Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу определения пешеходов и устройству определения, которое оснащено камерой и радаром в качестве датчиков распознавания внешнего окружения и которое определяет то, что пешеход присутствует в позиции переднего направления рассматриваемого транспортного средства в ходе движения.
Уровень техники
[0002] Из предшествующего уровня техники известно автоматическое тормозное устройство, в котором объект, присутствие которого подтверждается посредством камеры из данных, которые выводятся из радарного устройства, определяется в качестве помехи, и время вывода автоматического торможения изменяется согласно типу помехи (например, см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент (Япония) № 2009-214764
Сущность изобретения
Задача, решаемая изобретением
[0004] Тем не менее, в традиционном устройстве, описанном выше, объект, присутствие которого подтверждается посредством камеры, определяется в качестве помехи после того, как радарное устройство выводит данные. Следовательно, когда радарное устройство выводит множество объектов в качестве данных, необходимо распознавать каждую из форм множества объектов для того, чтобы определять типы помех. Следовательно, если пешеход включен во множество объектов, необходимо распознавать каждую из форм множества объектов и затем распознавать пешехода из числа объектов, определенных в качестве помех, так что имеется проблема в том, что определение пешеходов требует времени.
[0005] В свете проблем, описанных выше, задача настоящего изобретения заключается в том, чтобы предоставлять способ определения пешеходов и устройство определения, в которых скорость реакции при определении пешеходов повышается при определении пешехода с использованием камеры и радара в ходе движения.
Средство достижения цели
[0006] Чтобы решать задачу, описанную выше, настоящее изобретение содержит датчики распознавания внешнего окружения, которые получают информацию переднего направления рассматриваемого транспортного средства, и который использует датчики распознавания внешнего окружения для того, чтобы определять то, что пешеход присутствует в позиции переднего направления рассматриваемого транспортного средства.
Камера и радар предоставляются в качестве датчиков распознавания внешнего окружения.
Когда возможный вариант пешехода обнаруживается в позиции переднего направления рассматриваемого транспортного средства на основе сигнала изображения из камеры, область для определения совпадения задается с позицией обнаруженного возможного варианта пешехода в качестве центральной точки.
Когда позиция объекта, ближайшего к возможному варианту пешехода, из множества объектов, обнаруженных посредством отраженных волн из радара, присутствует в области для определения совпадения, и совпадение установлено, возможный вариант пешехода определяется в качестве пешехода.
Область для определения совпадения расширена, когда позиция возможного варианта пешехода и позиция объекта находятся в идентичном направлении.
Преимущества изобретения
[0007] Следовательно, возможный вариант пешехода обнаруживается сначала с помощью камеры, которая допускает независимое обнаружение пешехода посредством распознавания формы, и область для определения совпадения задается заранее на основе позиции обнаруженного возможного варианта пешехода. После этого, когда пешеход присутствует впереди рассматриваемого транспортного средства, объект, который обнаруживается посредством радара, который имеет более высокую способность к распознаванию объектов, чем камера, используется для определения совпадения с пешеходом, за счет этого определяя пешехода в течение короткого периода времени.
Как результат, можно повышать скорость реакции при определении пешеходов, при определении пешехода с использованием камеры и радара в ходе движения.
Помимо этого, область для определения совпадения расширена, когда позиция возможного варианта пешехода и позиция объекта находятся в идентичном направлении. Соответственно, даже на большом расстоянии между рассматриваемым транспортным средством и возможным вариантом пешехода, определение совпадения становится возможным посредством использования расширенной области для определения совпадения, в состоянии, в котором позиции возможного варианта пешехода и объекта находятся в идентичном направлении.
Краткое описание чертежей
[0008] Фиг. 1 является видом системы помощи при вождении, иллюстрирующим общую конфигурацию системы помощи при вождении транспортного средства с электроприводом, к которому применяются способ определения и устройство определения пешеходов согласно первому варианту осуществления.
Фиг. 2 является блок-схемой, иллюстрирующей подробную конфигурацию модуля обработки определения совпадения, включенного в контроллер помощи при вождении согласно первому варианту осуществления.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления автоматическим торможением, когда цель управления, которое выполняется посредством контроллера помощи при вождении первого варианта осуществления, представляет собой пешехода.
Фиг. 4 является картой пороговых значений TTC, иллюстрирующей пороговое значение TTC1 аварийной сигнализации, пороговое значение TTC2 предварительного торможения и пороговое значение TTC3 основного торможения, которые используются в управлении автоматическим торможением первого варианта осуществления.
Фиг. 5 является временной диаграммой, иллюстрирующей изменение режима работы автоматического торможения для режима аварийной сигнализации, режима предварительного торможения и режима основного торможения, когда прогнозное время TTC до контакта между рассматриваемым транспортным средством и пешеходом, когда управление автоматическим торможением первого варианта осуществления выполняется, уменьшается с постоянным градиентом.
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса определения совпадения (процесса определения совпадения при предварительном торможении и процесса определения совпадения при основном торможении), который выполняется на этапе S7 по фиг. 3.
Фиг. 7 является схематичным пояснительным видом определения совпадения, иллюстрирующим общее представление определения совпадения при предварительном торможении.
Фиг. 8 является пояснительным видом, иллюстрирующим разность углов для расширения области для определения совпадения при предварительном торможении и области для определения совпадения при основном торможении в процессе определения совпадения, показанном на фиг. 6.
Фиг. 9 является видом карты оценок, иллюстрирующим один пример карты оценок согласно нормальной области в области для определения совпадения при предварительном торможении.
Фиг. 10 является видом карты оценок, иллюстрирующим один пример карты оценок согласно расширенной области в области для определения совпадения при предварительном торможении.
Фиг. 11 является временной диаграммой, иллюстрирующей соответствующие характеристики продольного расстояния, поперечного расстояния, флага совпадения (флага совпадения при предварительном торможении, флага совпадения при основном торможении) и режима работы автоматического торможения, в сценарии, в котором пешеход пересекает позицию переднего направления на прогнозном пути рассматриваемого транспортного средства.
Фиг. 12 является временной диаграммой, иллюстрирующей соответствующие характеристики TTC, флага совпадения при предварительном торможении и тормоза, в сценарии, в котором пешеход выбегает впереди рассматриваемого транспортного средства и на прогнозный путь рассматриваемого транспортного средства из остановленного транспортного средства.
Фиг. 13 является временной диаграммой, иллюстрирующей соответствующие характеристики TTC, флага совпадения при предварительном торможении и тормоза, в сценарии, в котором выхлопной газ с белым дымом испускается из едущего впереди транспортного средства, которое присутствует впереди рассматриваемого транспортного средства в прогнозном пути.
Подробное описание вариантов осуществления изобретения
[0009] Ниже описывается предпочтительный вариант осуществления для реализации способа определения и устройства определения пешеходов настоящего изобретения на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
[0010] Сначала описывается конфигурация.
Способ определения и устройство определения пешеходов согласно первому варианту осуществления применяются к транспортному средству с электроприводом (гибридному транспортному средству, электротранспортному средству, транспортному средству на топливных элементах и т.д.), оснащенному системой управления автоматическим торможением (называемой "системой управления экстренным тормозом"), в качестве одного примера системы помощи при вождении. Ниже отдельно описываются "общая конфигурация системы помощи при вождении", "подробная конфигурация модуля обработки определения совпадения", "конфигурация процесса управления автоматическим торможением" и "конфигурация процесса определения совпадения" относительно конфигурации первого варианта осуществления.
[0011] Общая конфигурация системы помощи при вождении
Фиг. 1 иллюстрирует систему помощи при вождении транспортного средства с электроприводом, к которому применяются способ определения и устройство определения пешеходов согласно первому варианту осуществления. Ниже описывается общая конфигурация системы помощи при вождении со ссылкой на фиг. 1.
[0012] Система помощи при вождении содержит модуль 1 камеры переднего вида, радар 2 миллиметрового диапазона, контроллер 3 помощи при вождении и тормозной блок 4 с электрическим управлением в качестве основных компонентов, как проиллюстрировано на фиг. 1. Система помощи при вождении также содержит комбинацию 5 приборов, аварийный зуммер 6, лампу 7 аварийной сигнализации торможения, индикатор 8 аварийной сигнализации торможения, тормозное удерживающее реле 9 и лампу 10 стоп-сигнала в качестве периферийных компонентов.
[0013] Модуль 1 камеры переднего вида допускает захват изображения условий впереди рассматриваемого транспортного средства с использованием элемента формирования изображений, к примеру, CCD- или CMOS-элемента формирования изображений, и, например, присоединяется к центральной верхней позиции ветрового стекла и обнаруживает информацию изображений из области впереди рассматриваемого транспортного средства, которая представляет собой область формирования изображений. Обнаруженная информация изображений передается в контроллер 3 помощи при вождении посредством использования CAN-связи.
"CAN" является аббревиатурой для "контроллерной сети".
[0014] Радар 2 миллиметрового диапазона представляет собой радарную систему, которая допускает обнаружение условий впереди рассматриваемого транспортного средства с использованием радиоволн в полосе частот миллиметрового диапазона и, например, присоединяется к переднему бамперу и обнаруживает отраженные волны из объектов (едущих впереди транспортных средств, пешеходов и т.д.), которые присутствуют впереди рассматриваемого транспортного средства, посредством излучения миллиметровых волн в переднем направлении. Информация присутствия/отсутствия объекта и информация направления/позиции объекта согласно обнаруженным отраженным волнам передаются в контроллер 3 помощи при вождении посредством использования CAN-связи.
[0015] Контроллер 3 помощи при вождении переносит сигналы, которые необходимы для управления, и, например, присоединяется к крайней внутренней позиции бардачка и выполняет управление помощью при вождении, к примеру, управление автоматическим торможением. В дополнение к приему информации из модуля 1 камеры переднего вида и радара 2 миллиметрового диапазона на основе сигналов CAN-связи, контроллер 3 помощи при вождении принимает информацию рассматриваемого транспортного средства, такую как скорость вращения колес, величина открытия позиции педали акселератора, тормозной переключатель, давление тормозной жидкости, позиция переключения передач, угол поворота при рулении, угловая скорость руления, ускорение, скорость относительно вертикальной оси и включенное/выключенное состояние системы, из различных контроллеров, которые не показаны, на основе сигналов CAN-связи. Контроллер 3 помощи при вождении передает сигнал команды управления давлением тормозной жидкости в тормозной блок 4 с электрическим управлением через линию CAN-связи, когда предварительное торможение или основное торможение работает после того, как управление автоматическим торможением начинается. После этого, когда управление автоматическим торможением начинается, контроллер помощи при вождении передает выходной сигнал зуммера и сигнал приборной панели в комбинацию 5 приборов через линию CAN-связи. Кроме того, контроллер помощи при вождении передает сигнал приведения в действие лампы стоп-сигнала в тормозное удерживающее реле 9, когда предварительное торможение или основное торможение работает после того, как управление автоматическим торможением начинается.
[0016] Контроллер 3 помощи при вождении здесь упоминается как "ADAS-модуль управления (ADAS C/U)" и имеет функцию интегрального контроллера, который помогает при множестве операций вождения, включающих в себя функцию управления автоматическим торможением (FEB-функцию). Примеры функций управления помощью при вождении, помимо функции управления автоматическим торможением (FEB-функции), включают в себя функцию автоматической системы оптимального регулирования скорости (ACC-функцию), функцию управления удержанием на полосе движения (LKS-функцию) и функцию управления поведением транспортного средства (VDC-функцию).
"ADAS" является аббревиатурой для "усовершенствованной системы помощи водителю".
[0017] Тормозной блок 4 с электрическим управлением содержит интегрированный модуль управления, главный цилиндр и электроусилитель (соответствующий совместному рекуперативному торможению в транспортном средстве с электроприводом), который управляет давлением жидкости, которая должна подаваться в ABS/VDC-актуатор. Когда модуль управления этого тормозного блока 4 с электрическим управлением принимает сигнал команды управления давлением тормозной жидкости из контроллера 3 помощи при вождении через линию CAN-связи, модуль управления приводит в действие электромотор электроусилителя и перемещает поршень таким образом, чтобы формировать давление жидкости в главном цилиндре. Когда операция торможения водителем обнаруживается, сигнал обнаружения тормоза водителя передается из этого тормозного блока 4 с электрическим управлением в контроллер 3 помощи при вождении через линию CAN-связи.
[0018] Когда выходной сигнал зуммера из контроллера 3 помощи при вождении принимается через линию CAN-связи, комбинация 5 приборов выдает звук аварийного зуммера 6. Помимо этого, когда сигнал приборной панели из контроллера 3 помощи при вождении принимается через линию CAN-связи, комбинация приборов обеспечивает мигание или подсвечивает лампу 7 аварийной сигнализации торможения, а также подсвечивает индикатор 8 аварийной сигнализации торможения.
[0019] Когда сигнал приведения в действие лампы стоп-сигнала из контроллера 3 помощи при вождении принимается через линию CAN-связи, тормозное удерживающее реле 9 подсвечивает лампу 10 стоп-сигнала с обходом схемы лампы стоп-сигнала.
[0020] Контроллер 3 помощи при вождении содержит модуль 31 обработки определения объектов, модуль 32 обработки определения совпадения и модуль 33 вычисления команд управления, как проиллюстрировано на фиг. 1.
[0021] Модуль 31 обработки определения объектов получает информацию рассматриваемого транспортного средства и информацию камеры, которая определяет то, что объекты присутствуют в передней части транспортного средства, в том числе едущие впереди транспортные средства и пешеходы, на основе информации изображений из модуля 1 камеры переднего вида, и дополнительно обнаруживает возможные варианты пешеходов из объектов. После этого, когда обнаруживается то, что возможный вариант пешехода присутствует в прогнозном пути рассматриваемого транспортного средства в течение заданного периода времени, выполнение управления автоматическим торможением разрешается, с обнаруженным возможным вариантом пешехода в качестве цели управления. После того, как выполнение управления автоматическим торможением разрешается, расстояние между рассматриваемым транспортным средством и возможным вариантом пешехода делится на относительную скорость (= скорость рассматриваемого транспортного средства), чтобы вычислять прогнозное время TTC до контакта. Затем определяется то, прогнозное время TTC до контакта меньше или равно пороговому значению TTC1 аварийной сигнализации, меньше или равно пороговому значению TTC2 предварительного торможения и меньше или равно пороговому значению TTC3 основного торможения либо нет. Когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC1 аварийной сигнализации, управление автоматическим торможением начинается с использованием аварийного сигнала. Когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC2 предварительного торможения, предварительное торможение начинается с использованием аварийного сигнала, и медленное торможение начинается. Когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC3 основного торможения, основное торможение начинается с использованием аварийного сигнала и резкого торможения. "TTC" является аббревиатурой для "времени до столкновения".
