Область техники, к которой относится изобретение
Это изобретение в целом относится к системам и способам для направляемой парковки или параллельной парковки транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Некоторые современные транспортные средства включают в себя системы параллельной парковки, которые направляют водителя на незанятое место для параллельной парковки, применяя различные известные математические алгоритмы. Проблема состоит в том, что системы параллельной парковки могут направлять водителя на место для параллельной парковки, которое (а) препятствует выезду водителя с места передним ходом, (b) препятствует выезду водителя с места задним ходом или (с) препятствует открыванию водителем одной или более дверей, в том числе двери багажника.
Сущность изобретения
В различных вариантах осуществления, настоящее изобретение решает вышеприведенные проблемы с системами парковки и способами парковки.
Система парковки, содержит:
транспортное средство, имеющее акселератор, тормоза, колеса, датчики, дисплей, процессор и память;
программу содействия парковке, хранимую в памяти и выполненную с возможностью:
принимать размеры места для параллельной парковки и транспортного средства,
прогнозировать, на основании принятых размеров, сможет ли транспортное средство:
выехать с места для параллельной парковки с будущим передним препятствием, и
выехать с места для параллельной парковки с будущим задним препятствием.
Система, в которой программа содействия парковке дополнительно выполнена с возможностью:
после парковки, определять, сможет ли дверь багажника транспортного средства полностью открываться, на основании принятых размеров.
Система, в которой программа содействия парковке дополнительно выполнена с возможностью:
прогнозировать серию возможных результатов параллельной парковки на основании принятых размеров и определять, для каждого из возможных результатов параллельной парковки, сможет ли дверь багажника транспортного средства полностью открываться.
Система, в которой программа содействия парковке дополнительно выполнена с возможностью:
прогнозировать серию возможных результатов параллельной парковки на основании принятых размеров и определять, для каждого из возможных результатов параллельной парковки, сможет ли транспортное средство:
выехать в случае будущего переднего препятствия, и
выехать в случае будущего заднего препятствия.
Система, в которой программа содействия парковке дополнительно выполнена с возможностью:
определять, на основании принятых размеров, является ли выезд(ы) беспрепятственным или точно определенным.
Система, в которой программа содействия парковке дополнительно выполнена с возможностью:
побуждать графические данные, основанные на принятых размерах, появляться на дисплее, графические данные указывают:
сможет ли транспортное средство:
выехать с места для параллельной парковки в случае будущего переднего препятствия,
выехать с места для параллельной парковки в случае будущего заднего препятствия, и
полностью открывать дверь багажника транспортного средства.
Система, в которой графические данные указывают, являются ли выезды беспрепятственными или точно определенными.
Система, в которой программа содействия парковке дополнительно выполнена с возможностью:
определять, на основании принятых размеров, находится ли транспортное средство на правомерном расстоянии от выявленных бордюрных камней.
Система в которой программа содействия парковке дополнительно выполнена с возможностью:
автоматически приводить в действие режим въезда на парковку и автоматически приводить в действие режим выезда с парковки, на основании принятых размеров.
Система, дополнительно включающая в себя удаленное устройство на беспроводной связи с транспортным средством, и выполненное с возможностью:
отправлять сигнал, дающий транспортному средству команду довести до максимума пространство для доступа к двери багажника вплоть до предопределенного значения.
Система, в которой программа содействия парковке дополнительно выполнена с возможностью:
побуждать транспортное средство передавать беспроводное сообщение, когда приближающееся транспортное средство вызывает одно из переднего препятствия и заднего препятствия, сообщение включает в себя то, имеется ли в распоряжении новый выезд с парковки, и, если так, является ли следующий выезд с парковки беспрепятственным или точно определенным.
Способ парковки транспортного средства, имеющего акселератор, тормоза, колеса, датчики, дисплей, процессор и память, причем способ состоит в том, что:
с помощью программы содействия парковке, хранимой в памяти:
принимают размеры места для параллельной парковки и транспортного средства,
прогнозируют, на основании принятых размеров, сможет ли транспортное средство:
выехать с места для параллельной парковки с будущим передним препятствием, и
выехать с места для параллельной парковки с будущим задним препятствием.
Способ, дополнительно состоящий в том, что:
прогнозируют серию возможных результатов параллельной парковки, на основании принятых размеров, и определяют, для каждого из возможных результатов параллельной парковки, сможет ли дверь багажника транспортного средства полностью открываться.
Способ, дополнительно состоящий в том, что:
прогнозируют серию возможных результатов параллельной парковки на основании принятых размеров и определяют, для каждого из возможных результатов параллельной парковки, сможет ли транспортное средство:
выехать в случае будущего переднего препятствия, и
выехать в случае будущего заднего препятствия.
Способ, дополнительно состоящий в том, что:
отображают графические данные, основанные на полученных размерах, на дисплее, графические данные указывают:
сможет ли транспортное средство:
выехать с места для параллельной парковки в случае будущего переднего препятствия,
выехать с места для параллельной парковки в случае будущего заднего препятствия, и
полностью открывать дверь багажника транспортного средства.
Способ, в котором графические данные указывают, являются ли выезды беспрепятственными или точно определенными.
Способ, дополнительно состоящий в том, что:
определяют, на основании принятых размеров, находится ли транспортное средство на правомерном расстоянии от выявленных бордюрных камней.
Способ, дополнительно состоящий в том, что:
автоматически приводят в действие режим въезда на парковку и автоматически приводят в действие режим выезда с парковки на основании принятых размеров.
Способ, дополнительно состоящий в том, что:
передают сигнал с удаленного устройства, дающий транспортному средству команду довести до максимума пространство для доступа к двери багажника вплоть до предопределенного значения.
Способ, дополнительно состоящий в том, что:
побуждают транспортное средство передавать беспроводное сообщение, когда приближающееся транспортное средство вызывает одно из переднего препятствия и заднего препятствия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения, может быть сделана ссылка на варианты осуществления, показанные на нижеследующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть опущены или, в некоторых случаях, могли быть преувеличены пропорции, с тем чтобы подчеркнуть и ясно проиллюстрировать обладающие новизной признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые номера ссылок обозначают соответствующие части на всем протяжении нескольких видов.
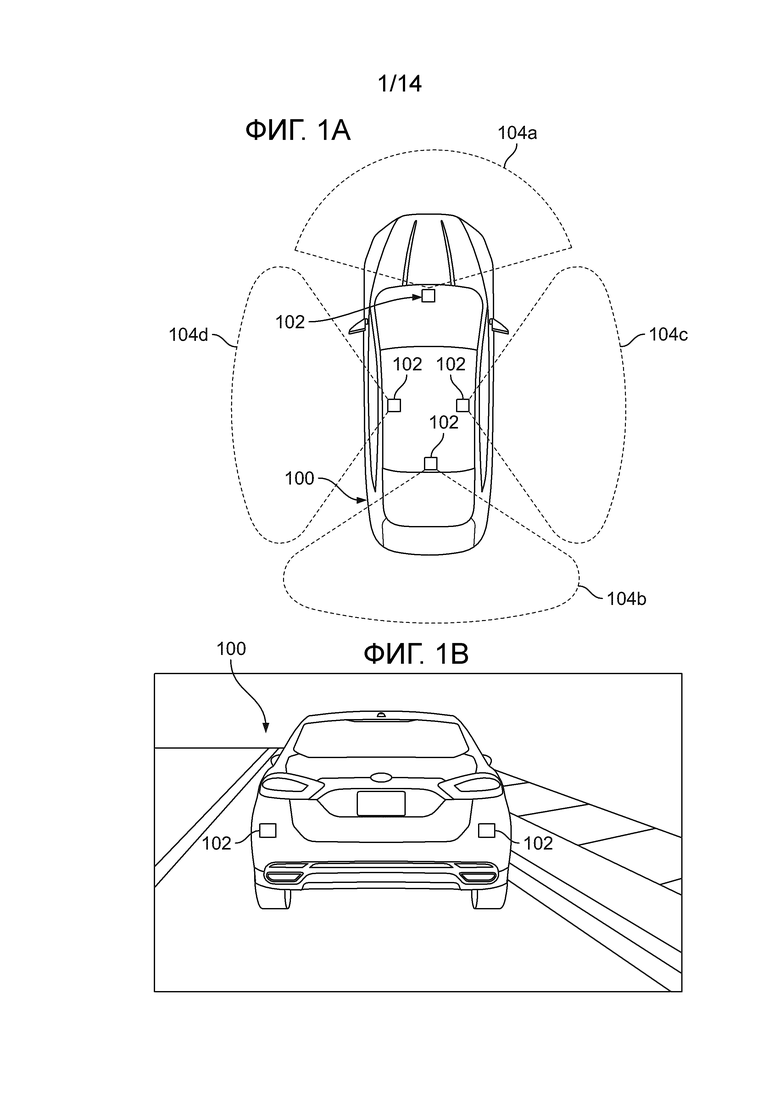
Фиг. 1а - вид сверху примерного транспортного средства.
Фиг. 1b - вид сзади в перспективе примерного транспортного средства.
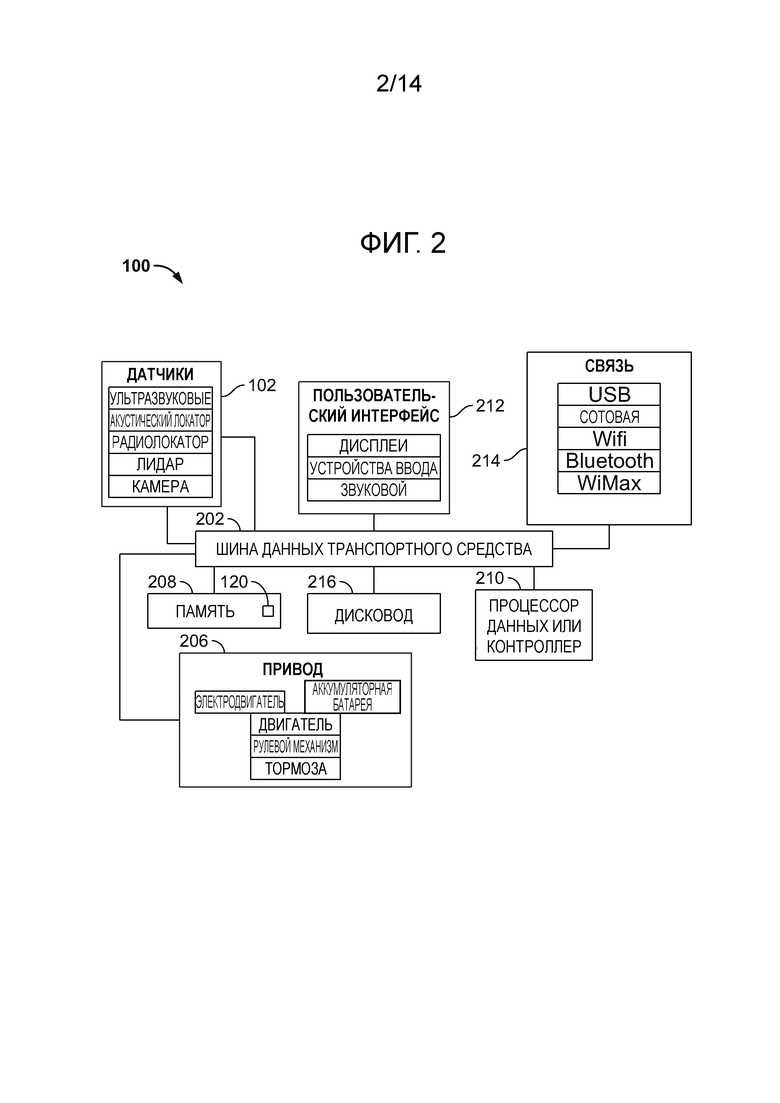
Фиг. 2 - примерная структурная схема электроники, включенной в транспортное средство.
