(21)4282393/31-08
(22)29,05.87
(46) 23.12.89. Ьюл. № 47
(71)Кустанайскнн дизельный завод
(72)В.П. Волокитин
(53)621.229.7 (088.8)
(56)Авторское свидетельство СССР № 1093540, кл. В 25 J 11/00, 1983.
(54)МАНИПУЛЯТОР
(57)Изобретение относится к машиностроению и может быть использовано в
,конструкциях манипуляторов. Целью
изобретения является увеличение зоны обслуживания манипулятора путем увеличения выпета руки. В начале работы от штока 14 силового цилиндра 1 перемещается общий шарнир 13 наибольшей пары 2 рычагов 4 влево. При этом цилиндрические опоры 23 скользят по наклонным пазам 18 и рычаги 4 вместе со схватом 24 тоже перемещаются, рычаги 4 складываются и схват 24 перемещается в обратном направлении. 1 ил.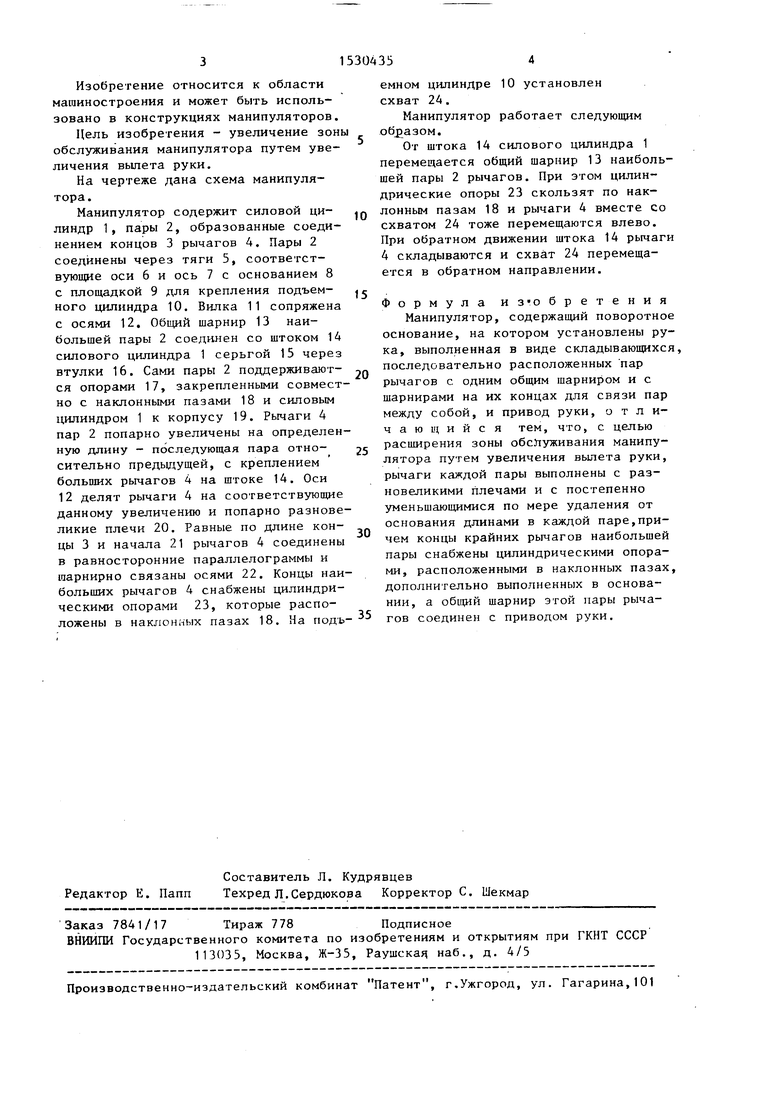
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Механическая рука | 1978 |
|
SU738863A1 |
| Промышленный робот | 1983 |
|
SU1127766A1 |
| Манипулятор | 1977 |
|
SU707792A1 |
| ШТАТИВ | 1997 |
|
RU2117339C1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов. Целью изобретения является увеличение зоны обслуживания манипулятора путем увеличения вылета руки. В начале работы от штока 14 силового цилиндра 1 перемещается общий шарнир 13 наибольшей пары 2 рычагов 4 влево. При этом цилиндрические опоры 23 скользят по наклонным пазам 18 и рычаги 4 вместе со схватом 24 тоже перемещаются, рычаги 4 складываются и схват 24 перемещается в обратном направлении. 1 ил.
2
(Л
ел
со
о
4
00
ел
Изобретение относится к области машиностроения и может быть использовано в конструкциях манипуляторов.
Цель изобретения - увеличение зон обслуживания манипулятора путем увеличения вылета руки.
На чертеже дана схема манипулятора .
Манипулятор содержит силовой цилиндр 1, пары 2, образованные соединением концов 3 рычагов 4. Пары 2 соединены через тяги 5, соответствующие оси 6 и ось 7 с основанием 8 с площадкой 9 для крепления подъемного цилиндра 10. Вилка 11 сопряжена с осями 12. Общий шарнир 13 наибольшей пары 2 соединен со штоком 14 силового цилиндра 1 серьгой 15 через втулки 16. Сами пары 2 поддерживаются опорами 17, закрепленными совместно с наклонными пазами 18 и силовым цилиндром 1 к корпусу 19. Рычаги 4 пар 2 попарно увеличены на определенную длину - последующая пара относительно предыдущей, с креплением больших рычагов 4 на штоке 14. Оси 12 делят рычаги 4 на соответствующие данному увеличению и попарно разновеликие плечи 20. Равные по длине концы 3 и начала 21 рычагов 4 соединены в равносторонние параллелограммы и шарнирно связаны осями 22. Концы наибольших рычагов 4 снабжены цилиндрическими опорами 23, которые расположены в наклонных пазах 18. На под ь
0
5
0
5
0
емном цилиндре 10 установлен схват 24.
Манипулятор работает следующим образом.
От штока 14 силового цилиндра 1 перемещается общий шарнир 13 наибольшей пары 2 рычагов. При этом цилиндрические опоры 23 скользят по наклонным пазам 18 и рычаги 4 вместе со схватом 24 тоже перемещаются влево. При обратном движении штока 14 рычаги 4 складываются и схват 24 перемещается в обратном направлении.
Формула и з о бретения
Манипулятор, содержащий поворотное основание, на котором установлены рука, выполненная в виде складывающихся, последовательно расположенных пар рычагов с одним общим шарниром и с шарнирами на их концах для связи пар между собой, и привод руки, отличающийся тем, что, с целью расширения зоны обслуживания манипулятора путем увеличения вылета руки, рычаги каждой пары выполнены с разновеликими плечами и с постепенно уменьшающимися по мере удаления от основания длинами в каждой паре,причем концы крайних рычагов наибольшей пары снабжены цилиндрическими опорами, расположенными в наклонных пазах, дополнительно выполненных в основании, а общий шарнир этой пары рычагов соединен с приводом руки.