[0022] После начала управления автоматическим торможением, модуль 32 обработки определения совпадения выполняет процесс определения совпадения, чтобы определять то, совпадает или нет возможный вариант пешехода, обнаруженный посредством модуля 1 камеры переднего вида, с объектом, обнаруженным посредством отраженных волн из радара 2 миллиметрового диапазона. Ниже подробнее описывается "Подробная конфигурация модуля обработки определения совпадения".
[0023] Модуль 33 вычисления команд управления принимает результат обработки из модуля 32 обработки определения совпадения, чтобы вычислять команду управления, и выводит сигналы команд управления в тормозной блок 4 с электрическим управлением, комбинацию 5 приборов и тормозное удерживающее реле 9, через линию CAN-связи. Модуль вычисления команд управления выводит сигнал команды управления давлением тормозной жидкости в тормозной блок 4 с электрическим управлением для выполнения предварительного торможения посредством использования медленного торможения, когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC2 предварительного торможения, и выводит сигнал команды управления давлением тормозной жидкости для выполнения основного торможения посредством использования резкого торможения, когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC3 основного торможения. Модуль вычисления команд управления выводит, в комбинацию 5 приборов, выходной сигнал зуммера для выдачи звука аварийного зуммера 6, сигнал предупреждающего индикатора для мигания или освещения лампы 7 аварийной сигнализации торможения и сигнал приборной панели для освещения индикатора 8 аварийной сигнализации торможения, когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC1 аварийной сигнализации. Модуль вычисления команд управления выводит сигнал приведения в действие лампы стоп-сигнала в тормозное удерживающее реле 9 для обхода схемы лампы стоп-сигнала и подсвечивания лампы 10 стоп-сигнала, когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC2 предварительного торможения.
[0024] Подробная конфигурация модуля обработки определения совпадения
Фиг. 2 иллюстрирует подробную конфигурацию модуля 32 обработки определения совпадения контроллера 3 помощи при вождении согласно первому варианту осуществления. Ниже описывается подробная конфигурация модуля 32 обработки определения совпадения, со ссылкой на фиг. 2.
[0025] Модуль 34 обработки интерполяции и модуль 35 обработки сброса предоставляются между модулем 1 камеры переднего вида и модулем 32 обработки определения совпадения, как проиллюстрировано на фиг. 2. Модуль 34 обработки интерполяции выполняет процесс интерполяции для получения информации позиции (максимальное время интерполяции в 300 мс), когда возможный вариант пешехода, который обнаруживается посредством модуля 1 камеры переднего вида (один объект, к которому присоединяется идентификатор), перемещается, вычисляет относительную скорость и координаты объекта и выводит вычисленные данные вместе с идентификатором в модуль 32 обработки определения совпадения и модуль 35 обработки сброса. Когда возможный вариант пешехода, который обнаруживается посредством модуля 1 камеры переднего вида, изменяется, и поперечная позиция изменяется на предварительно определенное расстояние или более (например, 3 м или больше), модуль 35 обработки сброса, выводит сигнал сброса для сброса результата определения совпадения в блок 32c определения нахождения в области для определения совпадения. Если изменение поперечной позиции меньше предварительно определенного расстояния, определение совпадения продолжается.
[0026] Модуль 36 обработки интерполяции предоставляется между радаром 2 миллиметрового диапазона и модулем 32 обработки определения совпадения, как проиллюстрировано на фиг. 2. Модуль 36 обработки интерполяции выполняет процесс интерполяции информации позиции (максимальное время интерполяции в 300 мс), когда объекты (например, 20 объектов), которые обнаруживаются посредством радара 2 миллиметрового диапазона, перемещаются, вычисляет относительные скорости и координаты объектов и выводит вычисленные данные в блок 32a ограничения поперечной позиции модуля обработки определения совпадения.
[0027] Модуль 32 обработки определения совпадения выполняет определение совпадения, с использованием возможного варианта пешехода, обнаруженного посредством модуля 1 камеры переднего вида, и объектов, обнаруженных посредством радара 2 миллиметрового диапазона. Этот модуль 32 обработки определения совпадения содержит блок 32a ограничения поперечной позиции, блок 32b выбора ближайших объектов и блок 32c определения нахождения в области для определения совпадения, как проиллюстрировано на фиг. 2.
[0028] Блок 32a ограничения поперечной позиции ограничивает поперечную позицию относительно возможного варианта пешехода, обнаруженного посредством модуля камеры 1, в пределах предварительно определенного расстояния (например, ± 2 м) и выбирает объекты, которые присутствуют в пределах ограниченного диапазона, из множества объектов (например, 20 объектов), вводимых из модуля 36 обработки интерполяции. Блок ограничения поперечной позиции затем выводит множество выбранных объектов в блок 32b выбора ближайших объектов.
[0029] Блок 32b выбора ближайших объектов выбирает объект, который является ближайшим по расстоянию от возможного варианта пешехода, из множества объектов, вводимых из блока 32a ограничения поперечной позиции. Блок выбора ближайших объектов затем выводит выбранный ближайший объект в блок 32c определения нахождения в области для определения совпадения.
Как проиллюстрировано в нижней левой рамке по фиг. 2, "ближайший объект" здесь означает объект D1, расстояние которого от возможного варианта B' пешехода является ближайшим, когда множество объектов D1, D2, D3 (тел для радарного обнаружения) присутствуют вокруг возможного варианта B' пешехода.
[0030] Блок 32c определения нахождения в области для определения совпадения вводит ближайший объект D1 из блока 32b выбора ближайших объектов, определяет то, присутствует или нет ближайший объект в области C для определения совпадения, которая задана с возможным вариантом B' пешехода в качестве центральной точки, в течение предварительно определенного периода времени, и выводит результат определения совпадения. В блоке 32c определения нахождения в области для определения совпадения, выполняются два определения совпадения: определение совпадения при предварительном торможении и определение совпадения при основном торможении.
[0031] Здесь, как проиллюстрировано в нижней правой рамке по фиг. 2, область C для определения совпадения включает в себя область C1 для определения совпадения при предварительном торможении и область C2 для определения совпадения при основном торможении. Область C1 для определения совпадения при предварительном торможении, которая используется для определения совпадения при предварительном торможении, представляет собой область для определения совпадения с возможным вариантом B' пешехода в качестве центральной точки и задается в качестве прямоугольной области, имеющей большую площадь, чем область C2 для определения совпадения при основном торможении. Область C2 для определения совпадения при основном торможении представляет собой область для определения совпадения, с возможным вариантом B' пешехода в качестве центральной точки, аналогично области C1 для определения совпадения при предварительном торможении, и задается в качестве прямоугольной области, имеющей меньшую площадь, чем область C1 для определения совпадения при предварительном торможении. Карта оценок предварительного торможения и карта оценок основного торможения, которые задаются на основе области C для определения совпадения, используются для определения того, присутствует или нет ближайший объект D1 в области C для определения совпадения в течение предварительно определенного периода времени (см. фиг. 9 и 10).
[0032] Конфигурация процесса управления автоматическим торможением
Фиг. 3 иллюстрирует последовательность операций процесса управления автоматическим торможением, когда цель управления, которое выполняется посредством контроллера 3 помощи при вождении первого варианта осуществления, представляет собой пешехода. Ниже описывается каждый из этапов на фиг. 3, которые представляют конфигурацию процесса управления автоматическим торможением.
[0033] На этапе S1, информация рассматриваемого транспортного средства получается, и процесс переходит к этапу S2.
Здесь, "информация рассматриваемого транспортного средства" означает скорость вращения колес, величину открытия позиции педали акселератора, тормозной переключатель, давление тормозной жидкости, позицию переключения передач, угол поворота при рулении, угловую скорость руления, ускорение, скорость относительно вертикальной оси, включенное/выключенное состояние системы и т.д., которые принимаются из различных бортовых контроллеров посредством использования сигналов CAN-связи.
[0034] На этапе S2, после получения информации рассматриваемого транспортного средства на этапе S1, информация камеры получается из модуля 1 камеры переднего вида, и процесс переходит к этапу S3.
Здесь, "информация камеры" означает информацию изображений в передней части транспортного средства, которая получается из модуля 1 камеры переднего вида.
[0035] На этапе S3, после получения информации камеры на этапе S2, определяется то, обнаружен или нет возможный вариант пешехода на основе информации камеры. Если "Да" (возможный вариант пешехода обнаружен), процесс переходит к этапу S4, а если "Нет" (возможный вариант пешехода не обнаружен), процесс возвращается к этапу S1.
Здесь, "обнаружение возможного варианта пешехода" выполняется посредством известного способа обнаружения возможных вариантов пешеходов, в котором различные объекты, которые присутствуют в передней части транспортного средства, обнаруживаются на основе информации изображений из модуля 1 камеры переднего вида, и возможный вариант пешехода дополнительно обнаруживается из множества объектов, включающих в себя едущие впереди транспортные средства.
[0036] Как раскрыто в выложенной заявке на патент (Япония) № 2009-294842, в примере известного способа обнаружения возможных вариантов пешеходов, характерная точка извлекается из изображения, захваченного посредством камеры, и целевая зона, которая включает в себя целевой трехмерный объект, извлекается на основе информации перемещения извлеченной характерной точки. Затем информация перемещения, связанная с целевой зоной, сравнивается с информацией перемещения, связанной с зоной сравнения, которая задается вокруг целевой зоны, и обнаруживается то, представляет собой или нет целевой трехмерный объект возможный вариант пешехода, на основе результата сравнения. Помимо этого, как раскрыто в выложенной заявке на патент (Япония) № 2013-228915, зона, в которой может присутствовать нога пешехода, извлекается из изображения, захваченного посредством камеры, и зоны обработки, заданные в извлеченном возможном варианте зоны, разделяются на два класса. Затем создается гистограмма, представляющая распределение степеней разделения значений яркости между двумя классами, и обнаруживается то, представляет собой или нет целевой трехмерный объект возможный вариант пешехода, на основе формы созданной гистограммы степеней разделения. Кроме того, как раскрыто в выложенной заявке на патент (Япония) № 2014-35560, пороговое значение, которое используется при определении того, изменяется или нет часть информации скорости перемещения, которая обнаруживается в пределах интересующей зоны, которая представляет выбегание, в зависимости от того, рассматриваемое транспортное средство движется прямо вперед или поворачивается, чтобы быстро обнаруживать возможный вариант пешехода, который появляется из мертвой зоны.
[0037] На этапе S4, после определения того, что возможный вариант пешехода обнаружен, на этапе S3, выполнение управления автоматическим торможением разрешается, и процесс переходит к этапу S5.
Здесь, "разрешение выполнения управления автоматическим торможением" означает разрешение управления автоматическим торможением, которое переключается из "режим аварийной сигнализации → режим предварительного торможения → режим основного торможения", когда, например, прогнозное время TTC до контакта, когда возможный вариант пешехода обнаруживается, постепенно снижается со значения, которое превышает пороговое значение TTC1 аварийной сигнализации.
[0038] На этапе S5, после разрешения выполнять управление автоматическим торможением на этапе S4, определяется то, прогнозное время TTC до контакта меньше или равно пороговому значению TTC1 аварийной сигнализации, меньше или равно пороговому значению TTC2 предварительного торможения и меньше или равно пороговому значению TTC3 основного торможения либо нет. Если "Да" ("TTC ≤ TTC1, TTC2, TTC3"), процесс переходит к этапу S6, а если "Нет" ("TTC > TTC1"), повторяется определение этапа S5.
Здесь, "пороговое значение TTC1 аварийной сигнализации", "пороговое значение TTC2 предварительного торможения" и "пороговое значение TTC3 основного торможения" задаются с возможностью иметь взаимосвязь: "пороговое значение TTC1 аварийной сигнализации> пороговое значение TTC2 предварительного торможения > пороговое значение TTC3 основного торможения", как показано на карте пороговых значений TTC по фиг. 4.
[0039] Чтобы подробнее описывать пороговое значение TTC на основе карты пороговых значений TTC, проиллюстрированной на фиг. 4: пороговое значение TTC1 аварийной сигнализации задается равным значению постоянного высокого прогнозного времени TTC до контакта независимо от скорости рассматриваемого транспортного средства (VSP). Пороговое значение TTC2 предварительного торможения в зоне скоростей транспортного средства "скорость рассматриваемого транспортного средства ≤ первая скорость VSP1" задается равным постоянному значению, которое совпадает с пороговым значением TTC3 основного торможения. Пороговое значение TTC2 предварительного торможения в зоне скоростей транспортного средства "первая скорость VSP1 < скорость рассматриваемого транспортного средства < вторая скорость VSP2" задается с возможностью иметь характеристику, которая увеличивается пропорционально со скоростью рассматриваемого транспортного средства (VSP). Пороговое значение TTC2 предварительного торможения в зоне скоростей транспортного средства "скорость рассматриваемого транспортного средства ≥ вторая скорость VSP2" задается равным постоянному значению, которое немного меньше порогового значения TTC1 аварийной сигнализации. Пороговое значение TTC3 основного торможения задается равным значению постоянного низкого прогнозного времени TTC до контакта независимо от скорости рассматриваемого транспортного средства (VSP). Таким образом, в зоне низких скоростей транспортного средства "скорость рассматриваемого транспортного средства ≤ первая скорость VSP1", отсутствует предварительное торможение, и выполняется управление автоматическим торможением посредством использования аварийного сигнала и основного торможения. В зоне скоростей транспортного средства "первая скорость VSP1 < скорость рассматриваемого транспортного средства < вторая скорость VSP2", TTC-зона предварительного торможения становится более широкой по мере того, как скорость рассматриваемого транспортного средства увеличивается, и TTC-зона предварительного торможения становится более узкой по мере того, как скорость рассматриваемого транспортного средства уменьшается.