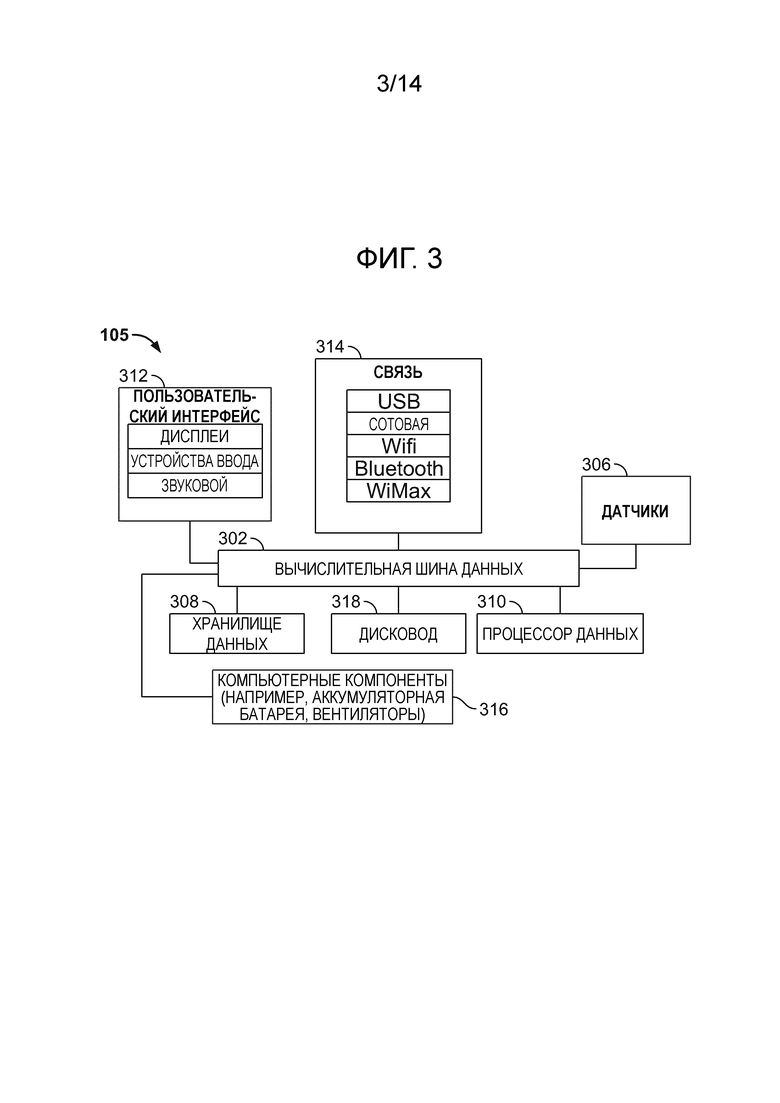
Фиг. 3 - примерная структурная схема электроники, включенной в вычислительное устройство, которое может быть функционально присоединено к электронике транспортного средства по фиг. 2 проводным или беспроводным образом.
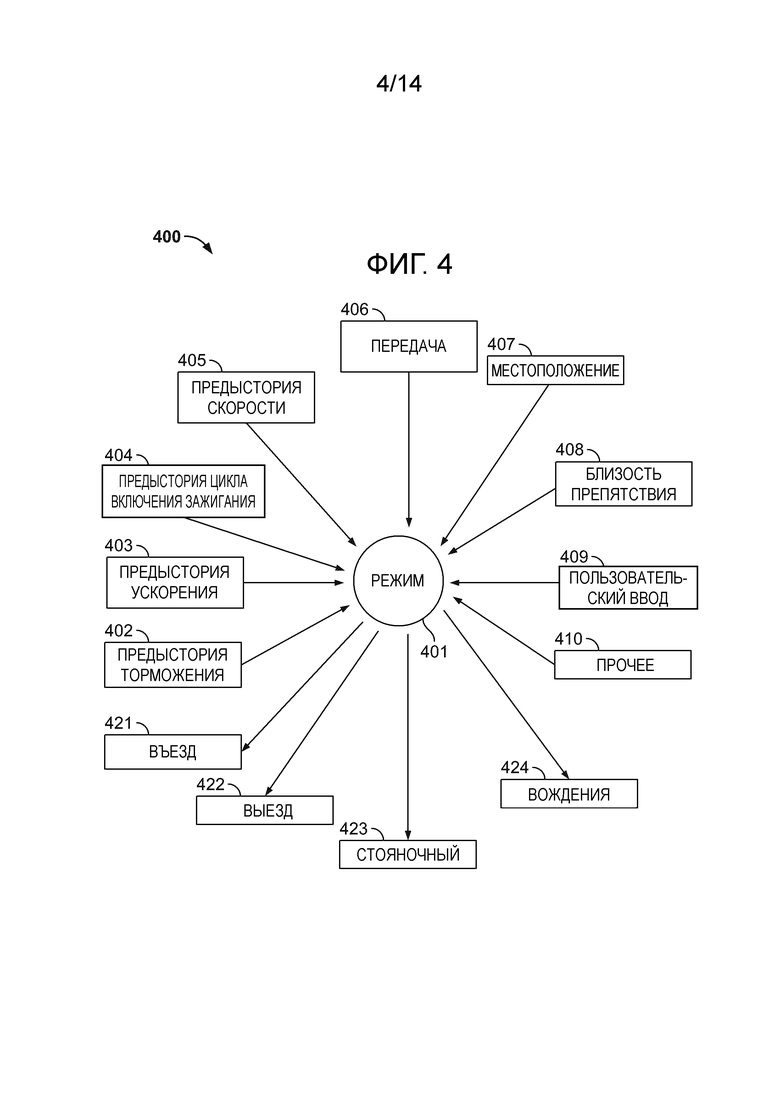
Фиг. 4 иллюстрирует различные примерные факторы, которые программа содействия параллельной парковке может использовать для определения режима работы.
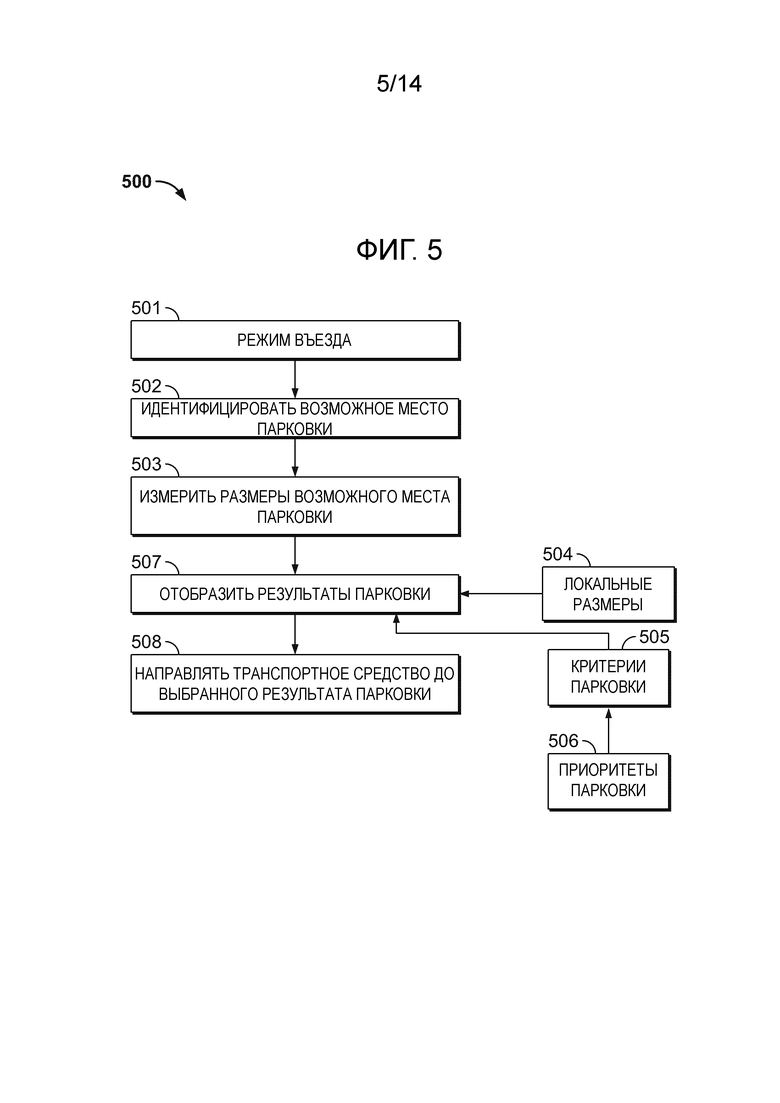
Фиг. 5 - один из примеров подпрограммы въезда.
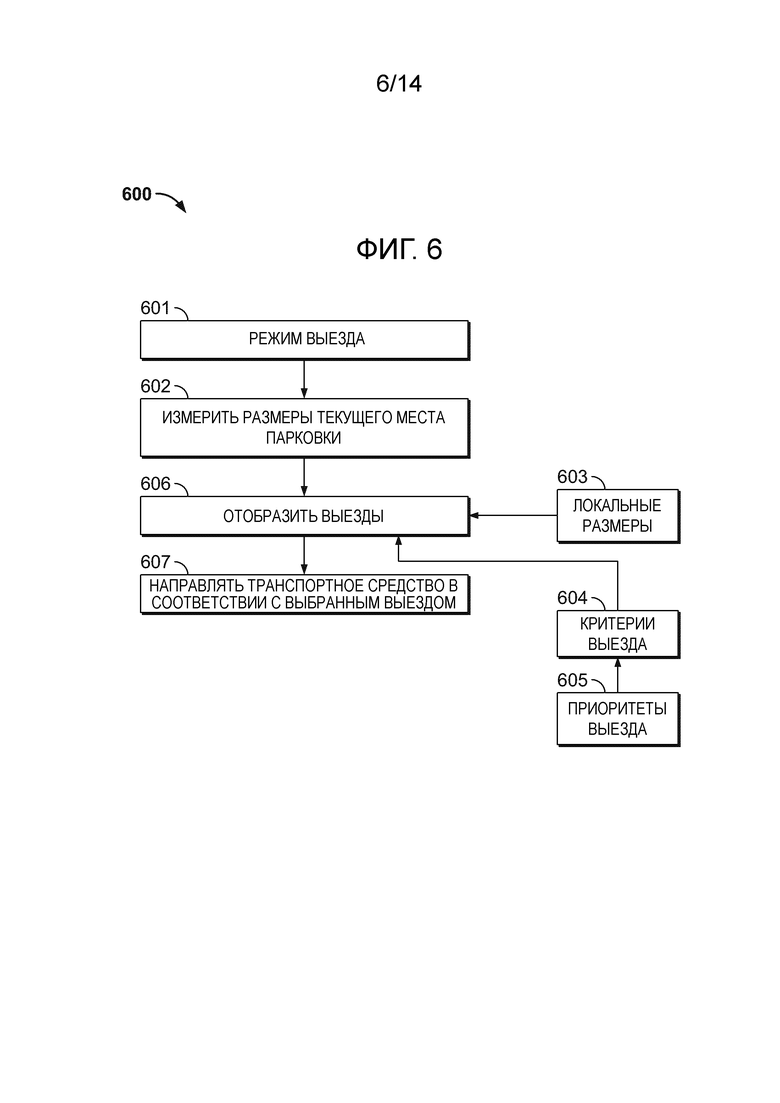
Фиг. 6 - один из примеров подпрограммы выезда.
