Настоящая заявка касается способа контроля безопасности крана, в частности башенного поворотного крана, а также системы для контроля крена крана по пп.1 и 15 формулы изобретения.
Башенные поворотные краны возводятся и разбираются очень часто. При этом должны приниматься необходимые меры предосторожности, так чтобы был гарантирован надлежащий уровень безопасности, в частности, должна обеспечиваться необходимая устойчивость крана.
Контроль устойчивости крана в настоящее время известным образом осуществляется путем измерения вторичных значений на кране. При этом контролируется момент, как следствие нагрузки на кран от момента нагрузки. Все другие влияния не учитываются. Эти влияния представляют собой, например, ошибки при возведении крана, когда он, напр., неправильно нивелирован, оседание основания, допуски при возведении башни, ветер и т.д.
Чтобы определить крен крана, принято, как в землеройно-транспортных машинах или в мобильных кранах, применять сенсоры крена, которые являются очень прочными механически и точными, и которые служат для того, чтобы либо контролировать устойчивость машины, либо улучшать качество производимой работы. Однако при этом вообще не учитывается положение верхней части крана относительно башенной системы и относительно основания.
Принято применять квадратные башенные системы. При этом устойчивость идентична только в отдельных точках. Известным образом предоставляется устройство для непрерывного анализа устойчивости, имеющее четыре удаленные друг от друга точки наблюдения, которое имеет устройства для регистрации значений, имеющих решающее значение для устойчивости. Эти устройства передают зарегистрированные значения в сравнивающее устройство для сравнения с установленными ранее допустимыми максимальными значениями, или непосредственно осуществляют отключение. При превышении заданного установленного значения в какой-либо точке наблюдения подается контрольный сигнал, который указывает, что устойчивость больше не обеспечивается. При повороте крана устойчивость изменяется.
Применяемые в настоящее время системы учитывают, таким образом, только определенную и максимальную устойчивость, без учета положения верхней части крана. Кроме того, сегодня из контроля исключены ситуации при возведении крана, что могло бы иметь губительные последствия при возведении. Контроль устойчивости у известных систем начинается только после того, как кран возведен. При работе также возникают ситуации, которые своевременно не регистрируются, напр., оседания основания или повреждения.
Поэтому задачей настоящего изобретения является предоставить способ контроля безопасности крана, а также систему для контроля крена крана, в частности башенного поворотного крана, так чтобы была обеспечена устойчивость крана во время возведения, соответственно, разборки, а также во время всей эксплуатации, и существенно улучшалось качество производимой работы.
Предлагаемый изобретением способ контроля безопасности крана, в частности башенного поворотного крана, имеющего поворотную платформу, который имеет сенсорику и управление крана, собственно известным образом отличается также по меньшей мере одним сенсором крена. В соответствии с изобретением указанный по меньшей мере один сенсор крена устанавливается и встраивается на поворотной платформе башенного поворотного крана, при этом контроль безопасности крана начинается еще и по меньшей мере во время возведения, соответственно, разборки башенного поворотного крана. При этом указанный по меньшей мере один сенсор крена отличается точной разрешающей способностью и может брать на себя самостоятельный контроль крана.
Но можно также применять сенсор крена в качестве дополнения к имеющимся устройствам безопасности с целью повышения точности контроля и тем самым безопасности. С помощью предлагаемого изобретением контроля крена крана еще во время возведения в случае недопустимого крена (наклона) поворотной платформы во время возведения крана возведение башни может немедленно корректироваться.
Предпочтительно с помощью указанного по меньшей мере одного сенсора крена определяется положение поворотной платформы. Тогда полученные результаты измерения передаются для оценки на кран, причем при превышении предельного значения активируется соответствующее мероприятие. Это может быть акустический и/или графический сигнал, так чтобы монтажник немедленно информировался о превышении этого предельного значения. После этого возведение может автоматически или же также вручную прерываться.
Возведение башенного поворотного крана известным образом начинается с монтажа основания и башни. После этого устанавливается поворотная платформа, имеющая встроенный по меньшей мере один сенсор крена. Контроль в соответствии с предлагаемым изобретением способом начинается после установки поворотной платформы, которая уже снабжена указанным по меньшей мере одним сенсором крена. При этом указанный по меньшей мере один сенсор крена устанавливается в надлежащем месте поворотной платформы, так чтобы он показывал положение поворотной платформы. При использовании значений, определенных с помощью указанного по меньшей мере одного сенсора крена, крен поворотной платформы сравнивается с креном, предусмотренным для данной конструкции, причем при превышении допустимого крена подается предупреждающий сигнал. Затем зарегистрированные данные протоколируются. При этом управление крана имеет блок памяти, в котором запоминаются зарегистрированные значения.
Предпочтительно корректировка данных, определенных с помощью указанного по меньшей мере одного сенсора крена, может предприниматься во взаимосвязи со значениями, определенными с помощью анемометра, так что дается разрешение на следующие шаги монтажа.
В следующем шаге монтируется консоль противовеса, при этом консоль противовеса и подъемная лебедка создают момент, который в результате, в зависимости от высоты башни, впоследствии приводит к крену. Затем этот крен может определяться с помощью указанного по меньшей мере одного сенсора крена и сравниваться с данными, сохраненными в памяти управления крана.
Особенно предпочтительным считается, если дополнительно к указанному по меньшей мере одному сенсору крена применяется сенсор угла поворота для определения зависящего от положения крена башни, а именно под углом или перпендикулярно к стене. Поворот на 360° может полностью отображать картину крена, также во взаимосвязи с анемометрией. После этого следует разрешение на следующие шаги монтажа, в частности на укладку необходимого монтажного противовеса.
Крен, в частности угол крена, определяется после монтажа противовеса и сравнивается с сохраненными в памяти заданными значениями. Допустимый, но также необходимый крен подтверждает, что противовес подходит к длине смонтированной стрелы.
Предпочтительно крен после монтажа стрелы еще раз записывается для протоколирования промежуточного шага.
Предлагаемый изобретением контроль с помощью указанного по меньшей мере одного сенсора крена осуществляется предпочтительно не только при возведении, но и при разборке стрелы и/или консоли противовеса. Если при этом горизонтальная сила становится больше, чем допустимо, крен возрастает, а при превышении допустимых значений крена в соответствии с изобретением подается предупреждающий сигнал.
Корректировка данных, определенных с помощью указанного по меньшей мере одного сенсора крена, может предприниматься во взаимосвязи со значениями, найденными с помощью предусмотренного анемометра, так чтобы могло следовать разрешение на следующие шаги монтажа.
Особенно предпочтительным считается, когда записанные в управлении крана крены в виде кривой нагрузки сравниваются с текущими моментами нагрузки. При этом возможные отклонения протоколируются и оцениваются.
Предпочтительно угол крена контролируется постоянно, в зависимости от момента нагрузки/опорного момента и угла поворота крана, после возведения во время эксплуатации, при этом отображаются отклонения от допустимых сохраненных в памяти значений. При этом можно обойтись без контроля воздействия ветра. Воздействие ветра может изменять крен соответственно скорости ветра. При этом должны также автоматически учитываться не предусмотренные влияния, такие как слой льда, рекламные щиты и т.д. Если эти отклонения превысят допустимые предельные значения, подается предупреждающий сигнал, и при необходимости эксплуатация прерывается.
При предлагаемом изобретением контроле, который также может представлять собой дистанционный контроль, а именно при эксплуатации и в отсутствие эксплуатации, может очень быстро устанавливаться, правильно ли возведено основание крана. С помощью предлагаемого изобретением способа может также осуществляться точный контроль особых подъемов.