Если цель управления в управлении автоматическим торможением представляет собой едущее впереди транспортное средство, выполняется управление автоматическим торможением, при котором горизонтальная ось карты пороговых значений TTC представляет относительную скорость между рассматриваемым транспортным средством и едущим впереди транспортным средством.
[0040] На этапе S6, после определения того, что "TTC ≤ TTC1, TTC2, TTC3", на этапе S5, управление автоматическим торможением начинается, и процесс переходит к этапу S7.
Здесь, если прогнозное время TTC до контакта, когда управление автоматическим торможением разрешается вследствие обнаружения возможного варианта пешехода, меньше или равно пороговому значению TTC1 аварийной сигнализации, управление автоматическим торможением, которое переключается из "режим аварийной сигнализации → режим предварительного торможения → режим основного торможения", начинается, как проиллюстрировано на фиг. 5. Если прогнозное время TTC до контакта, когда управление автоматическим торможением разрешается вследствие обнаружения возможного варианта пешехода, меньше или равно пороговому значению TTC2 предварительного торможения, управление автоматическим торможением, в котором режим переключается из "режим предварительного торможения (аварийный сигнал) → режим основного торможения (аварийный сигнал)", начинается. Дополнительно, если прогнозное время TTC до контакта, когда управление автоматическим торможением разрешается вследствие обнаружения возможного варианта пешехода, меньше или равно пороговому значению TTC3 основного торможения, управление автоматическим торможением для выполнения режима основного торможения (аварийный сигнал) начинается.
[0041] Ниже описывается изменение режима для режима аварийной сигнализации, режима предварительного торможения и режима основного торможения, когда прогнозное время TTC до контакта рассматриваемого транспортного средства с пешеходом, когда управление автоматическим торможением выполняется, уменьшается с постоянным градиентом, со ссылкой на временную диаграмму работы автоматического торможения, проиллюстрированную на фиг. 5. Управление автоматическим торможением не начинается в течение периода вплоть до времени t1, когда прогнозное время TTC до контакта рассматриваемого транспортного средства A с пешеходом B превышает аварийное пороговое значение TTC1. Когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC1 аварийной сигнализации во время t1, помощь при вождении из аварийного сигнала чрезвычайной ситуации, который уведомляет водителя в визуальной и звуковой форме посредством использования предупреждающего индикатора или зуммера, начинается. Когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC2 предварительного торможения во время t2, предварительное торможение посредством использования медленного торможения в дополнение к аварийному сигналу чрезвычайной ситуации начинается. Когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC3 основного торможения во время t3, основное торможение посредством использования резкого торможения в дополнение к аварийному сигналу чрезвычайной ситуации начинается, и контакт между рассматриваемым транспортным средством A и пешеходом B предотвращается. Относительно этого управления автоматическим торможением, управление согласно идентичному изменению режима непрерывно выполняется независимо от того, устанавливается или нет определение совпадения.
[0042] На этапе S7, после начала управления автоматическим торможением на этапе S6 или определения того, что предварительно определенное время не истекло, на этапе S10, выполняются сравнение и определение относительно того, совпадает или нет возможный вариант пешехода, обнаруженный посредством модуля 1 камеры переднего вида, с объектом, обнаруженным посредством отраженных волн из радара 2 миллиметрового диапазона, и процесс переходит к этапу S8. Ниже описываются подробности процесса определения совпадения в "Конфигурация процесса определения совпадения" со ссылкой на фиг. 6.
[0043] На этапе S8, после определения совпадения на этапе S7, определяется то, установлено или нет совпадение. Если "Да" (совпадение установлено), процесс переходит к этапу S9, а если "Нет" (совпадение не установлено), процесс переходит к этапу S10.
Здесь, информация относительно "совпадение установлено/совпадение не установлено" принимается из процесса определения совпадения, показанного на фиг. 6.
[0044] На этапе S9, после определения того, что совпадение установлено, на этапе S8, возможный вариант B' пешехода, обнаруженный посредством модуля 1 камеры переднего вида, определяется в качестве пешехода B, цели управления, управление автоматическим торможением продолжается, и процесс переходит к концу. Здесь, когда пешеход B в качестве цели управления определяется вследствие установления совпадения, допустимое замедление G задается выше (например, приблизительно в 1,0 G) допустимого замедления G (например, приблизительно в 0,6 G) в управлении автоматическим торможением перед установлением совпадения, но в то время как возможный вариант B' пешехода обнаруживается. С точки зрения непосредственно правила управления автоматическим торможением, управление автоматическим торможением продолжается посредством задания идентичного правила управления независимо от того, установлено или нет совпадение.
[0045] На этапе S10, после определения того, что совпадение не установлено, на этапе S8, определяется то, истекло или нет предварительно определенное время T после того, как определение совпадения начато. Если "Да" (предварительно определенное время T истекло), процесс переходит к этапу S11, а если "Нет" (предварительно определенное время T не истекло), процесс возвращается к этапу S7.
Здесь, "предварительно определенное время T" задается равным времени, полученному посредством суммирования допустимого запаса времени со временем, требуемым для того, чтобы определять пешехода B в качестве цели управления, когда возможный вариант B' пешехода, обнаруженный посредством модуля 1 камеры переднего вида, представляет собой пешехода, который фактически существует.
[0046] На этапе S11, после определения того, что предварительно определенное время T истекло на этапе S10, управление автоматическим торможением отменяется, и процесс переходит к концу.
Таким образом, если определено то, что совпадение не установлено, даже когда предварительно определенное время T истекло после начала определения совпадения, определяется то, что возможный вариант B' пешехода, обнаруженный посредством модуля 1 камеры переднего вида, не представляет собой пешехода B в качестве цели управления. При отмене управления автоматическим торможением в режиме аварийной сигнализации, аварийный сигнал прекращается, и в режиме предварительного торможения или режиме основного торможения, аварийный сигнал прекращается, и действие тормозной силы, которая прикладывается посредством управления автоматическим торможением, прекращается. Управление прекращением действия тормозной силы представляет собой управление для прекращения действия тормозной силы при подавлении внезапного изменения поведения транспортного средства; например, выполняется управление, в котором тормозная сила во время отпускания автоматического тормоза постепенно уменьшается, или тормозная сила во время отпускания автоматического тормоза поддерживается в течение предварительно определенного времени, и затем ее действие постепенно прекращается.
[0047] Конфигурация процесса определения совпадения
Фиг. 6 иллюстрирует последовательность операций процесса определения совпадения (процесса определения совпадения при предварительном торможении и процесс определения совпадения при основном торможении), который выполняется на этапе S7 по фиг. 3. Ниже описывается каждый из этапов на фиг. 6, который представляет конфигурацию процесса определения совпадения. Когда управление автоматическим торможением начинается, сначала выполняется процесс определения совпадения при предварительном торможении с использованием карты оценок предварительного торможения. После этого, когда совпадение установлено в определении совпадения при предварительном торможении, выполняется процесс определения совпадения при основном торможении с использованием карты оценок основного торможения. Таким образом, процесс определения совпадения при предварительном торможении и процесс определения совпадения при основном торможении отличаются только по времени для того, чтобы начинать процесс определения совпадения, и по карте оценок и имеют идентичный контент с процессом определения совпадения.
[0048] На этапе S71, после начала или инициализации оценки на этапе S74, информация камеры получается из модуля 1 камеры переднего вида, и процесс переходит к этапу S72.
Здесь, "информация камеры" означает информацию изображений в передней части транспортного средства, которая получается из модуля 1 камеры переднего вида.
[0049] На этапе S72, после получения информации камеры на этапе S71, определяется то, обнаружен или нет возможный вариант пешехода на основе информации камеры. Если "Да" (возможный вариант пешехода обнаружен), процесс переходит к этапу S73, а если "Нет" (возможный вариант пешехода не обнаружен), процесс возвращается к этапу S81.
Здесь, "обнаружение возможного варианта пешехода" выполняется посредством известного способа обнаружения возможных вариантов пешеходов идентично этапу S3 по фиг. 3.
[0050] На этапе S73, после определения того, что возможный вариант пешехода обнаруживается, на этапе S72, определяется то, является или нет возможный вариант пешехода, обнаруженный на этот раз, идентичным возможному варианту пешехода, обнаруженному в прошлый раз посредством модуля 1 камеры переднего вида. Если "Да" (возможные варианты пешеходов являются идентичными), процесс переходит к этапу S75, а если "Нет" (возможные варианты пешеходов отличаются), процесс переходит к этапу S74.
Здесь, определение того, является или нет ранее обнаруженный возможный вариант пешехода идентичным текущему обнаруженному возможному варианту пешехода, выполняется посредством сравнения идентификаторов, которые присоединяются к возможным вариантам пешеходов.
[0051] На этапе S74, после определения того, что возможные варианты пешеходов отличаются, на этапе S73, оценка, которая суммирована до этой точки, инициализируется, и процесс возвращается к этапу S71.
[0052] На этапе S75, после определения того, что возможные варианты пешеходов являются идентичными, на этапе S73, информация получается из радара 2 миллиметрового диапазона, и процесс переходит к этапу S76.
[0053] На этапе S76, после получения информации радара миллиметрового диапазона на этапе S75, объекты сужаются, из множества объектов, которые обнаруживаются посредством отраженных волн из радара 2 миллиметрового диапазона, посредством использования ограничения поперечной позиции, после чего ближайший объект выбирается, и процесс переходит к этапу S77.
Здесь, после выбора ближайшего объекта, в сценарии, в котором пешеход пересекает впереди рассматриваемого транспортного средства, предполагается, что возможный вариант B' пешехода обнаруживается посредством модуля 1 камеры переднего вида, как проиллюстрировано на фиг. 5. В это время, из множества объектов D1, D2, D3, которые обнаруживаются посредством отраженных волн из радара 2 миллиметрового диапазона, объект D1, расстояние которого от возможного варианта B' пешехода является кратчайшим, выбирается в качестве ближайшего объекта.
[0054] На этапе S77, после выбора ближайшего объекта на этапе S76, определяется то, меньше или равна либо нет разность dA углов между углом обнаружения возможного варианта B' пешехода, обнаруженного посредством модуля 1 камеры переднего вида, и углом обнаружения ближайшего объекта D1, обнаруженного посредством радара 2 миллиметрового диапазона, предварительно определенному значению (например, 5 градусов). Если "Да" ("разность dA углов ≤ предварительно определенное значение"), процесс переходит к этапу S79, а если "Нет" ("разность dA углов > предварительно определенное значение"), процесс переходит к этапу S78.
Здесь, "разность dA углов" представляет собой разность углов между углом обнаружения возможного варианта B' пешехода и углом обнаружения ближайшего объекта D1, как проиллюстрировано на фиг. 8. "Предварительно определенное значение" задается равным значению разности углов, при котором определяется то, что направление возможного варианта B' пешехода практически совпадает с направлением ближайшего объекта D1, когда модуль 1 камеры переднего вида и возможный вариант пешехода B1 отделены посредством расстояния.
[0055] На этапе S78, после определения того, что "разность dA углов > предварительно определенное значение", на этапе S77, оценка объекта D1 суммируется с использованием карты оценок, которая имеет нормальную область, и процесс переходит к этапу S80.
[0056] Здесь, относительно "карты оценок, которая имеет нормальную область", в случае области C1 для определения совпадения при предварительном торможении, первая линия L1 оценки, вторая линия L2 оценки и линия L3 оценки на границе области, центрированные вокруг возможного варианта B' пешехода, используются для того, чтобы разделять область на четыре концентрических зоны, как проиллюстрировано на фиг. 7. Затем карта оценок имеет нормальную область, в которой оценки на положительной стороне (0,+8,+10), которые увеличиваются с уменьшением расстояния от центральной точки (возможного варианта B' пешехода), назначаются области в пределах линии L3 оценки на границе области, и оценка на отрицательной стороне (-3) назначается области за пределами линии L3 оценки на границе области, как проиллюстрировано на фиг. 9. То же применимо к случаю области C2 для определения совпадения при основном торможении.
[0057] "Суммирование оценки" означает суммирование оценки в расчете на один цикл управления (например, 10 мс), когда выполняется определение совпадения. Значение оценки в расчете на один цикл управления должно составлять оценку (балл) области, в которой ближайший объект D1 проиллюстрирован на графике, относительно области C1 для определения совпадения при предварительном торможении, представленной на осях координат Dx, Dy, как проиллюстрировано на фиг. 9.
Следует отметить, что Dx и Dy являются следующими:
Dx=|Xr-Xc|
Dy=|Yr-Yc|,
где Xc: координата X возможного варианта B' пешехода, Yc: координата Y возможного варианта B' пешехода, Xr: координата X объекта D1, Yrc: координата Y объекта D1.
[0058] На этапе S79, после определения того, что "разность dA углов ≤ предварительно определенное значение", на этапе S77, оценка объекта D1 суммируется с использованием карты оценок, которая имеет расширенную область, и процесс переходит к этапу S80.
[0059] Здесь, в случае области C1 для определения совпадения при предварительном торможении, "карта оценок, которая имеет расширенную область" означает карту оценок, которая изменена на область C1' для определения совпадения при предварительном торможении, которая расширена в продольном направлении, которое представляет собой продольное направление рассматриваемого транспортного средства A, как очевидно из сравнения между фиг. 9 и фиг. 10. Эта расширенная область C1' для определения совпадения при предварительном торможении разделяется на четыре концентрических зоны посредством первой линии L1' оценки, второй линии L2' оценки и линии L3' оценки на границе области, с возможным вариантом B' пешехода в качестве центра. Затем карта оценок имеет расширенную область, в которой оценки на положительной стороне (0,+8,+10), которые увеличиваются с уменьшением расстояния до центральной точки (возможного варианта B' пешехода), назначаются области в пределах линии L3' оценки на границе области, и оценка на отрицательной стороне (-3) назначается области за пределами линии L3 оценки на границе области, как проиллюстрировано на фиг. 10. То же применимо к случаю расширенной области C2' для определения совпадения при основном торможении.
[0060] В расширенной области C1' для определения совпадения при предварительном торможении, координата y4 в направлении по оси Y первой линии L1' оценки задается превышающей координату y3 в направлении по оси Y линии L3 оценки на границе области для нормальной области C1 (продольное расширение). Помимо этого, координаты x1 и x2 в направлении по оси X первой линии L1 оценки и второй линии L2' оценки являются идентичными координатам в нормальной области C1, и только координата x4 в направлении по оси X линии L3 оценки на границе области задается превышающей координату x3 в направлении по оси X линии L3 оценки на границе области для нормальной области C1. "Суммирование оценки" является идентичным суммированию на этапе S78.
