УРОВЕНЬ ТЕХНИКИ
Изобретение относится к узлу захватного устройства и способу для захвата компонента шины, в частности, компонента шины для формирования слоя каркаса или защитного слоя.
Известны захватные устройства для захвата компонентов шины различных размеров и форм, и с разными технологиями захвата, чтобы оптимальным образом захватывать компоненты шины различных размеров и форм. В частности, длина последовательно обрабатываемых компонентов шины может существенно меняться, например, при формировании двух защитных слоев из чередующихся более коротких и более длинных компонентов шины. Известные захватные устройства должны заменяться для каждого компонента шины, который имеет либо другой размер, либо другую форму по сравнению с ранее обрабатываемым компонентом шины. В частности, для захватных устройств, работающих с помощью присасывания, важно обеспечить выбор правильного захватного устройства для каждого компонента шины, чтобы поверхность выбранного захватного устройства в существенной степени соответствовала компоненту шины, в противном случае, утечка воздуха предотвратит формирование достаточного сниженного давления для удерживания компонента шины. Замена захватных устройств отнимает много времени.
Цель настоящего изобретения состоит в том, чтобы создать узел захватного устройства и способ для захвата компонента шины, в котором гибкость захватного устройства может быть улучшена.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно первому аспекту изобретения создан узел захватного устройства для захвата компонента шины, в частности, компонента шины для формирования слоя каркаса или защитного слоя, в котором узел захватного устройства обеспечен захватным устройством, содержащим захватный элемент с захватной поверхностью, которая скомпонована, чтобы захватывать и удерживать компонент шины с помощью присасывания, при этом захватная поверхность содержит множество секций, при этом захватное устройство для каждой секции содержит вакуумный канал, который входит в соответствующую секцию в захватной поверхности для удерживания компонента шины на соответствующей секции, и клапан, который расположен между вакуумным каналом соответствующей секции и источником вакуума, при этом каждый клапан может быть по отдельности переведен в открытое положение, в котором клапан скомпонован, чтобы соединять вакуумный канал соответствующей секции в сообщение по текучей среде с источником вакуума, и закрытое положение, в котором клапан скомпонован, чтобы отсоединять вакуумный канал соответствующей секции от источника вакуума, при этом, при использовании, захватная поверхность содержит область присасывания, сформированную из секций, соответствующие клапаны которых находятся в открытом положении, при этом область присасывания может быть настроена посредством выборочного перевода множества клапанов в открытые положения и закрытые положения, при этом узел захватного устройства дополнительно содержит конфигурационный инструмент, при этом захватное устройство и конфигурационный инструмент выполнены с возможностью расположения относительно друг друга в конфигурационном положении для управления клапанами, при этом захватное устройство для каждого клапана обеспечено операционным элементом, который функционально соединен с соответствующим клапаном, чтобы переводить соответствующий клапан в открытое положение и закрытое положение, при этом конфигурационный инструмент обеспечен множеством конфигурационных элементов, которые, в конфигурационном положении, скомпонованы, чтобы взаимодействовать с операционными элементами, чтобы переводить соответствующие клапаны в их открытые положения и их закрытые положения.
Таким образом, область присасывания захватного устройства может быть настроена, в пределах границ захватной поверхности, чтобы совпадать или по существу совпадать с формой и/или размером компонента шины, без необходимости заменять захватное устройство на другое захватное устройство. Это может существенно улучшить гибкость захватного устройства. Конфигурационный инструмент может быстро конфигурировать захватное устройство без вмешательства человека. Конфигурационный инструмент может дополнительно предотвращать необходимость входа людей-операторов в потенциально опасную область узла захватного устройства, чтобы вручную управлять клапанами.
В варианте осуществления, каждый операционный элемент выполнен с возможностью перемещения в направлении прижимания и направлении вытягивания, противоположном направлению прижимания, чтобы переводить соответствующий клапан в открытое и закрытое положение, при этом конфигурационные элементы скомпонованы, чтобы прижимать и вытягивать операционные элементы, чтобы переводить соответствующие клапаны в их открытые положения и их закрытые положения. Прижимание и вытягивание являются сравнительно простыми операциями, которые можно легко выполнить посредством простых инструментов, таких как конфигурационный инструмент.
В варианте осуществления, каждый операционный элемент содержит стержень, который функционально соединен с клапаном в направлении прижимания, и ручку, которая жестко закреплена на стержне в направлении вытягивания, при этом конфигурационные элементы являются пальцами, которые скомпонованы, чтобы зацепляться с, взаимодействовать с или захватывать ручки операционных элементов для перемещения упомянутых операционных элементов в направлении прижимания или направлении вытягивания. Пальцы можно легко обслуживать, так как они не содержат подвижных деталей. Более того, пальцы могут быть вставлены в тугие пространства, например, в зацепляющее соединение между стержнями смежных операционных элементов.
В варианте осуществления, операционные элементы разнесены в направлении индексирования или параллельно ему с постоянным интервалом, при этом конфигурационные элементы разнесены с таким же постоянным интервалом. Таким образом, конфигурационные элементы могут зацепляться с операционными элементами на любом элементе вдоль направления индексирования.
В варианте осуществления, одно из захватного устройства и конфигурационного инструмента выполнено с возможностью расположения относительно другого из захватного устройства и конфигурационного инструмента в различных положениях индексирования вдоль направления индексирования, при этом положения индексирования разнесены с таким же постоянным интервалом, как операционные элементы и конфигурационные элементы, при этом конфигурационные элементы скомпонованы, чтобы зацепляться с, взаимодействовать с или захватывать разное количество операционных элементов для каждого положения индексирования вдоль направления индексирования. Таким образом, посредством расположения захватного устройства и конфигурационного инструмента в выбранном положении индексирования, могут быть захвачены разные количества операционных элементов, позволяя управлять только частью из множества клапанов, и, таким образом, позволяя секциям только в части приводимой в действие области быть соединенными с источником вакуума, чтобы формировать область присасывания, или быть отсоединенными от источника вакуума, чтобы не формировать область присасывания.