Вышеназванная задача в соответствии с изобретением решается также с помощью системы для контроля безопасности крана, в частности башенного поворотного крана, имеющего поворотную платформу, с признаками п.14 формулы изобретения. Предлагаемая изобретением система имеет сенсорику и управление крана, при этом предусмотрен по меньшей мере один установленный на поворотной платформе сенсор крена для контроля безопасности во время по меньшей мере возведения, соответственно, разборки башенного поворотного крана или же также во время эксплуатации возведенного крана.
Предлагаемый изобретением способ, а также предлагаемая изобретением система могут находить дополнительное применение при контроле так называемого процесса самоподъема (наращивания). При этом максимальное допустимое отклонение для каждой башенной системы может достигаться и сохраняться в памяти системы контроля. После задания соответствующей системы может также происходить компенсация. При этом особенно предпочтительным может считаться тот факт, что при контроле крена учитываются все внешние влияния, такие как ветер, сумма допусков башни, дополнительные нагрузки, например, от количества троса и т.д.
Одной из дополнительных возможностей для уже встроенного сенсора крена может также считаться нивелировка башенного крана с нижним расположением поворотного устройства.
Другие признаки, подробности и преимущества изобретения поясняются подробнее с помощью примеров осуществления, изображенных на чертежах. Показано:
