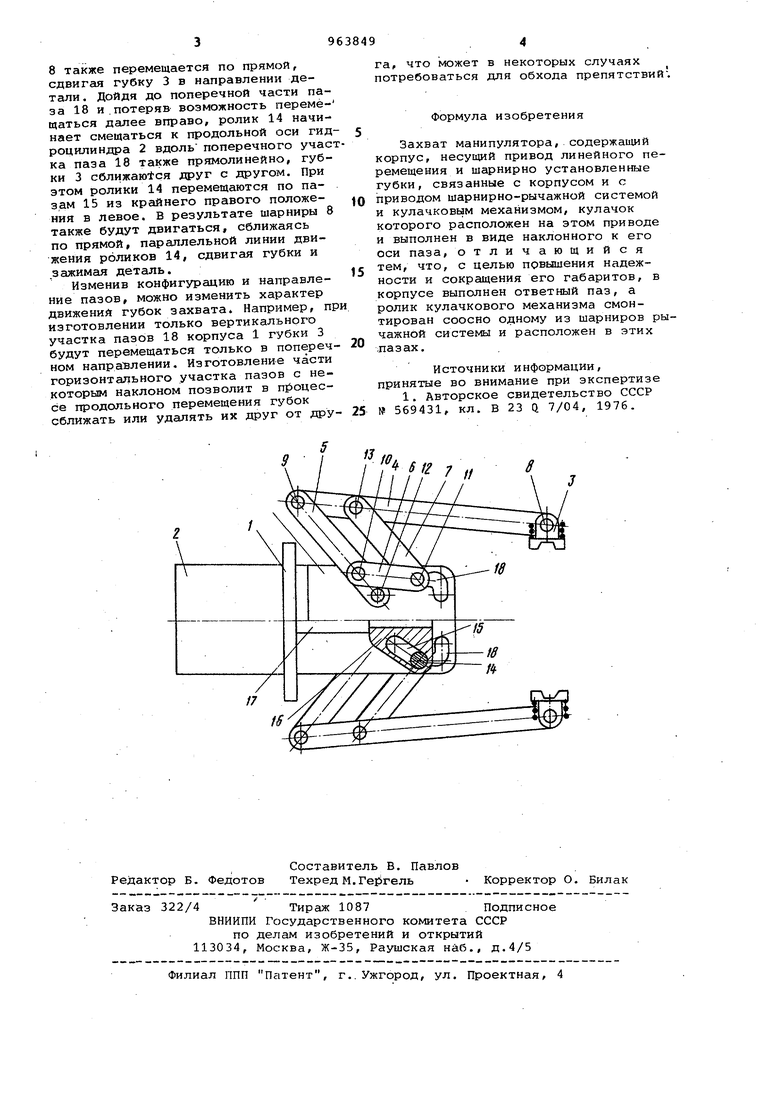
(54) ЗАХВАТ МАНИПУЛЯТОРА Изобретение относится к машиностроению, а именно, к захватам манипуляторов, механизации и автоматизации технологических процессов Известен -захват манипулятора, содержащий корпус, несущий привод лине ного перемещения и шарнирно установленные губки, связанные с приводом и с корпусом шарнирно-рычажной системо и кулачковым механизмом, кулачок которого расположен на этом приводе и выполнен в виде наклонного к его оси паза l. Этот захват недостаточно надежен особенно при работе с тяжелыми деталями, и имеет большие габариты. Цель изобретения - повьпиение надежности и сокращение габаритов устройства. Указанная цель достигается тем, что в корпусе выполнен ответный паз а ролик кулачкового механизма смонтирован соосно одному из шарниров рычажной системы и расположен в этих пазах. На чертеже изображен общий вид захвата. Захват состоит из корпуса 1, несущего привод линейного перемещения например силовой гидроцилиндр 2, и шарнирно установленные губки 3, связанные с корпусом и с приводом шарнирно-рычажной системой, именмцей звенья 5-7, образующие при их соединении шарниры 8-13, представляющей собой механизм пантографа, и кулачковым механизмом, ролик 14 которого смонтирован соосно шарниру 11 шарнирно-рычажной системы и расположен в наклонном пазу 15. Кулачок 16 этого механизма расположен на штоке 17 гидроцилиндра 2, а ролик 14 - в выполненном в корпусе 1 пазу 18, имеющем продольный и поперечный участки, соответствующие наклонному пазу 15. Захват работает следующим образом. При подаче давления в штоковую полость гидроцилиндра 2 шток 17 смещается вправо, сдвигая вправо кулачок 16. Так как ролик 14 помещен одновременно в пазу 15 кулачка 16 и в пазу 18 корпуса 1, он при движении кулачка 16 вправо, оставаясь в крайнем правом положении в пазу 15, смещается по прямой.вправо вдоль продольного участка паза 18. Вследствие того, что центры шарниров 9, 8, 13 лежат на одной прямой, шарнир
8 также перемещается по прямой, сдвигая губку 3 в направлении детали. Дойдя до поперечной части паза 18 и потеряв возможность перемёщаться далее вправо, ролик 14 начинает смещаться к продольной оси гидроцилиндра 2 вдоль поперечного участка паза 18 также прямолинейно, губки 3 сближаются друг с другом. При этом ролики 14 перемещаются по пазам 15 из крайнего правого положения в левое. В результате шарниры 8 также будут двигаться, сближаясь по прямой, параллельной линии движения роликов 14, сдвигая губки и .зажимая деталь.
Изменив конфигурацию и направление пазов, можно изменить характер движений губок захвата4 Например, пр изготовлении только вертикального участка пазов 18 корпуса 1 губки 3 будут перемещаться только в поперечном направлении. Изготовление части горизонтального участка пазов с некоторым наклоном позволит в П13оцессе продольного перемещения губок сближать или удалять их друг от друга, что может в некоторых случаях потребоваться для обхода препятствий;
Формула изобретения
Захват манипулятора, содержащий корпус, несущий привод линейного перемещения и шарнирно установленные губки, связанные с корпусом и с приводом шарнирно-рычажной системой и кулачковым механизмом, кулачок которого расположен на этом приводе и выполнен в виде наклонного к его оси паза, отли ч ающи и ся тем, что, с целью повышения надежности и сокращения его габаритов, в корпусе выполнен ответный паз, а ролик кулачкового механизма смонтирован соосно одному из шарниров рчажной системы и расположен в этих лазах.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 569431, кл. В 23 Q 7/04, 1976.
8
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1978 |
|
SU768633A1 |
| Захват | 1977 |
|
SU667396A1 |
| Захват | 1977 |
|
SU663577A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Захватное устройство | 1977 |
|
SU662342A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
| Захват манипулятора | 1977 |
|
SU691290A1 |
| Клепальный станок | 1975 |
|
SU526432A1 |
| Устройство для соединения концов обвязочного материала | 1982 |
|
SU1076359A1 |
