Изобретение относится к радиотехнике и может быть использовано в радиотехнических и радиолокационных системах измерения параметров траекторий летательных аппаратов и других системах аналогичного назначения, в которых информация о непосредственно измеряемых координатах (дальности, угловых положениях) формируется с помощью соответствующих дискриминаторов.
Известен следящий измеритель - калмановский фильтр для сопровождения маневрирующей цели [1, Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей: Пер. с англ. - М.: Радио и связь, 1993, стр.225, рис.4.16].
Известны также следящий измеритель с корректируемым фильтром [2, Патент РФ №2156477, 07.06.1999], двухдиапазонный следящий измеритель [3, Патент РФ №2181899, 03.04.2000], следящий измеритель с обнаружителем маневра [4, Патент РФ №2253131, 14.01.2004], следящий измеритель с обнаружителем маневра и адаптивной коррекцией прогноза [5, Патент РФ №2296348, 11.04.2005], основу которых составляют α-β фильтры, обнаружители маневра, построенные на основе пороговых устройств, коммутаторы и цепи коррекции значений оценок координат и их производных.
Недостатком всех вышеуказанных известных устройств является представление дискриминаторов в виде вычитающих устройств с неограниченным рабочим участком дискриминаторной характеристики. Реально же рабочий линейный участок статической характеристики дискриминатора ограничен, что при интенсивном изменении закона движения объекта сопровождения приводит к выходу ошибок слежения (невязок) на нелинейную часть дискриминаторной характеристики и, как следствие, к срыву слежения.
Наиболее близким к предлагаемому решению по технической сущности и достигаемому эффекту является следящий измеритель [6, Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981. стр.257, рис.16.9].
Следящий измеритель содержит последовательно соединенные дискриминатор, первый масштабирующий блок, первый сумматор, блок задержки, экстраполятор, соединенный выходом с вторым входом первого сумматора, а через второй масштабирующий блок - с вторым входом дискриминатора, первый вход которого является входом устройства.
Недостатком этого устройства является отсутствие учета реальных размеров статической характеристики дискриминатора в составе следящего измерителя, приводящее также к срыву сопровождения объекта при выходе ошибок слежения за пределы линейного участка дискриминаторной характеристики, что происходит при интенсивном априорно неопределенном изменении закона движения летательного аппарата, когда этот закон существенно отличается от прогноза, заложенного в экстраполяторе следящего измерителя.
Техническим результатом заявляемого технического решения является расширение области динамической устойчивости устройства за счет оперативной коррекции сигнала отрицательной обратной связи без изменения вида и размеров статической характеристики дискриминатора следящего измерителя координат летательного аппарата.
Это достигается тем, что следящий измеритель, содержащий дискриминатор, первый вход которого является входом устройства, последовательно соединенные первый масштабирующий блок, первый сумматор, первый блок задержки, экстраполятор и второй масштабирующий блок, вход которого соединен с вторым входом первого сумматора, на третий вход которого поступают начальные значения параметров движения объекта слежения, отличается тем, что в него дополнительно введены второй сумматор, соединенный первым входом с выходом второго масштабирующего блока, а выходом - с вторым входом дискриминатора, также релейный блок и последовательно соединенные первый блок деления, третий сумматор, блок усреднения, второй блок деления, блок умножения, второй блок задержки, выход которого соединен со вторыми входами второго и третьего сумматоров, второй вход блока умножения подключен к выходу релейного блока, вход которого соединен с выходом блока усреднения, выход дискриминатора подключен к входу первого блока деления, выход третьего сумматора соединен со входом первого масштабирующего блока.
Сущность заявляемого устройства поясняется чертежами.