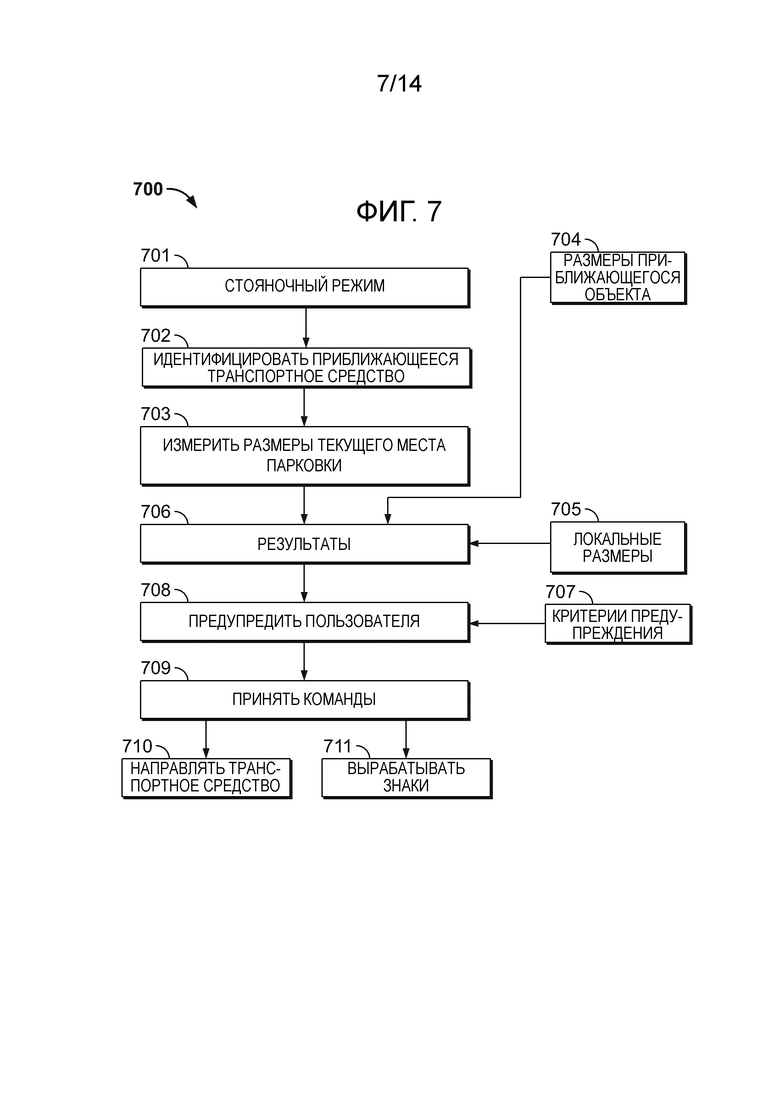
Фиг. 7 - один из примеров стояночной подпрограммы.
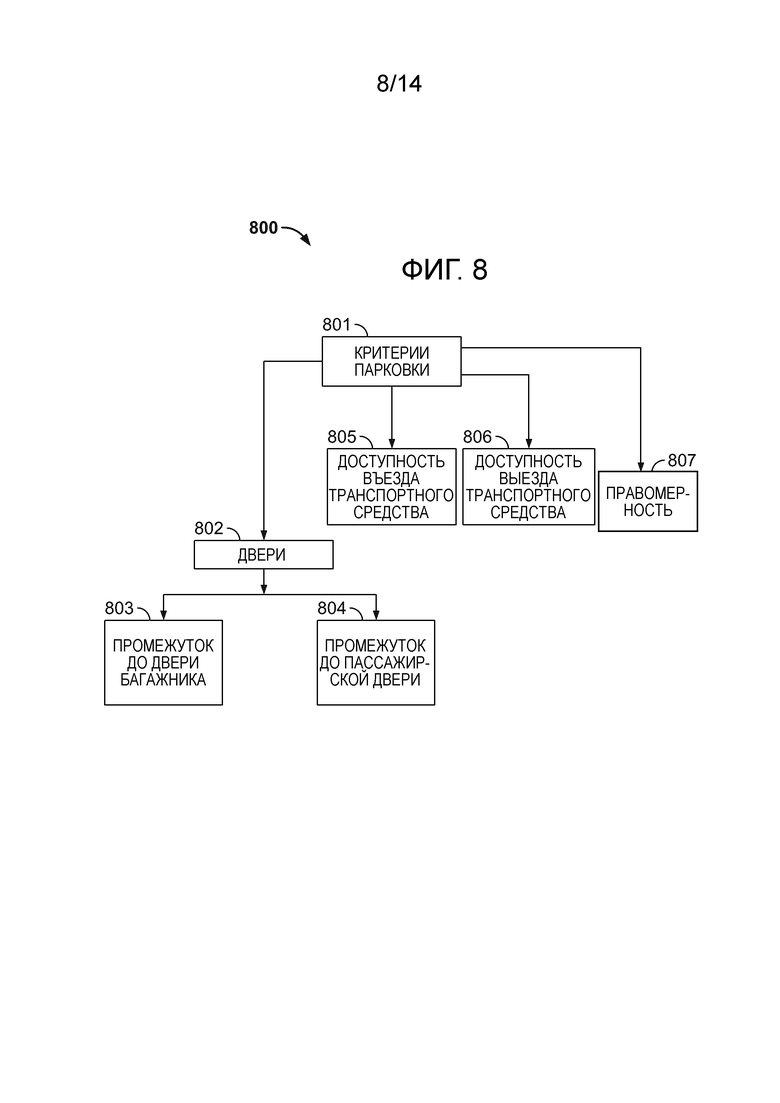
Фиг. 8 иллюстрирует различные примерные тематические разделы, которые программа содействия параллельной парковке может представлять пользователю.
Фиг. с 9а по 9d и с 10а по 10c иллюстрируют различные примерные сценарии парковки.
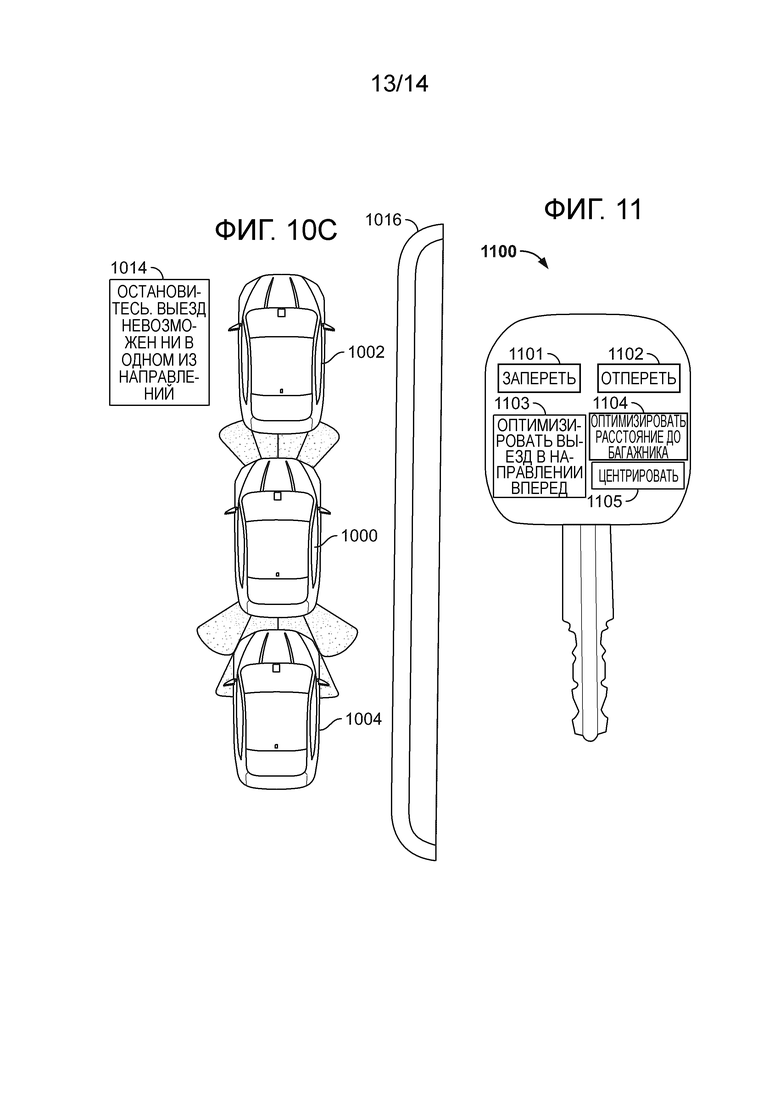
Фиг. 11 - примерный ключ для использования с программой содействия параллельной парковке.
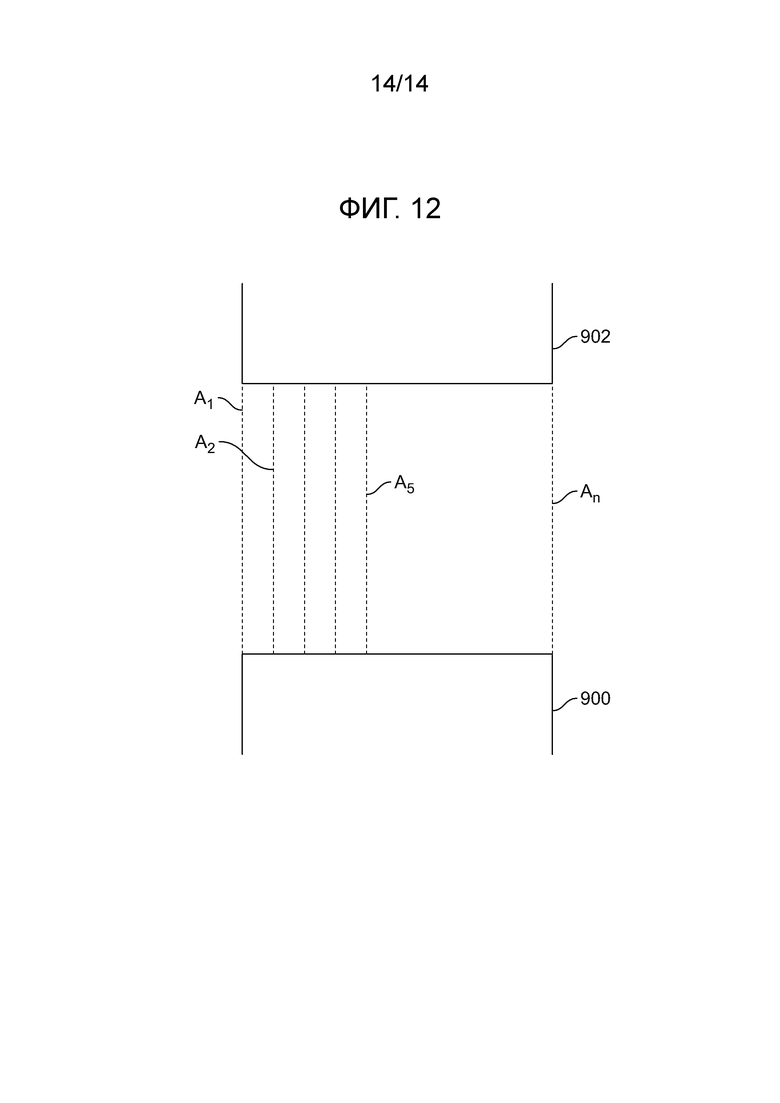
Фиг. 12 иллюстрирует примерный процесс измерения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Несмотря на то, что изобретение может быть воплощено в различных формах, на чертежах показаны и будут описаны в дальнейшем некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
В этой заявке подразумевается, что использование дизъюнктивных суждений должно включать в себя конъюнктивное суждение. Использование определенных или неопределенных артиклей не подразумевается указывающим мощность множества. В частности, подразумевается, что ссылка на определенный объект или неопределенный объект также должна обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, вместо взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать включающим в себя «и/или».
Примерные аппаратные средства
Фиг. 1a показывает транспортное средство 100 в соответствии с одним из вариантов осуществления. Транспортное средство 100 может быть обычным транспортным средством с бензиновым силовым приводом, транспортным средством с гибридным приводом, транспортным средством с электрическим приводом, транспортным средством на топливных элементах или любым другим типом пригодного транспортного средства. Транспортное средство 100 включает в себя обычные признаки (не показаны), такие как приборный щиток, регулируемые сиденья, одна или более аккумуляторных батарей, двигатель или электродвигатель, трансмиссия, система HVAC, включающая в себя компрессор и электронный расширительный клапан, ветровое стекло, двери, окна, ремни безопасности, подушки безопасности и шины. В различных вариантах осуществления, транспортное средство 100 по фиг. 1a является автомобилем с кузовом седан или SUV. В различных вариантах осуществления, SUV включает в себя дверь багажника, которая шарнирно поворачивается вокруг крыши SUV, как в целом показано на фиг. 9е со ссылкой на транспортное средство 900.
Настоящее изобретение описывает некоторые события в транспортном средстве с общей ссылкой на транспортное средство с бензиновым силовым приводом. Следует принимать во внимание, что подобное изобретение применяется к другому транспортному средству (например, транспортному средству с электрическим приводом), даже если другое транспортное средство не имеет точной соответствующей части. Например, некоторые электромобили не имеют передач. Следует принимать во внимание, что изобретение, связанное с признаками переключения передач, может быть реализовано в транспортном средстве с электрическим приводом в отношении числа оборотов электродвигателя в минуту, скорости транспортного средства или направления движения транспортного средства (то есть, прямого или обратного).
