Изобретение относится к механотерапевтическим аппаратам пассивного действия для разработки коленного и тазобедренного суставов человека с целью увеличения их подвижности в процессе лечения и реабилитации.
Известно устройство для разработки нижней конечности (см. RU 2102056, кл. А61Н 1/02, 20.01.1998), содержащее нагрузочный элемент, соединенный через многосекционный пантограф с подстопником, и корпус с продольной прорезью в крышке, в котором элементы перекрестий штанг пантографа размещены на стойках, установленных с возможностью продольного перемещения путем скольжения по днищу корпуса нижними торцами, имеющими сферическую форму.
Известно устройство для разработки нижних конечностей (см. RU 2085173, кл. А61Н 1/02, 27.07.1997), содержащее П-образную регулируемой длины тягу, шарнирно соединенную с подстопником, оснащенным элементами крепления, установленным на роликах, причем на подстопнике жестко установлен ложемент для голени, оснащенный элементами крепления и упорами, выполненными с возможностью вхождения в механический контакт с П-образной тягой при ее повороте относительно ложемента голени, на П-образной тяге закреплен с возможностью продольного перемещения в двух взаимно перпендикулярных направлениях и фиксации упор в виде перекладины, а ролики своими поверхностями качения установлены на направляющих.
Основным недостатком этих устройств является узкая область применения, связанная с отсутствием современных механических и/или электрических приводов для активного перемещения нижней конечности.
Наиболее близким к данному техническому решению является аппарат для восстановления подвижности суставов человека (см. RU 2139701, кл. А61Н 1/02, 20.10.1999), содержащий неподвижное основание, раму, реверсивный электропривод, соединенный с винтовой парой в виде ходового винта и гайки, коромысла, шарнирно закрепленные на основании, трансмиссию, два ложемента и опору для стопы.
Недостатками указанного устройства являются сложность и узкая область применения: либо в варианте для разработки коленного сустава, либо - голеностопного сустава. Однако, при ряде заболеваний, например при деформирующем артрозе, состоянии после эндопротезирования коленных суставов, пластики передней крестообразной связки необходимо одновременно разрабатывать коленный и тазобедренный суставы.
Недостатком указанного устройства является сложность управления процессом восстановления.
Кроме того, недостатком устройства является отсутствие пульта экстренного останова.
Технический результат, на достижение которого направлено изобретение, заключается в создании простого устройства, позволяющего одновременно разрабатывать коленный и тазобедренный суставы, обеспечивающего легкое и надежное управление процессом.
Указанный технический результат достигается тем, что аппарат для восстановления подвижности суставов человека, содержащий неподвижное основание, раму, реверсивный электропривод, соединенный с винтовой парой в виде ходового винта и гайки, коромысла, шарнирно закрепленные на основании, трансмиссию, два ложемента и опору для стопы, содержит микроконтроллер, датчик положения, концевые выключатели и узел управления реверсивным электроприводом, трансмиссия выполнена в виде двух связанных параллельно расположенных четырехзвенных механизмов, причем коромысла жестко связаны со вторыми звеньями четырехзвенных механизмов, смежных с первыми звеньями, ложемент голени закреплен на раме, ложемент бедра закреплен на третьих звеньях, смежных с первыми звеньями и связанных через четвертые звенья со вторыми звеньями, рама шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения в радиальном направлении относительно оси ходового винта, на основании установлены концевые выключатели, фиксирующие крайние положения каретки, на четырехзвенный механизм установлен датчик положения, микроконтроллер связан с узлом управления реверсивным электроприводом, выход которого соединен с реверсивным электроприводом, а концевые выключатели связаны с микроконтроллером.
Указанный технический результат достигается также тем, что аппарат содержит панель управления, на которой расположены электрически связанные с микроконтроллером индикатор текущего значения угла сгибания и установленных значений минимального и максимального углов сгибания, регулятор минимального угла сгибания, регулятор максимального угла сгибания, регулятор выдержки при минимальном угле сгибания, регулятор выдержки при максимальном угле сгибания, регулятор скорости изменения угла сгибания и регулятор начальной установки угла сгибания.
Указанный технический результат достигается также тем, что устройство содержит выносной пульт экстренной остановки.
На чертеже изображена кинематическая схема устройства.
