Изобретение относится к аппаратам для принудительной разработки коленного и тазобедренного суставов человека с целью восстановления их подвижности в процессе лечения и реабилитации.
Переломы, болезни и травмы опорно-двигательного аппарата человека, в частности ног, требуют значительных затрат времени и средств на восстановление работоспособности суставов. Достичь этого удается лишь долговременными тренировками на оборудовании для создания дозированной знакопеременной нагрузки на коленный и бедренный суставы.
Известно устройство для разработки движений нижней конечности (см. RU 2102056, кл. А 61 Н 1/02, 20.01.1998), содержащее нагрузочный элемент, соединенный через многосекционный пантограф с подстопником, и корпус с продольной прорезью в крышке, в котором элементы перекрестий штанг пантографа размещены на стойках, установленных с возможностью продольного перемещения путем скольжения по днищу корпуса нижними торцами, имеющими сферическую форму.
Известно устройство для разработки нижних конечностей (см. RU 2085173, кл. А 61 Н 1/02, 27.07.1997), содержащее П-образную регулируемой длины тягу, шарнирно соединенную с подстопником, оснащенным элементами крепления установленным на роликах, причем на подстопнике жестко установлен ложемент для голени, оснащенный элементами крепления и упорами, выполненными с возможностью вхождения в механический контакт с П-образной тягой при ее повороте относительно ложемента голени, на П-образной тяге закреплен с возможностью продольного перемещения в двух взаимно перпендикулярных направлениях и фиксации упор в виде перекладины, а ролики своими поверхностями качения установлены на направляющих.
Основным недостатком этих устройств является узкая область применения, связанная с отсутствием современных механических и/или электрических приводов для активного перемещения нижней конечности.
Наиболее близким к данному техническому решению является устройство для восстановления работоспособности суставов человека (см. RU 2139701, кл. А 61 Н 1/02, 20.10.1999), содержащее неподвижное основание, раму, реверсивный электропривод, соединенный с винтовой парой в виде ходового винта и гайки, коромысла, шарнирно закрепленные на основании, трансмиссию, два ложемента и опору для стопы.
Недостатками указанного устройства являются сложность и узкая область применения: либо в варианте для разработки коленного сустава, либо - голеностопного сустава.
Однако при ряде заболеваний, например при деформирующем артрозе, состоянии после эндопротезирования коленных суставов, пластики передней крестообразной связки необходимо одновременно разрабатывать коленный и тазобедренный суставы.
Технический результат, на достижение которого направлено изобретение, заключается в создании устройства, простого, надежного и позволяющего одновременно разрабатывать коленный и тазобедренный суставы.
Указанный технический результат достигается тем, что в устройстве для восстановления работоспособности суставов человека, содержащем неподвижное основание, раму, реверсивный электропривод, соединенный с винтовой парой в виде ходового винта и гайки, коромысла, шарнирно закрепленные на неподвижном основании, трансмиссию, два ложемента и опору для стопы, трансмиссия выполнена в виде двух связанных параллельно расположенных четырехзвенных механизмов, причем коромысла жестко связаны со вторыми звеньями четырехзвенных механизмов, смежных с первыми звеньями, ложемент голени закреплен на раме, ложемент бедра закреплен на третьих звеньях, смежных с первыми звеньями и связанных через четвертые звенья со вторыми звеньями, опора стопы установлена на оси, закрепляемой элементами фиксации в пазу рамы, которая шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары с возможностью ее перемещения в радиальном направлении относительно оси ходового винта.
Указанный технический результат достигается также тем, что на коромысле выполнены пазы для регулирования длины вторых звеньев четырехзвенных механизмов в зависимости от длины бедра пациента.
Указанный технический результат достигается тем, что коромысло выполнено телескопическим.
Указанный технический результат достигается тем, что электропривод соединен с винтовой парой через размыкающую муфту.
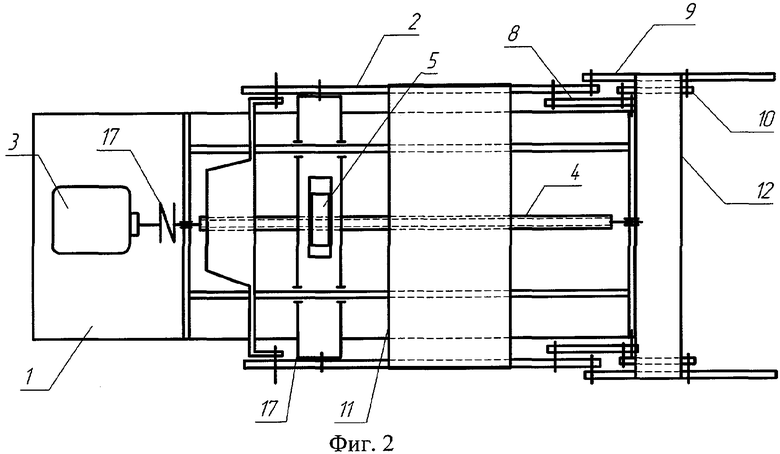
На фигуре 1 изображена кинематическая схема устройства.
