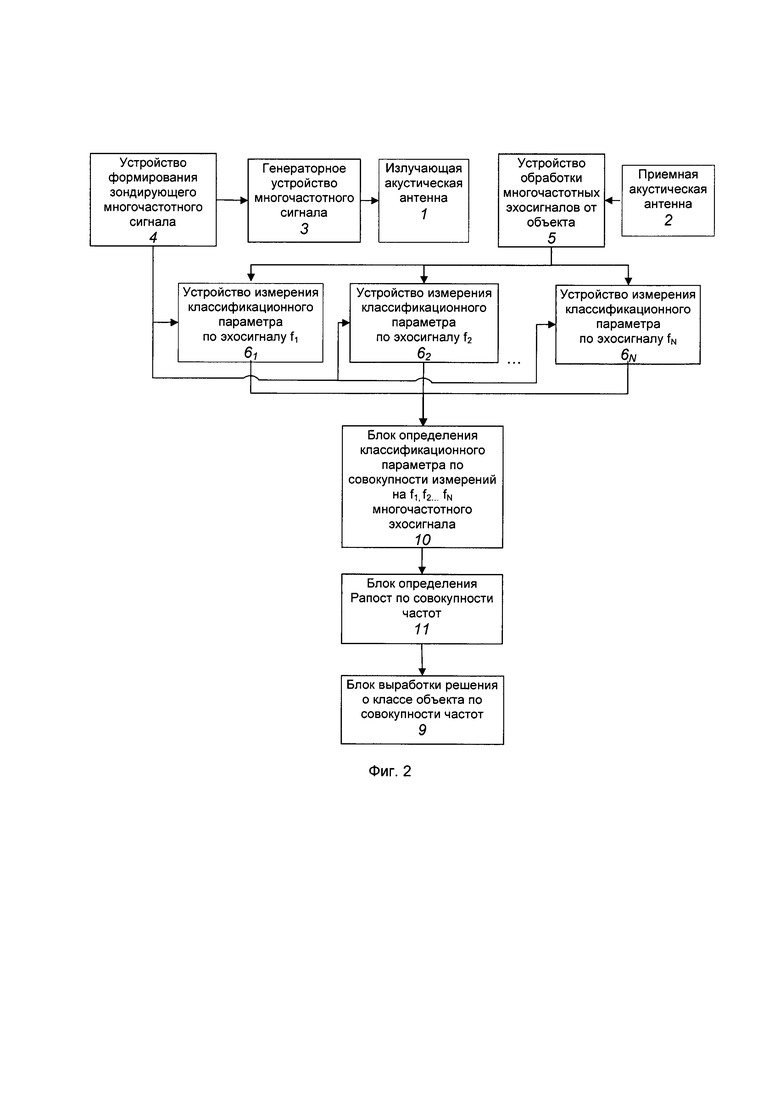
Сущность изобретения поясняется фиг. 1 и фиг. 2, на которых приведены блок-схемы первого и второго вариантов выполнения заявленного активного гидролокатора.
Первый вариант активного гидролокатора с классификации объекта (фиг. 1), содержит устройство 4 формирования зондирующего многочастотного сигнала, генераторное устройство многочастотного сигнала 3 и излучающую акустическая антенну 1, приемную акустическую антенну 2, устройство 5 обработки многочастотных эхо-сигналов от объекта, устройства 61, 62…6n измерения классификационного параметра по эхо-сигналу с частотами  блоки 71, 72…7N определения Рапостf1, Рапостf2…РапостfN по эхо-сигналу на частотам
блоки 71, 72…7N определения Рапостf1, Рапостf2…РапостfN по эхо-сигналу на частотам  где Рапост - апостериорная плотность вероятности класса объекта, блок 8 определения Рапост по совокупности Paпocтf многочастотного эхо-сигнала
где Рапост - апостериорная плотность вероятности класса объекта, блок 8 определения Рапост по совокупности Paпocтf многочастотного эхо-сигнала  и блок 9 выработки решения о классе объекта по совокупности частот.
и блок 9 выработки решения о классе объекта по совокупности частот.
Блок схема второго варианта (фиг.2) отличается от первого варианта, тем что в активном гидролокаторе с классификацией объекта вместо блоков определения Рапостf1, Paпocтf2…РапостfN по эхо-сигналу на частотам  блока 8 определения Рапост по совокупности Paпocтf многочастотного эхо-сигнала
блока 8 определения Рапост по совокупности Paпocтf многочастотного эхо-сигнала  введены блок 10 определения классификационного параметра по совокупности измерений на f1, f2… fn многочастотного эхо-сигнала и блок 11 определения Рапост по совокупности частот.