На чертеже приняты следующие обозначения:
1 - неподвижное основание;
2 - рама;
3 - реверсивный электропривод;
4 - ходовой винт;
5 - гайка;
6 - коромысло;
7 - первое звено;
8 - второе звено;
9 - третье звено;
10 - четвертое звено;
11 - ложемент голени;
12 - ложемент бедра;
13 - опора стопы;
14 - ось опоры стопы;
15 - каретка;
16 - направляющая;
17 - муфта;
18 - концевой выключатель;
19 - датчик положения;
20 - контроллер;
21 - узел управления реверсивным электроприводом;
22 - выносной пульт экстренного отключения реверсивного электропривода;
23 - индикатор текущего значения угла сгибания и установленных значений минимального и максимального углов сгибания;
24 - регулятор минимального угла сгибания;
25 - регулятор максимального угла сгибания;
26 - регулятор выдержки при минимальном угле сгибания;
27 - регулятор выдержки при максимальном угле сгибания;
28 - регулятор скорости изменения угла сгибания;
29 - регулятор начальной установки угла сгибания;
30 - панель управления.
Аппарат для восстановления подвижности суставов человека содержит неподвижное основание 1, раму 2, реверсивный электропривод 3, соединенный с винтовой парой в виде ходового винта 4 и гайки 5, коромысла 6, шарнирно закрепленные на неподвижном основании, и трансмиссию. Трансмиссия выполнена в виде двух параллельно расположенных четырехзвенных механизмов, содержащих первое 7, второе 8, третье 9 и четвертое 10 звенья. Коромысла 6 жестко связаны со вторыми звеньями 8 четырехзвенных механизмов, смежных с первыми звеньями 7, ложемент голени 11 закреплен на раме 2, ложемент бедра 12 закреплен на третьих звеньях 9, смежных с первыми звеньями 7 и связанных через четвертые звенья 10 со вторыми звеньями 8, опора стопы 13 установлена на оси 14, закрепляемой элементами фиксации в пазу рамы. Рама 2 шарнирно связана с кареткой 15, в пазу которой расположена гайка 5 винтовой пары с возможностью ее перемещения по направляющей 16 в радиальном направлении относительно оси ходового винта. Аппарат содержит муфту размыкания 17.
Для обеспечения управления процессом подвижности суставов человека устройство содержит установленные на основании концевые выключатели 18 и установленный на четырехзвенный механизм датчик положения 19, соединенные с микроконтроллером 20, который через узел управления реверсивным электроприводом 21 соединен с реверсивным электроприводом 3.
В аппарате предусмотрен выносной пульт экстренного отключения реверсивного электропривода 22, электрически связанный с микроконтроллером 20.
Для обеспечения управления процессом восстановления подвижности коленного и тазобедренного суставов человека предусмотрена панель управления 30, на которой расположены связанные с микроконтроллером 20 индикатор текущего значения угла сгибания и установленных значений минимального и максимального углов сгибания 23, регулятор минимального угла сгибания 24, регулятор максимального угла сгибания 25, регулятор выдержки при минимальном угле сгибания 26, регулятор выдержки при максимальном угле сгибания 27, регулятор скорости изменения угла сгибания 28 и регулятор начальной установки угла сгибания 29.
В качестве контроллера используется PIC-контроллер типа PIC16F877-20IP фирмы "Microchip". Схема усилителя мощности построена на четырех мощных транзисторных ключах, обеспечивающих реверсивное управление электродвигателем. Использование в усилителе мощности ключевых схем позволяет значительно снизить мощность рассеивания и облегчить тепловой режим выходных транзисторных ключей и, следовательно, повысить КПД и надежность всего устройства. В качестве электродвигателя используется коллекторный двигатель с возбуждением постоянным магнитом типа МЭ241. Для управления частотой вращения электродвигателя используется метод широтно-импульсной модуляции (ШИМ), обеспечивающий экономичную и надежную работу ключевых транзисторных каскадов. ШИМ осуществляется отдельным модулирующим транзистором, управляемым непосредственно PIC-контроллером.
В качестве датчика положения, установленного на четырехзвенный механизм, использован прецизионный потенциометрический датчик с повышенным сроком службы типа ПД-11. Сопротивление датчика положения пропорционально углу сгиба. Для аварийной остановки перемещения подвижной рамы в двух ее крайних положениях устанавливаются два аварийных концевых выключателя, обеспечивающих аварийное отключение электродвигателя. Каждый концевой выключатель зашунтирован диодом, что обеспечивает возможность движения каретки в противоположную сторону при срабатывании концевого выключателя.