[0061] На этапе S80, после суммирования оценки нормальной области или расширенной области на этапе S78 или этапе S79, определяется то, превышает или нет суммированная оценка пороговое значение. Если "Да" ("оценка > пороговое значение"), процесс переходит к этапу S82, а если "Нет" ("оценка ≤ пороговое значение"), процесс переходит к этапу S81.
Здесь, "пороговое значение" задается равным значению, с помощью которого определяется то, что совпадение установлено с хорошей скоростью реакции, поскольку соответствие между возможным вариантом B' пешехода и объектом D1 является более высоким, например, равным значению приблизительно в 200. Таким образом, когда пороговое значение задается равным 200, и один цикл управления задается равным 10 мс в кратчайшем случае, в котором оценки суммируются со значением (+10) в расчете на один цикл управления, определяется то, что совпадение установлено в 200 мс.
[0062] На этапе S81, после определения того, что "оценка ≤ пороговое значение", на этапе S80, результат определения совпадения, указывающий то, что совпадение не установлено, выводится, и процесс переходит к концу.
[0063] На этапе S82, после определения того, что "оценка > пороговое значение", на этапе S80, результат определения совпадения, указывающий то, что совпадение установлено, выводится, и процесс переходит к концу.
[0064] Далее описываются операции.
Ниже отдельно описываются "операция процесса управления автоматическим торможением", "операция управления автоматическим торможением", "операция процесса определения совпадения", "операция определения совпадения" и "характерная операция определения совпадения" относительно операций первого варианта осуществления.
[0065] Операция процесса управления автоматическим торможением
Ниже описывается операция процесса управления автоматическим торможением, на основе блок-схемы последовательности операций способа по фиг. 3.
Когда возможный вариант B' пешехода не обнаруживается на основе информации камеры, процесс, который переходит от "этап S1 → этап S2 → этап S3" на блок-схеме последовательности операций способа по фиг. 3, повторяется. После этого, когда возможный вариант B' пешехода обнаруживается на основе информации камеры, процесс переходит от этапа S3 к этапу S4, и на этапе S4, выполнение управления автоматическим торможением разрешается.
[0066] Когда выполнение управления автоматическим торможением разрешается на этапе S4, процесс переходит от этапа S4 к этапу S5, и на этапе S5, определяется то, прогнозное время TTC до контакта меньше или равно пороговому значению TTC1 аварийной сигнализации, меньше или равно пороговому значению TTC2 предварительного торможения и меньше или равно пороговому значению TTC3 основного торможения либо нет. Когда определяется то, что "TTC ≤ TTC1" или "TTC ≤ TTC2", или "TTC ≤ TTC3", на этапе S5, процесс переходит к этапу S6, и на этапе S6, начинается управление автоматическим торможением. Здесь, когда определяется то, что "TTC ≤ TTC1", управление автоматическим торможением, которое переключается из "режим аварийной сигнализации → режим предварительного торможения → режим основного торможения", начинается. Когда определяется то, что "TTC ≤ TTC2", управление автоматическим торможением, в котором режим переключается из "режим предварительного торможения (аварийный сигнал) → режим основного торможения (аварийный сигнал)", начинается. Когда определяется то, что "TTC ≤ TTC3", управление автоматическим торможением для выполнения режима основного торможения (аварийный сигнал) начинается.
[0067] Когда управление автоматическим торможением начинается на этапе S6, процесс переходит от этапа S6 к этапу S7, и на этапе S7, выполняются сравнение и определение относительно того, совпадает или нет возможный вариант B' пешехода, обнаруженный посредством модуля 1 камеры переднего вида, с объектом D1, обнаруженным посредством отраженных волн из радара 2 миллиметрового диапазона. Помимо этого, в то время как совпадение не установлено, и предварительно определенное время T не истекло, процесс, который переходит от "этап S7 → этап S8 → этап S10", повторяется.
[0068] Когда определяется то, что совпадение установлено, на этапе S8, в то время как процесс, который переходит от "этап S7 → этап S8 → этап S10" повторяется, процесс переходит от "этап S8 → этап S9 → конец". На этапе S9, возможный вариант B' пешехода, обнаруженный посредством модуля 1 камеры переднего вида, определяется в качестве пешехода B, цели управления, допустимое замедление G увеличивается, и управление автоматическим торможением продолжается.
[0069] С другой стороны, если предварительно определенное время T истекает, в то время как процесс, который переходит от "этап S7 → этап S8 → этап S10", повторяется, процесс переходит от этап S10 → этап S11 → конец". На этапе S11, возможный вариант B' пешехода, обнаруженный посредством модуля 1 камеры переднего вида, определяется как не представляющий собой пешехода B, цель управления, и управление автоматическим торможением отменяется.
[0070] Таким образом, в процессе управления автоматическим торможением, когда возможный вариант B' пешехода обнаруживается впереди рассматриваемого транспортного средства на основе сигнала изображения из модуля 1 камеры переднего вида, выполнение управления автоматическим торможением разрешается, с обнаруженным возможным вариантом B' пешехода в качестве цели управления (этап S4). Затем, после начала управления автоматическим торможением, выполняются сравнение и определение относительно того, совпадает или нет возможный вариант B' пешехода, обнаруженный посредством модуля 1 камеры переднего вида, с объектом D1, обнаруженным посредством отраженных волн из радара 2 миллиметрового диапазона (этап S7). Затем если совпадение установлено до того, как предварительно определенное время T истекает, управление автоматическим торможением продолжается (этап S9), и если совпадение не установлено до того, как предварительно определенное время T истекает, управление автоматическим торможением отменяется (этап S11).
[0071] Операция управления автоматическим торможением
Ниже описывается операция управления автоматическим торможением, когда пешеход B пересекает в позиции переднего направления на прогнозном пути рассматриваемого транспортного средства A, как проиллюстрировано на фиг. 7, со ссылкой на фиг. 11. На фиг. 11, продольное расстояние означает расстояние между рассматриваемым транспортным средством A и возможным вариантом B' пешехода (пешеходом B) в вертикальном направлении по фиг. 7, и продольное расстояние=0 становится расстоянием контакта в продольном направлении. Поперечное расстояние означает расстояние между рассматриваемым транспортным средством A и возможным вариантом B' пешехода (пешеходом B) в поперечном направлении, и поперечное расстояние=0 становится расстоянием контакта в поперечном направлении.
[0072] Когда возможный вариант B' пешехода, который присутствует впереди рассматриваемого транспортного средства A, обнаружен на основе сигнала изображения из модуля 1 камеры переднего вида во время t1, выполнение управления автоматическим торможением разрешается, и мониторинг прогнозного времени TTC до контакта начинается. Когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC1 аварийной сигнализации во время t2, управление автоматическим торможением посредством использования аварийного сигнала начинается, и определение совпадения между обнаруженным возможным вариантом B' пешехода и объектом D1, обнаруженным посредством отраженных волн из радара 2 миллиметрового диапазона, начинается. Когда определяется то, что совпадение установлено посредством определения совпадения при предварительном торможении во время t3 (флаг совпадения при предварительном торможении включен), управление автоматическим торможением, которое начато с возможным вариантом B' пешехода в качестве цели управления, продолжается до предварительного торможения. После этого, когда определяется то, что совпадение установлено посредством определения совпадения при основном торможении во время t4 (флаг совпадения при основном торможении включен), возможный вариант B' пешехода подтверждается в качестве пешехода B в качестве цели управления, и управление автоматическим торможением продолжается до тех пор, пока основное торможение не будет проведено. После этого, когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC2 предварительного торможения во время t5, управление автоматическим торможением посредством использования аварийного сигнала и предварительного торможения начинается. Кроме того, когда прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC3 основного торможения во время t6, управление автоматическим торможением посредством использования аварийного сигнала и основного торможения начинается. После этого, когда замедление G увеличивается посредством основного торможения, и время t7 достигнуто, рассматриваемое транспортное средство A останавливается непосредственно перед пешеходом B.
[0073] Таким образом, в первом варианте осуществления, когда объект, который присутствует впереди рассматриваемого транспортного средства A, обнаружен в качестве возможного варианта B' пешехода на основе сигнала изображения из модуля 1 камеры переднего вида, выполнение управления автоматическим торможением разрешается, с обнаруженным возможным вариантом B' пешехода в качестве цели управления. Затем определение совпадения выполняется между возможным вариантом B' пешехода, обнаруженным посредством модуля 1 камеры переднего вида, и объектом D1, обнаруженным посредством отраженных волн из радара 2 миллиметрового диапазона.
[0074] Соответственно, время начала управления автоматическим торможением становится более ранним по сравнению с ожиданием сравнительных результатов определения пешехода B как из модуля 1 камеры переднего вида, так и из радара 2 миллиметрового диапазона. После этого, определение совпадения выполняется между возможным вариантом B' пешехода, обнаруженным посредством модуля 1 камеры переднего вида, и объектом D1, обнаруженным посредством отраженных волн из радара 2 миллиметрового диапазона, и определяется то, следует или нет продолжать управление автоматическим торможением, на основе результата определения совпадения. Соответственно, обеспечивается функция для предотвращения ошибочного определения пешехода B.
[0075] Операция процесса определения совпадения
Ниже описывается операция процесса определения совпадения на основе блок-схемы последовательности операций способа по фиг. 6. Если возможный вариант B' пешехода обнаруживается посредством модуля 1 камеры переднего вида, но отличается от ранее обнаруженного возможного варианта B' пешехода, процесс переходит от "этап S71 → этап S72 → этап S73 → этап S74" на блок-схеме последовательности операций способа по фиг. 6. На этапе S74, оценка инициализируется, процесс возвращается из этапа S74 на этап S71, и выполняется обработка сброса определения совпадения.
[0076] Если возможный вариант B' пешехода обнаруживается посредством модуля 1 камеры переднего вида, и предыдущий и текущий возможный вариант B' пешехода являются идентичными, процесс переходит от "этап S71 → этап S72 → этап S73 → этап S75 → этап S76 → этап S77" на блок-схеме последовательности операций способа по фиг. 6. На этапе S77, определяется то, меньше или равна либо нет разность dA углов между углом обнаружения возможного варианта B' пешехода, обнаруженного посредством модуля 1 камеры переднего вида, и углом обнаружения ближайшего объекта D1, обнаруженного посредством радара 2 миллиметрового диапазона, предварительно определенному значению. Если определено то, что "разность dA углов > предварительно определенное значение", на этапе S77, процесс переходит к этапу S78, и на этапе S78, оценка нормальной области суммируется. Если определено то, что "разность dA углов < предварительно определенное значение", на этапе S77, процесс переходит к этапу S79, и на этапе S79, оценка расширенной области суммируется.
[0077] После этого, когда оценка нормальной области или расширенной области суммируется на этапе S78 или этапе S79, процесс переходит к этапу S80, и на этапе S80, определяется то, превышает или нет суммированная оценка пороговое значение. В то время, когда "оценка ≤ пороговое значение" удовлетворяется в определении этапа S80, процесс переходит от "этап S80 → этап S81 → конец", и на этапе S81, результат определения совпадения, указывающий то, что совпадение не установлено, выводится. После этого, когда "оценка > пороговое значение" удовлетворяется в определении этапа S80, процесс переходит от "этап S80 → этап S82 → конец", и на этапе S82, результат определения совпадения, указывающий то, что совпадение установлено, выводится.
[0078] Таким образом, в процессе определения совпадения первого варианта осуществления, когда возможный вариант B' пешехода обнаруживается посредством модуля 1 камеры переднего вида, область C для определения совпадения задается с позицией обнаруженного возможного варианта B' пешехода в качестве центральной точки. После этого, когда позиция объекта D1, который является ближайшим к возможному варианту B' пешехода, обнаруженному посредством радара 2 миллиметрового диапазона, присутствует в области C для определения совпадения в течение предварительно определенного периода времени, и совпадение установлено (этап S82), возможный вариант B' пешехода определяется в качестве пешехода B. Кроме того, если разность dA углов между углом обнаружения возможного варианта B' пешехода и углом обнаружения объекта D1 меньше или равна предварительно определенному значению ("Да" на этапе S77), область C для определения совпадения задается равной области C' для определения совпадения, которая расширена из нормальной области в продольном направлении (этап S79).
[0079] Операция определения совпадения
В качестве примера сценария, в котором предпочтительно ускорять определение пешехода B, ниже описывается операция определения совпадения для сценария, в котором пешеход B выбегает впереди рассматриваемого транспортного средства A и на прогнозный курс рассматриваемого транспортного средства A из остановленного транспортного средства E (мертвой зоны), со ссылкой на фиг. 12.
[0080] В сценарии, в котором пешеход B выбегает на прогнозный путь движения рассматриваемого транспортного средства A из остановленного транспортного средства E, если определение пешеходов выполняется на основе информации из модуля 1 камеры переднего вида, можно определять присутствие пешехода посредством использования распознавания формы. Тем не менее, если обнаружение объектов (обнаружение пешеходов) выполняется на основе информации из радара 2 миллиметрового диапазона, поскольку остановленное транспортное средство E и пешеход B обнаруживаются в качестве интегрального объекта, как проиллюстрировано в правой части по фиг. 12, определение пешеходов не может начинаться до тех пор, пока достаточно времени не истечет, чтобы обеспечивать то, что существует достаточное пространство между остановленным транспортным средством E и пешеходом B.
[0081] Напротив, когда возможный вариант B' пешехода обнаруживается посредством модуля 1 камеры переднего вида, область C1 для определения совпадения при предварительном торможении задается с позицией обнаруженного возможного варианта B' пешехода в качестве центральной точки. После этого, когда позиция объекта D1, который является ближайшим к возможному варианту B' пешехода, обнаруженному посредством радара 2 миллиметрового диапазона, присутствует в области C1 для определения совпадения при предварительном торможении в течение предварительно определенного периода времени, и совпадение установлено, возможный вариант B' пешехода определяется в качестве пешехода B. Следовательно, определение пешехода B выполняется более быстро по сравнению со случаем, в котором приоритезировано обнаружение объектов посредством радара 2 миллиметрового диапазона.
