Изобретение относится к области радиотехники и может быть использовано для определения местоположения наземного источника излучения по результатам его двухмерного пеленгования с борта летательного аппарата.
Известен способ многократной пеленгации наземной цели, в соответствии с которым на летательном аппарате пеленгуют цель по её радиоизлучению с измерением угла прихода радиоволн в горизонтальной плоскости, одновременно измеряют координаты точек полёта, по совокупности всех за время полёта измерений путём их обработки, исходя из обеспечения минимальной погрешности, определяют координаты источника на плоскости.
Обработку результатов измерений выполняют по методу наименьших квадратов углов до линий пеленгов, при этом определяют координаты опорной точки, как точки пересечения любой пары пеленгов, угол между которыми лежит в диапазоне от 30 до 120 град, затем пеленг на опорную точку и расстояние от неё до каждого пункта пеленгования, после чего уточняют координаты по полученным результатам посредством алгебраических преобразований [Мельников Ю.П. Воздушная радиотехническая разведка (методы оценки эффективности). – М.: Радиотехника, 2005, с.148-158].
Известен вариант обработки результатов измерений методом максимального правдоподобия, при этом координаты определяют по минимуму суммы квадратов разностей между измеренными и расчётными до мест возможного положения источника пеленгами с определением положения минимума численными методами [Рабцун А.В. Оценка максимального правдоподобия координат источников сигналов при многопозиционном пеленговании. «Радиотехника», 1987, №9, с. 9-10].
Под линией пеленга понимается прямая линия, проходящая через пункт пеленгования и источник радиоизлучения.
Данный способ не обеспечивает определение координат источника излучения по результатам однократного пеленгования, на линии базы пеленгования и вблизи неё при прямолинейном полёте, высоты места излучения, недостатком является также низкая точность местоопределения по причине применения угловых измерений только в одной горизонтальной плоскости.
Известен способ определения координат наземного источника радиоизлучения при радиопеленговании с борта летательного аппарата, включающий периодическое пеленгование источника в азимутальной плоскости бортового пеленгатора, формирование ортогональной ей в направлении пеленга вспомогательной плоскости в нормальной земной системе координат с учётом пространственного положения летательного аппарата, затем определение линий положения источника, как линий пересечения независимых пар вспомогательных плоскостей, попарное позиционирование источника, как точек пересечения линий положения с поверхностью Земли и определение местоположения источника путём весовой обработки результатов попарного позиционирования. Точки пересечения определяют с использованием итерационной процедуры их поиска, причём шаг сходимости выбирают зависящим от изрезанности поверхности Земли в зоне радиопеленгования [RU, №2610150, G01S 1/08, G01S 5/02, опубл. 08.02.2017].
Недостатками способа является необходимость измерений пеленгов не менее двух раз, существенные затраты на выполнение итерационных процедур, низкая точность определения координат по причинам применения угловых измерений только в одной горизонтальной плоскости и не строгих, вне заданных критериев точности, эмпирических решений, не гарантирующих положительного эффекта за пределами узких границ. Не обеспечивается определение координат на линии базы пеленгования и вблизи неё при прямолинейном полёте.
Из известных наиболее близким к предлагаемому по технической сущности является способ определения местоположения наземной цели, включающий двухмерное пеленгование источника с помощью пеленгатора, расположенного на летательном аппарате, синхронно с этим измерение собственных пространственных координат летательного аппарата и определение координат источника путём обработки совокупности всех за время полёта результатов измерения-пеленгования исходя из обеспечения минимальной погрешности [Уфаев В.А. Определение местоположения наземных целей по результатам двухмерного пеленгования с лётно-подъёмных средств //Антенны. 2015. Вып. 5(216). С.58-61].
Определение координат источника выполняют методом наименьших квадратов взвешенных расстояний до линий двухмерных пеленгов по формулам для абсциссы и ординаты соответственно
где 




Известен вариант определения координат методом максимального правдоподобия как положения минимума суммы квадратов разностей между измеренными и расчётными до мест возможного положения источника составляющими векторов двухмерных пеленгов, при этом положение минимума определяют численными методами, а расчётные составляющие находят по формулам 
где 