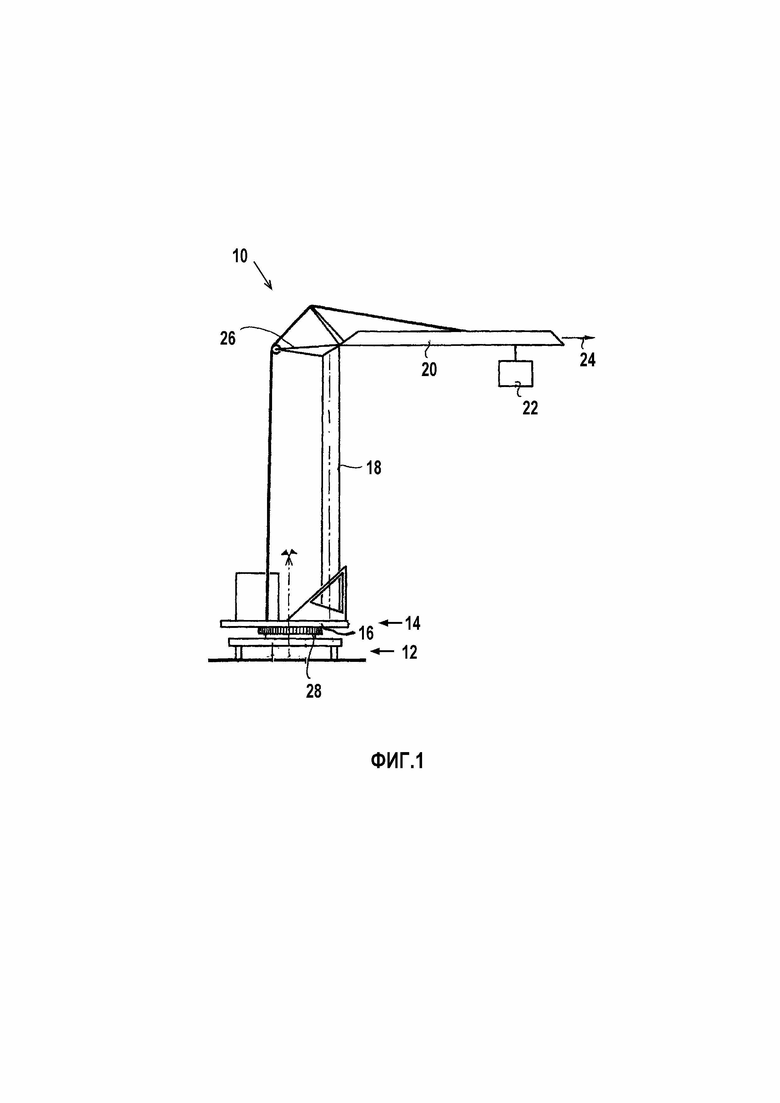
фиг.1: упрощенный схематичный вид сбоку башенного поворотного крана по первому варианту осуществления изобретения, со схематично изображенным сенсором крена для выполнения предлагаемого изобретением способа;
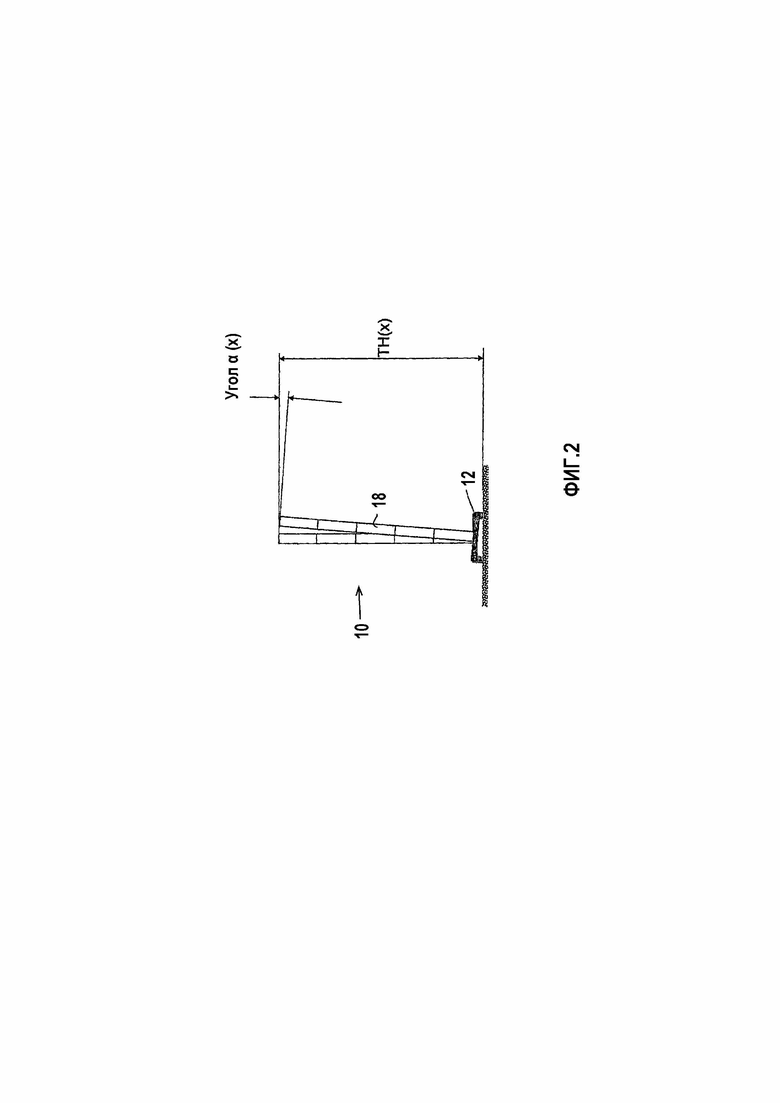
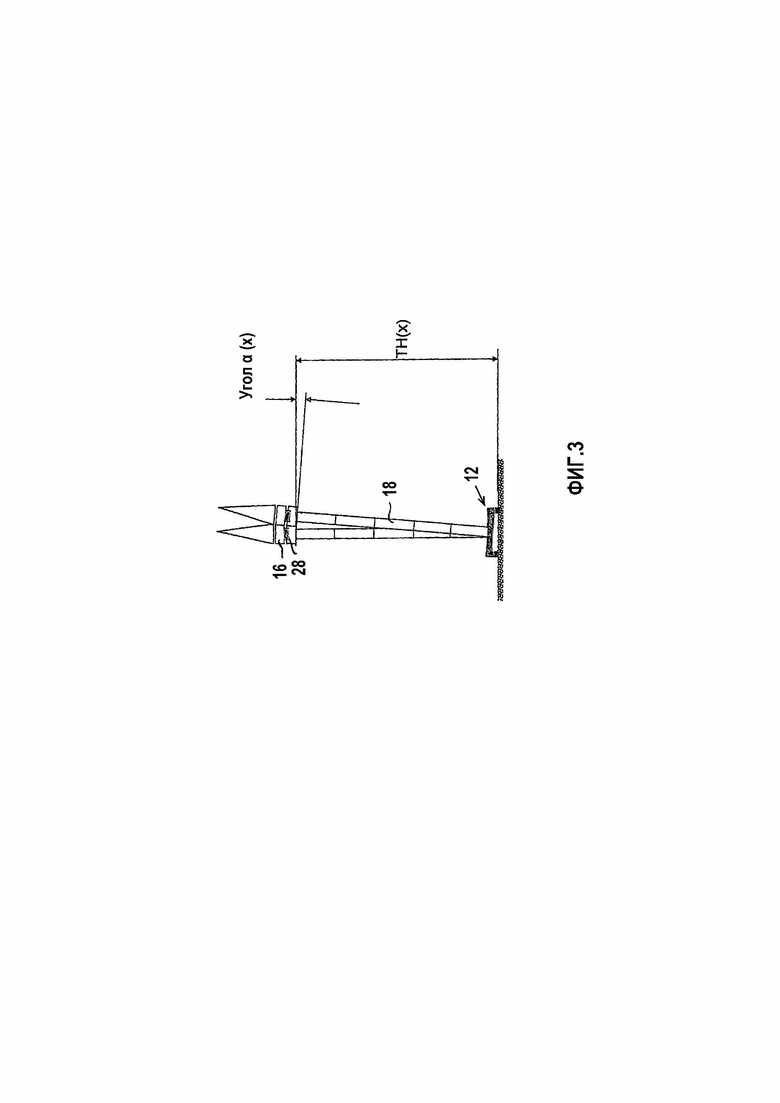
фиг.2-3: упрощенный схематичный вид сбоку башенного поворотного крана, с основанием и башней;
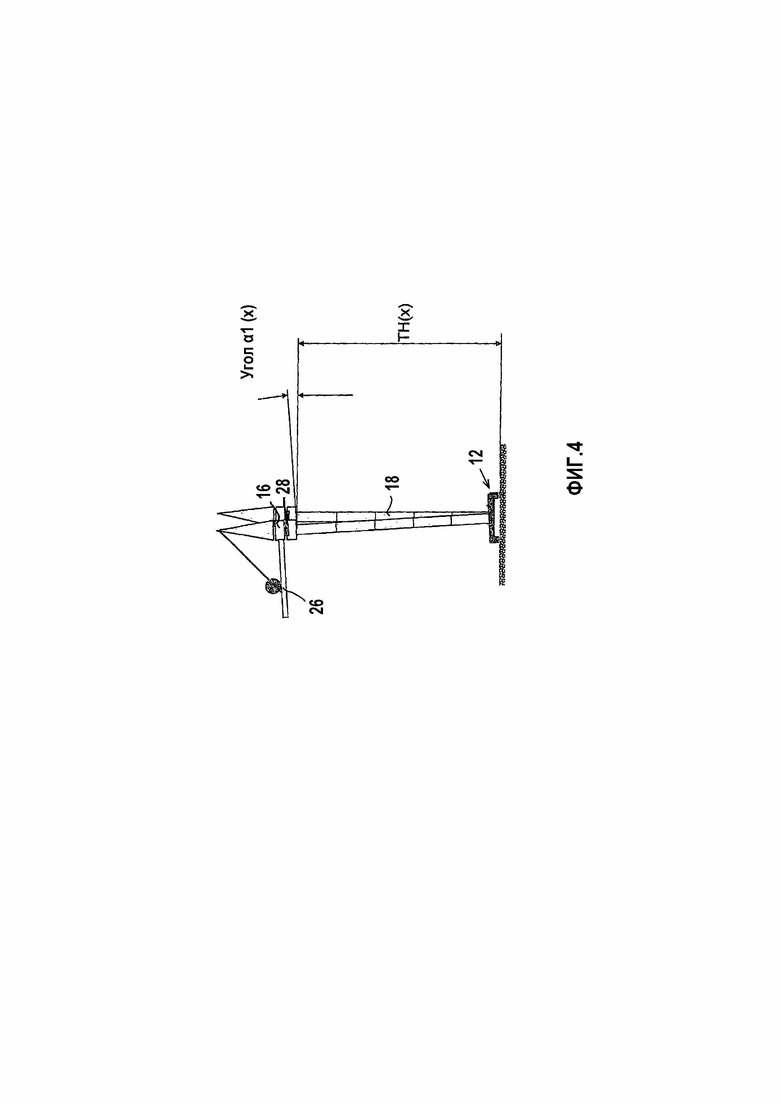
фиг.4: упрощенный схематичный вид сбоку башенного поворотного крана, со смонтированной консолью противовеса;
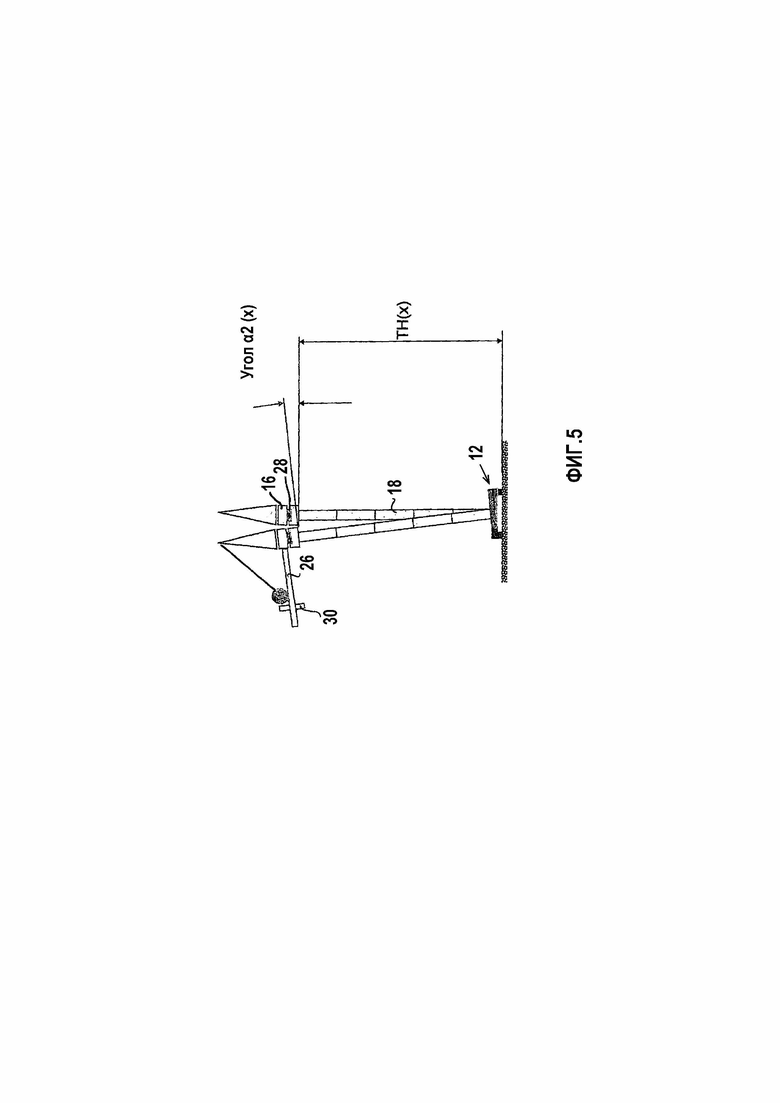
фиг.5: упрощенный схематичный вид сбоку башенного поворотного крана, с монтажным противовесом,
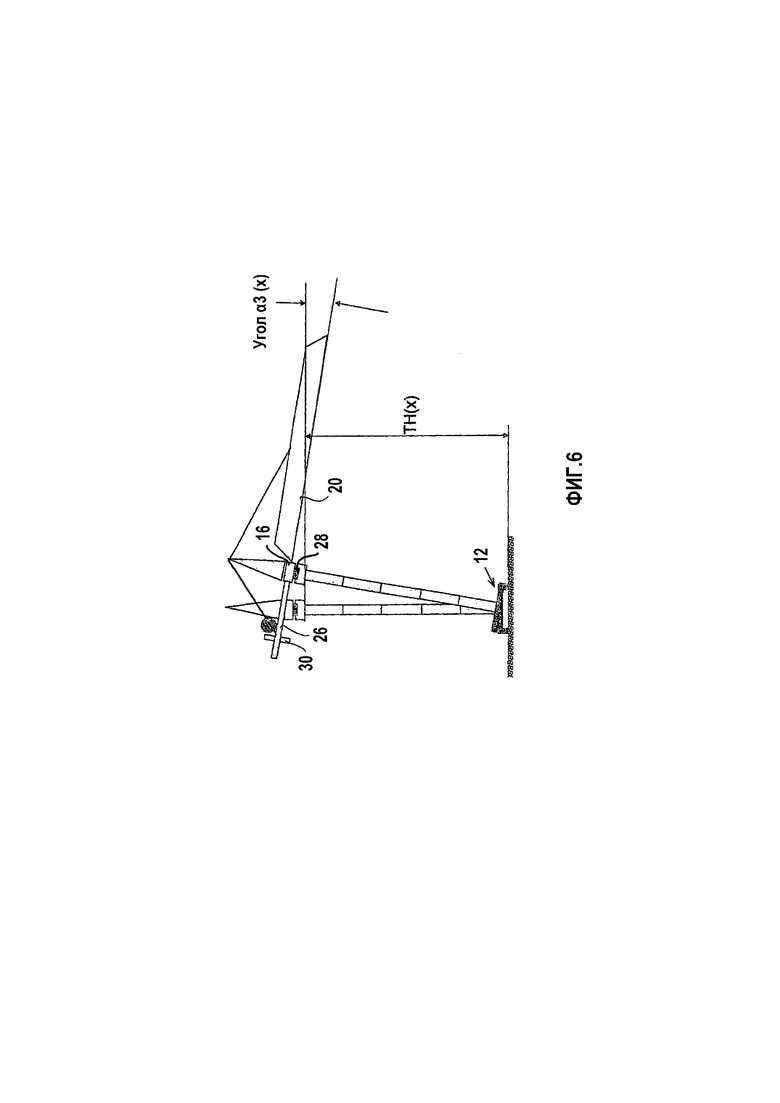
фиг.6: упрощенный схематичный вид сбоку башенного поворотного крана, со смонтированной стрелой;
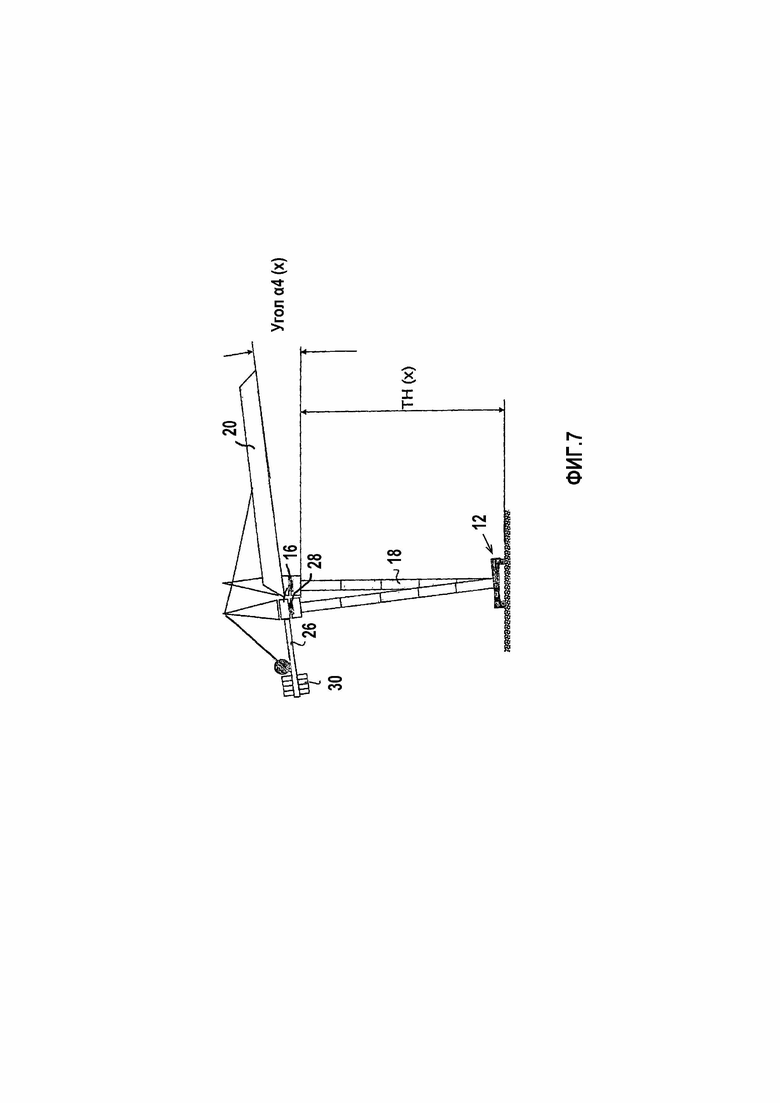
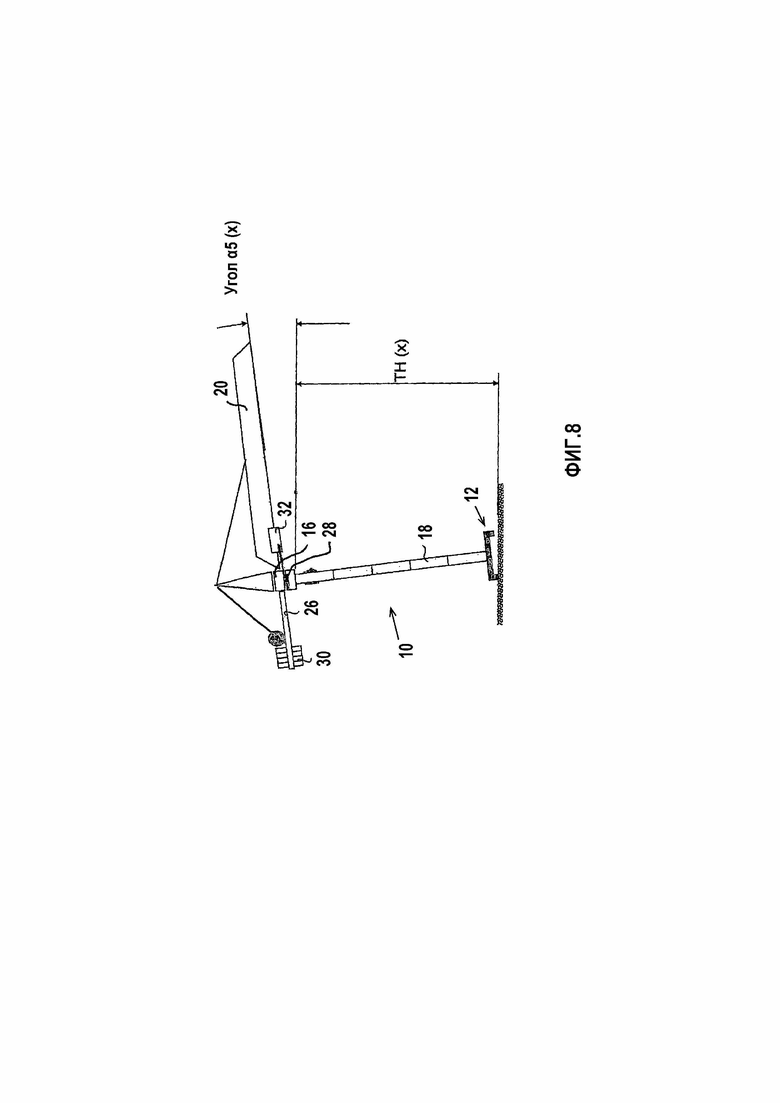
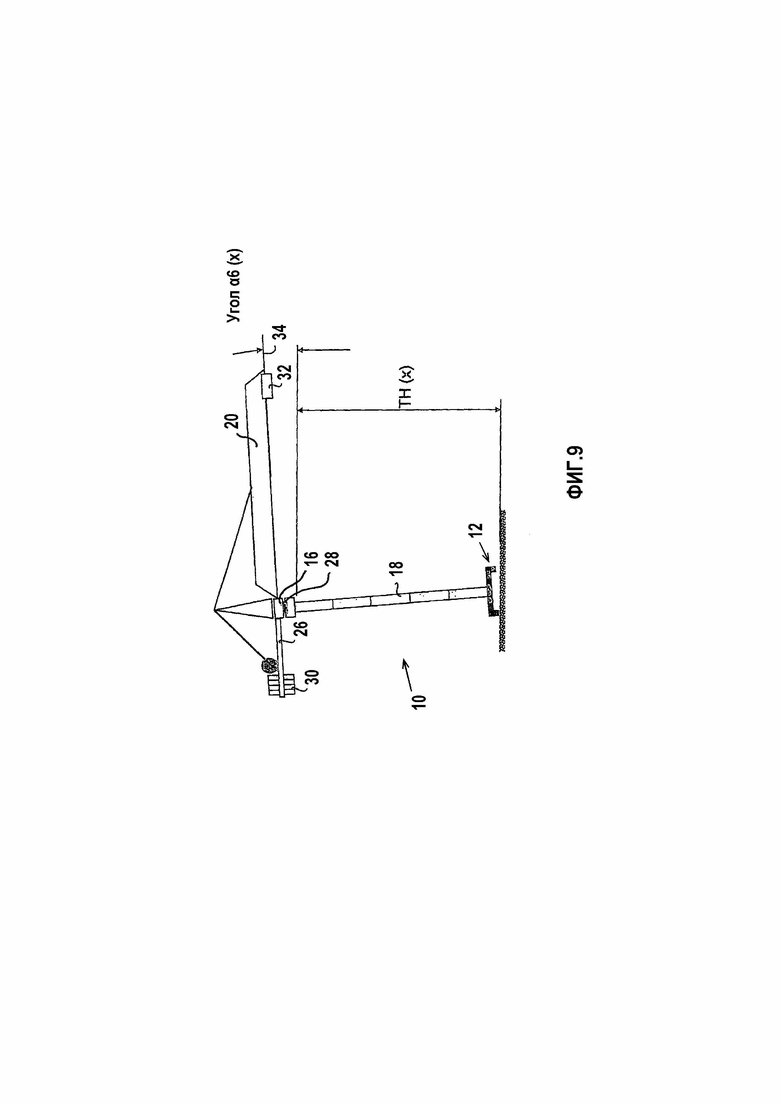
фиг.7-9: упрощенный схематичный вид сбоку башенного поворотного крана, с укомплектованным противовесом и смонтированной грузовой тележкой на башне, а также на конце стрелы;
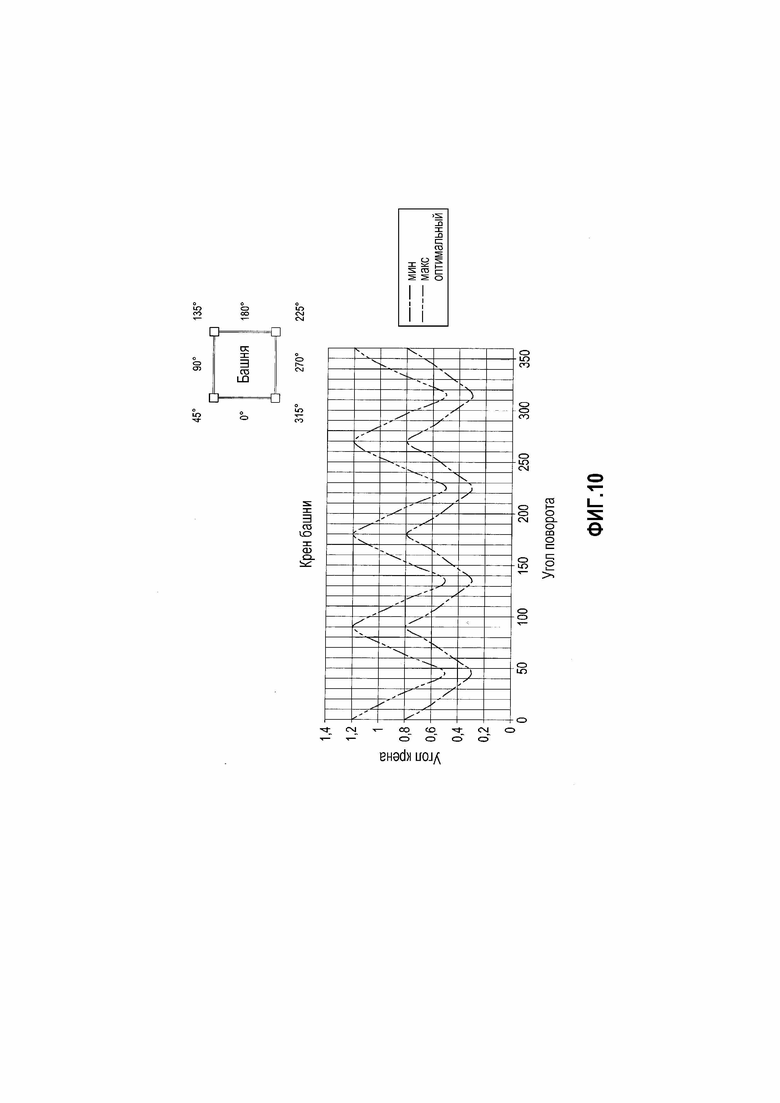
фиг.10: графическое изображение кривой угла, составленной при контроле крена, и
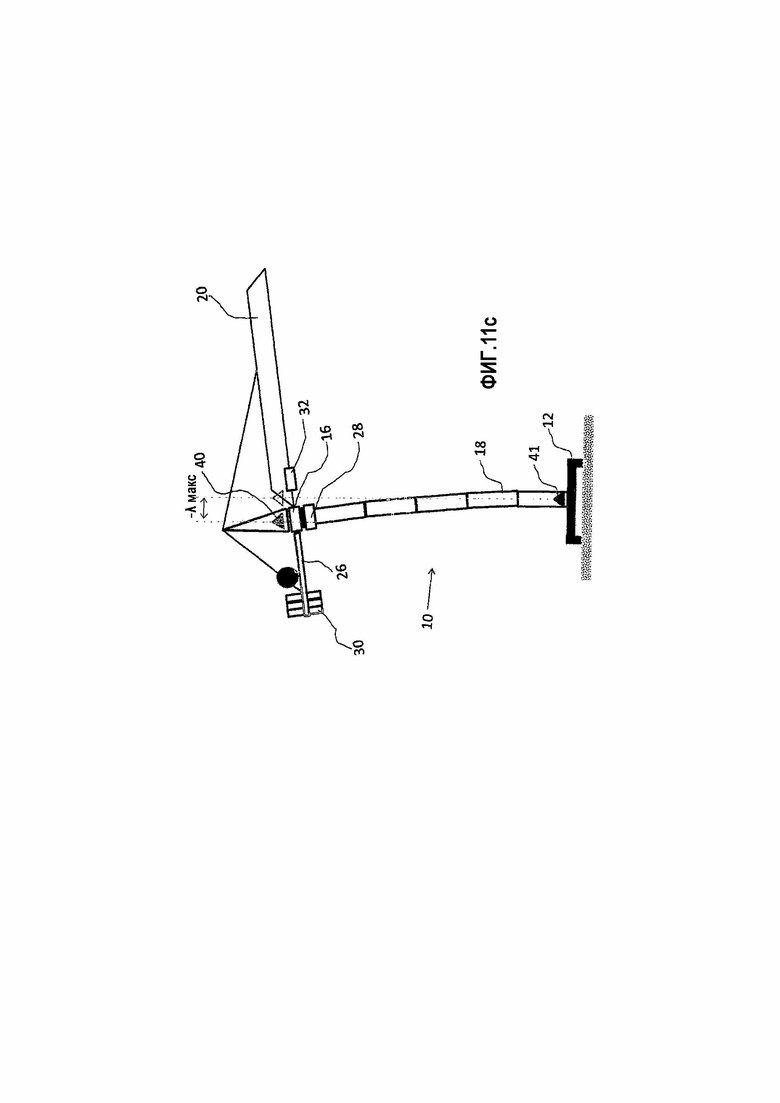
фиг.11a-c: упрощенный схематичный вид сбоку башенного поворотного крана по второму варианту осуществления изобретения.