[0082] Кроме того, если управление автоматическим торможением начинается после ожидания до тех пор, пока флаг совпадения при предварительном торможении не будет включен, начало управления автоматическим торможением задерживается, к примеру, начало предварительного торможения после времени t2, как проиллюстрировано на фиг. 12. Напротив, если возможный вариант B' пешехода обнаруживается на основе информации из модуля 1 камеры переднего вида, и если выполнение управления автоматическим торможением разрешается без ожидания включения флага совпадения при предварительном торможении, выполнение управления автоматическим торможением разрешается, например, во время t0. Соответственно, управление автоматическим торможением начинается раньше, к примеру, начало предварительного торможения во время t1.
[0083] Затем, в качестве примера сценария, в котором предпочтительно можно предотвращать ошибочное определение в определении совпадения пешехода B, ниже описывается операция автоматического торможения для сценария, в котором выхлопной газ G с белым дымом испускается из едущего впереди транспортного средства F, которое присутствует на прогнозном пути впереди рассматриваемого транспортного средства A, со ссылкой на фиг. 13.
[0084] В сценарии, в котором выхлопной газ G с белым дымом испускается из едущего впереди транспортного средства F, в случае обнаружения объектов на основе информации из модуля 1 камеры переднего вида, возникают случаи, в которых выхлопной газ G с белым дымом ошибочно обнаруживается в качестве пешехода вследствие использования распознавания формы, как проиллюстрировано в правой части по фиг. 13. С другой стороны, когда обнаружение объектов на основе информации из радара 2 миллиметрового диапазона выполняется, поскольку используются отраженные волны излучаемых миллиметровых волн, выхлопной газ G с белым дымом не должен ошибочно обнаруживаться в качестве пешехода.
[0085] Следовательно, когда возможный вариант B' пешехода обнаруживается на основе информации из модуля 1 камеры переднего вида, и прогнозное время TTC до контакта становится меньше или равным пороговому значению TTC2 предварительного торможения, даже если предварительное торможение начинается во время t1, радар 2 миллиметрового диапазона не обнаруживает объект, и предварительно определенное время T истекает, в то время как флаг совпадения при предварительном торможении остается выключенным. Соответственно, управление автоматическим торможением отменяется во время t2, после чего тормозная сила, которая прикладывается посредством предварительного торможения, постепенно уменьшается, и фактическая отмена тормозной силы достигается во время t3.
[0086] Характерная операция определения совпадения
В первом варианте осуществления, когда возможный вариант B' пешехода обнаруживается в позиции впереди рассматриваемого транспортного средства A на основе сигнала изображения из модуля 1 камеры переднего вида, область C для определения совпадения задается с позицией обнаруженного возможного варианта B' пешехода в качестве центральной точки. Когда позиция объекта D1, ближайшего к возможному варианту B' пешехода, из множества объектов, обнаруженных посредством отраженных волн из радара 2 миллиметрового диапазона, присутствует в области C для определения совпадения, и совпадение установлено, возможный вариант B' пешехода определяется в качестве пешехода B.
[0087] Таким образом, когда пешеход B, который находится впереди рассматриваемого транспортного средства A, обнаружен посредством использования модуля 1 камеры переднего вида и радара 2 миллиметрового диапазона, модуль 1 камеры переднего вида и радар 2 миллиметрового диапазона имеют следующие преимущества и недостатки.
[0088] Модуль 1 камеры переднего вида имеет такое преимущество, что можно различать и обнаруживать движущийся объект, который имеет человеческую форму, в качестве пешехода посредством использования распознавания формы. Тем не менее, имеется такой недостаток, что возникают случаи, в которых объекты ошибочно обнаруживаются, к примеру, при плохой погоде, когда горит задняя подсветка впереди, когда объект смешивается с цветами фона, когда имеются дорожные маркеры, и когда дым выхлопных газов является чрезвычайно плотным.
[0089] С другой стороны, радар 2 миллиметрового диапазона имеет такое преимущество, что он может обнаруживать объект, который находится на относительно большом расстоянии, на него оказывает относительно небольшое влияние плохая погода, и задняя подсветка не представляет собой проблему; в силу этого способность к распознаванию объектов больше по сравнению с модулем 1 камеры переднего вида, когда объект присутствует впереди рассматриваемого транспортного средства. Тем не менее, существует такой недостаток, что практически невозможно отличать то, представляет собой объект едущее впереди транспортное средство или пешехода.
[0090] Относительно преимуществ и недостатков модуля 1 камеры переднего вида и радара 2 миллиметрового диапазона, описанных выше: когда возможный вариант B' пешехода обнаруживается на основе информации камеры, которая допускает независимое обнаружение пешехода посредством использования распознавания формы, область C для определения совпадения задается заранее с возможным вариантом B' пешехода в качестве центральной точки. Затем, когда пешеход B присутствует впереди рассматриваемого транспортного средства A, объект D1, который обнаруживается посредством радара 2 миллиметрового диапазона, который имеет большую способность к распознаванию объектов, чем модуль 1 камеры переднего вида, используется для определения совпадения с пешеходом B, чтобы за счет этого определять пешехода B за короткий период времени. Кроме того, когда определение совпадения возможного варианта B' пешехода выполняется посредством добавления такого временного условия, что возможный вариант пешехода присутствует в области C для определения совпадения в течение предварительно определенного периода времени, ошибочное определение, вызываемое посредством мгновенного совпадения, исключается, и пешеход B точно определяется.
[0091] В первом варианте осуществления, область C для определения совпадения разделяется на множество концентрических зон посредством множества линий L1, L2, L3 оценки с возможным вариантом B' пешехода в центральной точке. Карта оценок имеет такую конфигурацию, в которой оценки на положительной стороне, которые увеличиваются с уменьшением расстояния до центральной точки, назначаются области в пределах линии L3 оценки на границе области, и оценка на отрицательной стороне выделяется области за пределами линии L3 оценки на границе области. Когда значение, полученное посредством суммирования оценки в расчете на один цикл управления для выполнения определения совпадения, становится больше или равным предварительно определенному пороговому значению, возможный вариант B' пешехода определяется в качестве пешехода B посредством установленного совпадения.
Например, если время определения совпадения, в течение которого объект D1 присутствует в области для определения совпадения, задается равным фиксированному времени, когда соответствие между возможным вариантом B' пешехода и объектом D1 является высоким, определение установленного совпадения задерживается. С другой стороны, если соответствие между возможным вариантом B' пешехода и объектом D1 является низким, возникает риск того, что установленное совпадение определяется, даже если имеется вероятность того, что совпадение не установлено.
Напротив, посредством использования определения совпадения, которое использует суммированное значение оценок, установленное совпадение может определяться раньше, когда соответствие между возможным вариантом B' пешехода и объектом D1 является высоким, и точность определения совпадения обеспечивается. С другой стороны, когда соответствие между возможным вариантом B' пешехода и объектом D1 является низким, и точность определения совпадения не обеспечивается, определение установленного совпадения задерживается.
Следовательно, когда определение совпадения выполняется, скорость реакции при определении повышается, когда соответствие между возможным вариантом B' пешехода и объектом D1 является высоким, и точность определения повышается, когда соответствие является низким.
[0092] В первом варианте осуществления, разность dA углов между углом обнаружения возможного варианта B' пешехода, обнаруженного посредством модуля 1 камеры переднего вида, и углом обнаружения объекта D1, обнаруженного посредством радара 2 миллиметрового диапазона, получается. Когда разность dA углов составляет предварительно определенное значение или меньше, область C для определения совпадения, которая используется, когда разность dA углов превышает предварительно определенное значение, переключается в область C' для определения совпадения, которая расширена в продольном направлении, которое представляет собой продольное направление рассматриваемого транспортного средства A.
Причина использования расширенной области C' для определения совпадения состоит в том, что когда модуль 1 камеры переднего вида обнаруживает возможный вариант B' пешехода, пикселы становятся более грубыми по мере того, как расстояние от возможного варианта B' пешехода увеличивается вследствие характеристик камеры, что создает ошибку в расстоянии между рассматриваемым транспортным средством A и пешеходом B в направлении по оси Y. Следовательно, позиция возможного варианта B' пешехода, обнаруженного посредством модуля 1 камеры переднего вида, отделена от позиции объекта D1, обнаруженного посредством радара 2 миллиметрового диапазона, и определение совпадения не может выполняться в нормальной области C для определения совпадения. Тем не менее, если позиция возможного варианта B' пешехода и позиция объекта D1 находятся в идентичном направлении (например, разность углов составляет в пределах 5 градусов), определение совпадения становится возможным посредством использования расширенной области C' для определения совпадения.
Следовательно, когда определение совпадения выполняется, определение совпадения становится возможным даже на больших расстояниях между рассматриваемым транспортным средством A и возможным вариантом B' пешехода, в состоянии, в котором позиции возможного варианта B' пешехода и объекта D1 находятся в идентичном направлении.
[0093] В первом варианте осуществления, область C1 для определения совпадения при предварительном торможении для выполнения определения совпадения, когда рассматриваемое транспортное средство A и пешеход B находятся на первом расстоянии, и область C2 для определения совпадения при основном торможении для выполнения определения совпадения, когда рассматриваемое транспортное средство A и пешеход B находятся на втором расстоянии, которое меньше первого расстояния, имеющая меньшую площадь, чем первая область для определения совпадения, задаются в качестве областей C для определения совпадения.
Таким образом, ошибка по расстоянию для возможного варианта B' пешехода согласно модулю 1 камеры переднего вида увеличивается по мере того, как расстояние между рассматриваемым транспортным средством A и возможным вариантом B' пешехода увеличивается, и возникают случаи, в которых определение совпадения задерживается. Соответственно, область C1 для определения совпадения при предварительном торможении, которая используется для определения совпадения на большом расстоянии с широкой областью, и область C2 для определения совпадения при основном торможении, которая используется для определения совпадения на небольшом расстоянии с узкой областью, задаются в качестве областей C для определения совпадения.
Следовательно, когда определение совпадения выполняется, задержка в определении совпадения предотвращается независимо от того, является расстояние между рассматриваемым транспортным средством A и возможным вариантом B' пешехода большим или небольшим.
[0094] Первый вариант осуществления применяется к системе управления автоматическим торможением, в которой когда определяется то, что рассматриваемое транспортное средство A и пешеход B могут входить в контакт, предварительное торможение посредством использования медленного торможения выполняется, и если вероятность контакта увеличивается во время предварительного торможения, основное торможение посредством использования резкого торможения выполняется таким образом, чтобы предотвращать контакт между рассматриваемым транспортным средством A и пешеходом B. Первая область для определения совпадения представляет собой область C1 для определения совпадения при предварительном торможении, которая используется для определения пешеходов, когда предварительное торможение выполняется, и вторая область для определения совпадения представляет собой область C2 для определения совпадения при основном торможении, которая используется для определения пешеходов, когда основное торможение выполняется.
Таким образом, в управлении автоматическим торможением, необходимо то, что выполнение предварительного торможения посредством использования определения пешеходов разрешается до того, как начальное условие для предварительного торможения устанавливается, и необходимо то, что выполнение основного торможения посредством использования определения пешеходов разрешается до того, как начальное условие для основного торможения устанавливается. Следовательно, посредством выполнения определения совпадения с использованием области C1 для определения совпадения при предварительном торможении и области C2 для определения совпадения при основном торможении, которые имеют различные области, можно гарантировать разрешения для выполнения предварительного торможения и основного торможения согласно определению того, что совпадение установлено до начала предварительного торможения и основного торможения, когда управление автоматическим торможением выполняется.
[0095] Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться согласно способу определения и устройству определения пешеходов первого варианта осуществления.
[0096] (1) Предоставляются датчики распознавания внешнего окружения, которые получают информацию переднего направления рассматриваемого транспортного средства A, чтобы определять то, что пешеход B присутствует в позиции переднего направления рассматриваемого транспортного средства A, с использованием датчиков распознавания внешнего окружения.
В этом способе определения пешеходов, камера (модуль 1 камеры переднего вида) и радар (радар 2 миллиметрового диапазона) предоставляются в качестве датчиков распознавания внешнего окружения.
Когда возможный вариант B' пешехода обнаруживается в позиции переднего направления рассматриваемого транспортного средства A на основе сигнала изображения из камеры (модуля 1 камеры переднего вида), область C для определения совпадения задается с позицией обнаруженного возможного варианта B' пешехода в качестве центральной точки.
Когда позиция объекта D1, который является ближайшим к возможному варианту B' пешехода, из множества объектов D1, D2, D3, обнаруженных посредством отраженных волн из радара (радара 2 миллиметрового диапазона), присутствует в области C для определения совпадения, и совпадение установлено, возможный вариант B' пешехода определяется в качестве пешехода B (фиг. 6).
Соответственно, можно предоставлять способ определения пешеходов, который повышает скорость реакции при определении пешеходов при определении пешехода B с использованием камеры (модуля 1 камеры переднего вида) и радара (радара 2 миллиметрового диапазона) при движении.
[0097] (2) Определяется то, что совпадение установлено, когда время, в течение которого объект D1, который является ближайшим к возможному варианту B' пешехода, присутствует в области C для определения совпадения, находится в пределах предварительно определенного периода времени или более (фиг. 6).
Соответственно, помимо преимущества (1), можно повышать скорость реакции при определении пешеходов, при обнаружении пешехода B с использованием камеры (модуля 1 камеры переднего вида) и радара (радара 2 миллиметрового диапазона).
[0098] (3) Область C для определения совпадения разделяется на множество концентрических зон посредством множества линий L1, L2, L3 оценки, центрированных вокруг возможного варианта B' пешехода, и карта оценок имеет такую конфигурацию, в которой оценки на положительной стороне, которые увеличиваются с уменьшением расстояния от центральной точки, назначаются области в пределах линии L3 оценки на границе области, и оценка на отрицательной стороне назначается области за пределами линии L3 оценки на границе области.
Когда значение, полученное посредством суммирования оценки в расчете на один цикл управления для выполнения определения совпадения, становится больше или равным предварительно определенному пороговому значению, возможный вариант B' пешехода определяется в качестве пешехода B посредством установленного совпадения (фиг. 9, 10).
Соответственно, помимо преимущества (1) или (2), когда определение совпадения выполняется, скорость реакции при определении пешеходов повышается, когда соответствие между возможным вариантом B' пешехода и объектом D1 является высоким, и точность определения повышается, когда соответствие является низким.