В варианте осуществления, конфигурационные элементы, при зацеплении с, взаимодействии с или захвате двух или более из операционных элементов, скомпонованы для зацепления с, взаимодействия с или захвата закрытой группы из двух или более смежных операционных элементов в направлении индексирования или параллельно ему. Таким образом, закрытая группа из двух или более секций может быть либо соединена с источником вакуума, либо отсоединена от него.
В варианте осуществления, узел захватного устройства дополнительно содержит манипулятор, предпочтительно в форме робота, который соединен с захватным устройством для установки положения захватного устройства относительно компонента шины. Манипулятор может управлять относительным положением захватного устройства относительно компонента шины и/или конфигурационного инструмента.
В варианте осуществления, захватное устройство содержит блок клапанов, который установлен на захватный элемент и который содержит клапаны в сообщение по текучей среде с вакуумными каналами, при этом узел захватного устройства содержит по меньшей мере один альтернативный захватный элемент для захвата и удерживания альтернативного компонента шины другого размера и/или формы с помощью присасывания, при этом блок клапанов выполнен с возможностью отсоединения от захватного элемента и с возможностью установки на по меньшей мере один альтернативный захватный элемент. Таким образом, сами захватные элементы могут быть сконструированы, чтобы быть менее сложными, чтобы требовать меньше обслуживания и/или чтобы иметь более низкую стоимость. Сложная, требующая много обслуживания и/или дорогая часть захватных элементов может быть прикреплена к любому из захватных элементов.
В варианте осуществления, захватное устройство обеспечено соединительным элементом, который неподвижно закреплен на блоке клапанов, при этом манипулятор скомпонован, чтобы захватывать захватное устройство на соединительном элементе. Сложная, требующая много обслуживания и/или дорогая часть захватных элементов может удерживаться на манипуляторе для использования в комбинации с другим из захватных элементов.
В варианте осуществления, конфигурационный инструмент скомпонован, чтобы быть неподвижным, при этом манипулятор скомпонован для перемещения захватного устройства в область вблизи неподвижного конфигурационного инструмента, с тем чтобы конфигурационный инструмент находился в конфигурационном положении относительно захватного устройства, при этом манипулятор дополнительно скомпонован для перемещения захватного устройства относительно неподвижного конфигурационного инструмента, с тем чтобы конфигурационные элементы взаимодействовали с операционными элементами, чтобы переводить соответствующие клапаны в их открытые положения и их закрытые положения. Сохраняя конфигурационный инструмент неподвижным, сложность конфигурационного инструмента может быть дополнительно снижена. Манипулятор может просто перемещать захватное устройство в конфигурационное положение и из него.
В варианте осуществления, узел захватного устройства дополнительно содержит блокирующий инструмент, который выполнен с возможностью перемещения относительно операционных элементов между свободным положением и блокирующим положением для позволения или блокировки, соответственно, перемещения операционных элементов в направлении прижимания и направлении вытягивания. Блокирующий инструмент может надежно закреплять операционные элементы против перемещения в направлении прижимания и направлении вытягивания перед тем, как происходит конфигурация, и после этого, чтобы гарантировать, что конфигурация случайно не изменится во время захвата компонента шины.
В варианте осуществления, операционные элементы выполнены с возможностью перемещения в направлении прижимания и направлении вытягивания между прижатым вниз положением и вытянутым вверх положением, соответственно, которые разделены промежуточным пространством, при этом блокирующий инструмент содержит множество блокирующих элементов, которые, в блокирующем положении, проходят в промежуточное пространство между соответствующими прижатыми вниз положениями и соответствующими вытянутыми положениями, чтобы блокировать перемещение в направлении вытягивания любого из операционных элементов, которые находятся в прижатом вниз положении, и чтобы блокировать перемещение в направлении прижимания любого из операционных элементов, которые находятся в вытянутом вверх положении. Таким образом, блокирующий инструмент может одновременно блокировать операционные элементы независимо от того, расположены ли они в прижатом вниз положении или вытянутом вверх положении.
В варианте осуществления, конфигурационный инструмент обеспечен сдвигающим элементом, который скомпонован, чтобы сдвигать блокирующий инструмент из блокирующего положения в свободное положение, когда конфигурационный инструмент находится в конфигурационном положении относительно захватного устройства. Сдвигающий элемент может автоматически перемещать блокирующий инструмент в свободное положение, с тем чтобы, в конфигурационном положении, операционные элементы могли автоматически свободно перемещаться в направлении прижимания и направлении вытягивания.
В варианте осуществления, блокирующий инструмент обеспечен примыкающим элементом, при этом сдвигающий элемент скомпонован, чтобы примыкать к блокирующему инструменту на примыкающем элементе, чтобы сдвигать блокирующий инструмент с помощью примыкания. Примыкающий элемент может быть скомпонован, чтобы примыкать к конфигурационному инструменту в положении, которое не мешает работе конфигурационного элемента, операционных элементов и/или блокирующего инструмента.
В варианте осуществления, захватное устройство обеспечено смещающим элементом для смещения блокирующего инструмента в блокирующее положение, при этом сдвигающий элемент скомпонован для сдвигания блокирующего инструмента против смещения в свободное положение. Таким образом, блокирующий инструмент будет автоматически возвращаться в блокирующее положение, когда примыкание между блокирующим инструментом и конфигурационным инструментом в конфигурационном положении завершается.
