Фиг. 2
Изобретение относится к машиностроению, в частности к манипуляторам и промьппленным роботам для автоматизации загрузки изделий в технологическое оборудование.
Цель изобретения - повышение точности позиционирования за счет увеличения жесткости передаточного механизма.
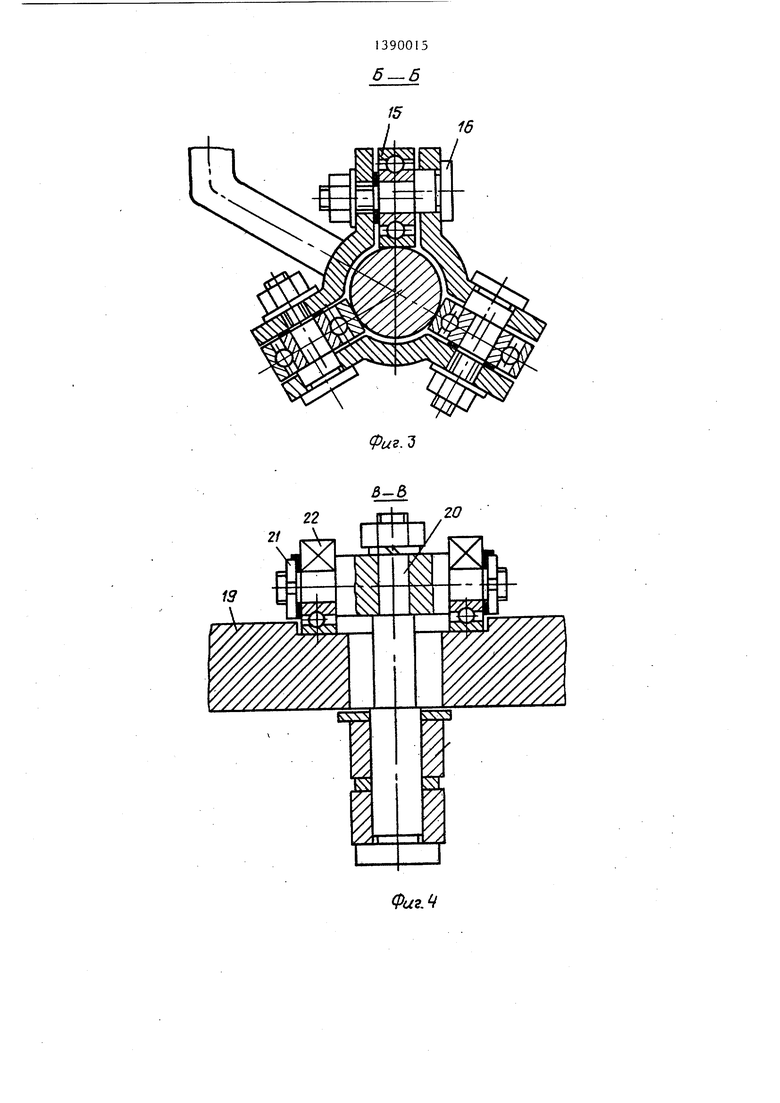
На фиг.1 показан манипулятор, общий вид; на фиг.2 - вид А на фиг.1; на фиг.3 - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.1.
Манипулятор состоит из основания
Iс цилиндрическими направляющими, на котором установлен двигатель 2, посредством шарниров 3 связанный с передаточным механиз юм, выполненным в виде пантографа 4, звенья которого с помощью среднего 5 и крайних
6 шарниров и шарнира 7 связаны с кареткой 8, на котрой установлена механическая рука 9, которая имеет механизмы вьщвижения 10 и вращения
IIзахвата 12 и его привод 13.