На фиг.1 показан упрощенный схематичный вид сбоку башенного поворотного крана 10 (здесь в виде башенного поворотного крана с нижним расположением поворотного устройства), имеющего основание 12, а также поворотную башню 14, которая имеет поворотную платформу 16. Кроме того, кран 10 имеет башню 18, а также закрепленную на башне 18 стрелу 20. На стреле 20 находится не изображенная подробно грузовая тележка, имеющая грузовой крюк, на котором висит груз 22. Грузовая тележка скользит в горизонтальном направлении, которое изображено стрелкой 24, по стреле 20. Кроме того, кран 10 имеет консоль 26 противовеса.
Предлагаемая изобретением система контроля устойчивости башенного поворотного крана 10 имеет сенсорику и не изображенное здесь подробно управление крана. На поворотной платформе 16 встроен имеющий очень точную разрешающую способность сенсор 28 крена, таким образом, что может легко определяться положение поворотной платформы 16.
Фактический контроль в соответствии с изобретением начинается еще при возведении крана 10, при этом собственно известным образом сначала монтируется основание 12 и мачта или башня 18, и только потом устанавливается поворотная платформа 16 с уже встроенным сенсором 29 крена. Сенсор 28 крена показывает положение поворотной платформы 16. Если крен поворотной платформы больше, чем предусмотренный для этой высоты башни, монтажник информируется, и полученные и оцененные данные затем протоколируются.