На фигуре 2 - то же, вид сверху.
На фигурах приняты следующие обозначения:
1 - неподвижное основание;
2 - рама;
3 - реверсивный электропривод;
4 - ходовой винт;
5 - гайка;
6 - коромысло;
7 - первое звено;
8 - второе звено;
9 - третье звено;
10 - четвертое звено;
11 - ложемент голени;
12 - ложемент бедра;
13 - опора стопы;
14 - ось опоры стопы;
15 - каретка;
16 - направляющая;
17 - муфта.
Устройство для восстановления работоспособности суставов человека содержит неподвижное основание 1, раму 2, реверсивный электропривод 3, соединенный с винтовой парой в виде ходового винта 4 и гайки 5, коромысла 6, шарнирно закрепленные на неподвижном основании, и трансмиссию. Трансмиссия выполнена в виде двух связанных параллельно расположенных четырехзвенных механизмов, содержащих первое 7, второе 8, третье 9 и четвертое 10 звено. Коромысла 6 жестко связаны со вторыми звеньями 8 четырехзвенных механизмов, смежных с первыми звеньями 7, ложемент голени 11 закреплен на раме 2, ложемент бедра 12 закреплен на третьих звеньях 9, смежных с первыми звеньями 7 и связанных через четвертые звенья 10 со вторыми звеньями 8, опора стопы 13 установлена на оси 14, закрепляемой элементами фиксации в пазу рамы. Рама 2 шарнирно связана с кареткой 15, в пазу которой расположена гайка 5 винтовой пары с возможностью ее перемещения в радиальном направлении относительно оси ходового винта.
Устройство работает следующим образом.
Положение ноги пациента фиксируется с помощью ложемента голени 11 на раме 2 устройства и с помощью ложемента бедра 12 на третьем звене 9 четырехзвенных механизмов. С помощью элементов фиксации (на фигурах не показаны) опора для стопы 13, выполненная с возможностью вращения относительно оси 14, закрепляется в пазу рамы 2. Осуществляют регулировку длины вторых звеньев 8 четырехзвенных механизмов перестановкой шарнира, соединяющего второй 8 и четвертый шарниры 10, либо изменением длины коромысла 6, в случае выполнения его телескопическим.
На блоке управления (на фигурах не показан) устанавливаются граничные значения углов сгибания и разгибания коленного сустава, причем одно из этих значений может совпадать с первоначальным углом, т.е. углом сгиба сустава до его разработки на устройстве. На блоке управления устанавливаются скорость сгибания-разгибания. При включении устройства вращение вала реверсивного электропривода 3 через редуктор и муфту 17 передается винту 4 винтовой пары. Гайка 5 винтовой пары перемещается вдоль направляющей 16, передавая усилие движения на раму 2. Перемещение рамы вдоль направляющей 16 вызывает движение четырехзвенного механизма и соответственно бедра пациента, закрепленного ложементом 12 к третьим звеньям 9.
В качестве узла, передающего движение ноге пациента, выбрана передача "винт-гайка". Преимущество такой конструкции имеет несколько аспектов. Такая передача является самотормозящейся, что особенно важно для применения при разработке суставов ноги человека. Это означает, что в случае отказа или неисправности какой-либо системы или узла аппарата, ложемент с находящейся на нем конечностью останется в неизменном положении. Таким образом, исключается возможность получения больным болевого шока. Подобная ситуация может возникнуть и при внезапном отключении электрического питания аппарата. Применение передачи "винт-гайка" позволяет исключить возможность поломки механизма привода аппарата больным, оказывающим сопротивление перемещению ноги. В этом случае усилие, развиваемое больным, будет передаваться через каретку на основание, а более чувствительные элементы привода (муфта, редуктор) останутся разгруженными, что предотвратит их поломку. В случае превышения усилия определенного значения муфта 17 размыкается, предотвращая поломку редуктора и электропривода.