На каретку 8 смонтированы опорные узлы 14 с подшипниками 15, которые установлены на эксцентричньрс осях 16, и упор 17. На основании 1 смонтированы регулируемый упор 18 °и кронштейн 19, который выполнен в виде плоской направляющей, установленной вдоль линии перемещения среднего шарнира пантографа. Шарнир 5 состоит из оси 20, на которой закреплена поперечина 21 с подшипниками
0
5
0
22 и на которую опираются звенья
пантографа.
Манипулятор работает следующим образом.
При включении двигателя 2 шарниры 3 начинают перемещаться вдоль его оси. При этом через звенья пантографа 4 осуществляется перемещение каретки 8 с механической рукой 9 в заданное упором 18 положение. Зазоры в направляющих регулируются с помощью эксцентричных осей 15, а провис шарнирно-рычажной системы пантографа устраняется с помощью направляющей 19, на которую опирается шарнир 5.
Формула изобретения
Манипулятор, содержащий основание с направляющими, в которых смонтирована каретка с механической рукой, и привод,состоящий из двигателя и передаточного механизма, отличающийся тем, что, с целью по- вьш1ения точности позиционирования за счет увеличения жесткости передаточного механизма, он выполнен в вит де пантографа, крайние звенья которого шарнирно связаны с двигателем привода и кареткой, при этом основа- ние снабжено дополнительной направляющей, а один из средних шарниров пантографа снабжен опорой качения, взаимодействующей с этой направляющей ,
б -б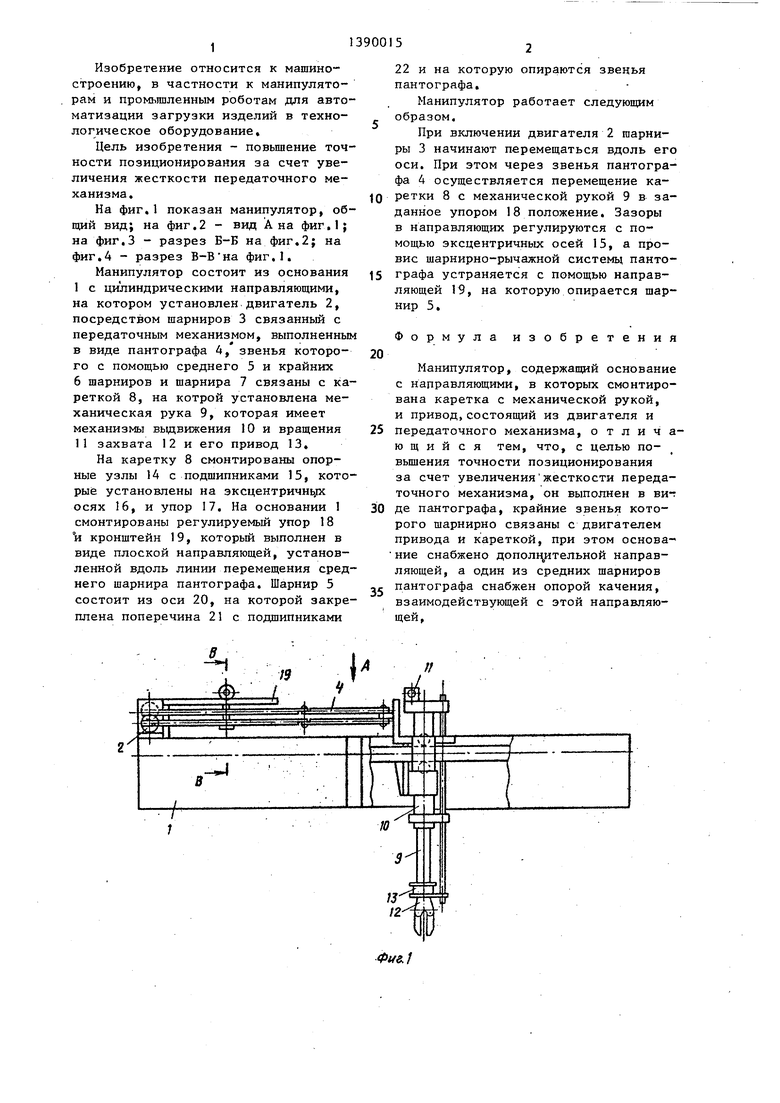
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1364467A1 |
| Уравновешенный манипулятор | 1986 |
|
SU1400874A1 |
| Промышленный робот | 1984 |
|
SU1268252A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Сбалансированный манипулятор | 1987 |
|
SU1423367A1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1301531A1 |
Изобретение относится к машиностроению, в частности к манипуляторам и промьшшенным роботам Дhя автоматизации загрузки изделий в технологическое оборудование. Цель изобретения - повышение точности позиционирования за счет увеличения жесткости передаточного механизма. При включении двигателя 2 звенья пантографа 4 перемещают каретку 8 с механической рукой в заданное положение. Провис рычажной системы пантографа устраняется с помощью направляющей 19, на которую опирается шарнир 5. 4 ил.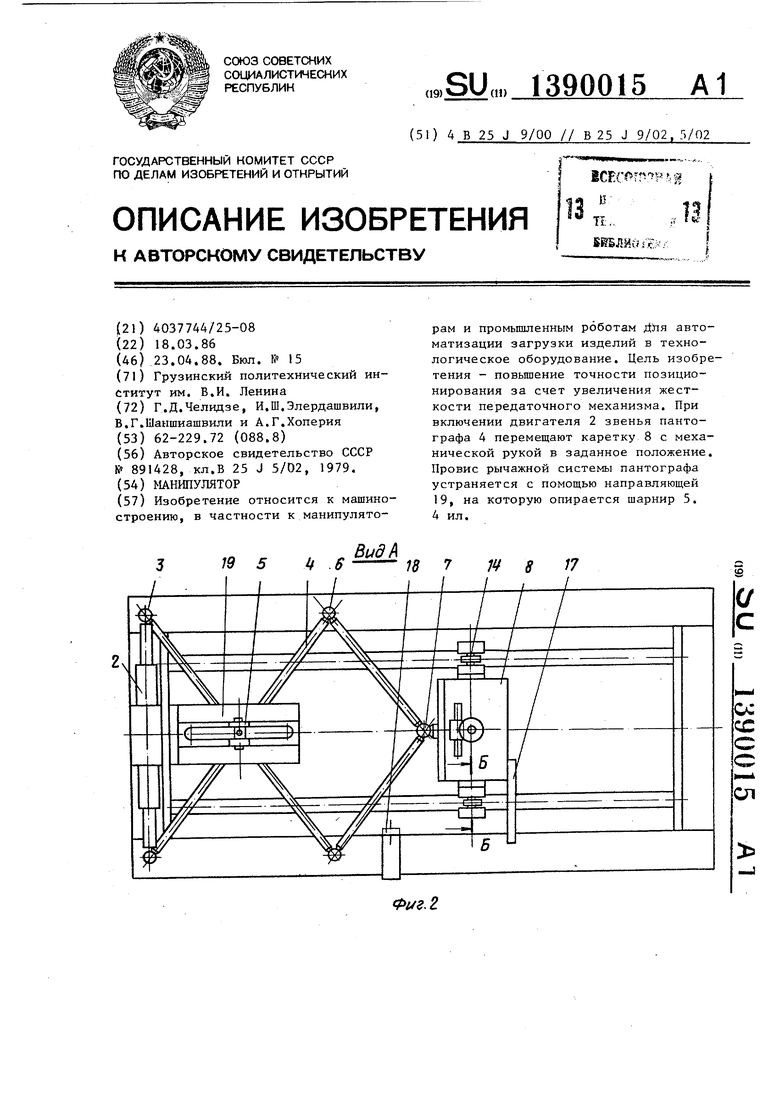
Фиг. З
20
| Манипулятор | 1979 |
|
SU891428A1 |