Индикатор угла сгибания 23 служит для визуального отображения текущего значения угла сгибания и установленных значений минимального и максимального углов сгибания. Индикатором служит линейная шкала, содержащая 40 управляемых светящихся элементов, что позволяет визуально отображать текущее значение угла сгибания с точностью, не превышающей 3°. Текущее значение угла сгибания отображается одним светящимся элементом, перемещающимся со скоростью, пропорциональной скорости перемещения каретки между двумя «упорами», которые отображаются в виде светящихся зон на обоих краях шкалы.
Регуляторы 24-29 позволяют управлять следующими параметрами движения каретки прибора:
- начальным положением;
- скоростью перемещения (˜0,5...2 см/сек);
- диапазоном перемещения (˜0...110°);
- длительностью остановки (паузы) в крайних положениях (˜0...60 сек).
Аппарат для восстановления подвижности суставов человека работает следующим образом.
Положение ноги пациента фиксируется с помощью ложемента голени 11 на раме 2 устройства и с помощью ложемента бедра 12 на третьем звене 9 четырехзвенных механизмов. С помощью элементов фиксации (на фигурах не показаны) опора для стопы 13, выполненная с возможностью вращения относительно оси 14, закрепляется в пазу рамы 2. Осуществляют регулировку длины вторых звеньев 8 четырехзвенных механизмов перестановкой шарнира, соединяющего второе 8 и четвертое 10 звенья, либо изменением длины коромысла 6, в случае выполнения его телескопическим.
Регуляторами устанавливают граничные значения углов сгибания и разгибания коленного сустава, причем одно из этих значений может совпадать с первоначальным углом, т.е. углом сгиба сустава до его разработки на устройстве. Кроме того, устанавливают начальный угол сгибания, а также длительность выдержки при крайних значениях углов сгибания-разгибания и скорость перемещения каретки.
При включении аппарата вращение вала реверсивного электропривода 3 через редуктор и муфту 17 передается винту 4 винтовой пары. Гайка 5 винтовой пары перемещается вдоль направляющей 16, передавая усилие движения на раму 2. Перемещение рамы вдоль направляющей 16 вызывает движение четырехзвенного механизма и соответственно бедра пациента, закрепленного ложементом 12 к третьим звеньям 9.
В качестве узла, передающего движение ноге пациента, выбрана передача «винт-гайка». Преимущество такой конструкции имеет несколько аспектов. Такая передача является самотормозящейся, что особенно важно для применения при разработке суставов ноги человека. Это означает, что в случае отказа или неисправности какой-либо системы или узла аппарата, ложемент с находящейся на нем конечностью останется в неизменном положении. Таким образом, исключается возможность получения больным болевого шока. Подобная ситуация может возникнуть и при внезапном отключении электрического питания аппарата. Применение передачи «винт-гайка» позволяет исключить возможность поломки механизма привода аппарата больным, оказывающим сопротивление перемещению ноги. В этом случае усилие, развиваемое больным, будет передаваться через каретку на основание, а более чувствительные элементы привода (муфта, редуктор) останутся разгруженными, что предотвратит их поломку. В случае превышения усилия определенного значения муфта 17 размыкается, предотвращая поломку редуктора и электропривода.
Закрепление бедра пациента на третьих звеньях четырехзвенного механизма позволяет обеспечить вращение этого звена вокруг мнимой оси, совпадающей с осью тазобедренного сустава пациента, и, таким образом, обеспечить сочетание естественного движения бедра вокруг своей оси с движением коромысел 6 вокруг оси их закрепления на неподвижном основании устройства.
Информация о текущем значении угла сгиба поступает на вход микроконтроллера в виде напряжения с потенциометрического датчика положения 19. Эта информация сравнивается с заданными параметрами движения, установленными регуляторами 24-29, и используется для выработки сигналов, поступающих на узел управления реверсивным электроприводом, обеспечивая таким образом простое и легкое управление восстановлением подвижности суставов человека.
Выносной пульт экстренного отключения электропривода позволяет пациенту, при необходимости, самому остановить электропривод.