Недостатками данного способа являются низкая точность определения координат в холмистой местности, вследствие исходного допущения о нахождении источника на плоской земной поверхности без учёта рельефа, отсутствие определения высоты места излучения.
Техническим результатом настоящего изобретения является определение высоты места излучения и повышение точности определения координат источника на горизонтальной координатной плоскости.
Указанный технический результат, достигается тем, что в известном способе определения местоположения наземного источника радиоизлучения, включающем двухмерное пеленгование источника с помощью пеленгатора, расположенного на летательном аппарате, синхронно с этим измерение собственных пространственных координат летательного аппарата и определение по ним и результатам пеленгования за всё время полёта координат источника в горизонтальной координатной плоскости исходя из обеспечения минимальной погрешности, согласно изобретению, до начала пеленгования определяют высоту местности в местах возможного положения источника, координаты источника определяют дополнительно с учётом этой высоты, дополнительно определяют высоту места излучения, как высоту местности в точке полученных координат источника.
Указанный технический результат, достигается также тем, что координаты источника определяют методом наименьших квадратов взвешенных расстояний от источника на заданной высоте до линий двухмерных пеленгов, при этом первоначально оценивают координаты источника при высоте места излучения равной средней высоте рельефа местности в рабочей зоне, после чего уточняют высоту по полученным координатам, координаты при уточнённой высоте и высоту по уточнённым координатам, причём абсциссу и ординату источника определяют по формулам соответственно
где 



Указанный технический результат, достигается также тем, что координаты источника определяют методом максимального правдоподобия как положение минимума суммы квадратов разностей между измеренными и расчётными до мест возможного положения источника составляющими векторов двухмерных пеленгов, при этом положение минимума определяют численными методами, а расчётные составляющие определяют по формулам