На фиг.1 представлена функциональная схема предлагаемого следящего измерителя;
на фиг.2 - функциональная схема блока усреднения;
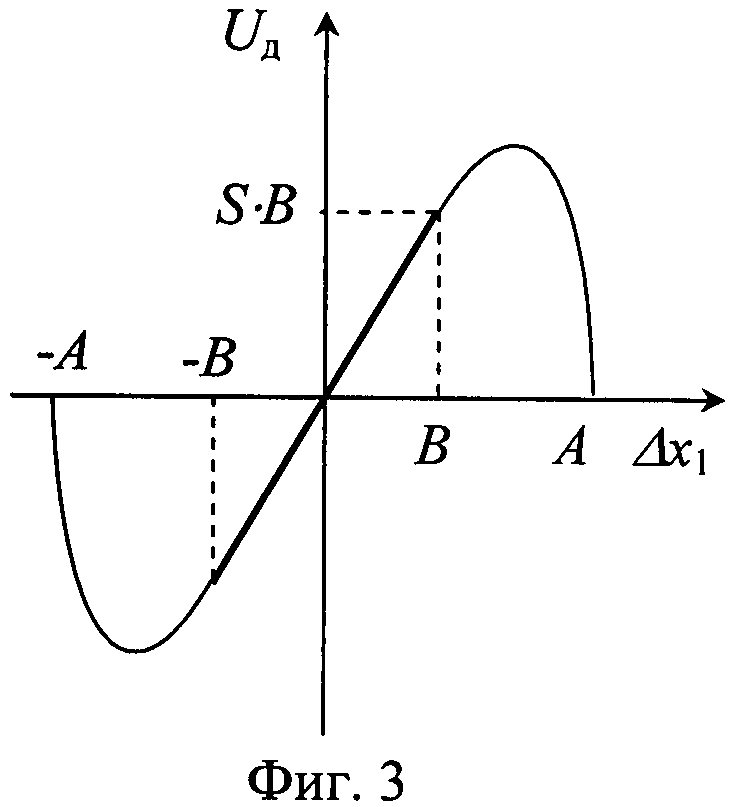
на фиг.3 - статическая характеристика дискриминатора Uд=Uд(Δx1) (обозначения: А - апертура характеристики, В - полуширина линейного участка характеристики, Δx1 - входная измеряемая в дискриминаторе невязка или ошибка слежения, S - крутизна дискриминаторной характеристики);
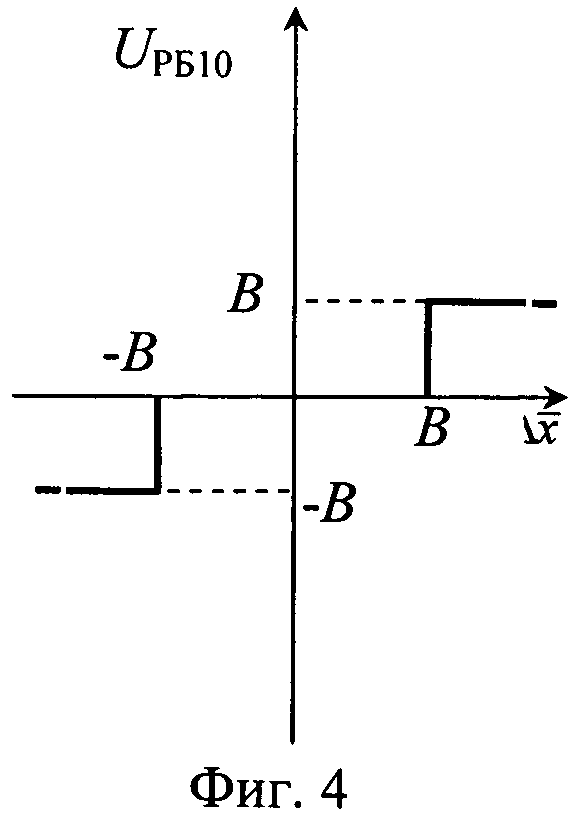
на фиг.4 - статическая характеристика  релейного блока 10 (В - полуширина линейного участка характеристики дискриминатора);
релейного блока 10 (В - полуширина линейного участка характеристики дискриминатора);
на фиг.5 - зависимость сигнала 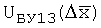 на выходе блока умножения 13 от усредненной невязки
на выходе блока умножения 13 от усредненной невязки  ;
;
на фиг.6, 7 - результаты моделирования работы устройства.