введены блок 10 определения классификационного параметра по совокупности измерений на f1, f2… fn многочастотного эхо-сигнала и блок 11 определения Рапост по совокупности частот.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики. Многочастотная работа активного локатора приведена во многих источниках, например, книге Теоретические основы радиолокации под ред. проф. Я.Д. Ширмана, учеб. пособие, М.: Сов. радио, 1970, с. 271.
Блок 5 может быть реализован на основе технического решения приведенного в книге Теоретические основы радиолокации под ред. проф. Я.Д. Ширмана, М.: Сов. радио, 1970, с. 401.
Блоки 61, 62…6n могут быть реализованы на основе технических решений приведенных в книге Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. - СПб.: Наука. С. 254-255.
Блоки 71, 72…7n могут быть реализованы на основе технических решений, приведенных в книге Горелик А.Л., Скрипкин В.А. Методы распознавания. М.: Высш. школа, 1984. С. 26-32.
Блок 10 выполняется с использованием сумматора, см. например, книгу Проектирование импульсных и цифровых устройств радиотехнических систем. /Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю. М. Казаринова. -М.: Высш. шк., 1985. - с. 15, 19.
Блок 8 может быть реализован с применением микропрограммных дискретных устройств, см. например, книгу Проектирование импульсных и цифровых устройств радиотехнических систем. /Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю.М. Казаринова. М.: Высш. шк., 1985. С. 164-177.
Блок 11 может быть реализован на основе технических решений, приведенных в книге Горелик А.Л., Скрипкин В.А. Методы распознавания. М.: Высш. школа, 1984. С. 26-32.
Блок 9 выполняется с использованием схемы сравнения, см. например, книгу Проектирование импульсных и цифровых устройств радиотехнических систем. /Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю.М. Казаринова. - М.: Высш. шк., 1985. С.15.
Работа заявленного гидролокатора осуществляется следующим образом. Устройство 4 формирования зондирующего многочастотного сигнала вырабатывает зондирующие многочастотные сигналы. Активный гидролокатор производит излучение зондирующего многочастотного сигнала с помощью генераторного устройства 3 и излучающей акустической антенны 1. Отраженные от объекта многочастотные эхо-сигналы с выхода приемной акустической антенны 2 поступают на устройство 5. Устройство 5 предназначено для выделения отдельных каналов с разными частотами. С выхода устройства 5 принятые сигналы поступают на устройства 61, 62…6N, обеспечивающие измерение классификационного параметра по каждому эхо-сигналу 
В блоках 71, 72… 7N на основе априорных вероятностей величин классификационного параметра и измеренных величин классификационного параметра, поступающего из блоков 61, 62…6n производится определение Paпocтf1 Рапостf2…PaпocтfN по эхо-сигналу на частотах 
Вычисленные величины Paпocтf1, Paпocтf2…PaпocтfN поступают в блок 8, где на основе соотношения, например, для двух альтернативных классов:

где Рапост(кл1) - вычисленная величина апостериорной вероятности по совокупности Рапостf(кл1) многочастотного сигнала f1: f2… fN.
В блоке 9 вырабатывается решение о классе объекта на основе Рапост, например, по максимуму из вычисленных апостериорных вероятностей Рапост(кл. 1) и Рапост(кл. 2).
Во втором варианте изобретения работа заявленного гидролокатора осуществляется в блоках 1-6, 9 так же, как и в первом варианте. В блоке 10 производится оценка классификационного параметра по совокупности измеренных классификационных параметров на частотах  например, в виде осреднения классификационных параметров. Далее в блоке 11 на основе априорной вероятности величины классификационного параметра и величины осредненного классификационного параметра, поступающего из блока 10, производится определение Рапост.
например, в виде осреднения классификационных параметров. Далее в блоке 11 на основе априорной вероятности величины классификационного параметра и величины осредненного классификационного параметра, поступающего из блока 10, производится определение Рапост.