где 

Решение технической задачи основано на учёте рельефа местности, высоты мест возможного положения источника как функции его координат на горизонтальной координатной плоскости и введении учитывающих эту информацию корректировок в операции способа-прототипа. Необходимые данные о рельефе местности содержатся в цифровых картах, например, геоинформационная система ГИС "Панорама" обеспечивает построение и использование трехмерных моделей земной поверхности [ГЕОИНФОРМАЦИОННАЯ СИСТЕМА «ПАНОРАМА X64» (ГИС Панорама). Построение 3D модели. ПАРБ.00227-019807. http://gistoolkit.ru/download/doc/model3d.pdf].
Существо корректировок состоит во введении третьей координаты, высоты места излучения и определение двухмерных пеленгов и расстояний до линии пеленгов с учётом этого фактора.
Видоизменение расчётных формул способа-прототипа при определении координат методом наименьших квадратов состоит в выполнении накоплений дополнительных величин 
Неопределённость высоты преодолевается последовательным её уточнением при первоначальном задаваемом значении равном средней высоте рельефа местности, когда достигаются минимальные в среднем погрешности первичного определения координат.
Парадоксальность такого решения состоит в том, что с помощью операций (формул) рассчитанных на известную высоту цели, достигается требуемый эффект при неопределённости высоты.
Объясняется это тем, что учёт информации о высоте, относительно принятого в прототипе принципа: высота одинакова и равна нулю, позволяет точнее рассчитывать, как двухмерные пеленги, так и удаление от линий измеренных пеленгов, и как следствие, достичь технического результата: обеспечить определение высоты места излучения источника и повысить точность определения его координат.
Указанные преимущества, а также особенности настоящего изобретения поясняются прилагаемыми фигурами.
На фиг.1 представлена структурная схема информационно-измерительной системы для реализации заявленного способа;
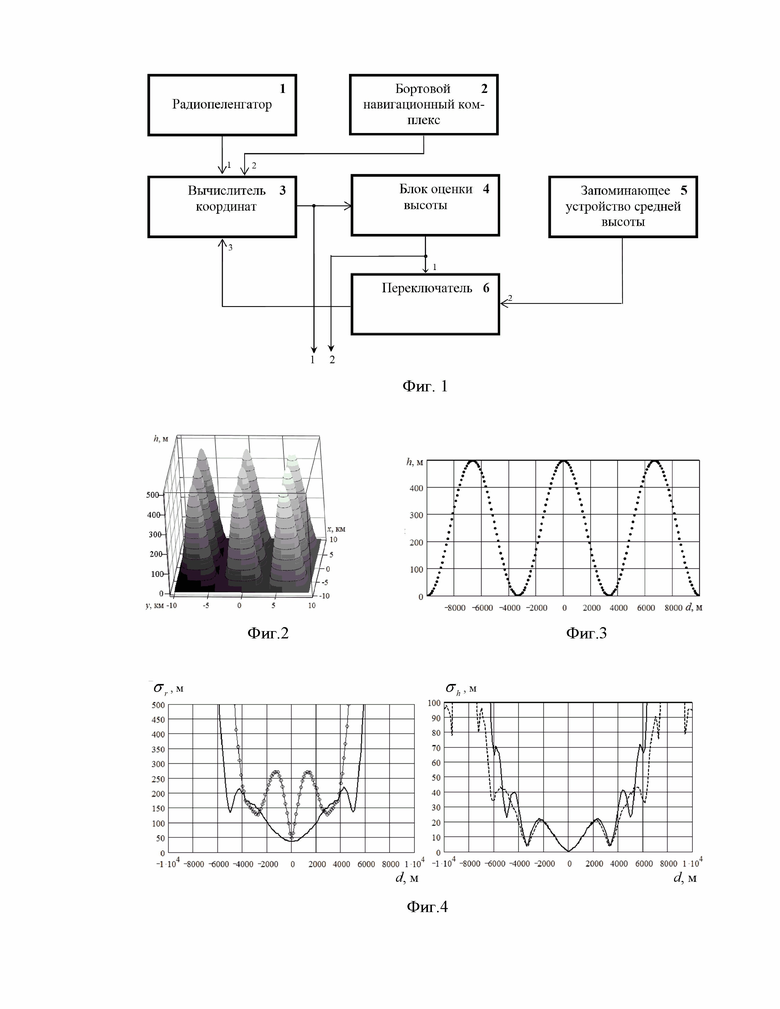
на фиг.2 – рельеф местности по оси ординат;
на фиг.3 – сечение рельефа местности в рабочей зоне;
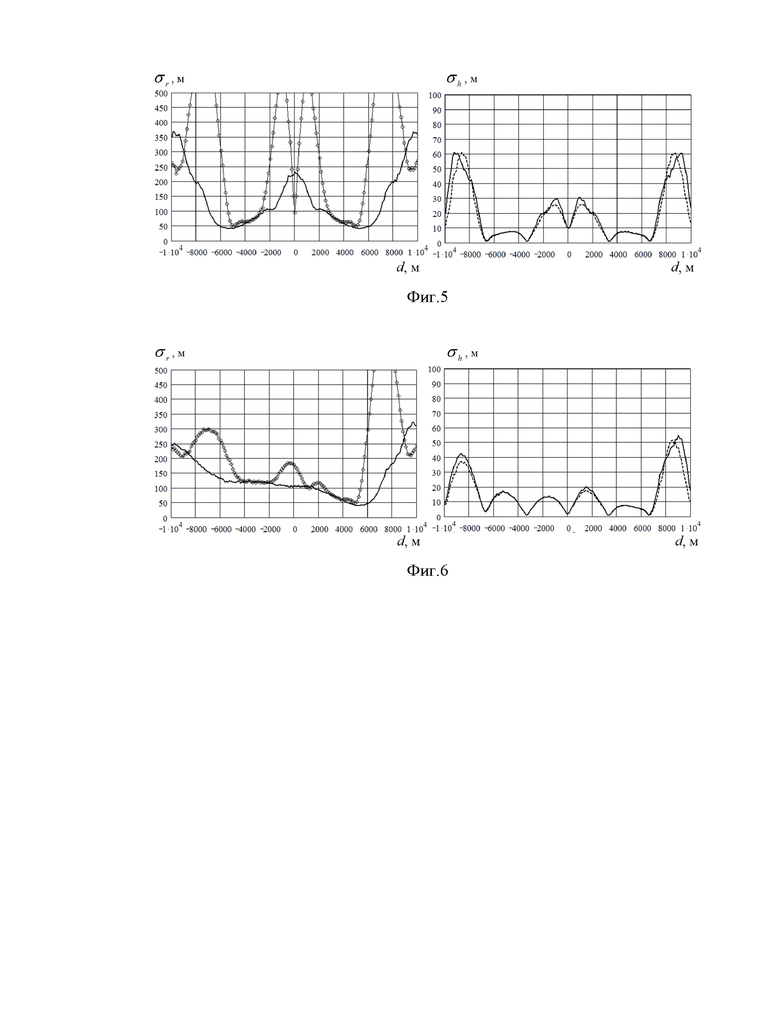
на фиг.4 – зависимости средних квадратических погрешностей определения координат от дальности системы из одного пункта пеленгования, слева – в горизонтальной плоскости, справа по высоте;
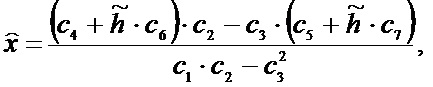
на фиг.5 – зависимости средних квадратических погрешностей определения координат от дальности системы из двух пунктов пеленгования, слева – в горизонтальной плоскости, справа по высоте;
на фиг.6 – зависимости средних квадратических погрешностей определения координат от дальности системы из трёх пунктов пеленгования, слева – в горизонтальной плоскости, справа по высоте.