Следящий измеритель (фиг.1) содержит последовательно соединенные дискриминатор 1 и первый блок 2 деления, последовательно соединенные первый масштабирующий блок 3, первый сумматор 4, первый блок 5 задержки, экстраполятор 6, второй масштабирующий блок 7 и второй сумматор 8, подключенный выходом к второму входу дискриминатора 1, вход которого является входом устройства. В состав устройства входит третий сумматор 9, подключенный первым входом к выходу первого блока 2 деления, а выходом - к входу первого масштабирующего блока 3. Также в состав устройства входят релейный блок 10, последовательно соединенные блок 11 усреднения, второй блок 12 деления, блок 13 умножения, второй блок 14 задержки, выход которого соединен с вторыми входами второго и третьего сумматоров 8 и 9 соответственно. Второй вход блока 13 умножения подключен к выходу релейного блока 10, вход которого соединен с выходом блока 11 усреднения, соединенного входом с выходом третьего сумматора 9. Выход экстраполятора 6 соединен также с вторым входом первого сумматора 4, на третий вход которого подаются начальные значения параметров движения сопровождаемого летательного аппарата.
Известная функциональная схема блока 11 усреднения [7, Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Советское радио, 1974, стр.400, рис.4.19] приведена на фиг.2. В состав блока 11 усреднения входят последовательно соединенные первый преобразующий блок 15, четвертый сумматор 16, третий блок 17 задержки, второй преобразующий блок 18, подключенный выходом к второму входу четвертого сумматора 16, выход которого является выходом блока 11 усреднения, вход которого является входом первого преобразующего блока 15.
Следящий измеритель работает следующим образом.
На выходе первого сумматора 4 в дискретные моменты времени n с интервалом дискретизации Т формируются оценки параметров движения сопровождаемого летательного аппарата (далее ЛА) в зависимости от размерности вектора состояния ЛА  (где xi - соответственно координата объекта и ее производные, «т» - символ транспонирования), заложенного в следящем измерителе.
(где xi - соответственно координата объекта и ее производные, «т» - символ транспонирования), заложенного в следящем измерителе.
В начальный момент времени t0 на третий вход первого сумматора 4 подаются начальные значения оценок составляющих вектора  параметров движения сопровождаемого ЛА
параметров движения сопровождаемого ЛА  (где
(где  - соответственно оценки координаты ЛА и ее производных). Указанные значения оценок поступают на вход блока 5 задержки, время задержки которого равно интервалу поступления информации на вход устройства Т. В следующем n-ом такте работы следящего измерителя с выхода блока 5 задержки сигнал поступает на экстраполятор 6, на выходе которого формируются составляющие вектора прогнозируемых параметров движения ЛА
- соответственно оценки координаты ЛА и ее производных). Указанные значения оценок поступают на вход блока 5 задержки, время задержки которого равно интервалу поступления информации на вход устройства Т. В следующем n-ом такте работы следящего измерителя с выхода блока 5 задержки сигнал поступает на экстраполятор 6, на выходе которого формируются составляющие вектора прогнозируемых параметров движения ЛА  , подаваемые на второй масштабирующий блок 7.
, подаваемые на второй масштабирующий блок 7.
Например, если в следящем измерителе оцениваются параметры линейной траектории, то вектор  описывается выражением [7, стр.349]:
описывается выражением [7, стр.349]:

Во втором масштабирующем блоке 7 из всего вектора выделяется только экстраполированная координата ЛА -  , значение которой подается на первый вход второго сумматора 8.
, значение которой подается на первый вход второго сумматора 8.