Транспортное средство 100 может включать в себя датчики 102. Датчики 102 могут быть размещены в, по и на автомобиле (то есть, размещены локально) соответствующим образом. Датчики могут быть все одинаковыми или разными. Может быть много датчиков, как показано на фиг. 1b, или только один датчик. Датчики могут включать в себя камеру, ультразвуковые датчики, акустический локатор, лазерный локатор (лидар), радиолокатор, оптический датчик или инфракрасное устройство, выполненные с возможностью измерять свойства вокруг наружной стороны транспортного средства, как указано пунктирными линиями со 104a по 104d на фиг. 1a. Некоторые датчики 102 могут быть установлены внутри пассажирского отделения транспортного средства 100, на внешней или наружной стороне транспортного средства или в моторном отсеке транспортного средства 100. По меньшей мере один датчик 102 может использоваться для идентификации водителя транспортного средства с помощью распознавания лиц, распознавания речи или связи с устройством, таким как ключ транспортного средства или мобильный телефон, индивидуальные для водителя. Датчики могут иметь выключенное (OFF) состояние и различные включенные (ON) состояния. Транспортное средство 100 или устройство, функционально присоединенное к транспортному средству, может быть выполнено с возможностью управлять состояниями или действиями датчиков.
В различных вариантах осуществления, процессор выполнен с возможностью преобразовывать сигналы (цифровые или аналоговые), которые формируют датчики, в размерные данные. Такие операции известны в данной области техники. Например, публикация в США под № 2014/0105464, которая настоящим включена в состав посредством ссылки во всей своей полноте, раскрывает процессор транспортного средства, выполненный с возможностью находить размеры места для парковки с использованием информации, отправляемой локальными датчиками с лазерным локатором. Публикация в США под № 2010/0283633, которая настоящим включена в состав посредством ссылки во всей своей полноте, раскрывает процессор транспортного средства, выполненный с возможностью формировать карту на виде сверху места для парковки с помощью локальных камер. Патент США под № 7,176,789, который настоящим включен в состав посредством ссылки во всей своей полноте, раскрывает способ для измерения расстояния с помощью ультразвуковых датчиков. Патент США под № 7,492,282, который настоящим включен в состав посредством ссылки во всей своей полноте, раскрывает способ и устройство для нахождения размеров места для парковки с помощью ультразвуковых датчиков.
Как показано на фиг. 2, в одном из вариантов осуществления, транспортное средство 100 включает в себя шину 202 данных транспортного средства, функционально связанную с датчиками 102, устройствами 206 привода транспортного средства, памятью или хранилищем 208 данных, процессором или контроллером 210, пользовательским интерфейсом 212, устройствами 214 связи и дисководом 216.
Процессор или контроллер 210 может быть любым пригодным устройством обработки или набором устройств обработки, таким как, но не в качестве ограничения: микропроцессор, основанная на микроконтроллерах платформа, пригодная интегральная схема или одна или более специализированных интегральных схем (ASIC).
Память 208 может быть энергозависимой памятью (например, ОЗУ (оперативным запоминающим устройством, RAM), которое может включать в себя энергонезависимое ОЗУ, магнитное ОЗУ, ферроэлектрическое ОЗУ, и любые другие пригодные формы); энергонезависимой памятью (например, дисковой памятью, флэш-памятью (FLASH), СППЗУ (стираемым программируемым постоянным запоминающим устройством, EPROM), ЭСППЗУ (электрически стираемым программируемым постоянным запоминающим устройством, EEPROM), основанной на мемристорах энергонезависимой твердотельной памятью, и т. д.); неизменной памятью (например, СППЗУ); постоянным запоминающим устройством (ПЗУ); накопителем на жестком диске; твердотельным накопителем; или физическим диском, таким как DVD. В варианте осуществления, память включает в себя многочисленные разновидности памяти, в частности, энергозависимую память и энергозависимую память.
Устройства 214 связи могут включать в себя проводной или беспроводной сетевой интерфейс, включающий в себя сотовую антенну, чтобы давать возможность связи с внешней сетью. Внешняя сеть может быть совокупностью одной или более сетей, в том числе, основанных на стандартах сетей (например, 2G, 3G, 4G, Системы автономной услуги парковки с Универсальной системой мобильных телекоммуникаций (UMTS), Ассоциации GSM (R), долгосрочного развития (LTE) (TM) или дополнительных); сетей WiMAX; Bluetooth; связи через поле в ближней зоне (NFC); WiFi (в том числе, 802.11 a/b/g/n/ac или других); WiGig; сетей глобальной системы определения местоположения (GPS); и других имеющихся в распоряжении на момент подачи этой заявки, или которые могут быть разработаны в будущем. Кроме того, внешняя сеть(и) может быть сетью общего пользования, такой как сеть Интернет; частной сетью, такой как интранет (локальная сеть, использующая технологии Интернет); или их комбинация, и может использовать многообразие сетевых протоколов, имеющихся в распоряжении в настоящее время или разработанных позже, в том числе, но не в качестве ограничения, основанные на TCP/IP сетевые протоколы. Устройства 214 связи также могут включать в себя проводной или беспроводный интерфейс, чтобы давать возможность непосредственной связи с электронным устройством, такой как интерфейс USB или Bluetooth. Пригодная сеть также может включать в себя сеть непосредственно между транспортными средствами.
Пользовательский интерфейс 212 может включать в себя любые пригодные устройства ввода и вывода. Устройства ввода дают водителю или пассажиру транспортного средства возможность вводить модификации или обновления в информацию, к которой обращаются различные программы, как описано в материалах настоящей заявки. Устройства ввода, например, могут включать в себя ручку управления, приборную панель, кнопочную панель, сканер, цифровую камеру для захвата изображений и/или визуального распознавания команд, сенсорный экран, устройство звукового ввода (например, микрофон в кабине), кнопки, мышь или сенсорную площадку. Устройства вывода могут включать в себя средства вывода комбинации приборов (например, круговые шкалы, осветительные устройства), исполнительные механизмы, дисплей (например, жидкокристаллический дисплей («LCD»), органический светоизлучающий диод («OLED»), плоскопанельный дисплей, твердотельный дисплей, электронно-лучевая трубка («CRT») или проекционный дисплей на лобовом стекле) и громкоговорители.
Дисковод 216 выполнен с возможностью принимать машинно-читаемый носитель. В некоторых вариантах осуществления, дисковод 216 принимает машинно-читаемый носитель, на котором могут быть воплощены один или более наборов команд, таких как программное обеспечение для приведения в действие способов по настоящему изобретению. Команды 926 могут воплощать один или более способов или логику, как описанные в материалах настоящей заявки. В конкретном варианте осуществления, команды могут находиться полностью или по меньшей мере частично в пределах любых одной или более из основной памяти 208, машинно-читаемого носителя и/или в пределах процессора 210 во время выполнения команд.
Следует понимать, что термин «машинно-читаемый носитель» включает в себя одиночный носитель или множественные носители, такие как централизованная или распределенная база данных и/или связанные кэш-память и серверы, которые хранят один или более наборов команд. Термин «машинно-читаемый носитель» также включает в себя любой материальный носитель, который способен к хранению, кодированию или несению набора команд для выполнения процессором, или который побуждает систему выполнять любой один или более из способов или операций, раскрытых в материалах настоящей заявки.
В одном из вариантов осуществления, программное обеспечение или программа(ы) 120 для парковки находятся в памяти 208 транспортного средства. Программа 120 парковки может отправлять и принимать данные на и из датчиков 102, пользовательского интерфейса 212, устройств 214 связи, привода 206 или любого другого компонента, функционально присоединенного к шине 202 данных транспортного средства.
В одном из вариантов осуществления, вычислительное устройство 105, такое как мобильный телефон, функционально соединено с транспортным средством 100 с помощью любого пригодного информационного соединения, такого как WiFi, Bluetooth, USB или сотовое информационное соединение. Следует понимать, что термин «функционально соединен» не требует непосредственного соединения и включает в себя соединение через сеть Интернет.
В одном из вариантов осуществления, показанном на фиг. 3, вычислительное устройство 105 включает в себя шину 302 данных, функционально присоединенную к датчикам 306, компонентам 316, памяти или хранилищу 308 данных, процессору или контроллеру 310, пользовательскому интерфейсу 312 и устройствам 314 связи. Следует принимать во внимание, что электронные признаки вычислительного устройства 105 могут быть аналогичны признакам транспортного средства 100, как описанные выше. Например, устройства 314 связи вычислительного устройства 105 могут действовать аналогично устройствам 214 связи транспортного средства 100. То же самое применяется к пользовательскому интерфейсу 312, датчикам 306, хранилищу 308 данных, процессору 310 и дисководу 318.
Следует принимать во внимание, что любая программа, описанная в материалах настоящей заявки, может храниться и выполняться на транспортном средстве 100 или вычислительном устройстве 105 (таком как мобильный телефон). В различных вариантах осуществления, программа 120 парковки, находящаяся в памяти транспортного средства, включает в себя одну или более подпрограмм, как обсуждено ниже. В некоторых вариантах осуществления, подпрограммы являются фактически отдельными и готовыми программами, выполненными с возможностью обмениваться информацией по мере надобности.
Следует принимать во внимание, что это описание изобретения как правило указывает ссылкой транспортное средство, содержащее программу 120 парковки, как «текущее» транспортное средство. Текущее транспортное средство имеет «локальные» датчики и размеры. Термины «пользователь» и «водитель» используются взаимозаменяемо и как правило относятся к человеку, управляющему текущим транспортным средством.
Примерные программы
Со ссылкой на фиг. 4, программа 120 парковки по настоящему изобретению может работать в одном из четырех различных режимов: режиме 421 въезда, режиме 422 выезда, стояночном режиме 423 и режиме 424 вождения. Режим вождения является действующим, когда водитель управляет транспортным средством, а также не ищет парковку и не вовлечен в процесс парковки. Режим въезда является действующим, когда водитель ищет парковку или находится в процессе въезда на место для парковки. Стояночный режим является действующим, когда транспортное средство припарковано, и водитель намеревается поддерживать транспортное средство в припаркованном состоянии. Режим выезда является действующим, когда водитель намеревается покинуть место для парковки. Следует принимать во внимание, что, в зависимости от считанных или принятых измерений, режим выезда может быть действующим, в то время как автомобиль припаркован.
Намерение водителя влияет на режимы, приведенные выше. Программа 120 парковки по настоящему изобретению может предсказывать намерение водителя с помощью подпрограммы 400 режима. Подпрограмма режима может принимать одни или более из следующих входных данных: предыстории 402 торможения, предыстории 403 ускорения, предыстории 404 цикла включения зажигания, предыстории 405 скорости, текущего положения избирателя 406 механизма переключения передач, местоположения 407, близости 408 преграды, пользовательского ввода 409 и других входных данных 410. Подпрограмма режима выбирает режим после оценки одного или более входных сигналов с помощью предопределенного алгоритма.
Согласно одному из примерных алгоритмов, подпрограмма режима вводит в действие режим 421 въезда в ответ на одно или более из: нахождения транспортного средства в пределах предопределенного местоположения (такого как отмеченная зона парковки или в пределах предопределенного расстояния от пункта назначения), нахождения транспортного средства в конкретной полосе движения (такой как полоса движения, ближайшая к месту для парковки), наличия у транспортного средства предыстории по меньшей мере одного события ускорения и одного события торможения за текущий цикл включения зажигания, нахождения транспортного средства на передаче движения передним ходом и без превышения предопределенной скорости в течение предопределенного времени. Подпрограмма режима может поддерживать режим 421 въезда действующим до тех пор, пока водитель не ставит транспортное средство на стоянку, или водитель не отъезжает на достаточное расстояние от места для парковки. В качестве еще одного примера, подпрограмма режима может включать режим въезда, когда транспортное средство останавливается по меньшей мере на предопределенное время в пределах предопределенного расстояния от незанятого места для парковки.
Согласно одному из примерных алгоритмов, подпрограмма режима вводит в действие стояночный режим 423 в ответ на одно или более из: нахождения передачи в положении стоянки, запирания дверей или нахождения ключа вне гнезда замка зажигания транспортного средства (или зоны действия датчика, если ключ является беспроводным).