[0099] (4) Когда разность dA углов между углом обнаружения возможного варианта B' пешехода, обнаруженного посредством камеры (модуля 1 камеры переднего вида), и углом обнаружения объекта D1, обнаруженного посредством радара (радара 2 миллиметрового диапазона), составляет предварительно определенное значение или меньше, область C для определения совпадения, которая используется, когда разность dA углов превышает предварительно определенное значение, переключается в область C' для определения совпадения, которая расширена в продольном направлении, которое представляет собой продольное направление рассматриваемого транспортного средства A (фиг. 8-10).
Соответственно, помимо преимуществ (1)-(3), когда определение совпадения выполняется, определение совпадения может выполняться даже на больших расстояниях между рассматриваемым транспортным средством A и возможным вариантом B' пешехода, в состоянии, в котором позиции возможного варианта B' пешехода и объекта D1 находятся в идентичном направлении.
[0100] (5) Первая область для определения совпадения (область C1 для определения совпадения при предварительном торможении) для выполнения определения совпадения, когда рассматриваемое транспортное средство A и пешеход B находятся на первом расстоянии, и вторая область для определения совпадения (область C2 для определения совпадения при основном торможении) для выполнения определения совпадения, когда рассматриваемое транспортное средство A и пешеход B находятся на втором расстоянии, которое меньше первого расстояния, имеющая меньшую площадь, чем первая область для определения совпадения, задаются в качестве областей C для определения совпадения (фиг. 2).
Соответственно, помимо преимуществ (1)-(4), когда определение совпадения выполняется, задержки в определении совпадения предотвращаются независимо от того, является расстояние между рассматриваемым транспортным средством A и возможным вариантом B' пешехода большим или небольшим.
[0101] (6) Способ применяется к системе управления автоматическим торможением, в которой при определении того, что рассматриваемое транспортное средство A может входить в контакт с пешеходом B, предварительное торможение посредством использования медленного торможения выполняется, и если вероятность контакта увеличивается во время предварительного торможения, основное торможение посредством использования резкого торможения выполняется, чтобы за счет этого предотвращать контакт между рассматриваемым транспортным средством A и пешеходом B.
Первая область для определения совпадения представляет собой область C1 для определения совпадения при предварительном торможении, которая используется для определения пешеходов при выполнении предварительного торможения.
Вторая область для определения совпадения представляет собой область C2 для определения совпадения при основном торможении, которая используется для определения пешеходов при выполнении основного торможения (фиг. 2).
Соответственно, помимо преимущества (5), можно гарантировать разрешения для выполнения предварительного торможения и основного торможения согласно определению того, что совпадение установлено до начала предварительного торможения и основного торможения при выполнении управления автоматическим торможением.
[0102] (7) Предоставляются датчики распознавания внешнего окружения, которые получают информацию переднего направления рассматриваемого транспортного средства A, и модуль 32 обработки определения совпадения, который определяет то, что пешеход B присутствует в позиции переднего направления рассматриваемого транспортного средства A с использованием датчиков распознавания внешнего окружения.
Это устройство определения пешеходов содержит камеру (модуль 1 камеры переднего вида) и радар (радар 2 миллиметрового диапазона) в качестве датчиков распознавания внешнего окружения.
Модуль 32 обработки определения совпадения выполняет процесс, чтобы задавать область C для определения совпадения с позицией возможного варианта B' пешехода, который обнаружен в качестве центральной точки, когда возможный вариант B' пешехода обнаруживается в позиции переднего направления рассматриваемого транспортного средства A на основе сигнала изображения из камеры (модуля 1 камеры переднего вида).
Затем процесс выполняется для того, чтобы определять то, представляет возможный вариант B' пешехода собой пешехода B или нет, когда позиция объекта D1, который является ближайшим к возможному варианту B' пешехода, из множества объектов D1, D2, D3, обнаруженных посредством отраженных волн из радара (радара 2 миллиметрового диапазона), находится в области C для определения совпадения, и совпадение установлено (фиг. 6).
Соответственно, можно предоставлять устройство определения пешеходов, которое повышает скорость реакции при определении пешеходов при определении пешехода B с использованием камеры (модуля 1 камеры переднего вида) и радара (радара 2 миллиметрового диапазона) в ходе движения.
[0103] Способ определения и устройство определения пешеходов настоящего изобретения описаны выше на основе первого варианта осуществления, но их конкретные конфигурации не ограничены этим первым вариантом осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
[0104] В первом варианте осуществления, представлен пример, в котором модуль 1 камеры переднего вида, который представляет собой одну камеру (монокулярную камеру), используется в качестве камеры. Тем не менее, стереокамера, сконфигурированная из пары камер переднего вида, может использоваться в качестве камеры.
[0105] В первом варианте осуществления, представлен пример, в котором радар 2 миллиметрового диапазона, который излучает миллиметровые волны к передней части транспортного средства, используется в качестве радара. Тем не менее, инфракрасный лазерный радар может использоваться, либо радар миллиметрового диапазона и инфракрасный лазерный радар могут использоваться в комбинации, в качестве радара.
[0106] В первом варианте осуществления, представлен пример, в котором способ определения и устройство определения пешеходов применяются к управлению автоматическим торможением. Тем не менее, способ определения и устройство определения пешеходов могут применяться к другим видам управления помощью при вождении, таким как управление помощью при вождении, которое предотвращает контакт посредством управления рассматриваемым транспортным средством таким образом, чтобы уклоняться от пешехода посредством торможения и руления, при условии, что управление представляет собой управление, в котором пешеход, который присутствует впереди рассматриваемого транспортного средства, представляет собой цель управления.