При работе дискриминатора 1 на линейном участке его статической характеристики (фиг.3), когда модули измеряемых невязок  на входе дискриминатора 1, а соответственно и сформированных в блоке 11 усреднения сглаженных измеренных невязок
на входе дискриминатора 1, а соответственно и сформированных в блоке 11 усреднения сглаженных измеренных невязок  , не превышают полуширину линейного участка дискриминаторной характеристики В, на вторые входы второго и третьего сумматоров 8 и 9 подаются нулевые сигналы. Следовательно, на второй вход дискриминатора 1 поступает сигнал, эквивалентный значению координаты
, не превышают полуширину линейного участка дискриминаторной характеристики В, на вторые входы второго и третьего сумматоров 8 и 9 подаются нулевые сигналы. Следовательно, на второй вход дискриминатора 1 поступает сигнал, эквивалентный значению координаты  . На выходе дискриминатора 1 формируется сигнал
. На выходе дискриминатора 1 формируется сигнал  пропорциональный измеряемой невязке
пропорциональный измеряемой невязке

где S - крутизна дискриминаторной характеристики;

измеренная координата сопровождаемого ЛА, представляемая аддитивной смесью истинной координаты х(n) и ошибки измерений f(n), на практике принятой распределенной по нормальному закону с нулевым математическим ожиданием mf=0 и дисперсией Df(n).
В первом блоке 2 деления производится нормировка выходного сигнала дискриминатора (коэффициент передачи первого блока 2 деления равен 1/5), следовательно, на выходе этого блока формируется сигнал, соответствующий измеренной невязке  , который при работе устройства на линейном участке дискриминаторной характеристики (Δx≈Δx1) передается на выход третьего сумматора 9 и поступает на входы блока 11 усреднения и первого масштабирующего блока 3. На выходе первого масштабирующего блока 3 формируются приращения αΔx(n), (β/T)Δx(n), … где α, β/T, … - соответствующие весовые коэффициенты передачи первого масштабирующего блока 3 по координате, скорости и т.д., в зависимости от размерности прогнозируемого вектора состояния ЛА, заложенного в следящем измерителе. Данные коэффициенты соответствуют элементам весовой матрицы K=[α, β/T, …]T, реализуемой в сглаживающем фильтре следящего измерителя [7, стр.351, 354].
, который при работе устройства на линейном участке дискриминаторной характеристики (Δx≈Δx1) передается на выход третьего сумматора 9 и поступает на входы блока 11 усреднения и первого масштабирующего блока 3. На выходе первого масштабирующего блока 3 формируются приращения αΔx(n), (β/T)Δx(n), … где α, β/T, … - соответствующие весовые коэффициенты передачи первого масштабирующего блока 3 по координате, скорости и т.д., в зависимости от размерности прогнозируемого вектора состояния ЛА, заложенного в следящем измерителе. Данные коэффициенты соответствуют элементам весовой матрицы K=[α, β/T, …]T, реализуемой в сглаживающем фильтре следящего измерителя [7, стр.351, 354].
Таким образом, на выходе первого сумматора 4 формируются сигналы оценок составляющих вектора состояния ЛА (координаты  скорости
скорости  ) то есть
) то есть

В блоке 11 усреднения формируется сигнал  , пропорциональный среднему значению невязки mΔx(n).
, пропорциональный среднему значению невязки mΔx(n).
Выходной сигнал  блока 11 усреднения подается на входы второго блока 12 деления, коэффициент передачи которого равен 1/В, и релейного блока 10, статическая характеристика которого имеет вид «полярного реле с зоной нечувствительности» и приведена на фиг.4. Модули порога срабатывания реле и соответствующего уровня выходного сигнала равны полуширине линейного участка характеристики дискриминатора В.
блока 11 усреднения подается на входы второго блока 12 деления, коэффициент передачи которого равен 1/В, и релейного блока 10, статическая характеристика которого имеет вид «полярного реле с зоной нечувствительности» и приведена на фиг.4. Модули порога срабатывания реле и соответствующего уровня выходного сигнала равны полуширине линейного участка характеристики дискриминатора В.
Сигналы с выходов релейного блока 10 и второго блока 12 деления перемножаются в блоке 13 умножения, выходной сигнал которого через второй блок 14 задержки с временем задержки, равным периоду дискретизации Т (как и для первого блока 5 задержки), подается на вторые входы второго и третьего сумматоров 8 и 9 соответственно.