Согласно одному из примерных алгоритмов, подпрограмма режима вводит в действие режим 422 выезда в ответ на одно или более из: переключения водителем с передачи в положении стоянки на передачу переднего хода или заднего хода, отпирания и попадания водителя в автомобиль, включения водителем зажигания. Подпрограмма режима может поддерживать режим выезда до тех пор, пока транспортное средство полностью не миновало неподвижно стоящие преграды и не въехало в полосу движения транспорта.
Согласно одному из примерных алгоритмов, подпрограмма режима переходит в режим 424 вождения. Подпрограмма режима также может вводить в действие режим вождения в ответ на одно или более из: включения водителем определенной передачи (такой как вторая передача), превышения водителем определенной скорости, или попадания водителя в определенную полосу движения.
В качестве альтернативы или в дополнение к вышеприведенным алгоритмам, подпрограмма режима может вводить в действие один из режимов в ответ на команду пользователя, такую как нажатие кнопки или речевую команду. В различных вариантах осуществления, подпрограмма режима предупреждает водителя перед вводом в действие нового режима.
Фиг. 5 в целом показывает и иллюстрирует примерную подпрограмму 500 въезда. Подпрограмма въезда может загружаться и выполняться в ответ на ввод в действие режима въезда подпрограммой 400 режима на 501. Подпрограмма въезда может использовать локальные датчики транспортного средства для идентификации возможного места для парковки на 502. Подпрограмма въезда может идентифицировать преграды, окружающие возможное место для парковки, чтобы вычислять или оценивать размеры места для парковки. В различных вариантах осуществления, размеры являются двухмерными и находятся в плоскости, в целом параллельной улице. В других вариантах осуществления, размеры являются трехмерными и включают в себя оценку вертикального пространства (например, оценивая, загромождает ли ветвь дерева некоторую часть вертикального пространства). Как обсуждено ранее, технологии нанесения на карту и идентификации преград с помощью локальных датчиков транспортного средства известны в данной области техники.
Подпрограмма въезда измеряет или принимает локальные размеры транспортного средства на 504, которые могут включать в себя: локальные радиусы поворота транспортного средства для выезда как вперед, так и задним ходом, геометрию открывания двери багажника, геометрию открывания двери, коэффициенты запаса, движение транспорта, пользовательские предпочтения и другие входные данные. Следует принимать во внимание, что локальные размеры транспортного средства могут быть предварительно запрограммированы в памяти транспортного средства, или могут загружаться с внешнего сервера. Кроме того, следует принимать во внимание, что локальные размеры транспортного средства могут динамически рассчитываться с помощью локальных датчиков транспортного средства.
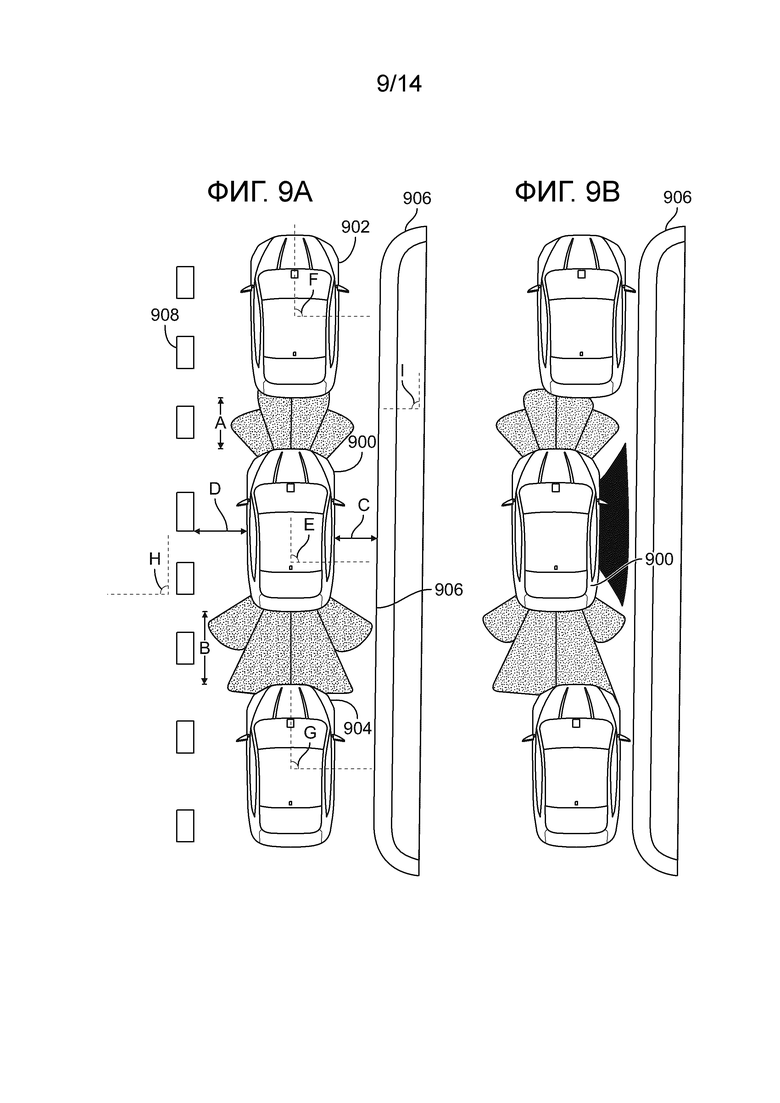
Подпрограмма въезда может находить результаты парковки с учетом размеров места, которые определены на 503, и локальных размеров транспортного средства, которые определены на 504. Результат парковки является конечным положением парковки транспортного средства относительно преград, окружающих место для парковки. Со ссылкой на фиг. 9а, следующие размеры могут описывать результат парковки: локальные размеры транспортного средства 900, размеры передних и задних преград 902 и 904 (показаны в виде транспортных средств, но могут быть другими преградами, такими как обломки), относительное расстояние А между передним торцом транспортного средства 900 и передней преградой 902, относительное расстояние B между задним торцом транспортного средства 900 и задней преградой 904, относительное расстояние С между транспортным средством 900 и бордюрным камнем 906, относительное расстояние D между транспортным средством 900 и разметкой полосы 908 движения, выравнивания E, F и G транспортного средства 900 и преград 902 и 904, выравнивание H по полосе 908 движения транспорта, выравнивание I по бордюрному камню. Подпрограмма въезда может делать аналогичные измерения в вертикальном направлении. Выполнение датчиков транспортного средства и процессора транспортного средства с возможностью захватывать наружные размеры известно в данной области техники. Например, смотрите патент США под № 8,560,175, который настоящим включен в состав посредством ссылки во всей своей полноте.
Следует принимать во внимание, что, хотя размеры показаны в виде единых размеров на фиг. 9А, размеры могут содержать в себе множество измерений. Например, подпрограмма въезда может разбивать размер А на тысячи измерений от переднего края транспортного средства до заднего края переднего транспортного средства. Фиг. 12 иллюстрирует эту технологию, где общий размер А содержит в себе множество измерений с A1 по An. Множество измерений может быть объединено согласно предопределенному алгоритму, чтобы давать единый характерный размер, такой как размер А. В различных вариантах осуществления, характерный размер является наименьшим из множества измерений.
Подпрограмма въезда может применять технологии для упрощения или ускорения вычисления. В одном из примеров, подпрограмма въезда предсказывает вероятно наилучшие результаты с учетом беглого просмотра набора данных, и затем выполняет тщательный или детальный анализ только над предсказанными лучшими результатами. В еще одном примере, подпрограмма въезда находит результаты в некоторых точно определенных приращениях (например, приращениях в два сантиметра от переднего края задней преграды).
В итоге, подпрограмма въезда отбраковывает или фильтрует тщательно проанализированные результаты в предопределенное количество наиболее пригодных результатов с учетом различных критериев. Подпрограмма въезда может осуществлять отбраковку с помощью метода оптимизации, такого как метод оптимизации Эйлера-Лагранжа.
В различных вариантах осуществления, подпрограмма въезда фильтрует результаты, оптимизируя один или более критериев 505 с учетом приоритетов 506 парковки. Фиг. 8 показывает карту 800 различных примерных критериев 801, в том числе:
(1) Прогнозируемый промежуток до дверей 802 транспортного средства, включая дверь 803 багажника транспортного средства, и одну или более из пассажирских дверей 804 транспортного средства. Прогнозируемый промежуток может служить в качестве фиктивной переменной для оценки возможности, чтобы дверь полностью открывалась, а человека стоял или занимал пространство возле двери. В различных вариантах осуществления, подпрограмма въезда оценивает только двери транспортного средства, соответствующие существующим пассажирам. В различных вариантах осуществления, подпрограмма въезда разбивает прогнозируемый промежуток на составляющую промежутка для двери (то есть, сколько места дверь имеет для открывания) и составляющую промежутка для человека (то есть, какое пространство или двухмерную площадь может занимать человек рядом с открытой дверью).
(2) Доступность 805 въезда транспортного средства, которая является количественным показателем того, насколько сложный маневр парковки требуется для постановки на стоянку транспортного средства в оцениваемом положении. В различных вариантах осуществления, доступность въезда транспортного средства зависит от количества переключений передач (например, с переднего хода на задний ход или с заднего хода на передний ход), необходимых для въезда на место для парковки. Следует принимать во внимание, что способы для предсказания маневров парковки с учетом измеренных размеров известны в данной области техники. Например, смотрите патент США под № 8,560,175, который настоящим включен в состав посредством ссылки во всей своей полноте.
(3) Доступность 806 выезда транспортного средства, которая является количественным показателем того, насколько сложный маневр вождения требуется для выезда с места для парковки. В различных вариантах осуществления, доступность выезда транспортного средства зависит от количества переключений передач, необходимых для выезда с места для парковки.
В различных вариантах осуществления, подпрограмма въезда оценивает доступность выезда, при условии, что размеры А и В сокращаются до предопределенной оценки, такой как нулевая, в то время как автомобиль припаркован. Точнее и со ссылкой на фиг. 9А, подпрограмма въезда может предполагать, что новое транспортное средство встает на стоянку непосредственно за текущим транспортным средством 900, в то время как переднее транспортное средство 902 остается неподвижным, таким образом препятствуя движению задним ходом транспортного средства 900 относительно его исходного положения. Подпрограмма въезда затем рассчитывает доступность выезда, при условии, что только размер А будет в распоряжении в продольном направлении. Затем, подпрограмма въезда может предполагать, что транспортное средство 904 остается неподвижным, в то время как новое транспортное средство встает на стоянку непосредственно перед текущим транспортным средством 900, сокращая размер А по существу до нуля. Подпрограмма въезда затем рассчитывает доступность выезда, при условии, что только размер В будет в распоряжении в продольном направлении.
(4) Правомерность 807 парковки. Различные юрисдикции имеют правовые нормы касательно того, насколько близко (или далеко) транспортное средство должно вставать на стоянку относительно бордюрного камня, пожарного гидранта, знака остановки и т.д. Транспортное средство 100 может загружать такую информацию из удаленной базы данных и затем оценивать результат парковки с учетом применяемых правовых норм.
Далее, возвращаясь на фиг. 5, подпрограмма въезда может накапливать приоритеты 506, которые включают в себя настраиваемые пользователем ранжированные иерархии важности приведенных выше критериев парковки. Подпрограмма въезда затем отображает предопределенное количество результатов парковки с учетом приоритетов на 507. В одном из примеров, пользователь назначает приоритеты доступности выезда транспортного средства как в прямом, так и обратном направлениях. В этом примере, подпрограмма въезда отображает результаты парковки, которые дают водителю возможность выезжать, при условии, что размеры А и В сокращаются до нуля, как описано выше. В еще одном примере, водитель назначает приоритеты (а) по меньшей мере определенной величине пространства доступности двери багажника (например, размеру В на фиг. 9а) и (b) способности покидать пространство в любом направлении. Если многочисленные результаты парковки являются подходящими (то есть, удовлетворяют перечисленным приоритетам), то подпрограмма въезда отображает результаты, которые также оптимизируют другие критерии, такие как въезд транспортного средства или промежуток до двери багажника.