Использование устройства обработки многочастотных эхо-сигналов от объекта, устройств измерения классификационного параметра по эхо-сигналу частотам  блоков определение Paпocтf1: Рапостf2…РапостfN по эхо-сигналу на частотам
блоков определение Paпocтf1: Рапостf2…РапостfN по эхо-сигналу на частотам  блока определения Рапост по совокупности Paпocтf многочастотного эхо-сигнала
блока определения Рапост по совокупности Paпocтf многочастотного эхо-сигнала  блока выработки решения о классе объекта по совокупности частот с соответствующими связями между этими блоками и связями этих блоков с другими блоками системы классификации для активного гидролокатора, обеспечивает за один цикл излучения - приема повышение вероятности правильной классификации обнаруженного объекта за счет осреднения результатов измерений по различным частотам многочастотного эхо-сигнала путем определения классификационного параметра по многочастотному зондирующему сигналу и экономит время для принятия решения.
блока выработки решения о классе объекта по совокупности частот с соответствующими связями между этими блоками и связями этих блоков с другими блоками системы классификации для активного гидролокатора, обеспечивает за один цикл излучения - приема повышение вероятности правильной классификации обнаруженного объекта за счет осреднения результатов измерений по различным частотам многочастотного эхо-сигнала путем определения классификационного параметра по многочастотному зондирующему сигналу и экономит время для принятия решения.
Таким образом, поставленная задача успешно решается.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНЫЙ ГИДРОЛОКАТОР С КЛАССИФИКАЦИЕЙ ОБЪЕКТА | 2013 |
|
RU2528114C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2528113C1 |
| Способ классификации эхо-сигнала гидролокатора | 2017 |
|
RU2660219C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2626295C1 |
| Гидроакустический способ управления торпедой | 2017 |
|
RU2649675C1 |
| Гидролокационный способ обнаружения объекта и измерения его параметров | 2017 |
|
RU2674552C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2015 |
|
RU2590226C1 |
| Способ обсервации подводного аппарата | 2021 |
|
RU2763114C1 |
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
Использование: изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов, классификации обнаруженных объектов. Сущность: активный гидролокатор с классификацией объекта в первом варианте осуществляют за счет осреднения апостериорных вероятностей по различным частотам многочастотного эхо-сигнала, а во втором варианте - за счет осреднения классификационных параметров по различным частотам многочастотного эхо-сигнала. Технический результат: повышение вероятности правильной классификации обнаруженного объекта путем обеспечения возможности определения классификационных параметров по многочастотному эхо-сигналу. 2 н.п. ф-лы, 2 ил.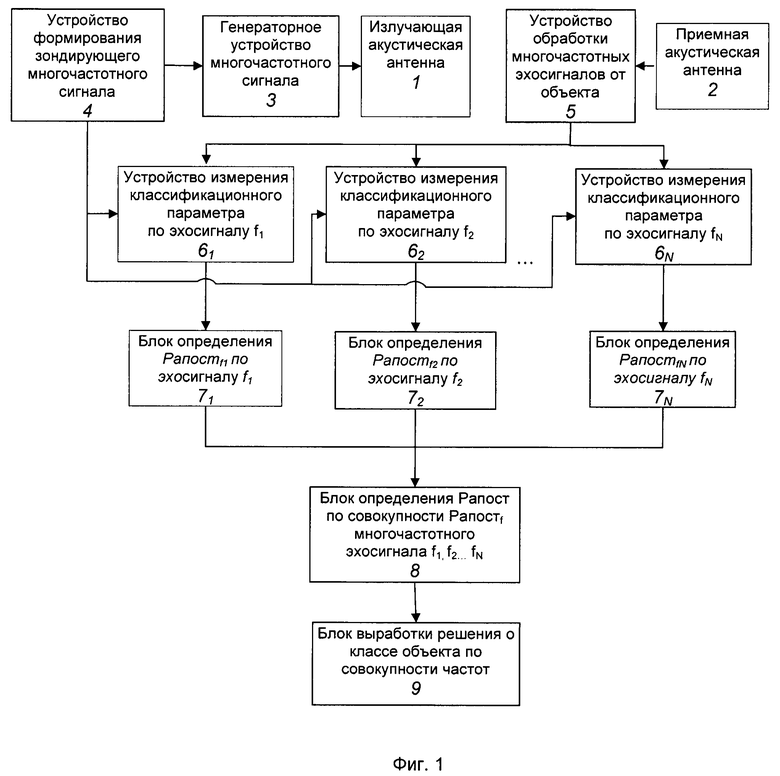
1. Активный гидролокатор с классификацией объекта, содержащий последовательно соединенные устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство обработки эхо-сигналов от объекта, устройство измерения классификационного параметра по эхо-сигналу с частотой f1 и блок определения Рапостf1 по эхо-сигналу на частоте f1, где Рапостf1 - апостериорная плотность вероятности класса объекта, отличающийся тем, что устройство формирования зондирующего сигнала, генераторное устройство и устройство обработки эхо-сигналов от объекта выполнены многочастотными, введены N-1 устройств измерения классификационного параметра по эхо-сигналам  N-1 блок определения Pапостf2…РапостfN по эхо-сигналам
N-1 блок определения Pапостf2…РапостfN по эхо-сигналам  последовательно соединенные блок определения Рапост по совокупности Pапостf многочастотного эхо-сигнала
последовательно соединенные блок определения Рапост по совокупности Pапостf многочастотного эхо-сигнала  и блок выработки решения о классе объекта по совокупности частот, при этом 2, 3… N выходы устройства обработки многочастотных эхо-сигналов от объекта соединены с первыми входами N-1 устройств измерения классификационного параметра по эхо-сигналам