Если выходной сигнал блока 11 усреднения не превышает величины В, то на выходе релейного блока 10, а соответственно и блока 13 умножения, формируется нулевой сигнал, и в следующем такте работы следящего измерителя на вторые входы второго и третьего сумматоров 8 и 9 подаются сигналы нулевых уровней.
Если закон движения ЛА по измеряемой координате начнет существенно отличаться от модели динамики ЛА, заложенной в экстраполяторе, то динамическая составляющая измеряемой невязки Δx1 начнет увеличиваться, измеренная невязка Δx, а соответственно и сигнал на выходе блока 11 усреднения превышает порог В, и в следующем такте работы устройства на выходе второго блока 14 задержки формируется сигнал, пропорциональный значению , величина сигнала отрицательной обратной связи с выхода второго масштабирующего блока 7 корректируется посредством второго сумматора 8 в сторону уменьшения измеряемой в дискриминаторе невязки

Следовательно, измеряемая невязка Δx1 снова попадает на линейный участок дискриминаторной характеристики, в выходные сигналы дискриминатора 1 и первого блока 2 деления не вносится ее паразитная нелинейная составляющая. Так как на второй вход третьего сумматора 9 подается сигнал то на его выходе формируется сигнал измеренной невязки

Таким образом, в предлагаемом следящем измерителе даже при превышении измеряемой невязкой  линейного участка дискриминаторной характеристики в измеренной невязке
линейного участка дискриминаторной характеристики в измеренной невязке  нет составляющей, обусловленной нелинейностью дискриминатора. На фиг.5 приведена обобщенная статическая характеристика
нет составляющей, обусловленной нелинейностью дискриминатора. На фиг.5 приведена обобщенная статическая характеристика  - зависимость сигнала на выходе блока 13 умножения от сигнала с выхода блока 11 усреднения (жирные линии), формируемая совокупным соединением релейного блока 10, второго блока 12 деления и блока 13 умножения.
- зависимость сигнала на выходе блока 13 умножения от сигнала с выхода блока 11 усреднения (жирные линии), формируемая совокупным соединением релейного блока 10, второго блока 12 деления и блока 13 умножения.
Сигнал  в блоке 11 усреднения определяется по известному выражению экспоненциального сглаживания [7, стр.400]:
в блоке 11 усреднения определяется по известному выражению экспоненциального сглаживания [7, стр.400]:

где ψ - задаваемый весовой коэффициент. Сигнал измеренной невязки Δx(n) через первый преобразующий блок 15 с коэффициентом передачи  подается на первый вход четвертого сумматора 16, на второй вход которого через второй преобразующий блок 18 с коэффициентом передачи ψ поступает сигнал
подается на первый вход четвертого сумматора 16, на второй вход которого через второй преобразующий блок 18 с коэффициентом передачи ψ поступает сигнал  , т.е. задержанный на один такт работы следящего измерителя (на интервал дискретизации 7) в третьем блоке 17 задержки сигнал
, т.е. задержанный на один такт работы следящего измерителя (на интервал дискретизации 7) в третьем блоке 17 задержки сигнал  с выхода четвертого сумматора 16. Этот сигнал
с выхода четвертого сумматора 16. Этот сигнал  и является выходным сигналом блока 11 усреднения.
и является выходным сигналом блока 11 усреднения.