Подпрограмма въезда может давать возможность водителю просматривать путем прокрутки различные результаты парковки и выбирать новые критерии или приоритеты, в то время как транспортное средство работает на холостом ходу. В различных вариантах осуществления, результаты парковки содержатся в списке или в последовательности списков, сортированных согласно оптимизированным критериям или наибольшему рангу самых высоких критериев. В различных вариантах осуществления, подпрограмма въезда автоматически выбирает результат парковки для пользователя.
После того, как подпрограмма парковки выбирает результат парковки, подпрограмма въезда направляет транспортное средство в соответствии с 508. Направление может происходить с помощью автономного управления транспортным средством, с помощью полуавтономного управления транспортным средством или с помощью визуальных команд для пользователя. Пригодное направляющее программное обеспечение известно в данной области техники.
Фиг. 6 в целом показывает и иллюстрирует примерную подпрограмму 600 выезда. Подпрограмма 600 выезда может загружаться и выполняться в ответ на ввод в действие режима выезда подпрограммой 400 режима на 601.
Подпрограмма выезда может собирать размеры места 602 парковки. На 603 подпрограмма выезда может собирать локальные размеры транспортного средства. На 606, подпрограмма выезда может отображать выезды с учетом критериев 604 выезда и приоритетов 605 выезда. Критерии могут включать в себя (а) доступность выезда с места для парковки в прямом направлении, (b) доступность выезда с места для парковки задним ходом в обратном направлении, (с) правомерность маневра выезда, и другие.
Подпрограмма выезда может ранжировать выезды, с учетом приоритетов пользователя. В одном из примеров, пользователь предпочитает выезжать с места для парковки вперед и, таким образом, подпрограмма выезда назначает выездам вперед более высокий ранг. В еще одном варианте осуществления, пользователь предпочитает минимизацию общего количества переключений передач и, таким образом, программа выезда ранжирует выезды соответствующим образом. Как обсуждено выше, в различных вариантах осуществления, доступность зависит от количества переключений передач (то есть, изменений направления), необходимых для выполнения выезда.
В итоге, подпрограмма выезда выбирает выезд посредством команды пользователя или автоматически. На 607 подпрограмма выезда может направлять транспортное средство соответствующим образом. Направление может происходить с помощью автономного управления транспортным средством, с помощью полуавтономного управления транспортным средством, или с помощью визуальных команд для пользователя. Пригодное направляющее программное обеспечение известно в данной области техники.
Фиг. 7 в целом показывает и иллюстрирует примерную стояночную подпрограмму 700. Стояночная подпрограмма 700 может загружаться и выполняться в ответ на приведение в действие режима парковки подпрограммой 400 режима на 701. Подпрограмма режима как правило выполнена с возможностью (а) предупреждать пользователя, когда новая преграда, такая как транспортное средство, загораживает текущее транспортное средство, и (b) разубеждать оператора новой преграды от загораживания текущего транспортного средства.
На 702, стояночная подпрограмма может идентифицировать новую возможную преграду, такую как приближающееся транспортное средство. На 703, стояночная подпрограмма может измерять размеры текущего места для парковки. На 704 и 705, стояночная подпрограмма может собирать локальные размеры транспортного средства и размеры приближающегося транспортного средства. Стояночная подпрограмма может активно измерять эти размеры или может загружать их из базы данных с учетом информационной модели транспортного средства.
Стояночная подпрограмма может предсказывать результаты 706 парковки и, в особенности, предсказывает, как изменятся размеры, описывающие текущий результат парковки, с учетом приближающейся преграды или транспортного средства (эти размеры описаны ниже со ссылкой на фиг. 9а). В различных вариантах осуществления, стояночная подпрограмма динамически обновляет результаты парковки с учетом новых событий и, в особенности, новых данных о положении приближающейся преграды или транспортного средства. В различных вариантах осуществления, стояночная подпрограмма предполагает, что приближающееся транспортное средство встанет на стоянку в наиболее благоприятном возможном положении по отношению к текущему транспортному средству. В различных вариантах осуществления, стояночная подпрограмма предполагает, что приближающееся транспортное средство встанет на стоянку в некотором заданном пользователем наложении наиболее предпочтительного и наименее предпочтительного положений (фактически не сталкиваясь с текущим транспортным средством). В различных вариантах осуществления, поставленное на стоянку транспортное средство задерживает переход на следующий этап до тех пор, пока приближающееся транспортное средство не останавливается.
Стояночная подпрограмма может отправлять дистанционное или беспроводное послание 708 на устройство, такое как мобильный телефон, связанный с пользователем, когда вероятные результаты удовлетворяют предопределенным критериям 707 предупреждения. В одном из примеров, пользователь конфигурирует стояночную подпрограмму для отправки сообщения пользователю, когда происходит одно или более из следующего: (а) предсказано, что приближающееся транспортное средство будет препятствовать выезду текущего транспортного средства из поставленного на стоянку положения в переднем направлении, (b) предсказано, что приближающееся транспортное средство будет препятствовать выезду текущего транспортного средства из поставленного на стоянку положения в переднем направлении, (с) приближающееся транспортное средство вызвало (а) или (b), (d) приближающееся транспортное средство столкнулось с текущим транспортным средством.
Стояночная подпрограмма может быть выполнена с возможностью принимать команду 709 пользователя в ответ на дистанционное послание. Команда может побуждать транспортное средство перемещаться 710 автономно. В качестве альтернативы или в дополнение, команда может побуждать транспортное средство вводить в действие один или более знаков 711, направленных на приближающееся транспортное средство. Знаки могут быть световыми сигналами, звуковыми сигналами или электронным сообщением (если приближающееся транспортное средство оборудовано таким образом).
В качестве альтернативы или в дополнение, стояночная подпрограмма может автоматически выполнять любое из вышеприведенного без команды пользователя или согласно заранее заданным предпочтениям пользователя. В различных вариантах осуществления, стояночная подпрограмма побуждает задние фонари текущего транспортного средства мигать с частотой, изменчиво зависящей от размера между текущим транспортным средством и ближайшим краем приближающегося транспортного средства.
Примерные применения
Фиг. 9 и 10 в целом показывают и иллюстрируют различные примерные применения настоящего изобретения. Следует принимать во внимание, что эти фигуры имеют двойное назначение: (1) они представляют и описывают действующее состояние транспортного средства относительно других транспортных средств, бордюрного камня и других преград; (2) они представляют возможные графические данные для отображения на пользовательском интерфейсе для содействия направлению водителя в или из подходящего положения парковки.
Фиг. с 9а по 9d в целом применяются ко въезду на парковку, а фиг. с 10а по 10с в целом применяются к выезду с парковки. Однако, следует принимать во внимание, что подпрограмма въезда может быть выполнена с возможностью отображать информационное наполнение, связанное с фиг. с 10а по 10с, для того чтобы показывать возможные выезды касательно места для парковки. Следует принимать во внимание, что стояночная подпрограмма может быть выполнена с возможностью отображать (или побуждать отображаться на мобильном устройстве пользователя) информационное наполнение, связанное с фиг. с 10а по 10с.
В различных вариантах осуществления, программа 120 парковки отображает эти фигуры в качестве альтернативы или в дополнение к отображениям или операциям, раскрытым выше. В одном из вариантов осуществления, подпрограмма въезда, после ввода в действие, воздерживается от предварительной оценки места для парковки по критериям и приоритетам и динамически отображает приемлемые, и формирует графические данные по фиг. 9 и 10, с учетом этапов 502, 503 и 504, в то время как водитель выполняет въезд на парковку. Аналогичное описание применяется к подпрограмме выезда. Это может упрощать подпрограмму и давать возможность водителю принимать его или ее собственные решения о пригодности места для парковки. В других вариантах осуществления, эти графические данные дополняют готовые подпрограммы и отображаются, например, на этапах 507, 606 и 708. В различных вариантах осуществления, подпрограмма въезда выполнена с возможностью давать возможность водителю выбирать между вышеприведенными вариантами выбора и альтернативами. Следует принимать во внимание, что эти графические данные могут быть динамическими и изменяться, когда локальные датчики регистрируют новые данные.
В различных вариантах осуществления, программа парковки классифицирует выезды с парковки и отображает выезды согласно классу: одному классу выезда, где транспортное средство поддерживает передний ход или задний ход на протяжении всего времени выезда, и будет указываться ссылкой как «беспрепятственный выезд»; другому классу выезда, где транспортное средство должно подать вперед, двигаться задним ходом, подать вперед, двигаться задним ходом, и т. д., все время настраивая свое выравнивание до тех пор, пока транспортное средство не имеет достаточное пространство и выравнивание для выезда с места для парковки. Такая же концепция применяется, если водитель должен сначала двигаться задним ходом, затем подать вперед, и т.д. Это будет указываться ссылкой как «точно определенные выезды». Следует принимать во внимание, что программа 120 парковки по настоящему изобретению может давать пользователю возможность выбирать только беспрепятственные выезды или оба из беспрепятственных и точно определенных выездов в качестве приемлемых вариантов выбора выезда с парковки. В различных вариантах осуществления, это предпочтение учитывается в виде доступности выезда транспортного средства, как описано выше и показано на фиг. 8. Следует принимать во внимание, что аналогичное описание может применяться к въезду на парковку (то есть, въезды на парковку могут быть классифицированы или отображаться как беспрепятственные или точно определенные в прямом и обратном направлениях).
В различных вариантах осуществления, программа 120 парковки рассчитывает и указывает, с помощью разных текстовых или графических данных, следующие выезды: (а) беспрепятственный выезд в конкретном направлении; (b) точно определенный выезд в конкретном направлении. В различных вариантах осуществления, программа 120 парковки отображает или указывает количество переключений передач, требуемых во время точно определенного выезда. В различных вариантах осуществления, программа парковки отображает соответствующую информацию для въездов на парковку. В различных вариантах осуществления, максимальное количество переключений передач закодировано в программу (например, десять или более переключений передач неприемлемо, и место для парковки, требующее десять или более переключений передач указывалось бы как непригодное или закрытое). В различных вариантах осуществления, меньшее максимальное применяется к программе въезда, чем к программе выезда (или максимальное значение не применяется к программе выезда), поэтому, программа выполнена с возможностью направлять водителя с тесного места для парковки, если необходим сложный точно определенный выезд.
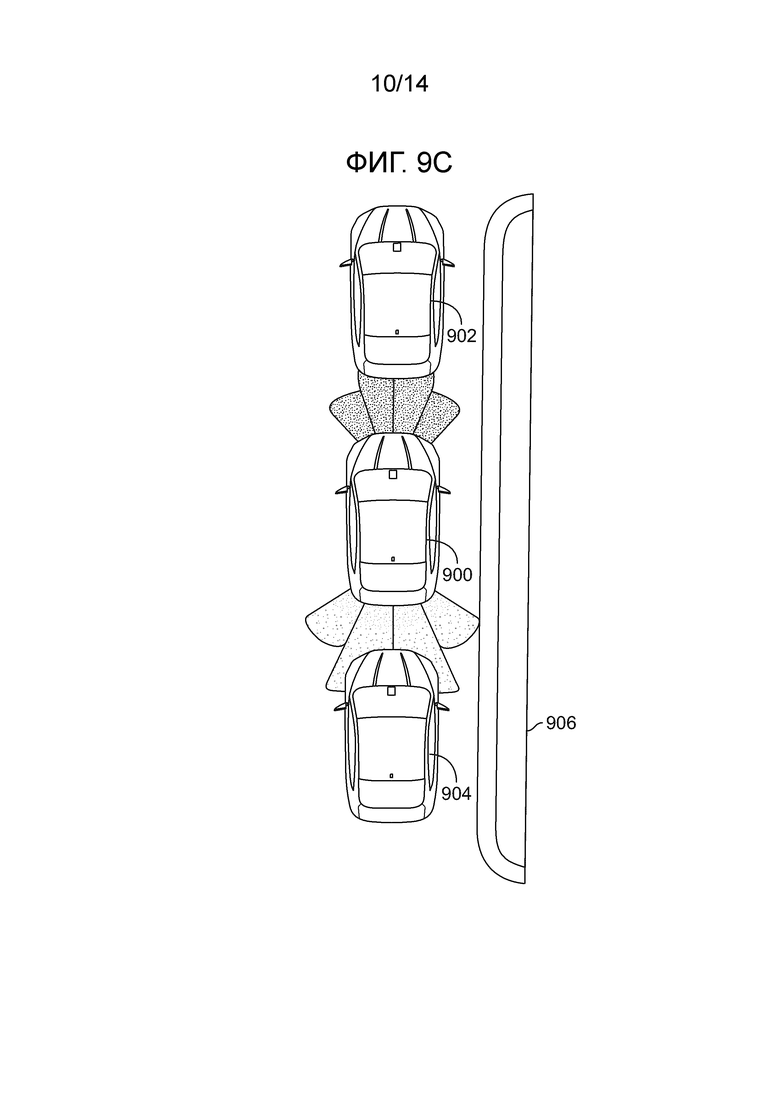
Со ссылкой на фиг. 9 и 10, следует принимать во внимание, что серые пузыри или выступы могут означать, что беспрепятственный выезд с парковки возможен в соответствующем направлении; белые выступы могут означать, что точно определенный выезд с парковки возможен в соответствующем направлении; пунктирные линии могут указывать путь для выезда; белые (или красные - не показаны) выступы, связанные с дополнительными текстовыми или графическими данными остановки означают, что выезд не возможен; черные выступы могут означать, что размер слишком большой (например, неправомерный). Как описано выше, следует принимать во внимание, что графические данные могут изменяться, после пользовательского выбора, для отражения въездов на парковку вместо выездов с парковки. Точнее, серые выступы могут означать, что беспрепятственный въезд на парковку возможен в соответствующем направлении; белые выступы могут означать, что точно определенный въезд возможен в соответствующем направлении; пунктирные линии могут указывать путь для въезда; белые (или красные - не показаны), связанные с дополнительными графическими данными, могут означать, что въезд не возможен.