Информационно-измерительная система фиг.1 содержит 1 – радиопеленгатор, 2 – бортовой навигационный комплекс, 3 – вычислитель координат, 4 –блок оценки высоты, 5 – запоминающее устройство (ЗУ) средней высоты, 6 – переключатель. Выход радиопеленгатора 1 и бортового навигационного комплекса 2, подключен соответственно к первому и второму входу вычислителя координат 3, третий вход которого соединён с выходом переключателя 6, первый вход которого подключен к выходу блока оценки высоты 4, а второй – к выходу запоминающего устройства средней высоты 5. Выход вычислителя координат 3 подключен к входу блока оценки высоты 4 и является первым выходом информационно-измерительной системы, вторым выходом которой является выход блока оценки высоты 4.
Радиопеленгатор 1 обеспечивает периодическое двухмерное пеленгование с представлением результатов в виде составляющих вектора пеленга по координатным осям. Под вектором пеленга понимается единичный вектор, направленный из места положения летательного аппарата на источник. Измерение составляющих вектора пеленга обеспечивается, например фазовым способом с помощью объёмной антенной решётки [Уфаев В.А. Определение местоположения наземных целей по результатам двухмерного пеленгования с лётно-подъёмных средств //Антенны. 2015. Вып. 5(216). С.58-61] или способами амплитудного двухмерного пеленгования [Козьмин В.А., Уфаев В.А., Уфаев А.В. Способы амплитудного двухмерного пеленгования //Антенны. 2017. Вып. 6(238). С.38-44].
В бортовом навигационном комплексе 2 синхронно с пеленгованием измеряют собственные пространственные координаты летательного аппарата, в горизонтальной плоскости и по высоте. Центр системы координат совмещают с центром рабочей зоны на нулевом уровне высоты. Измерения выполняют известными способами и устройствами [Системы управления и бортовые цифровые вычислительные комплексы летательных аппаратов. Под ред. Н.М. Лысенко. М.: ВВИА им. проф. Н.Е. Жуковского, 1990, с. 244-259].
Вычислитель координат 3 предназначен для определения координат источника в горизонтальной плоскости по результатам всех за время полёта измерений пеленгов вход 1, собственных пространственных координат летательного аппарата, вход 2 и информации о высоте места возможного положения источника, вход 3.
Блок оценки высоты 4 обеспечивает определение высоты мест возможного положения источника исходя из его координат на горизонтальной координатной плоскости. Может быть выполнен на основе запоминающего устройства, в которое предварительно заносят информацию о рельефе местности с заданным шагом квантования координат или непосредственно в виде функционального преобразователя с реализацией функции рельефа местности по результатам предварительного преобразования цифровой картографической информации.
В запоминающее устройство 5 заносят значение средней высоты местности в рабочей зоне информационно-измерительной системы.
Переключатель 6 обеспечивает подачу на свой выход информации или с блока оценки высоты 4 или с запоминающего устройства 5.
Функционирование информационно-измерительной системы и процесс определения местоположения наземного источника радиоизлучения происходит следующим образом.
Предварительно до начала полёта определяют высоту местности в местах возможного положения источника как функцию рельефа местности в виде зависимости 