и блок выработки решения о классе объекта по совокупности частот, при этом 2, 3… N выходы устройства обработки многочастотных эхо-сигналов от объекта соединены с первыми входами N-1 устройств измерения классификационного параметра по эхо-сигналам  второй выход устройства формирования зондирующего многочастотного сигнала соединен со вторыми входами N устройств измерения классификационного параметра по эхо-сигналам
второй выход устройства формирования зондирующего многочастотного сигнала соединен со вторыми входами N устройств измерения классификационного параметра по эхо-сигналам  а выходы каждого из N-1 устройств измерения классификационных параметров по эхо-сигналам
а выходы каждого из N-1 устройств измерения классификационных параметров по эхо-сигналам  соединены с входами каждого соответствующего N-1 блока определения Pапостf2…PапостfN по эхо-сигналам
соединены с входами каждого соответствующего N-1 блока определения Pапостf2…PапостfN по эхо-сигналам  выходы N блоков определения Рапостf1…РапостfN по эхо-сигналам
выходы N блоков определения Рапостf1…РапостfN по эхо-сигналам  соединены со входом блока определения Рапост по совокупности Pапостf многочастотного эхо-сигнала
соединены со входом блока определения Рапост по совокупности Pапостf многочастотного эхо-сигнала 
2. Активный гидролокатор с классификацией объекта, содержащий последовательно соединенные устройство формирования зондирующего сигнала, генераторное устройство и излучающую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство обработки эхо-сигналов от объекта, устройство измерения классификационного параметра по эхо-сигналу f1, отличающийся тем, что устройство формирования зондирующего сигнала, генераторное устройство и устройство обработки эхо-сигналов от объекта выполнены многочастотными, введены N-1 устройств измерения классификационного параметра по эхо-сигналам  последовательно соединенные блок определения классификационного параметра по совокупности измерений на f1, f2…fN многочастотного эхо-сигнала, блок определения Рапост по совокупности частот и блок выработки решения о классе объекта по совокупности частот, при этом 2…N выходы устройства обработки многочастотных эхо-сигналов от объекта соединены с первыми входами N-1 устройств измерения классификационного параметра по эхо-сигналам
последовательно соединенные блок определения классификационного параметра по совокупности измерений на f1, f2…fN многочастотного эхо-сигнала, блок определения Рапост по совокупности частот и блок выработки решения о классе объекта по совокупности частот, при этом 2…N выходы устройства обработки многочастотных эхо-сигналов от объекта соединены с первыми входами N-1 устройств измерения классификационного параметра по эхо-сигналам  второй выход устройства формирования зондирующего многочастотного сигнала соединен со вторыми входами N устройств измерения классификационного параметра по эхо-сигналам
второй выход устройства формирования зондирующего многочастотного сигнала соединен со вторыми входами N устройств измерения классификационного параметра по эхо-сигналам  а выходы каждого из N устройств измерения классификационного параметра по эхо-сигналам
а выходы каждого из N устройств измерения классификационного параметра по эхо-сигналам  соединены с входом блока определения классификационного параметра по совокупности измерений на f1, f2…fN многочастотного эхо-сигнала.
соединены с входом блока определения классификационного параметра по совокупности измерений на f1, f2…fN многочастотного эхо-сигнала.
| АКТИВНЫЙ ГИДРОЛОКАТОР С КЛАССИФИКАЦИЕЙ ОБЪЕКТА | 2013 |
|
RU2528114C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2528113C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2545326C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2553730C1 |
| Способ обработки псевдошумового сигнала в гидролокации | 2020 |
|
RU2739478C1 |
| Активный гидролокатор | 2019 |
|
RU2719214C1 |
| US 20060193206 A1, 31.08.2006. | |||