Фиг. с 9а по 9d в целом иллюстрируют возможные графические данные для отображения процесса парковки посредством подпрограммы въезда, а точнее, иллюстрируют текущее транспортное средство 900, переднее транспортное средство 902, и заднее транспортное средство 904.
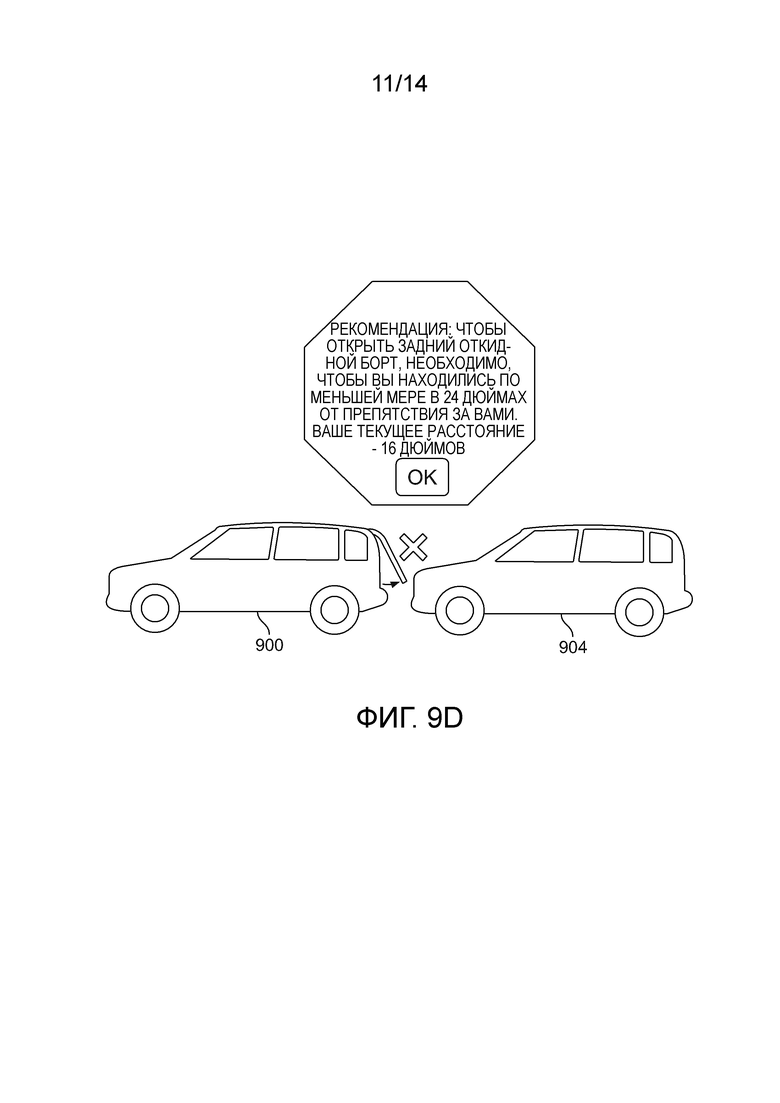
На фиг. 9а, текущее транспортное средство 900 способно к беспрепятственному выезду как в прямом, так и в обратном направлениях. На фиг. 9b, текущее транспортное средство способно к беспрепятственному выезду как в прямом, так и в обратном направлениях, но на данный момент находится в неправомерном положении по отношению к бордюрному камню. На фиг. 9с, текущее транспортное средство 900 способно к беспрепятственному выезду в прямом направлении, но будет требовать точно определенного выезда в направлении назад, если размер А сократится до нуля. На фиг. 9d, текущее транспортное средство находится в положении, где заднее транспортное средство создало препятствие полному открыванию двери багажника. В различных вариантах осуществления, это событие включено в состав в виде части графических данных по фиг. с 9а по 9с, например, в качестве отдельного цвета.
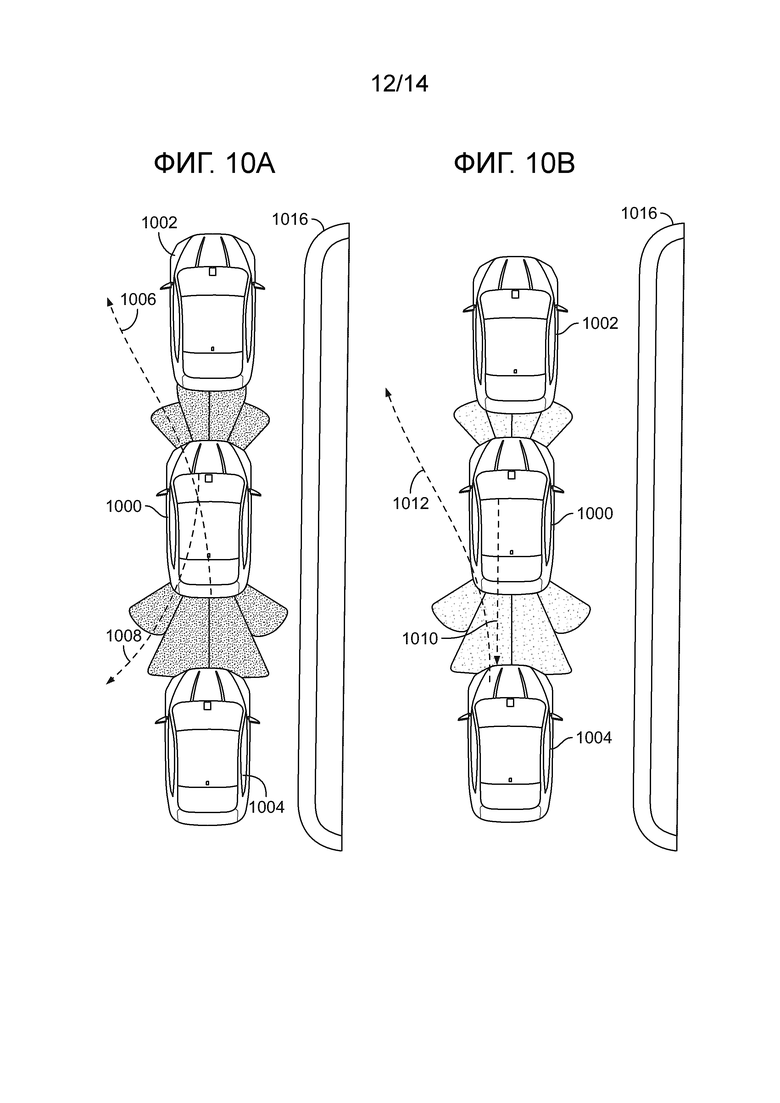
Фиг. с 10а по 10с в целом включают в себя графические данные, отображаемые в течение процесса выезда подпрограммой выезда и, точнее, иллюстрируют текущее транспортное средство 1000, переднее транспортное средство 1002, заднее транспортное средство 1004, рассчитанные пути 1006, 1008, 1010 и 1012 выезда, указатель 1014 остановки, и бордюрный камень 1016.
На фиг. 10а, текущее транспортное средство 1000 способно к беспрепятственному выезду по рассчитанному пути 1006 или рассчитанному пути 1008. На фиг. 10b, текущее транспортное средство 1000 способно к точно определенному выезду посредством движения задним ходом согласно рассчитанному пути 1010, затем подачи вперед согласно рассчитанному пути 1012. На фиг. 10с, текущее транспортное средство 1000 заперто передним транспортным средством 1002 и задним транспортным средством 1004. Беспрепятственный или точно определенный выезды невозможны, как указано графическими данными 1014.
Следует принимать во внимание, что в дополнение к цветовым схемам фиг. 9 и 10, программа 120 парковки может количественно определять соответствующий размер числом. Следует принимать во внимание, что пользователь может вызывать экран, соответствующий фиг. 9а, который показывает числа, соответствующие всем измеренным размерам. Хотя показано отсутствие путей въезда, следует принимать во внимание, что подпрограмма въезда может быть выполнена с возможностью рассчитывать путь въезда, подобный (хотя и обратный) путям 1006, 1008, 1010 и 1012.
Далее, с обращением к фиг. 11, в целом показан и проиллюстрирован примерный ключ 1100, связанный с настоящим изобретением. Следует принимать во внимание, что функциональные возможности примерного ключа 1100 могут быть включены в любое подходящее устройство, такое как приложение, загруженное на мобильный телефон 105. Ключ 110 включает в себя кнопки с 1101 по 1105. Кнопки 1101 и 1102 запирают и отпирают связанное транспортное средство.
Кнопки с 1103 по 1105 передают сигналы на связанное транспортное средство, побуждающие транспортное средство перемещаться автономно. Точнее, кнопка 1103 дает команду транспортному средству оптимизировать выезд вперед. Это повлекло бы за собой автоматическое маневрирование транспортного средства до тех пор, пока оно не будет готово к беспрепятственному выезду в прямом направлении (подобная кнопка может быть включена в состав для беспрепятственного выезда в обратном направлении). Как результат, транспортное средство будет выполнять маневр точно определенного выезда до тех пор, пока оно не достигает конечного этапа выезда с места для парковки. Кнопка 1104 дает команду транспортному средству оптимизировать пространство открывания двери багажника. Как результат, транспортное средство будет подавать вперед до тех пор, пока размер А не сокращается по существу до нуля, или размер В не достигает предопределенного значения, улучшая доступ пользователя к двери багажника. Кнопка 1105 дает команду транспортному средству центрироваться между передним транспортным средством 1002 и задним транспортным средством 1004, так чтобы размеры А и В были по существу идентичными. Центрирование может минимизировать возможности столкновения, когда выезжает переднее или заднее транспортное средство. В различных вариантах осуществления, программно реализованная программа на мобильном устройстве, соответствующая ключу 1100, дает водителю возможность задавать один или более из размеров, показанных на фиг. 9а, что побуждает транспортное средство автономно перестраиваться соответствующим образом.
Программа 120 парковки данного транспортного средства может быть выполнена с возможностью принимать, интерпретировать и обрабатывать команды с ключа 1100. В различных вариантах осуществления, команды с ключа 110 побуждают программу 120 парковки взаимодействовать с и управлять программой автономного вождения. В различных вариантах осуществления, программа 120 парковки выполняет команду для доведения до максимума размера вплоть до некоторой предопределенной цифры. Например, если переднее транспортное средство отсутствует, и пользователь нажимает команду центрирования, текущее транспортное средство может довести до максимума размер В вплоть до предопределенного значения, а затем остановиться. Кроме того, следует принимать во внимание, что все команды могут фильтроваться через программу 120 парковки для устранения столкновений, и чтобы программа 120 парковки могла отказываться реализовывать любую команду, которая вызывает столкновение.