[0107] В первом варианте осуществления, представлен пример, в котором прямоугольная область C для определения совпадения, заданная с позицией возможного варианта B' пешехода, который определяется посредством модуля 1 камеры переднего вида, в качестве центральной точки, использована в качестве области для определения совпадения для определения совпадения. Тем не менее, область для определения совпадения, имеющая форму, отличающуюся от прямоугольной, к примеру, круглую или эллиптическую, может использоваться в качестве области для определения совпадения для определения совпадения.
[0108] В первом варианте осуществления, представлен пример управления, в котором режим переключается из "режим аварийной сигнализации → режим предварительного торможения → режим основного торможения", в качестве управления автоматическим торможением. Тем не менее, пример может быть таким, что управление автоматическим торможением может быть сконфигурировано только из режима аварийной сигнализации и режима торможения.
[0109] В первом варианте осуществления, представлен пример, в котором способ определения и устройство определения пешеходов настоящего изобретения применяются к транспортному средству с электроприводом, оснащенному системой управления автоматическим торможением и тормозным блоком 4 с электрическим управлением. Тем не менее, способ определения и устройство определения пешеходов настоящего изобретения могут применяться к транспортному средству, оснащенному другой системой управления помощью при вождении, которая предотвращает контакт между рассматриваемым транспортным средством и пешеходом посредством использования управления источником приведения в движение, управления рулением, управления тормозом, отличной от системы управления автоматическим торможением и т.д. Кроме того, в дополнение к транспортному средству с электроприводом, способ определения и устройство определения пешеходов также могут применяться к транспортному средству с приводом от двигателя; в этом случае, например, электромотор электронасоса ABS/VDC-актуатора используется в качестве тормозного актуатора. Другими словами, способ и устройство могут применяться при условии, что способ определения и устройство определения пешеходов используют датчики распознавания внешнего окружения в ходе движения, чтобы определять то, что пешеход присутствует в позиции впереди рассматриваемого транспортного средства.
Перекрестная ссылка на родственные заявки
[0110] Данная заявка испрашивает приоритет на основе заявки на патент (Япония) № 2016-011031, поданной в Патентное бюро Японии 22 января 2016 года, и ее раскрытие сущности полностью содержится в настоящем описании изобретения по ссылке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОМОЩЬЮ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2687196C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ И СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ | 2012 |
|
RU2605812C2 |
| СПОСОБ УПРАВЛЕНИЯ УСТРОЙСТВОМ ОТОБРАЖЕНИЯ И УСТРОЙСТВО ОТОБРАЖЕНИЯ | 2016 |
|
RU2731676C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2020 |
|
RU2740820C1 |
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| УСТРОЙСТВО ВЫДАЧИ УВЕДОМЛЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2702281C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2728885C2 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2017 |
|
RU2742400C1 |
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2719497C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
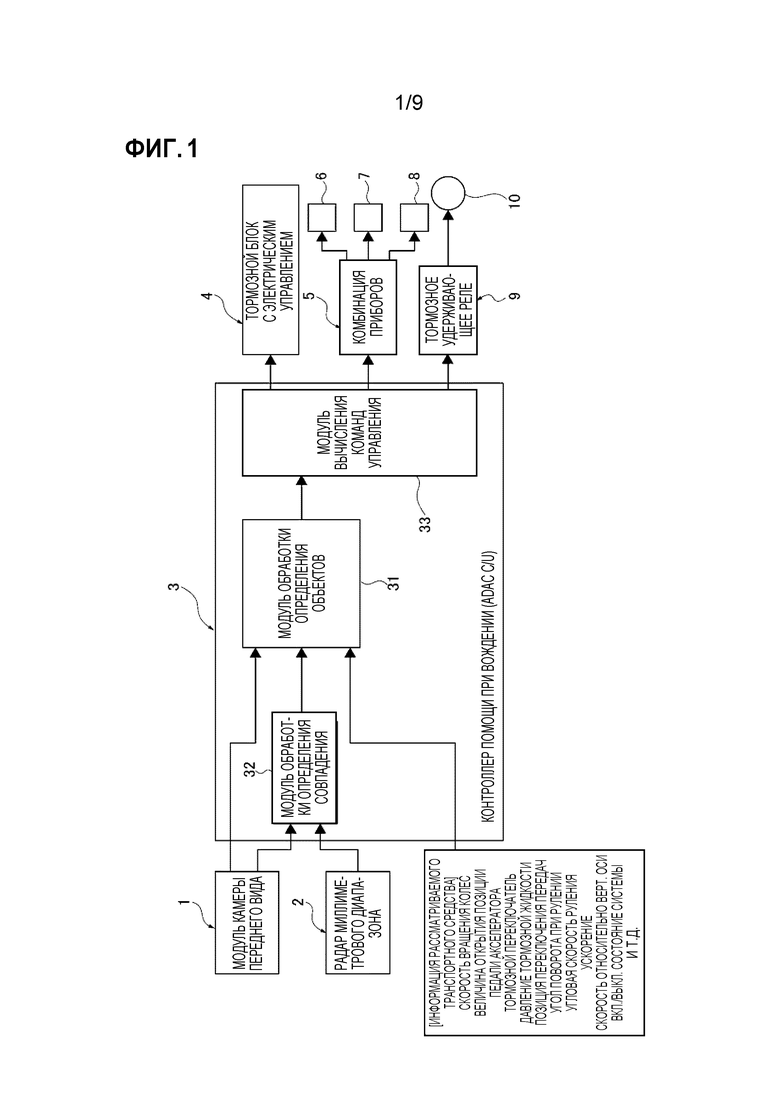
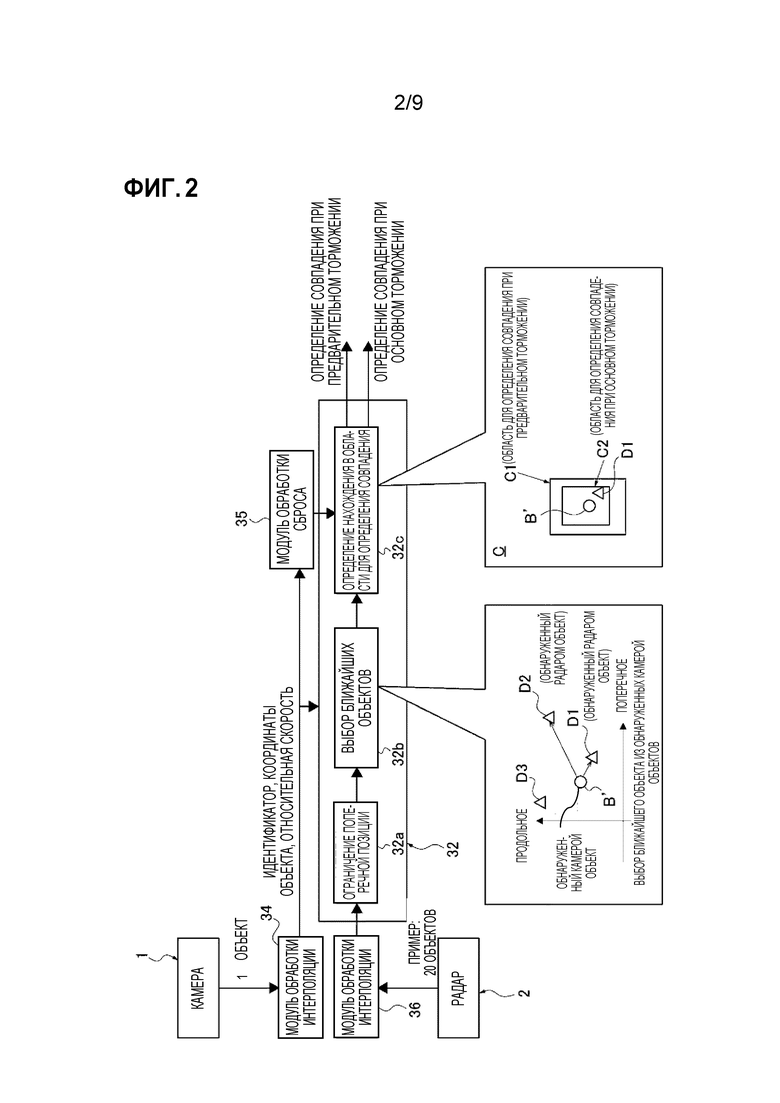
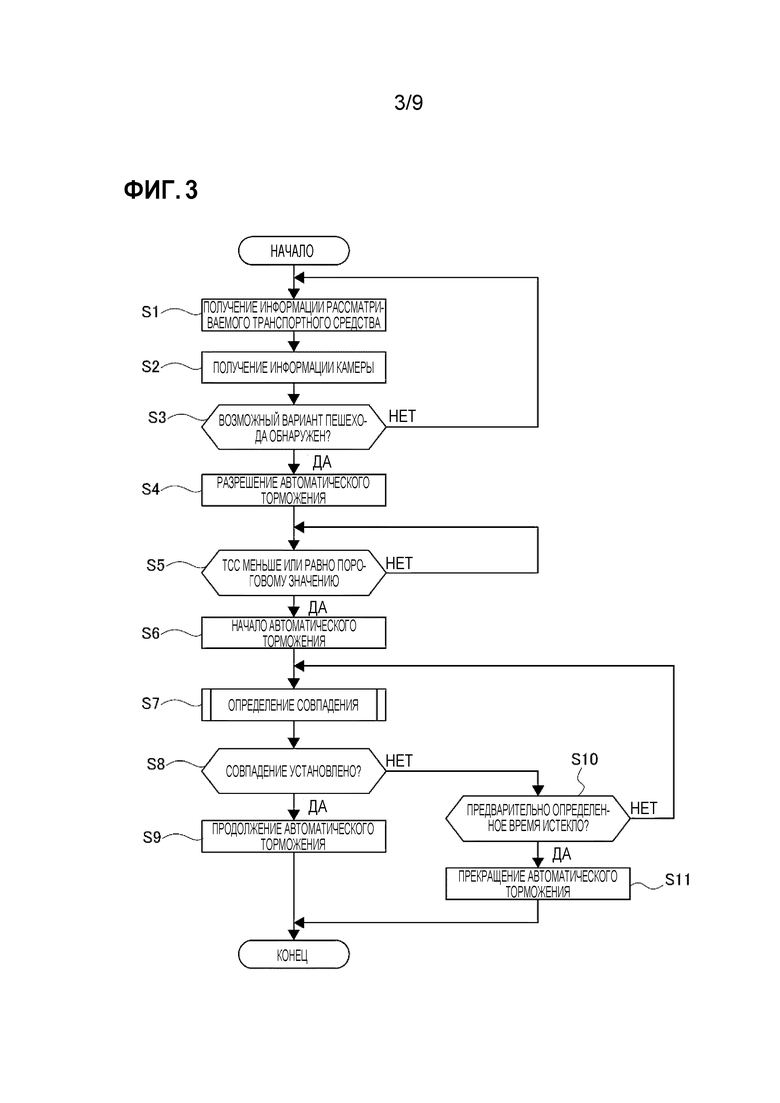
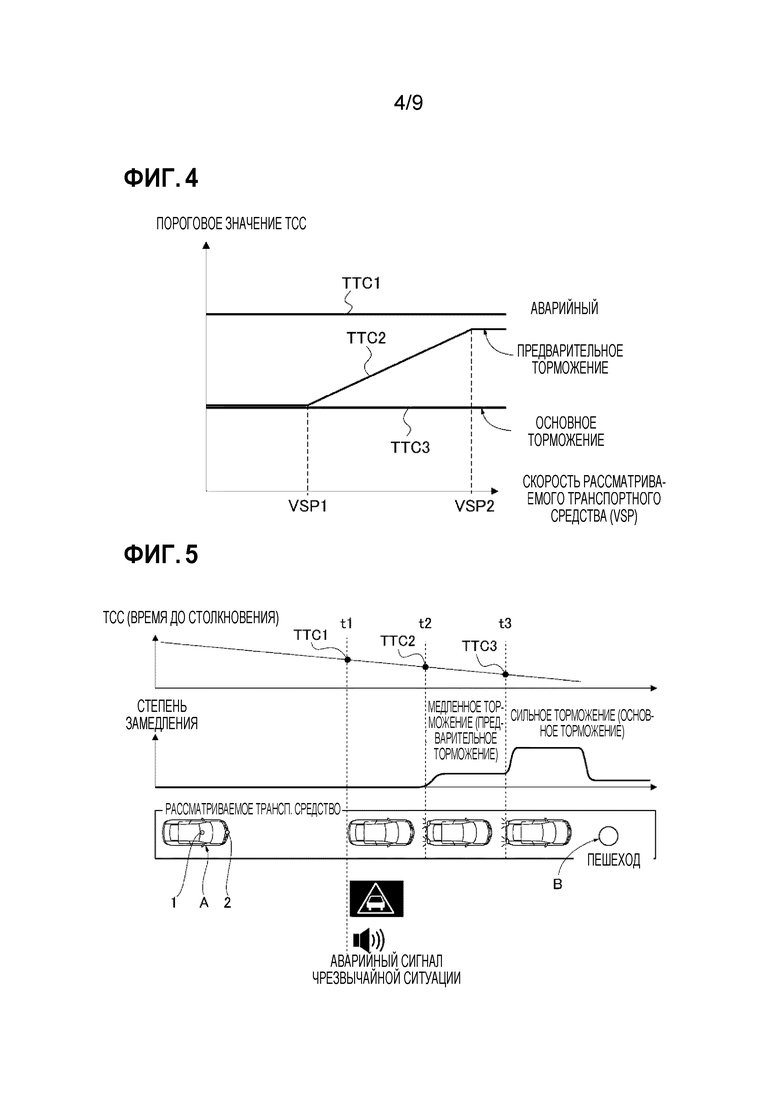
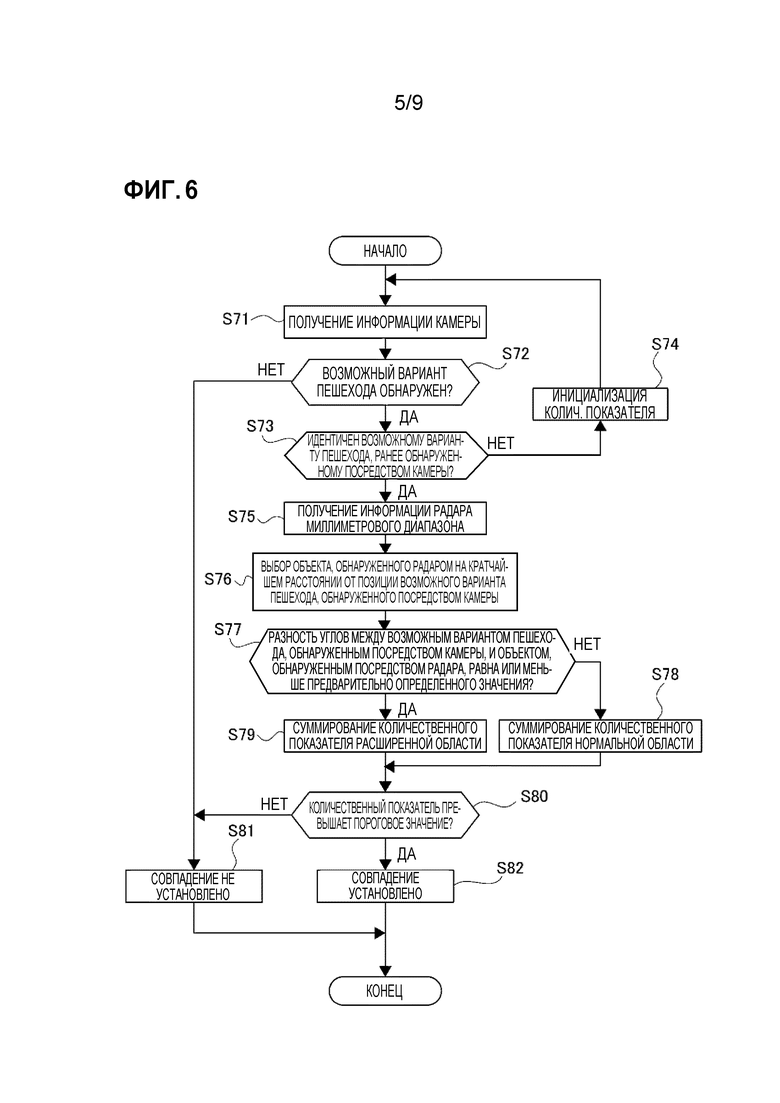
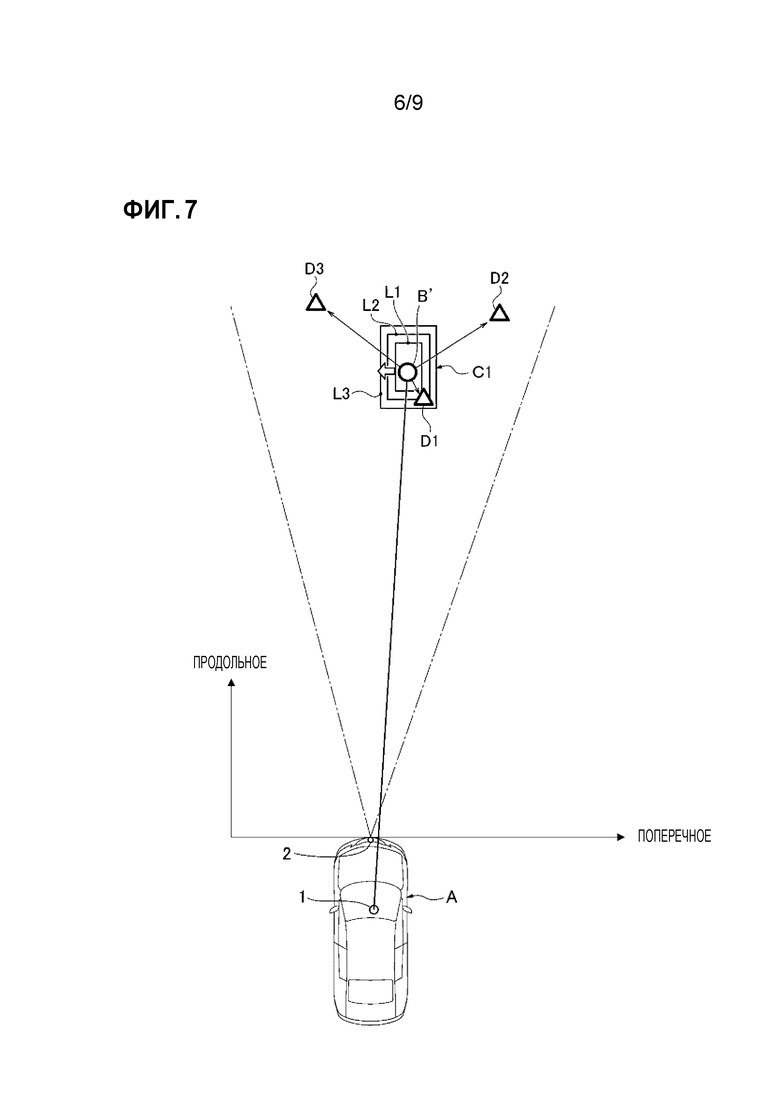
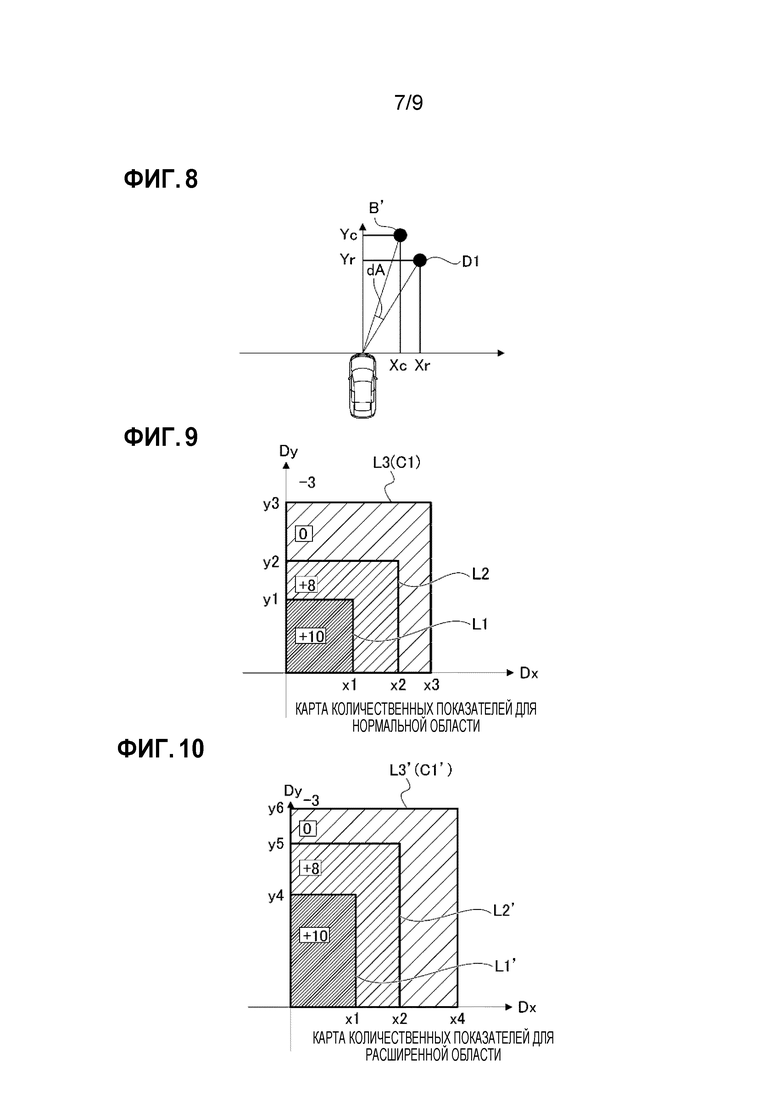
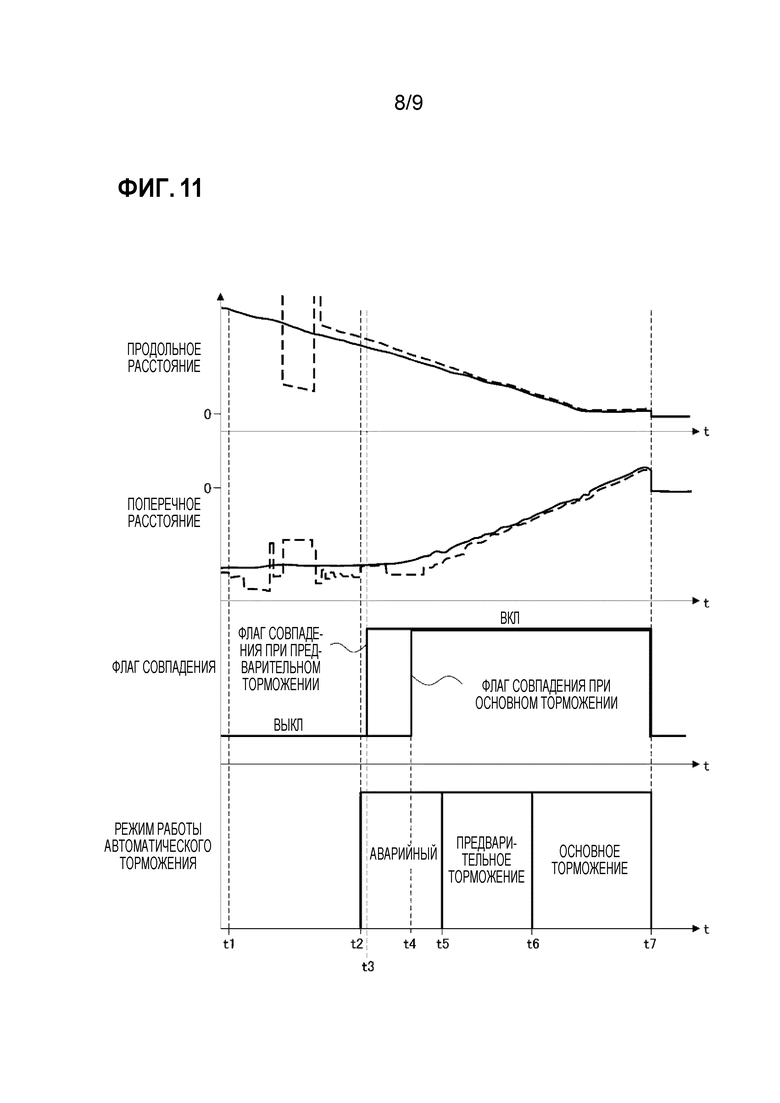
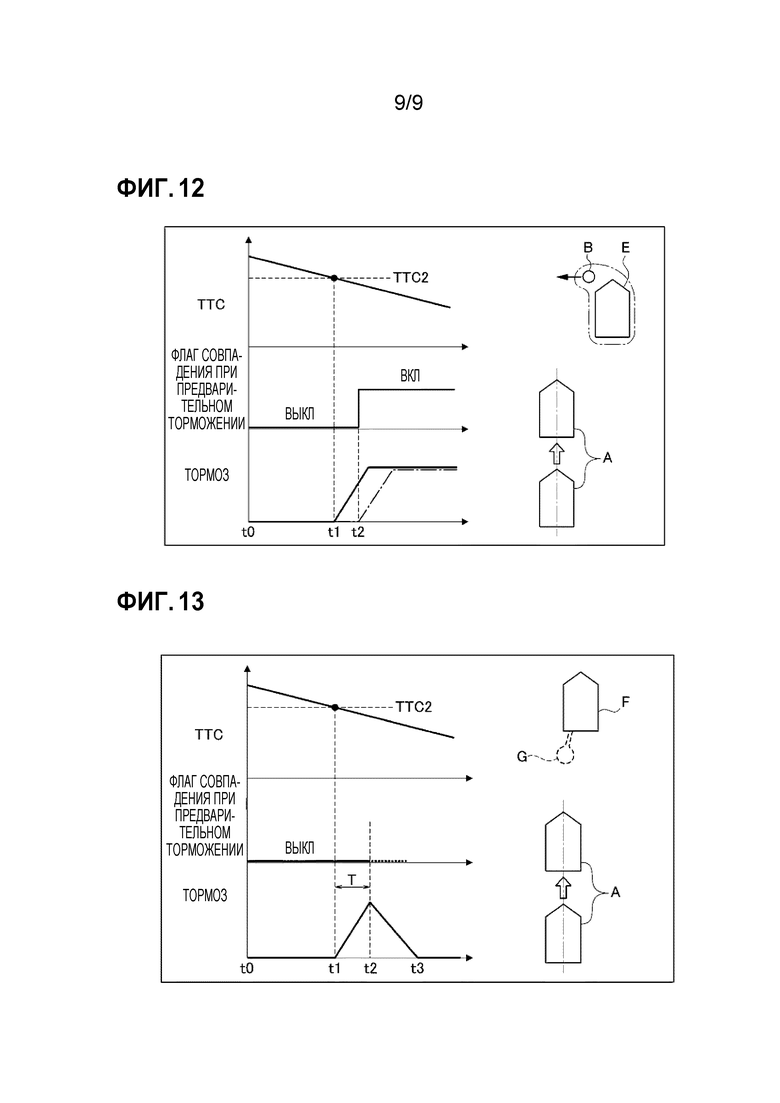
Модуль (1) камеры переднего вида и радар (2) миллиметрового диапазона получают информацию переднего направления для рассматриваемого транспортного средства (A), чтобы определять, что пешеход (B) присутствует в позиции переднего направления рассматриваемого транспортного средства (A). Когда возможный вариант (B') пешехода обнаруживается в позиции переднего направления рассматриваемого транспортного средства (A) на основе сигнала изображения из модуля (1) камеры переднего вида, область (C) для определения совпадения задается с позицией обнаруженного возможного варианта (B') пешехода в качестве центральной точки. Когда позиция объекта (D1), который является ближайшим к возможному варианту (B') пешехода, из множества объектов (D1, D2, D3), обнаруженных посредством отраженных волн из радара (2) миллиметрового диапазона, находится в области (C) для определения совпадения, за счет этого устанавливая совпадение, возможный вариант (B') пешехода определяется в качестве пешехода (B). Улучшается распознавание пешеходов. 3 н. и 5 з.п. ф-лы, 13 ил.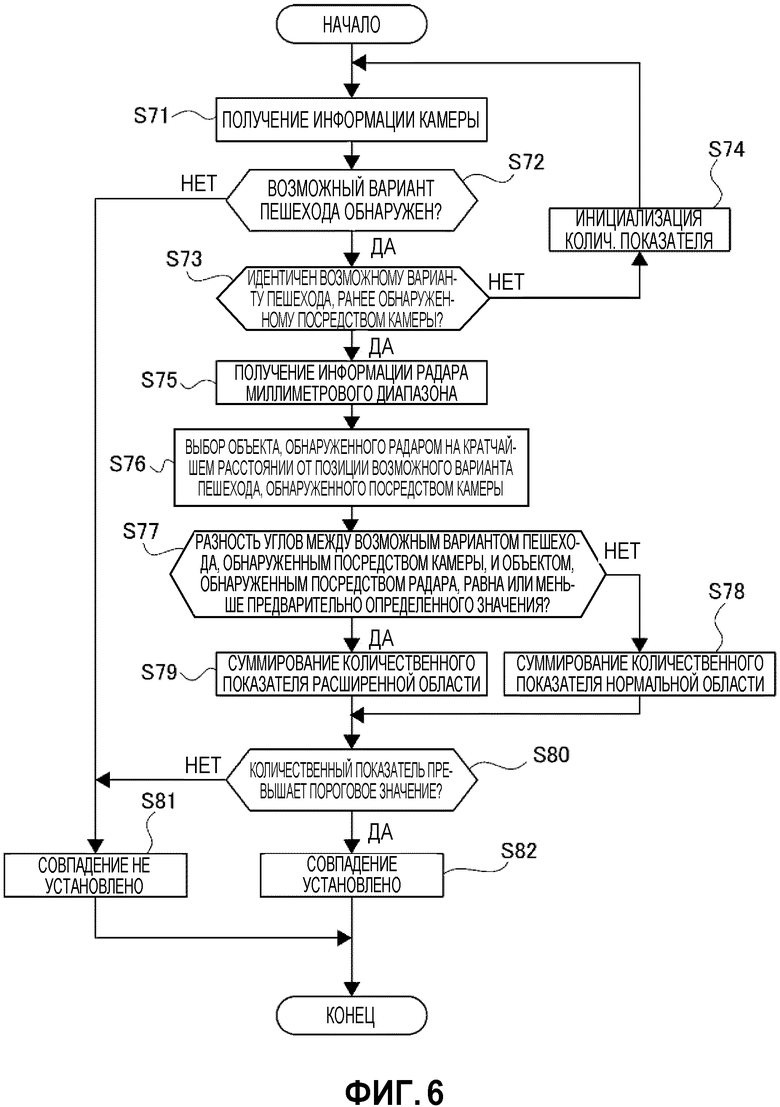
1. Способ определения пешеходов, снабженный датчиками распознавания внешнего окружения, которые получают информацию переднего направления рассматриваемого транспортного средства, и который использует датчики распознавания внешнего окружения для того, чтобы определять, что пешеход присутствует в позиции переднего направления рассматриваемого транспортного средства, при этом способ содержит этапы, на которых:
- предоставляют камеру и радар в качестве датчиков распознавания внешнего окружения;
- задают область для определения совпадения на основе позиции возможного варианта пешехода, который обнаруживается, когда возможный вариант пешехода обнаруживается в позиции переднего направления рассматриваемого транспортного средства на основе сигнала изображения из камеры;
- определяют возможный вариант пешехода в качестве пешехода, когда позиция объекта, ближайшего к возможному варианту пешехода, из множества объектов, обнаруженных посредством отраженных волн из радара, присутствует в области для определения совпадения и совпадение установлено; и
- расширяют область для определения совпадения, когда позиция возможного варианта пешехода и позиция объекта находятся в идентичном направлении.