На фиг.2 и 3 показан упрощенный схематичный вид крана 10 (здесь в виде башенного поворотного крана с верхним расположением поворотного устройства), имеющего поворотную платформу 16 и башню 18. Крен поворотной платформы 16 определяется по углу α(x), как показано на фиг.2 и 3, в зависимости от высоты башни/башенной комбинации TH(x), с помощью сенсора 28 крена и сравнивается с сохраненными в памяти управления крана допустимыми значениями крена. Если крен находится в допустимых пределах, возведение крана продолжается. Но если крен поворотной площадки будет больше, чем предусмотренный для данной конструкции (высоты башни), подается предупреждающий сигнал, так что монтажник немедленно информируется, и дальнейшее возведение крана прерывается. Затем после корректировки возведение продолжается. Могут быть также предусмотрены несколько сенсоров крена.
На фиг.4 показаны следующие шаги монтажа, а именно, монтаж консоли 26 противовеса. При этом консоль 26 противовеса и подъемная лебедка создают момент, который в результате, во взаимосвязи с высотой башни, впоследствии приводит к крену. Крен определяется с помощью сенсора 28 крена, при этом угол α1(x) протоколируется. Если угол α1(x) больше, чем некоторый допустимый угол, подается предупреждающий сигнал. При этом должен также применяться сенсор угла поворота для определения крена башни, зависящего от положения. Тогда картина крена поворачивается на 360° и отображается полностью во взаимосвязи с анемометрией.