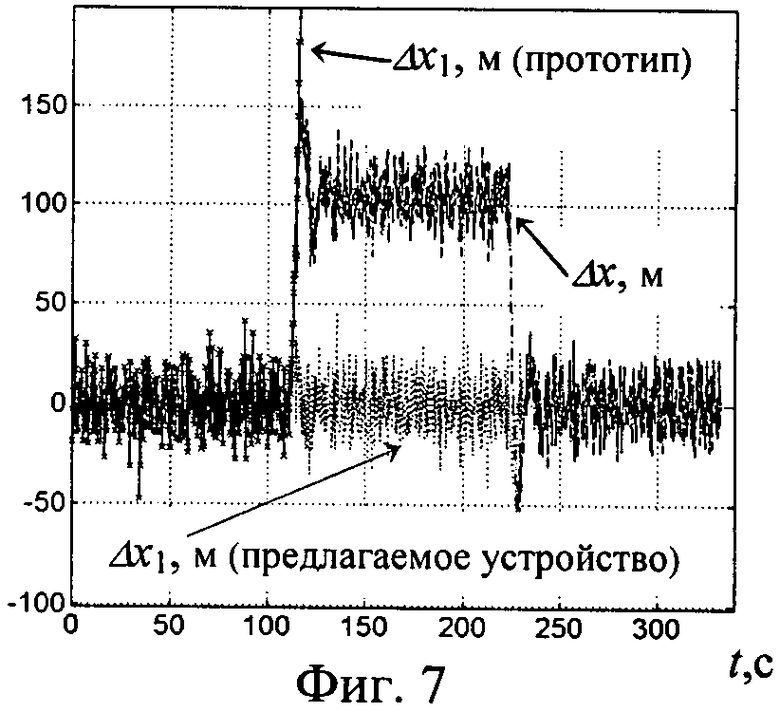
Для подтверждения достижения технического результата заявляемого технического решения было проведено моделирование работы прототипа и предлагаемого устройства в качестве следящих измерителей дальности до ЛА при условиях t0=0, x(t0)=200 км,  ,
,  , при 0≤t≤111c и 222c≤t≤333с,
, при 0≤t≤111c и 222c≤t≤333с,  м/с при 111<t<222c (фиг.6), период дискретизации задавался как T=0.167 c, ошибки измерений f(n), распределенные по нормальному закону N(0, 100 м2), формировались с помощью датчика случайных чисел randn.
м/с при 111<t<222c (фиг.6), период дискретизации задавался как T=0.167 c, ошибки измерений f(n), распределенные по нормальному закону N(0, 100 м2), формировались с помощью датчика случайных чисел randn.
Характеристика дискриминатора 1 при моделировании описывалась однопериодным синусоидальным законом [8, Первачев С.В. Радиоавтоматика. - М.: Радио и связь, 1982, стр.149]:

где π=3,1415926; Am и А - максимальное значение и апертура дискриминаторной характеристики соответственно. Параметры дискриминатора 1 в выражении (8) задавались A=200 м, Am=200 ед./м (крутизна линейного участка дискриминаторной характеристики составила 3 ед./м). Полуширина линейного участка дискриминаторной характеристики принималась равной А/6. Коэффициенты сглаживающего фильтра для первого масштабирующего блока 3 принимались равными α=0.05 и β=0.008. Величина коэффициента ψ в блоке 11 усреднения задавалась равной 0.7.
На фиг.7 приведены графики изменения измеряемой  и измеренной Δx(n) ошибок слежения. При этом в прототипе наблюдается срыв слежения, а в заявляемом устройстве практически отсутствует динамическая ошибка слежения ·, но в то же время в измереной ошибке слежения ·Δx(n) динамическая составляющая присутствует, что необходимо для правильной работы сглаживающего фильтра следящего измерителя.
и измеренной Δx(n) ошибок слежения. При этом в прототипе наблюдается срыв слежения, а в заявляемом устройстве практически отсутствует динамическая ошибка слежения ·, но в то же время в измереной ошибке слежения ·Δx(n) динамическая составляющая присутствует, что необходимо для правильной работы сглаживающего фильтра следящего измерителя.
Величина динамической составляющей ошибки слежения в установившемся режиме определяется как  [7, с.390]. При описанных условиях на участке действия ускорения εД=30×0.1672/0.008=104 м, что подтверждается графиком Δx(n). Следовательно, заявляемое устройство позволяет достичь технического результата, заключающегося в расширении области динамической устойчивости следящего измерителя, при этом в измеренную ошибку слежения Δx(n) не вносится нелинейных искажений, обусловленных нелинейностью дискриминаторной характеристики.