В варианте осуществления, блокирующий инструмент обеспечен на захватном устройстве и выполнен с возможностью перемещения относительно операционных элементов между свободным положением и блокирующим положением. Таким образом, блокирующий инструмент может быть перемещен вместе с захватным элементом, чтобы гарантировать, что конфигурация останется неподвижной во время захвата компонента шины.
В варианте осуществления, узел захватного устройства дополнительно содержит датчик зазора для детектирования возвращения блокирующего инструмента из свободного положения в блокирующее положение. Если блокирующий инструмент не возвращается в блокирующее положение, это может указывать на то, что один из операционных элементов не полностью перемещен в свое вытянутое вверх положение или прижатое вниз положение. Подходящее действие может быть выполнено, чтобы исправить этот неправильно расположенный операционный элемент перед операцией захвата.
В варианте осуществления, одна из секций обеспечена датчиком давления для детектирования давления в упомянутой секции. Давление в упомянутой одной секции будет падать до частичного вакуума в присутствии компонента шины. Это падение давления может быть обнаружено посредством датчика давления и использовано в качестве индикатора присутствия компонента шины на захватной поверхности.
В варианте осуществления, секции формируют приводимую в действие область захватной поверхности, при этом область присасывания может быть настроена на полный режим, в котором область присасывания проходит по всей приводимой в действие области, и частичный режим, в котором область присасывания проходит только по части приводимой в действие области. Настройка области присасывания только на часть приводимой в действие области согласно области поверхности компонента шины, который должен быть захвачен, может предотвратить утечку воздуха в секциях, которые не покрыты компонентом шины во время захвата.
В варианте осуществления, каждая секция напрямую смежна с другой из секций, с тем чтобы обеспечивать возможность формирования области присасывания из одиночной цепи смежных секций. Таким образом, компонент шины может быть неподвижно, надежно и/или однородно удерживаться на захватной поверхности.
В варианте осуществления, область присасывания выполнена с возможностью регулировки, чтобы совпадать или по существу совпадать с областью поверхности компонента шины, который должен быть захвачен. Таким образом, компонент шины может оптимальным образом зацепляться и удерживаться на захватной поверхности.
В варианте осуществления, компонент шины имеет контур в форме параллелограмма или ромбоида с двумя парами параллельных сторон, при этом захватная поверхность имеет контур в форме параллелограмма или ромбоида с двумя парами параллельных сторон для удерживания компонента шины на захватной поверхности, с каждой парой параллельных сторон компонента шины, проходящей параллельно или по существу параллельно одной из пар параллельных сторон захватной поверхности. Таким образом, захватная поверхность может быть оптимизирована для захвата и удерживания компонента шины с конкретной формой параллелограмма или ромбоида. Несмотря на то, что контур фиксирован, область присасывания все еще может быть настроена в пределах упомянутого контура, вновь улучшая гибкость захватного устройства.
В варианте осуществления, секции проходят в первом направлении, параллельном одной из пар параллельных сторон захватной поверхности. Таким образом, секции могут неподвижно, надежно и/или однородно удерживать компонент шины на захватной поверхности в первом направлении захватной поверхности.
В варианте осуществления, секции смежны друг с другом во втором направлении, параллельном другой из пар параллельных сторон захватной поверхности. Таким образом, область присасывания может быть настроена посредством изменения количества приведенных в действие смежных секций во втором направлении согласно размеру компонента шины в упомянутом втором направлении.
В варианте осуществления, секции покрывают всю или по существу всю захватную поверхность в первом направлении.
В варианте осуществления, секции покрывают всю или по существу всю захватную поверхность во втором направлении. Таким образом, секции могут неподвижно, надежно и/или однородно удерживать компонент шины на захватной поверхности по всей захватной поверхности в первом направлении.
Согласно второму аспекту, изобретение предлагает способ для захвата компонента шины, в частности, компонента шины для формирования слоя каркаса или защитного слоя, с помощью вышеупомянутого захватного устройства, в котором способ содержит этап регулировки области присасывания посредством выборочного перевода множества клапанов в открытые положения и закрытые положения.
Таким образом, область присасывания захватного устройства может быть настроена, в пределах границ захватной поверхности, чтобы совпадать или по существу совпадать с формой и/или размером компонента шины, без необходимости заменять захватное устройство на другое захватное устройство. Это может существенно улучшить гибкость захватного устройства.
В варианте осуществления, секции формируют приводимую в действие область захватной поверхности, при этом способ содержит этап регулировки области присасывания на полный режим, в котором область присасывания проходит по всей приводимой в действие области, и частичный режим, в котором область присасывания проходит только по части приводимой в действие области. Настройка области присасывания только на часть приводимой в действие области согласно области поверхности компонента шины, который должен быть захвачен, может предотвратить утечку воздуха в секциях, которые не покрыты компонентом шины во время захвата.
В варианте осуществления, область присасывания сформирована одиночной цепью смежных секций. Таким образом, компонент шины может быть неподвижно, надежно и/или однородно удерживаться на захватной поверхности.
В варианте осуществления, область присасывания настраивается, чтобы совпадать или по существу совпадать с областью поверхности компонента шины, который должен быть захвачен. Таким образом, компонент шины может оптимальным образом зацепляться и удерживаться на захватной поверхности.
В варианте осуществления этап регулировки области присасывания на конкретную конфигурацию содержит этапы конфигурирования, состоящие в одновременном переводе всех клапанов в открытое положение или закрытое положение и по существу одновременном переводе выборочного набора клапанов в открытое положение или закрытое положение согласно конкретной конфигурации области присасывания. Таким образом, все положения клапанов повторно установлены и/или известны оператору, и конфигурационный элемент может быть использован, чтобы устанавливать только группу клапанов в другое положение.