Если допустимый крен не был превышен, следует разрешение на укладку монтажного противовеса 30, как изображено на фиг.5. При этом снова определяется угол α2(x) в зависимости от высоты башни/башенной комбинации (x) и сравнивается с сохраненными в памяти значениями.
После этого монтируется стрела 20, как показано на фиг.6, и по углу α3(x) определяется крен. Этот угол хотя и больше по сравнению с углом α2(x), однако допустимый, а также необходимый крен подтверждает, что противовес подходит к длине смонтированной стрелы. Крен еще раз записывается для протоколирования промежуточного шага.
На фиг.7 показана грузовая тележка в положении монтажа. При этом комплектуется противовес 30 и определяется угол α4(x). Кран поворачивается на 360° для подтверждения надежности кренов для установленной конфигурации крана. Это может осуществляться с грузовой тележкой 32 на башне, как показано на фиг.8, и/или с грузовой тележкой 32 на конце 34 стрелы, как показано на фиг.9. При этом определяются соответственно угол α5(x) и α6(x) и сравниваются с допустимыми углами.
Как изображено на фиг.10, составляется кривая угла, при контроле которой крены сравниваются с текущими нагрузками. Затем протоколируются возможные отклонения. При этом последовательность действий аналогична для всех функций. Определяется угол крена, причем в зависимости от положения относительно башни, и используется функция «макс. и мин.», т.е. установка некоторого интервала как предела для предупреждений, соответственно, отключений.