Закрепление бедра пациента на третьих звеньях четырехзвенного механизма позволяет обеспечить вращение этого звена вокруг мнимой оси, совпадающей с осью тазобедренного сустава пациента и, таким образом, обеспечить сочетание естественного движения бедра вокруг своей оси с движением коромысел 6 вокруг оси их закрепления на неподвижном основании устройства. Указанное техническое решение позволяет упростить конструкцию устройства и уменьшить его массу и габариты.
В настоящее время разработан опытный образец устройства, имеющий следующие технические характеристики:
потребляемая мощность 50 Вт;
длительность цикла сгибания-разгибания от 1 до 4 мин;
минимальный угол сгиба коленного сустава 0°, максимальный 115° (обеспечиваются ограничителями, на фигурах не показаны);
минимальный угол сгиба тазобедренного сустава 15°, максимальный 72° (обеспечиваются ограничителями, на фигурах не показаны);
длительность остановки рамы при достижении ей установленных
крайних точек - в диапазоне 0-60 сек.
Устройство оснащено выносным пультом управления, на котором предусмотрены кнопки экстренного останова.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией | 2016 |
|
RU2641065C2 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| Устройство для разработки подвижности суставов нижней конечности | 1989 |
|
SU1655497A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ МЫШЦ ГОЛЕНИ И СТОПЫ | 1991 |
|
RU2014053C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
Изобретение относится к аппаратам для принудительной разработки коленного и тазобедренного суставов человека с целью восстановления их подвижности в процессе лечения и реабилитации. Устройство для восстановления работоспособности суставов человека состоит из рамы, реверсивного электропривода, соединенного с винтовой парой в виде ходового винта и гайки, трансмиссии, двух ложементов и опоры для стопы. Устройство также содержит неподвижное основание и коромысла, шарнирно закрепленные на основании. Трансмиссия выполнена в виде двух связанных параллельно расположенных четырехзвенных механизмов. Коромысла жестко связаны со вторыми звеньями четырехзвенных механизмов, смежных с первыми звеньями. Ложемент голени закреплен на раме. Ложемент бедра закреплен на третьих звеньях, смежных с первыми звеньями и связанных через четвертые звенья со вторыми звеньями. Опора стопы установлена на оси, закрепляемой элементами фиксации в пазу рамы, которая шарнирно связана с кареткой, в пазу которой расположена гайка винтовой пары. Технический результат - простота, надежность, возможность одновременно разрабатывать коленный и тазобедренный суставы. 3 з.п. ф-лы, 2 ил.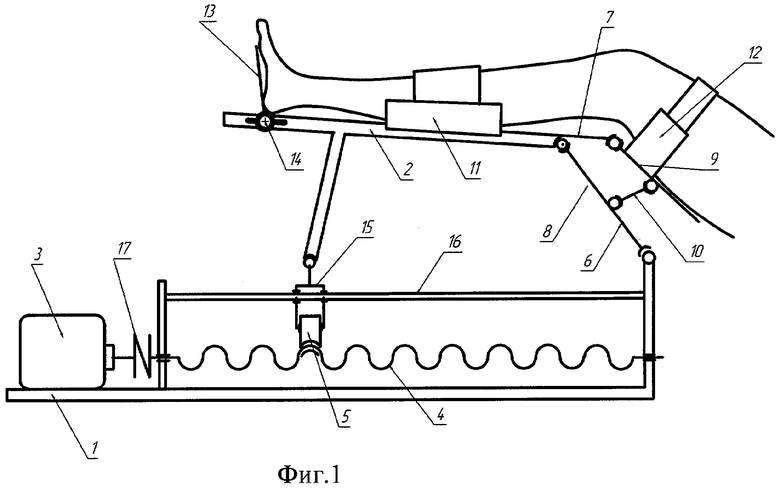
| Устройство для разработки подвижности в суставах нижних конечностей | 1977 |
|
SU640740A1 |
| Электромеханическое устройство дляРАзРАбОТКи СуСТАВОВ НижНиХ КОНЕчНОСТЕй | 1979 |
|
SU848027A1 |
| Устройство для разработки суставов нижних конечностей | 1989 |
|
SU1671297A1 |
| Устройство для разработки тазобедренного и коленного суставов | 1980 |
|
SU950379A1 |
| СПОСОБ, А ТАКЖЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ПЕЧАТИ НА ЕМКОСТЯХ | 2007 |
|
RU2392205C1 |
| US 6685605 B1, 03.02.2004. | |||