В варианте осуществления, клапан для по меньшей мере одной из секций поддерживается открытым, чтобы детектировать присутствие или частичное присутствие компонента шины в упомянутой одной секции с помощью измерения давления в упомянутой одной секции. Давление в упомянутой одной секции будет падать до частичного вакуума в присутствии компонента шины. Упомянутое падение давления может быть обнаружено, как обозначение присутствия компонента шины на захватной поверхности.
В варианте осуществления, захватное устройство содержит блок клапанов, который установлен на захватный элемент и который содержит клапаны в сообщение по текучей среде с вакуумными каналами, при этом узел захватного устройства содержит по меньшей мере один альтернативный захватный элемент для захвата и удерживания альтернативного компонента шины другого размера и/или формы с помощью присасывания, при этом способ содержит этап отсоединения блока клапанов от захватного элемента и установки блока клапанов на по меньшей мере один альтернативный захватный элемент. Таким образом, сами захватные элементы могут быть сконструированы, чтобы быть менее сложными, чтобы требовать меньше обслуживания и/или чтобы иметь более низкую стоимость. Сложная, требующая много обслуживания и/или дорогая часть захватных элементов может быть прикреплена к любому из захватных элементов.
Разные аспекты и признаки, описанные и показанные в данной спецификации, могут применяться по отдельности, если это возможно. Эти отдельные аспекты, в частности, аспекты и признаки, описанные в прилагаемых зависимых пунктах формулы изобретения, могут стать предметом выделенных патентных заявок.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет описано на основании примерного варианта осуществления, показанного на прилагаемых схематических чертежах, на которых:
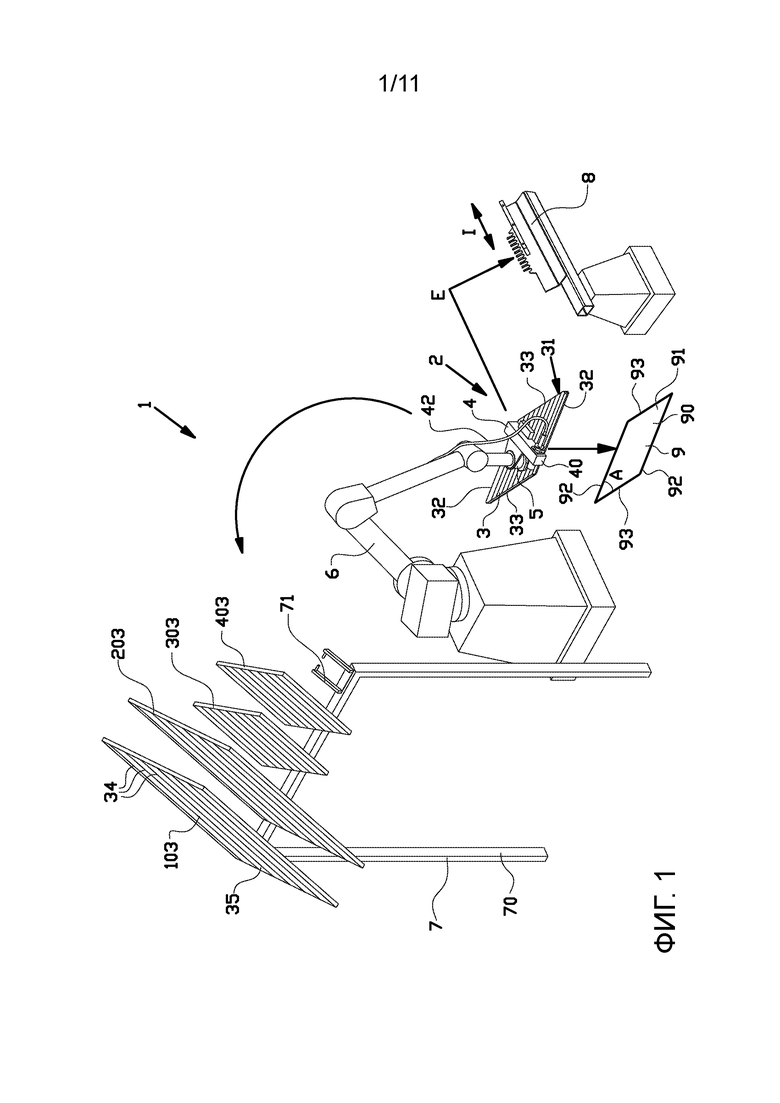
фиг. 1 - изометрическое изображение узла захватного устройства согласно изобретению, содержащего захватное устройство и конфигурационный инструмент для конфигурирования упомянутого захватного устройства;
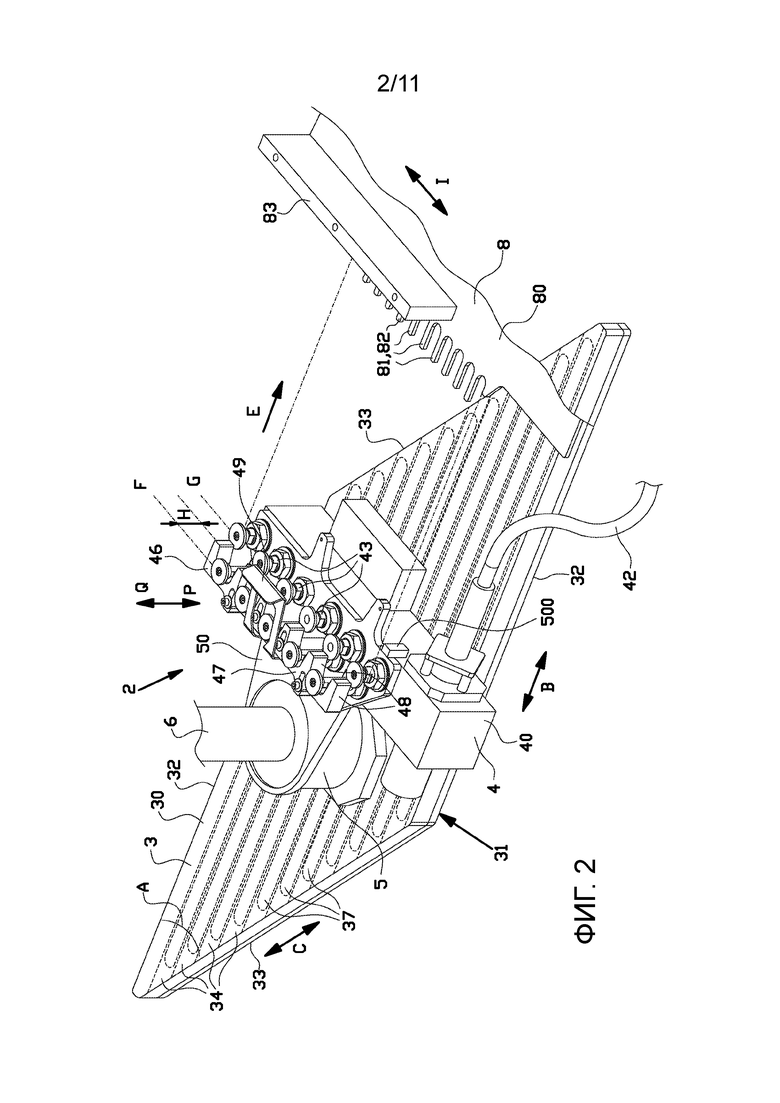
фиг. 2 - изометрическое изображение захватного устройства и конфигурационного инструмента с фиг. 1;
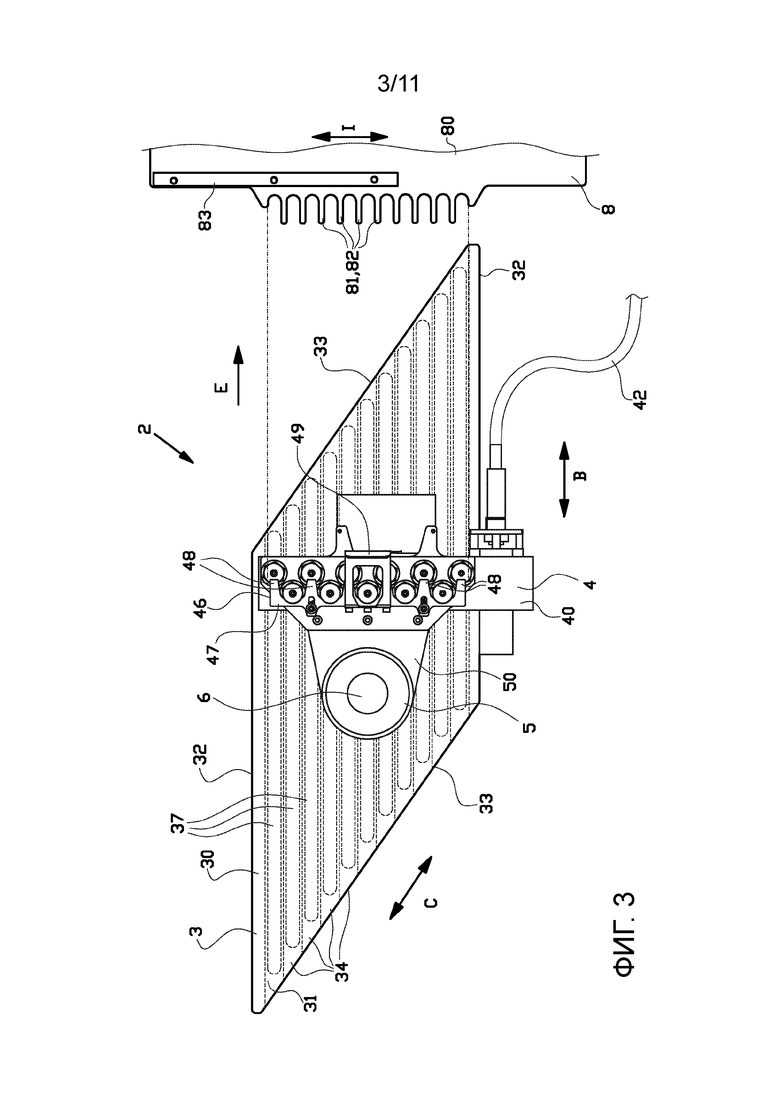
фиг. 3 - вид сверху захватного устройства и конфигурационного инструмента с фиг. 2;
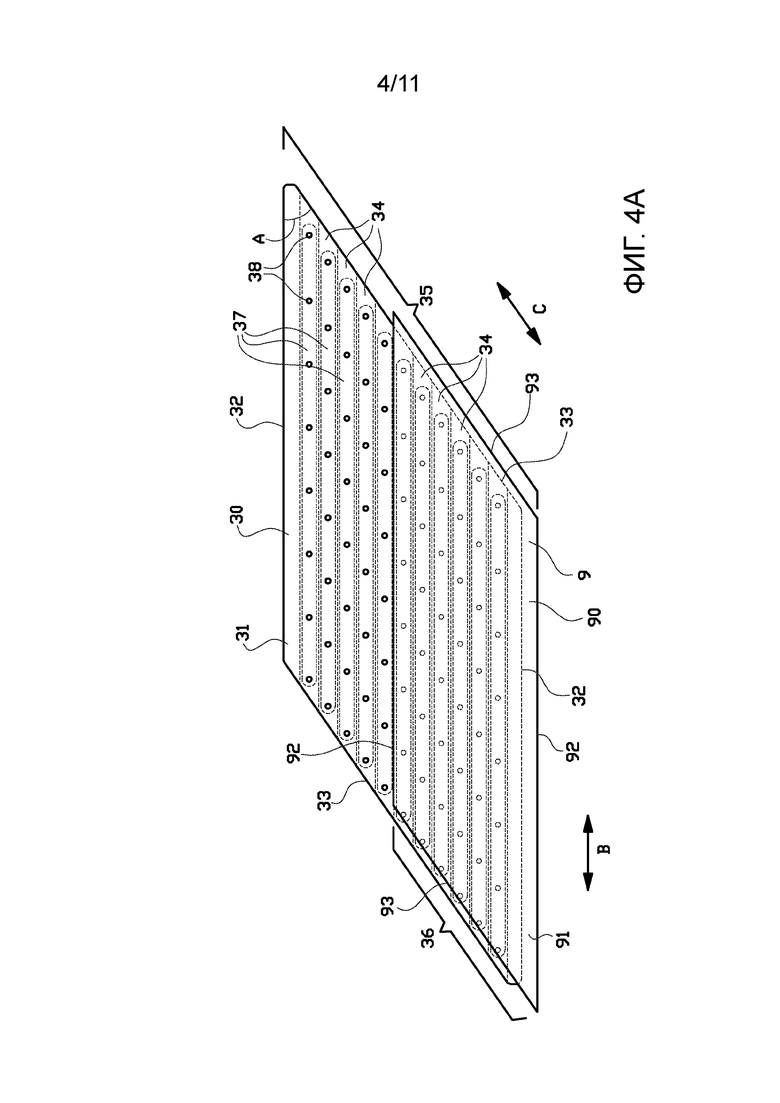
фиг. 4A и 4B - вид снизу захватного устройства с фиг. 2;
фиг. 5 - вид спереди захватного устройства с фиг. 2;
фиг. 6 - изометрическое изображение конфигурационного инструмента с фиг. 1;
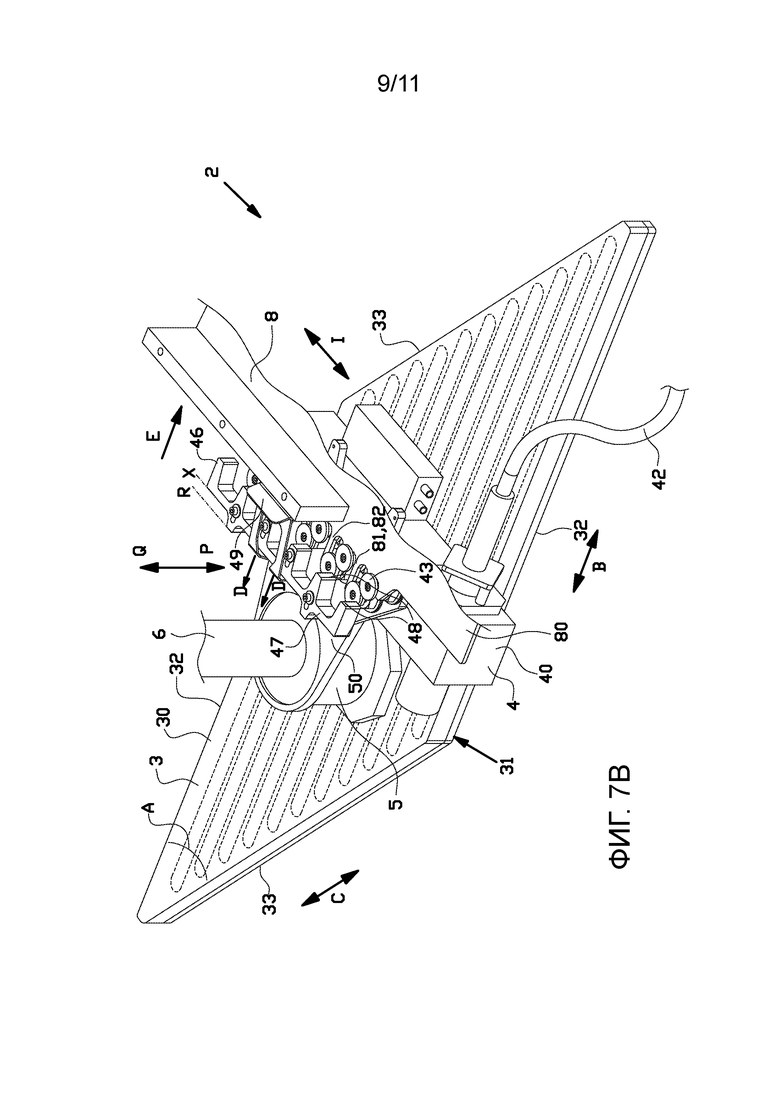
фиг. 7A и 7B - изометрические изображения этапов взаимодействия захватного устройства с конфигурационным инструментом в одной конфигурации; и