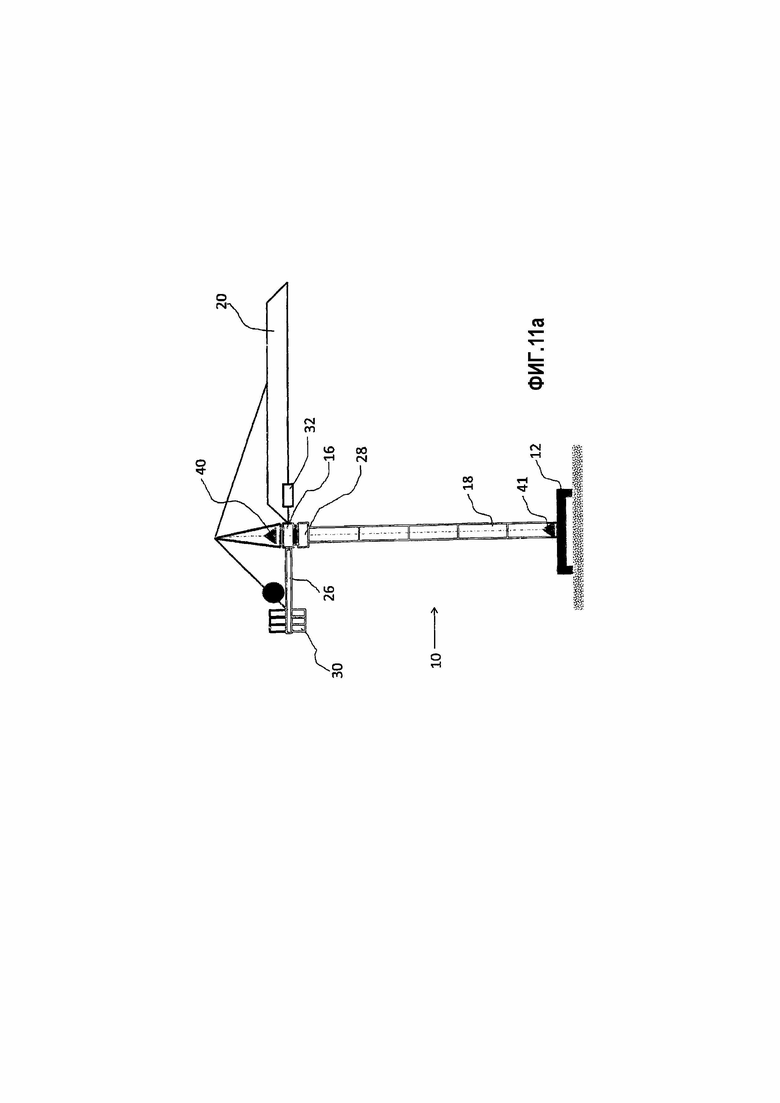
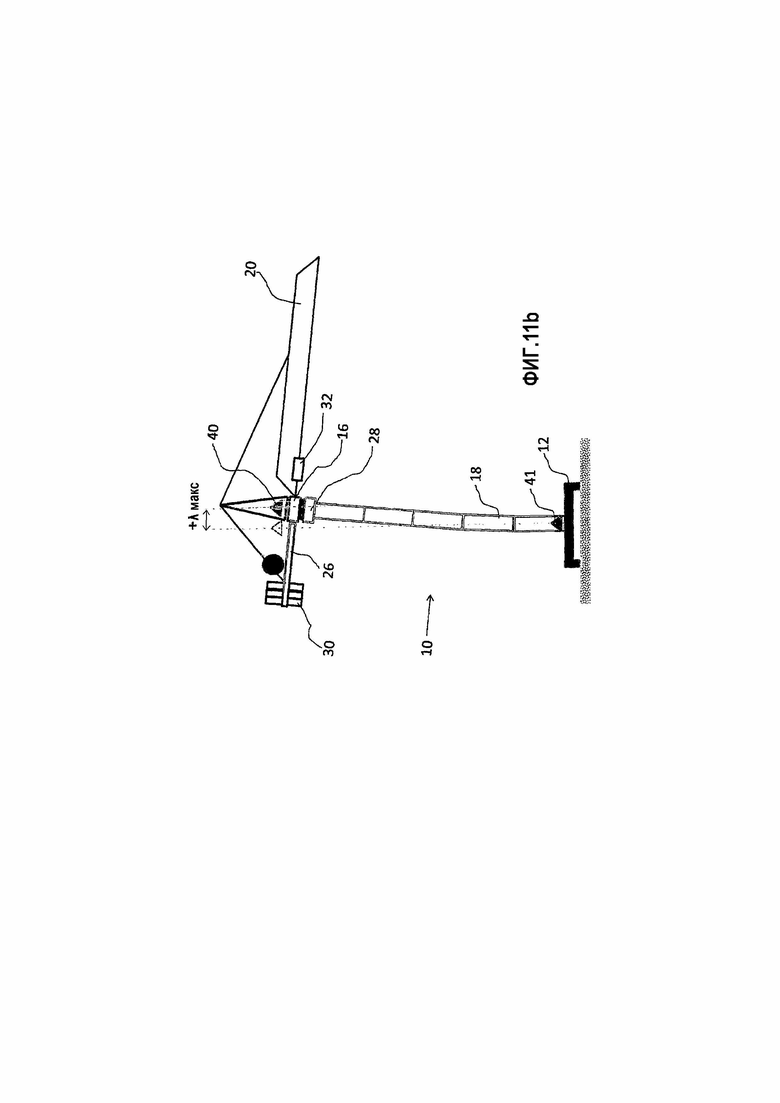
На фиг.11a-c изображен соответственно второй вариант осуществления предлагаемого изобретением башенного поворотного крана. Одинаковые ссылочные обозначения имеют то же значение, что и ссылочные обозначения в варианте осуществления, рассмотренном ранее. В этом варианте осуществления речь идет о башенном кране 10 с верхним расположением поворотного устройства, у которого стрела 20 опирается с возможностью вращения на верхний конец башни 18. Сенсор 20 крена расположен вблизи поворотной платформы 16.
В изображенном здесь варианте осуществления дополнительно к сенсору 28 крена или вместо сенсора 28 крена крен может осуществляться с помощью пары GPS-транспондеров 40 и 41. В то время как GPS-транспондер 40 расположен на вершине башни 18, второй GPS-транспондер 41 расположен на основании или опоре, соответственно, нижней части крана 10. Разность GPS-сигналов двух транспондеров позволяет определять крен из исходного положения, как показано с помощью фиг.11a (исходное положение без крена), 11b (отклонение в одном направлении) и 11c (отклонение в другом направлении).