В ходе полёта с помощью бортового навигационного комплекса 2 периодически измеряют собственные пространственные координаты летательного аппарата: ординату 


Синхронно с этим с помощью радиопеленгатора 1 выполняют двухмерное пеленгование с представлением результатов в виде составляющих вектора пеленга по координатным осям.
Истинные значения составляющих по ординате, абсциссе и аппликате определяются взаимным положением летательного аппарата и источника излучения
Измерения, отметим их скобкой сверху 
Определение координат источника выполняют по результатам измерений двухмерных пеленгов и собственных координат летательного аппарата с учётом рельефа (высоты) местности исходя из обеспечения минимальной погрешности. Данную операцию осуществляют в вычислителе координат 3.
В соответствии с общим определением расстояния от точки до прямой в пространстве [Бронштейн И.Н., Семендяев К.А. Справочник по математике. –М.: Наука, 1986, с. 205], расстояния до линии измеренного двухмерного пеленга в координатных плоскостях равны



где
Учитывая определение (2), по методу наименьших квадратов взвешенных расстояний от источника на заданной высоте до линий двухмерных пеленгов неизвестную абсциссу и ординату места положения источника определяют по формулам
Исходные в операции (3) величины получают путём функционального преобразования измерений и суммирования результатов по формулам
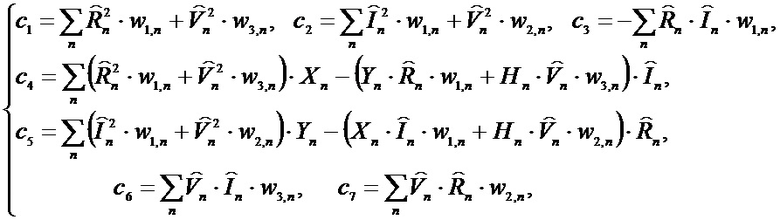
где
Весовые коэффициенты обратно пропорциональны оценочной дисперсии расстояний (2) до линии пеленга.
Определение исходных в формулах (3) величин 

Поскольку изначально высота места излучения неизвестна обработку выполняют поэтапно.
Первоначально оценивают координаты источника на горизонтальной координатной плоскости по формулам (3) при задании высоты места излучения равной средней высоте рельефа местности рабочей зоны 

Затем уточнённое значение высоты используют как задаваемую высоту места излучения и повторным преобразованием по формулам (3) уточняют горизонтальные координаты излучателя, которые выдают на выход 1 информационно-измерительной системы. Затем по ним в блоке оценки 4 по формуле (5) уточняют высоту места излучения с выдачей результата по выходу 2 системы.
Координаты источника методом максимального правдоподобия определяют, как положение минимума суммы квадратов разностей между измеренными и расчётными до мест возможного положения источника составляющими векторов двухмерных пеленгов по формуле

В этом случае с блока оценки высоты 4 через коммутатор 6 поступают значения функции рельефа местности
Применение данного варианта обработки целесообразно при относительно слабых ограничениях на аппаратурно-вычислительные ресурсы и необходимости обеспечения минимум миниморум погрешностей определения координат.
Эффективность изобретения выражается в обеспечении определения высоты места излучения и повышении точности определения координат источника.
Количественная оценка точности выполнена моделированием применительно к холмистой местности фиг.2 с высотой холмов до 500 м в рабочей зоне 20·20 км при высоте полёта летательного аппарата 2000 м. Функция рельефа местности задавалась аналитически

Принята высота полёта летательного аппарата 2000 м с пеленгованием в одном пункте 


Оценивались средние квадратичные погрешности определения координат в горизонтальной координатной плоскости 