2. Способ определения пешеходов по п. 1, в котором:
- определяется то, что совпадение установлено, когда время, в течение которого объект, который является ближайшим к возможному варианту пешехода, присутствует в области для определения совпадения, находится в пределах предварительно определенного периода времени или больше.
3. Способ определения пешеходов по п. 1 или 2, в котором:
- область для определения совпадения разделяется на множество концентрических зон посредством множества линий оценки, центрированных вокруг возможного варианта пешехода, и карта оценок имеет такую конфигурацию, в которой оценки на положительной стороне, которые увеличиваются с уменьшением расстояния до центральной точки, назначаются области в пределах линии оценки на границе области и оценка на отрицательной стороне назначается области за пределами линии оценки на границе области, и
- когда значение, полученное посредством суммирования оценки в расчете на один цикл управления для выполнения определения совпадения, становится больше или равным предварительно определенному пороговому значению, возможный вариант пешехода определяется в качестве пешехода посредством установления совпадения.
4. Способ определения пешеходов по любому из пп. 1-3, в котором:
- когда разность углов между углом обнаружения возможного варианта пешехода, обнаруженного посредством камеры, и углом обнаружения объекта, обнаруженного посредством радара, составляет предварительно определенное значение или меньше, область для определения совпадения, которая используется, когда разность углов превышает предварительно определенное значение, переключается в область для определения совпадения, которая расширена в продольном направлении, которое представляет собой продольное направление рассматриваемого транспортного средства.
5. Способ определения пешеходов по любому из пп. 1-4, в котором:
- первая область для определения совпадения для выполнения определения совпадения, когда рассматриваемое транспортное средство и пешеход находятся на первом расстоянии, и вторая область для определения совпадения для выполнения определения совпадения, когда рассматриваемое транспортное средство и пешеход находятся на втором расстоянии, которое меньше первого расстояния, имеющая меньшую площадь, чем первая область для определения совпадения, задаются в качестве областей для определения совпадения.
6. Способ определения пешеходов по п. 5, в котором:
- способ применяется к системе управления автоматическим торможением, в которой при определении того, что рассматриваемое транспортное средство и пешеход могут входить в контакт, выполняется предварительное торможение посредством использования медленного торможения и если вероятность контакта увеличивается во время предварительного торможения, выполняется основное торможение посредством резкого торможения, за счет этого предотвращая контакт между рассматриваемым транспортным средством и пешеходом,
- первая область для определения совпадения представляет собой область для определения совпадения при предварительном торможении, которая используется для определения пешеходов при выполнении предварительного торможения, и
- вторая область для определения совпадения представляет собой область для определения совпадения при основном торможении, которая используется для определения пешеходов при выполнении основного торможения.
7. Способ определения пешеходов, снабженный датчиками распознавания внешнего окружения, которые получают информацию переднего направления рассматриваемого транспортного средства, и который использует датчики распознавания внешнего окружения для того, чтобы определять, что пешеход присутствует в позиции переднего направления рассматриваемого транспортного средства, при этом способ содержит этапы, на которых:
- предоставляют камеру и радар в качестве датчиков распознавания внешнего окружения;
- задают область для определения совпадения на основе позиции возможного варианта пешехода, который обнаруживается после обнаружения возможного варианта пешехода в позиции переднего направления рассматриваемого транспортного средства на основе сигнала изображения из камеры;
- определяют возможный вариант пешехода в качестве пешехода, когда позиция объекта, ближайшего к возможному варианту пешехода, из множества объектов, обнаруженных посредством отраженных волн из радара, присутствует в области для определения совпадения и совпадение установлено; и
- задают в качестве области для определения совпадения первую область для определения совпадения для выполнения определения совпадения, когда рассматриваемое транспортное средство и пешеход отделены на первое расстояние, и вторую область для определения совпадения для выполнения определения совпадения, когда рассматриваемое транспортное средство и пешеход отделены на второе расстояние, которое меньше первого расстояния, имеющую меньшую площадь, чем первая область для определения совпадения.
8. Устройство определения пешеходов, содержащее:
- датчики распознавания внешнего окружения, которые получают информацию переднего направления рассматриваемого транспортного средства; и
- модуль обработки определения совпадения, который определяет, что пешеход присутствует в позиции переднего направления рассматриваемого транспортного средства, с использованием датчиков распознавания внешнего окружения;
при этом:
датчики распознавания внешнего окружения включают в себя камеру и радар; и
модуль обработки определения совпадения выполняет процесс, чтобы задавать область для определения совпадения на основе позиции возможного варианта пешехода, который обнаруживается, после обнаружения возможного варианта пешехода в позиции переднего направления рассматриваемого транспортного средства на основе сигнала изображения из камеры,
определять, что возможный вариант пешехода представляет собой пешехода, когда позиция объекта, ближайшего к возможному варианту пешехода, из множества объектов, обнаруженных посредством отраженных волн из радара, присутствует в области для определения совпадения и совпадение установлено, и
расширять область для определения совпадения, когда позиция возможного варианта пешехода и позиция объекта находятся в идентичном направлении.
| ЦЕНТРОБЕЖНЫЙ ДИСКОВЫЙ ИЗМЕЛЬЧИТЕЛЬ | 2023 |
|
RU2806287C1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