Таким образом, изобретение позволяет создать простое устройство, позволяющее одновременно разрабатывать коленный и тазобедренный суставы и обеспечивающее легкое и надежное управление процессом восстановления работоспособности суставов человека.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| УЛЬТРАЗВУКОВОЙ ПРИБОР ДЛЯ ДИАГНОСТИКИ ПОРАЖЕНИЙ СЛУХА | 2006 |
|
RU2307587C1 |
| Устройство для разработки подвижности суставов нижней конечности | 1989 |
|
SU1655497A1 |
| МНОГОКАНАЛЬНЫЙ РАДИОТЕРМОГРАФ | 2006 |
|
RU2310876C1 |
| УСТРОЙСТВО ДЛЯ ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ЦВЕТНОГО ИЗОБРАЖЕНИЯ ВНУТРЕННЕЙ СТРУКТУРЫ ГЛАЗА | 2007 |
|
RU2336013C1 |
| УСТРОЙСТВО ДЛЯ АБРАЗИВНО-ЭКСТРУЗИОННОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 2010 |
|
RU2423218C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
Изобретение относится к медицине. Изобретение обеспечивает увеличение подвижности при разработке коленного и тазобедренного суставов человека в процессе лечения и реабилитации. Аппарат содержит неподвижное основание, раму, реверсивный электропривод, соединенный с винтовой парой в виде ходового винта и гайки, коромысла, шарнирно закрепленные на основании, трансмиссию, два ложемента и опору для стопы. Аппарат также содержит микроконтроллер, датчик положения, концевые выключатели и узел управления реверсивным электроприводом. Трансмиссия выполнена в виде двух связанных параллельно расположенных четырехзвенных механизмов. Коромысла жестко связаны со вторыми звеньями четырехзвенных механизмов, смежных с первыми звеньями. Ложемент голени закреплен на раме. Ложемент бедра закреплен на третьих звеньях, смежных с первыми звеньями и связанных через четвертые звенья со вторыми звеньями. Рама шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения в радиальном направлении относительно оси ходового винта. На основании установлены концевые выключатели, фиксирующие крайние положения каретки, на четырехзвенный механизм установлен датчик положения, микроконтроллер связан с узлом управления реверсивным электроприводом, выход которого соединен с реверсивным электроприводом, а концевые выключатели связаны с микроконтроллером. Изобретение позволяет создать простое устройство, позволяющее одновременно разрабатывать коленный и тазобедренный суставы и обеспечивающее легкое и надежное управление процессом восстановления работоспособности суставов человека. 2 з.п. ф-лы, 1 ил.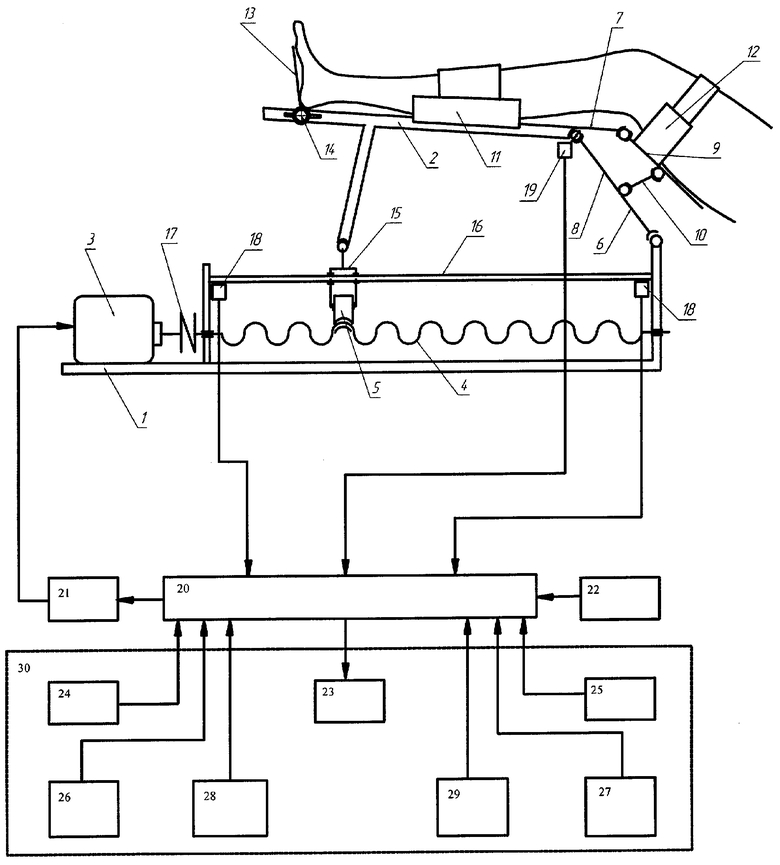
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
| Устройство для разработки суставов нижней конечности | 1985 |
|
SU1255125A1 |
| RU 2000766 C1, 15.10.1993 | |||
| US 4825852 A, 02.05.1989 | |||
| Акселерометр | 1975 |
|
SU535513A1 |
| JP 6105877 A, 19.04.1994 | |||
| ВОЛКОВ М.В., ОГАНЕСЯН О.В | |||
| Восстановление формы и функции суставов и конечностей | |||
| - М.: Медицина, 1986, с.8-11. | |||