| название | год | авторы | номер документа |
|---|---|---|---|
| БАШЕННЫЙ КРАН | 2006 |
|
RU2307783C1 |
| БАШЕННЫЙ КРАН | 2003 |
|
RU2249559C1 |
| Башенный кран | 1982 |
|
SU1031885A1 |
| БАШЕННЫЙ КРАН | 2011 |
|
RU2492132C2 |
| Башенный кран-манипулятор | 1987 |
|
SU1414760A1 |
| ПРИСТАВНОЙ БАШЕННЫЙ КРАН | 1997 |
|
RU2118289C1 |
| СКЛАДНОЙ БАШЕННЫЙ КРАН | 2023 |
|
RU2817662C1 |
| БАШЕННЫЙ КРАН И СПОСОБ ЕГО МОНТАЖА | 2008 |
|
RU2371374C1 |
| БАШЕННЫЙ КРАН | 2019 |
|
RU2754013C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
Предложен способ контроля башенного поворотного крана, имеющего поворотную платформу. Кран (10) имеет сенсорику и управление крана, причем также предусмотрен по меньшей мере один сенсор крена. Сенсор крена устанавливают и встраивают на поворотной платформе башенного поворотного крана (10). Контроль безопасности крана (10) осуществляют во время возведения, соответственно, разборки башенного поворотного крана (10). Предложена также система для контроля безопасности крана. Достигается обеспечение устойчивости крана во время возведения, соответственно, разборки, а также во время всей эксплуатации, существенное улучшение качества производимой работы. 2 н. и 13 з.п. ф-лы, 13 ил.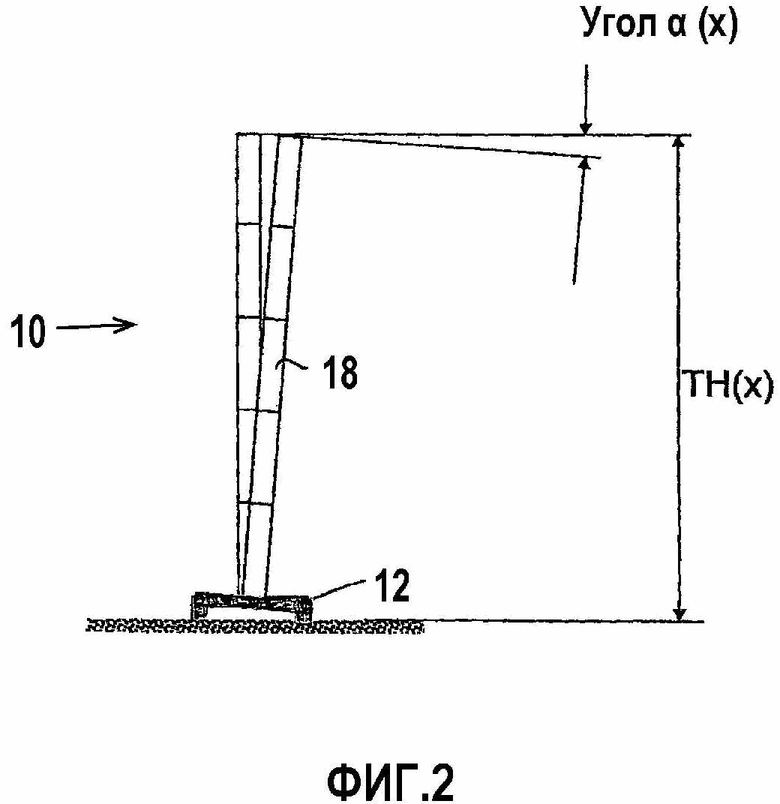
1. Способ контроля безопасности крана, в частности башенного поворотного крана, имеющего поворотную платформу, причем этот кран имеет сенсорику и управление крана и причем также предусмотрен по меньшей мере один сенсор крена,
отличающийся тем,
что указанный по меньшей мере один сенсор крена устанавливают и встраивают на поворотной платформе башенного поворотного крана и что контроль безопасности крана осуществляют по меньшей мере во время возведения, соответственно, разборки башенного поворотного крана.
2. Способ по п. 1, отличающийся тем, что с помощью указанного по меньшей мере одного сенсора крена определяют положение поворотной платформы и полученные результаты измерения передают для оценки в управление крана, причем при превышении заданного предельного значения активируют соответствующее мероприятие.
3. Способ по п. 1 или 2, отличающийся тем, что возведение крана начинают с монтажа его основания и башни и на них устанавливают поворотную платформу, имеющую встроенный по меньшей мере один сенсор крена, при этом контроль начинают после установки поворотной платформы.
4. Способ по одному из предыдущих пунктов, отличающийся тем, что через значения, определенные посредством указанного по меньшей мере одного сенсора крена, крен поворотной платформы сравнивают со значениями крена, предусмотренными для данной конструкции, причем при превышении допустимого крена, в частности допустимого угла крена, подают предупреждающий сигнал, причем определенные данные протоколируют.
5. Способ по одному из предыдущих пунктов, отличающийся тем, что корректировку данных, определенных с помощью указанного по меньшей мере одного сенсора крена, предпринимают во взаимосвязи со значениями, определенными с помощью предусмотренного анемометра, так чтобы давалось разрешение на следующие шаги монтажа.
6. Способ по одному из предыдущих пунктов, отличающийся тем, что крен получается из момента, создаваемого консолью противовеса и подъемной лебедкой, и в зависимости от высоты башни башенного поворотного крана после монтажа консоли противовеса, причем получающийся из этого крен определяют с помощью указанного по меньшей мере одного сенсора крена и сравнивают с данными, сохраненными в управлении крана.
7. Способ по одному из предыдущих пунктов, отличающийся тем, что дополнительно к указанному по меньшей мере одному сенсору крена предусмотрен сенсор угла поворота для определения зависящего от положения крена башни, причем после этого осуществляют разрешение для укладки монтажного противовеса.
8. Способ по одному из предыдущих пунктов, отличающийся тем, что крен, в частности угол α(x) крена, определяют после монтажа стрелы и записывают для протоколирования промежуточного шага.
9. Способ по одному из предыдущих пунктов, отличающийся тем, что в следующем шаге способа комплектуется противовес, при этом правильность допустимых кренов для установленной конфигурации крана подтверждают путем полного поворота возведенного таким образом крана на 360° и при этом поворот может осуществляться со встроенной грузовой тележкой на башне и/или с грузовой тележкой на конце стрелы.
10. Способ по одному из предыдущих пунктов, отличающийся тем, что кран после комплектации противовеса поворачивается на 360° для подтверждения правильности кренов для установленной конфигурации.
11. Способ по одному из предыдущих пунктов, отличающийся тем, что контроль с помощью указанного по меньшей мере одного сенсора крена осуществляется не только при возведении, но и при разборке стрелы и/или консоли противовеса, так что при превышении допустимых значений крена подается предупреждающий сигнал.
12. Способ по одному из предыдущих пунктов, отличающийся тем, что крены, которые записываются в управлении крана, в виде кривой нагрузки сравнивают с текущими моментами нагрузки, при этом протоколируют возможные отклонения.
13. Способ по одному из предыдущих пунктов, отличающийся тем, что угол крена в зависимости от момента нагрузки/опорного момента и угол поворота крана во время эксплуатации постоянно контролируется, при этом отображаются отклонения от допустимых сохраненных значений.
14. Способ по одному из предыдущих пунктов, отличающийся тем, что крен контролируется во время процесса самоподъема при возведении, соответственно, разборке башенного поворотного крана.
15. Система для контроля безопасности крана, в частности башенного поворотного крана, с поворотной платформой, причем эта система имеет сенсорику и управление крана и при этом предусмотрен по меньшей мере один установленный и встроенный на поворотной платформе сенсор крена для контроля безопасности во время возведения, соответственно, разборки башенного поворотного крана и/или во время эксплуатации возведенного крана.
| СПОСОБ АНАЛИЗА КЛЕТОК И АНАЛИЗАТОР КЛЕТОК | 2021 |
|
RU2839419C1 |
| Способ лечения рубцовых изменений кожи кисти | 1986 |
|
SU1491486A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