Моделировалось двухмерное пеленгование с помощью объёмной антенной решётки минимального состава из 4-х антенн [Уфаев В.А. Определение местоположения наземных целей по результатам двухмерного пеленгования с лётно-подъёмных средств //Антенны. 2015. Вып. 5(216). С.58-61] при средней квадратической ошибке пеленгования 1 град. Измерения собственных пространственных координат летательного аппарата полагались точными.
Результаты в виде зависимостей погрешностей определения координат от дальности места положения источника до центра рабочей зоны показаны на фиг.4, 5, 6 соответственно для 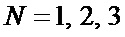
На фиг.4-6 справа, штриховой линией показаны результаты при оценивании координат методом максимального правдоподобия, а сплошной жирной линией – методом наименьших квадратов.
Анализ результатов показывает, что предлагаемый способ относительно способа-прототипа обеспечивает определение высоты места излучения и повышение точности определения горизонтальных координат источника излучения с применением метода наименьших квадратов в среднем в 1,6-2,2 раза. Применение метода максимального правдоподобия в оговоренных условиях позволяет дополнительно повысить точность на 6% -10%.
Заявленный способ определения местоположения наземного источника радиоизлучения применим в системах радиоконтроля, радиотехнической разведки, навигации и посадки летательных аппаратов по приводным передатчикам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ САМОНАВЕДЕНИЯ НА НАЗЕМНУЮ ЦЕЛЬ | 2018 |
|
RU2714531C1 |
| СПОСОБ АМПЛИТУДНОГО ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ | 2018 |
|
RU2686113C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА МОБИЛЬНЫМ ПЕЛЕНГАТОРОМ | 2006 |
|
RU2316784C1 |
| СПОСОБ ДВУХМЕРНОГО ПЕЛЕНГОВАНИЯ ВОЗДУШНОГО ОБЪЕКТА | 2013 |
|
RU2535174C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| СПОСОБ РАДИОКОНТРОЛЯ | 2014 |
|
RU2560098C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПЕРЕДАТЧИКА ПЕРЕНОСНЫМ ПЕЛЕНГАТОРОМ | 2009 |
|
RU2405166C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2292560C1 |
| Угломерно-корреляционный способ определения местоположения наземных источников радиоизлучения | 2021 |
|
RU2764149C1 |
Изобретение относится к области радиотехники и может быть использовано для определения местоположения наземного источника излучения по результатам его двухмерного пеленгования с борта летательного аппарата. Достигаемый технический результат – определение высоты места излучения и повышение точности определения координат источника излучения в холмистой местности в 1,6-2,2 раза. Указанный результат достигается за счет того, что способ определения местоположения наземного источника радиоизлучения включает двухмерное пеленгование источника с помощью пеленгатора, расположенного на летательном аппарате, синхронно с этим измерение собственных пространственных координат летательного аппарата и определение по ним и результатам пеленгования за всё время полёта координат источника в горизонтальной координатной плоскости исходя из обеспечения минимальной погрешности, при этом до начала пеленгования определяют высоту местности в местах возможного положения источника, координаты источника определяют дополнительно с учётом этой высоты, дополнительно определяют высоту места излучения как высоту местности в точке полученных координат источника. Координаты источника определяют методом наименьших квадратов взвешенных расстояний от источника на заданной высоте до линий двухмерных пеленгов, а также методом максимального правдоподобия как положение минимума суммы квадратов разностей между измеренными и расчётными до мест возможного положения источника составляющими векторов двухмерных пеленгов. 2 з.п. ф-лы, 6 ил.
1. Способ определения местоположения наземного источника радиоизлучения, включающий двухмерное пеленгование источника с помощью пеленгатора, расположенного на летательном аппарате, синхронно с этим измерение собственных пространственных координат летательного аппарата и определение по ним и результатам пеленгования за всё время полёта координат источника в горизонтальной координатной плоскости исходя из обеспечения минимальной погрешности, отличающийся тем, что до начала пеленгования определяют высоту местности в местах возможного положения источника, координаты источника определяют дополнительно с учётом этой высоты, дополнительно определяют высоту места излучения как высоту местности в точке полученных координат источника.
2. Способ по п.1, отличающийся тем, что координаты источника определяют методом наименьших квадратов взвешенных расстояний от источника на заданной высоте до линий двухмерных пеленгов, при этом первоначально оценивают координаты источника при высоте места излучения, равной средней высоте рельефа местности в рабочей зоне, после чего уточняют высоту по полученным координатам, координаты при уточнённой высоте и высоту по уточнённым координатам, причём абсциссу и ординату источника определяют по формулам соответственно
где 





3. Способ по п.1, отличающийся тем, что координаты источника определяют методом максимального правдоподобия как положение минимума суммы квадратов разностей между измеренными и расчётными до мест возможного положения источника составляющими векторов двухмерных пеленгов, при этом положение минимума определяют численными методами, а расчётные составляющие определяют по формулам

где 


| УФАЕВ В.А | |||
| Определение местоположения наземных целей по результатам двухмерного пеленгования с летно-подъемных средств //Антенны | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДВУХМЕРНОГО ПЕЛЕНГА | 2005 |
|
RU2288481C2 |
| Способ сухой перегонки дров и отходов лесозаготовок | 1950 |
|
SU106757A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| US 4641143 A, 03.02.1987 | |||
| US 6327314 B1, 04.12.2001 | |||
| US 7579988 B2, 25.08.2009. | |||