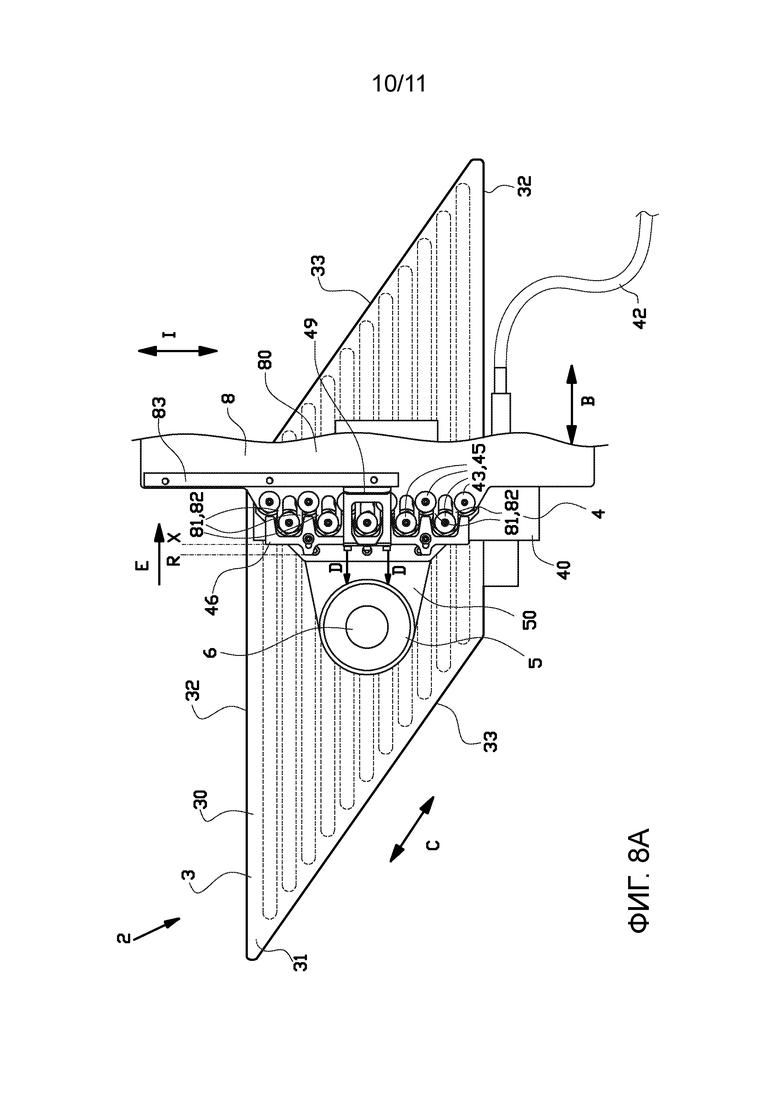
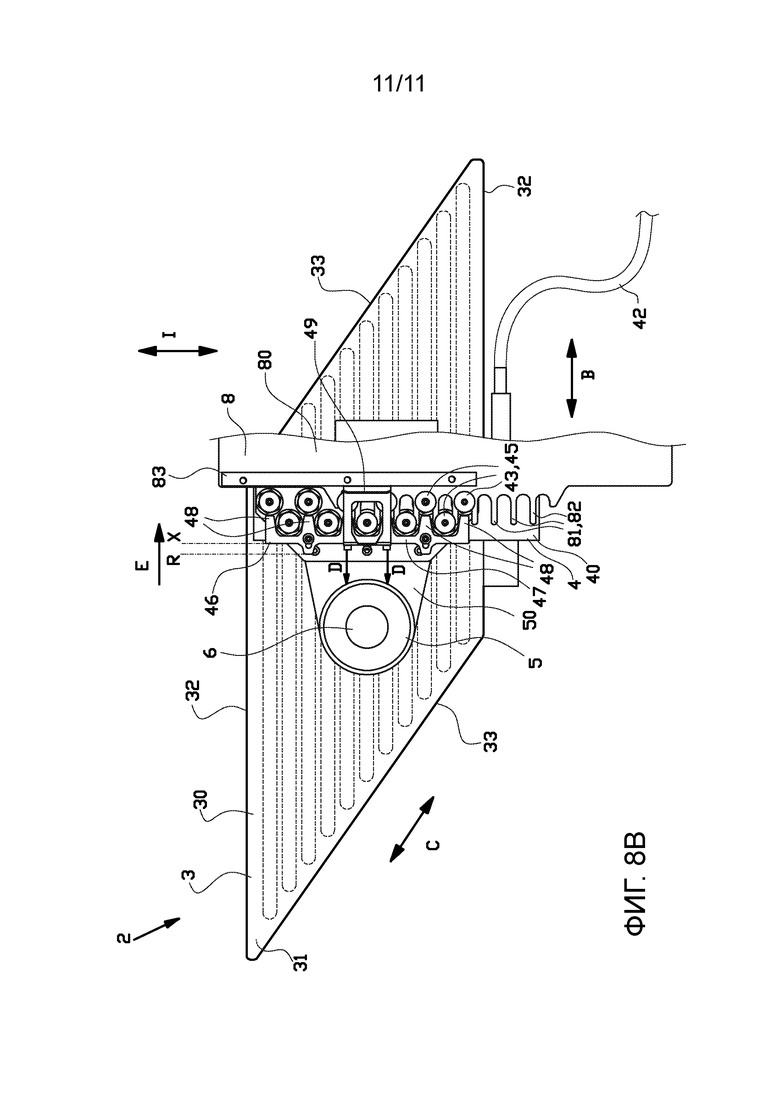
фиг. 8A и 8B - виды сверху захватного устройства, взаимодействующего с конфигурационным инструментом в двух других конфигурациях.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 показывает узел 1 захватного устройства согласно изобретению, для захвата компонента 9 шины, в частности, армированного кордом компонента 9 шины для формирования защитного слоя или слоя каркаса шины. Такие компоненты 9 шины отрезаются от непрерывной полосы армированного кордом резинового материала под углом резания или углом ударного инструмента, чтобы получить корпус 90 из резинового материала с характеристической областью 91 поверхности в форме параллелограмма или ромбоида компонента 9 шины, имеющего контур, сформированный первой парой 92 и второй парой 93 параллельных сторон с косыми углами A между напрямую смежными сторонами.