[7, с.390]. При описанных условиях на участке действия ускорения εД=30×0.1672/0.008=104 м, что подтверждается графиком Δx(n). Следовательно, заявляемое устройство позволяет достичь технического результата, заключающегося в расширении области динамической устойчивости следящего измерителя, при этом в измеренную ошибку слежения Δx(n) не вносится нелинейных искажений, обусловленных нелинейностью дискриминаторной характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 2010 |
|
RU2444038C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| ЦИФРОВОЙ ВРЕМЕННОЙ ДИСКРИМИНАТОР | 2011 |
|
RU2445728C1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |


Предлагаемый следящий измеритель может быть использован в радиотехнических и радиолокационных системах измерения параметров траекторий летательных аппаратов и других системах аналогичного назначения, в которых информация о непосредственно измеряемых координатах (дальности, угловых положениях) формируется с помощью соответствующих дискриминаторов. Достигаемый технический результат изобретения - расширение области динамической устойчивости устройства за счет оперативной коррекции сигнала отрицательной обратной связи без изменения вида и размеров статической характеристики дискриминатора следящего измерителя координат летательного аппарата. Указанный результат достигается за счет того, что следящий измеритель содержит дискриминатор, два масштабирующих блока, три сумматора, два блока задержки, экстраполятор, релейный блок, два блока деления, блок усреднения, блок умножения, соединенные между собой определенным образом. 7 ил.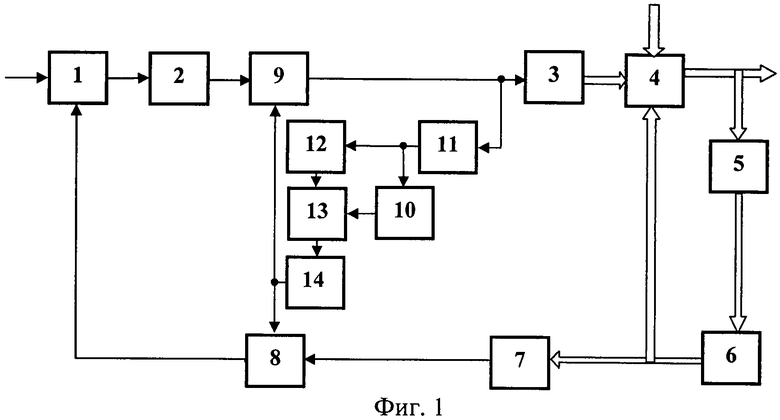
Следящий измеритель, содержащий дискриминатор, первый вход которого является входом устройства, последовательно соединенные первый масштабирующий блок, первый сумматор, первый блок задержки, экстраполятор и второй масштабирующий блок, вход которого соединен с вторым входом первого сумматора, выход которого является выходом устройства, на третий вход первого сумматора подаются начальные значения параметров движения объекта слежения, отличающийся тем, что в него дополнительно введены второй сумматор, соединенный первым входом с выходом второго масштабирующего блока, а выходом - с вторым входом дискриминатора, также релейный блок и последовательно соединенные первый блок деления, третий сумматор, блок усреднения, второй блок деления, блок умножения, второй блок задержки, выход которого соединен с вторыми входами второго и третьего сумматоров, второй вход блока умножения подключен к выходу релейного блока, вход которого соединен с выходом блока усреднения, выход дискриминатора подключен к входу первого блока деления, выход третьего сумматора соединен с входом первого масштабирующего блока, при этом коэффициент передачи первого блока деления равен обратной величине крутизны дискриминационной характеристики, а коэффициент передачи второго блока деления - обратной величине полуширины ее линейного участка.
| ШИРМАН Я.Д., МАНЖОС В.Н | |||
| Теория и техника обработки радиолокационной информации на фоне помех | |||
| - М.: Радио и связь, 1981, с.257, рис.16.9 | |||
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| УСТРОЙСТВО ОЦЕНКИ ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2005 |
|
RU2304790C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ СКОРОСТИ СБЛИЖЕНИЯ | 1995 |
|
RU2087007C1 |
| US 7515091 B, 07.04.2009 | |||
| JP 1895901 C, 23.01.1995 | |||
| GB 1376702 A, 11.12.1974 | |||
| Приспособление для предохранения от поломки иголок в круглых вязальных машинах, | 1928 |
|
SU12735A1 |