Следует принимать во внимание, что согласно формуле изобретения, «снаряженное транспортное средство» настоящим определено транспортным средством, содержащим систему рулевого управления, систему ускорения с двигателем или электродвигателем, тормозную систему, в том числе тормоза, выполненные с возможностью замедлять транспортное средство, колеса, среди которых по меньшей мере одно из колес выполнено с возможностью принимать крутящий момент, вырабатываемый двигателем или электродвигателем, одно или более сидений, по меньшей мере один процессор, и память, функционально присоединенная к процессору. Следует принимать во внимание, что вышеприведенное определение применяется, и применяется только тогда, когда формула изобретения конкретно включает в себя термин «снаряженное транспортное средство».
Следует принимать во внимание, что для целей формулы изобретения, термин «одновременно», в то время как он относится к компьютерной программе, передает, что программы ставятся в очередь для немедленной обработки (или обрабатываются) одновременно. Термин «одновременно» не требует, чтобы процессор одновременно выполнял две программы фактически. Другими словами, термин «одновременно» охватывает ситуацию, где одиночное ядро процессора озадачено выполнением двух потоков программного обеспечения.
Следует принимать во внимание, что для целей формулы изобретения, термин «переднее препятствие» означает, что транспортное средство по существу заперто в переднем направлении или прямом направлении. Другими словами, транспортное средство должно выезжать с помощью беспрепятственного движения задним ходом (то есть, двигаясь назад, тем временем, выполняя одно или более управлений рулем) или точно определенного движения задним ходом (например, назад, вперед, назад, и т. д., тем временем, выполняя последовательность управлений рулем). Термин «заднее препятствие» означает, что транспортное средство по существу заперто в заднем направлении или обратном направлении. Другими словами, транспортное средство должно выезжать с помощью беспрепятственного движения вперед (то есть, двигаясь вперед, тем временем, выполняя одно или более управлений рулем) или точно определенного движения вперед (например, двигаясь вперед, назад, вперед, и т. д., тем временем, выполняя последовательность управлений рулем или маневров рулевым механизмом).
Следует принимать во внимание, что для целей формулы изобретения, термин «беспрепятственный» въезд/выезд означает въезд/выезд, который не требует переключения с переднего хода на задний ход или с заднего хода на передний ход; «точно определенный» въезд/выезд означает въезд/выезд, который требует по меньшей мере одного переключения с переднего хода на задний ход или с заднего хода на передний ход.
Следует принимать во внимание, что для целей формулы изобретения, термин «программа» охватывает одну или более программ.
Описанные выше варианты осуществления и, в частности, любые «предпочтительные» варианты осуществления, являются возможными примерами реализаций и изложены всего лишь для ясного понимания принципов изобретения. Многие варианты и модификации могут быть произведены в отношении описанных выше вариантов(а) осуществления, по существу не отходя от сущности и принципов технологий, описанных в материалах настоящей заявки. Все модификации подразумеваются включенными в материалы настоящей заявки в объеме данного изобретения и защищенными нижеследующей формулой изобретения.
Изобретение относится к системам управления транспортным средством. Транспортное средство содержит датчики, выполненные с возможностью измерять окружающие зоны транспортного средства и процессоры. Процессоры выполнены с возможностью, в то время, когда транспортное средство припарковано, определять стратегии выезда, основываясь на измеренных окружающих зонах, ранжировать стратегии выезда, основываясь на количестве переключений передач, требуемом для выезда транспортного средства, передавать ранжированные стратегии выезда на удаленное устройство и автономно перемещать транспортное средство в ответ на передачу и прием команды от удаленного устройства. Достигается повышение безопасности управления транспортным средством. 2 н. и 16 з.п. ф-лы, 18 ил.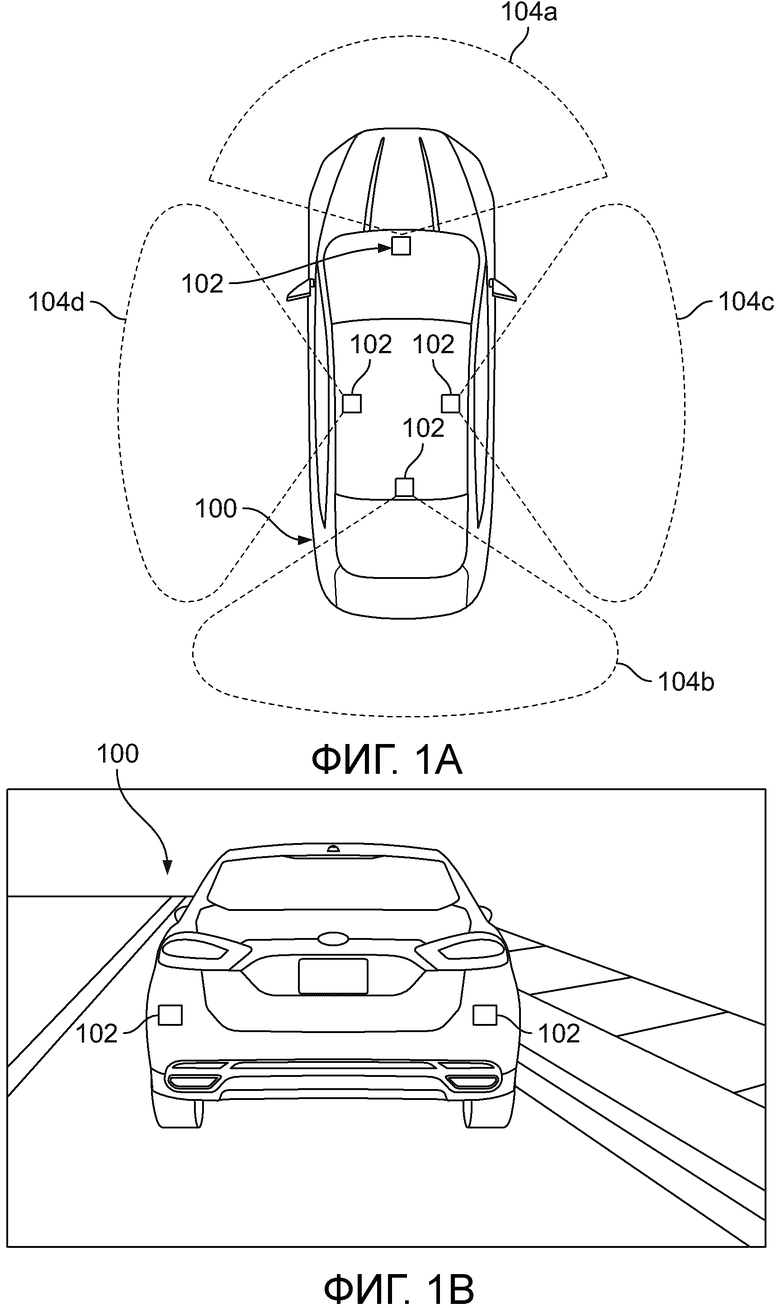
1. Транспортное средство, содержащее:
датчики, выполненные с возможностью измерять окружающие зоны транспортного средства; и
процессоры, выполненные с возможностью:
в то время когда транспортное средство припарковано:
определять стратегии выезда, основываясь на измеренных окружающих зонах;
ранжировать стратегии выезда, основываясь на количестве переключений передач, требуемом для выезда транспортного средства;
передавать ранжированные стратегии выезда на удаленное устройство; и
автономно перемещать транспортное средство в ответ на передачу и прием команды от удаленного устройства.
2. Транспортное средство по п. 1, содержащее также дверь багажника, при этом процессоры также выполнены с возможностью:
после парковки определять, сможет ли дверь багажника транспортного средства полностью открываться, основываясь на измеренных окружающих зонах.
3. Транспортное средство по п. 1, содержащее также дверь багажника, при этом процессоры также выполнены с возможностью:
прогнозировать серию возможных результатов параллельной парковки, основываясь на измеренных окружающих зонах, и определять, для каждого из возможных результатов параллельной парковки, сможет ли дверь багажника транспортного средства полностью открываться.
4. Транспортное средство по п. 1, в котором процессоры также выполнены с возможностью:
определять, основываясь на измеренных окружающих зонах, являются ли выезды беспрепятственными или точно определенными.
5. Транспортное средство по п. 1, содержащее также дверь багажника, при этом процессоры также выполнены с возможностью:
побуждать графические данные, основываясь на измеренных окружающих зонах, появляться на дисплее, графические данные указывают:
стратегии выезда; и
сможет ли транспортное средство полностью открывать дверь багажника транспортного средства.
6. Транспортное средство по п. 5, в которой графические данные указывают, являются ли выезды беспрепятственными или точно определенными.
7. Транспортное средство по п. 1, в котором процессоры также выполнены с возможностью:
определять, основываясь на измеренных окружающих зонах, находится ли транспортное средство на правомерном расстоянии от выявленных бордюрных камней.
8. Транспортное средство по п. 1, в котором процессоры также выполнены с возможностью:
автоматически приводить в действие режим въезда на парковку и автоматически приводить в действие режим выезда с парковки, основываясь на измеренных окружающих зонах.
9. Транспортное средство по п. 1, в котором процессоры также выполнены с возможностью побуждать транспортное средство довести до максимума пространство для доступа к двери багажника вплоть до предопределенного значения в ответ на прием сигнала от удаленного устройства.
10. Транспортное средство по п. 1, в котором
процессоры также выполнены с возможностью:
побуждать транспортное средство передавать беспроводное сообщение, когда приближающееся транспортное средство вызывает одно из переднего препятствия и заднего препятствия, сообщение включает в себя то, имеется ли в распоряжении новый выезд с парковки, и, если так, является ли следующий выезд с парковки беспрепятственным или точно определенным.
11. Способ управления транспортным средством, содержащий этапы, на которых:
измеряют, посредством датчиков транспортного средства, окружающие зоны транспортного средства; и
в то время, когда транспортное средство припарковано:
определяют, посредством процессоров транспортного средства, стратегии выезда, основываясь на измеренных окружающих зонах;
ранжируют, посредством процессоров транспортного средства, стратегии выезда, основываясь на количестве переключений передач, требуемом для выезда транспортного средства;
передают, посредством процессоров транспортного средства, ранжированные стратегии выезда на удаленное устройство; и
в ответ на передачу и прием команды от удаленного устройства, автономно перемещают, посредством процессоров транспортного средства, транспортное средство.
12. Способ по п. 11, содержащий также этапы, на которых:
прогнозируют, посредством процессоров транспортного средства, серию возможных результатов параллельной парковки, основываясь на измеренных окружающих зонах, и определяют, посредством процессоров транспортного средства, для каждого из возможных результатов параллельной парковки, сможет ли дверь багажника транспортного средства полностью открываться.
13. Способ по п. 11, содержащий также этапы, на которых:
отображают на дисплее, посредством процессоров транспортного средства, графические данные, основываясь на измеренных окружающих зонах, графические данные указывают:
стратегии выезда; и
сможет ли транспортное средство полностью открывать дверь багажника транспортного средства.
14. Способ по п. 13, в котором графические данные указывают, являются ли выезды беспрепятственными или точно определенными.
15. Способ по п. 11, содержащий также этапы, на которых:
основываясь на измеренных окружающих зонах, определяют, посредством процессоров транспортного средства, находится ли транспортное средство на правомерном расстоянии от выявленных бордюрных камней.
16. Способ по п. 11, содержащий также этапы, на которых:
автоматически приводят в действие, посредством процессоров транспортного средства, режим въезда на парковку и автоматически приводят в действие режим выезда с парковки, основываясь на измеренных окружающих зонах.
17. Способ по п. 11, содержащий также этапы, на которых:
передают, посредством процессоров транспортного средства, сигнал от удаленного устройства, побуждающий транспортное средство довести до максимума пространство для доступа к двери багажника вплоть до предопределенного значения.
18. Способ по п. 11, содержащий также этапы, на которых:
побуждают, посредством процессоров транспортного средства, транспортное средство передавать беспроводное сообщение, когда приближающееся транспортное средство вызывает одно из переднего препятствия и заднего препятствия.
| УСТРОЙСТВО СВЯЗИ, СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ СВЯЗИ И ПРОГРАММА | 2011 |
|
RU2491720C2 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ СОДЕЙСТВИЕМ ПАРКОВКЕ | 2011 |
|
RU2533775C2 |