Как показано на фиг. 1, узел 1 захватного устройства содержит захватное устройство 2 с захватным элементом 3 для захвата и удерживания компонента 9 шины с помощью присасывания, пониженного давления или частичного вакуума, блок 4 трубопровода или вакуумный блок для управления вакуумом, и соединительный элемент 5. Узел 1 захватного устройства также обеспечен манипулятором 6, который скомпонован для присоединения к захватному устройству 2 на соединительном элементе 5, для управления установкой положения захватного устройства 2, например, для установки положения захватного устройства 2 над компонентом 9 шины для захвата и/или перемещения захватного устройства 2 между станциями машины для производства шин (не показана) после захвата компонента 9 шины, чтобы перенести упомянутый компонент 9 шины между упомянутыми станциями. Узел 1 захватного устройства опционально содержит стеллаж или магазин 7 хранения для содержания множества альтернативных захватных элементов 103, 203, 303, 403 для захвата альтернативных компонентов шины разных размеров и/или форм (не показаны). Наконец, узел 1 захватного устройства содержит конфигурационный инструмент 8 для конфигурирования захватного устройства 2. Узел 1 захватного устройства согласно изобретению будет описан более подробно далее в материалах настоящей заявки.
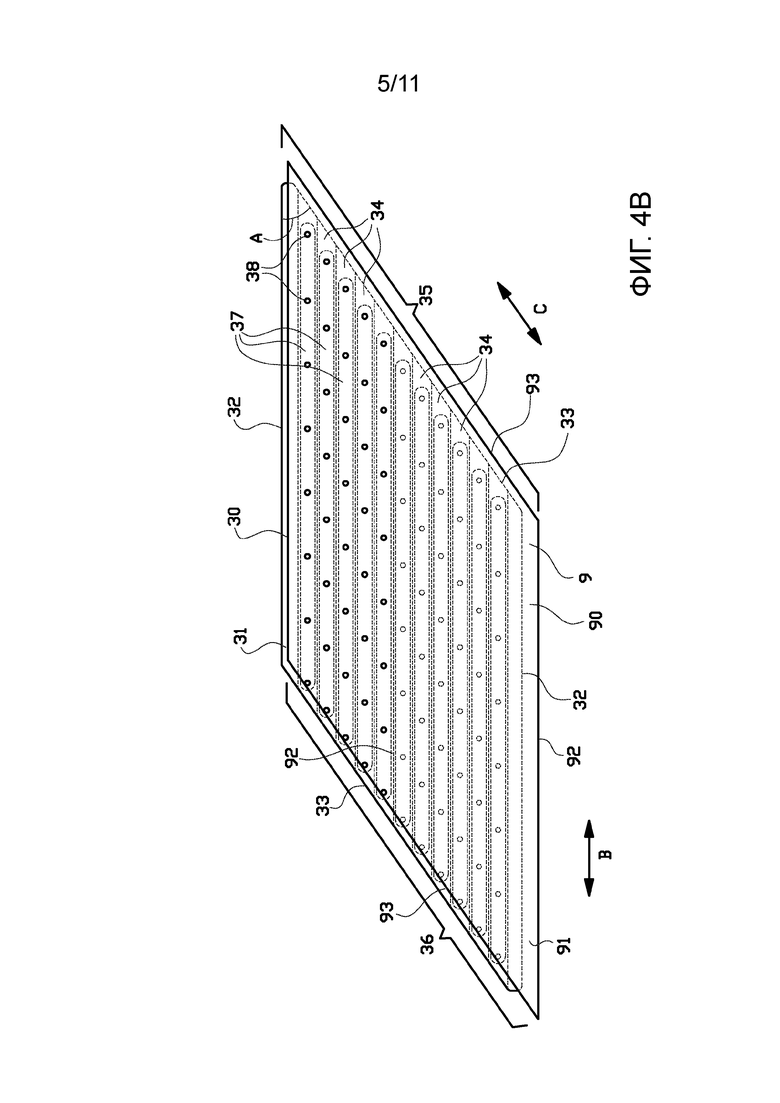
Как показано на фиг. 2, 3, 4A и 4B, захватный элемент 3 содержит плоский или пластинчатый корпус 30, имеющий захватную поверхность 31 в форме параллелограмма или ромбоида с контуром, сформированным первой парой 32 и второй парой 33 параллельных сторон. Первая пара 32 параллельных сторон определяет первое направление B, параллельное упомянутой первой паре 32 параллельных сторон. Вторая пара 33 параллельных сторон определяет второе направление C, параллельное упомянутой первой паре 32 параллельных сторон. Смежные стороны пар 32, 33 параллельных сторон расположены под косыми углами A, равными или по существу равными косым углам A между парами 92, 93 параллельных сторон компонента 9 шины. При использовании, захватная поверхность 31 направлена к корпусу 90 компонента 9 шины и выровнена с каждой из его пар 32, 33 параллельных сторон, выровненных с или параллельных соответствующей одной из пар 92, 93 параллельных сторон компонента 9 шины. Когда они полностью выровнены, захватный элемент 3 приводится в контакт с компонентом 9 шины, и захватная поверхность 31 скомпонована, чтобы захватывать и удерживать область 91 поверхности компонента 9 шины с помощью присасывания, пониженного давления или частичного вакуума.
Чтобы получить частичный вакуум, захватная поверхность 31 разделена на множество секций 34, проходящих в первом направлении B, параллельном первой паре 32 параллельных сторон. Секции 34 смежны друг с другом во втором направлении C, параллельном второй паре 33 параллельных сторон. Секции 34 могут быть приведены в действие по отдельности, чтобы захватывать и удерживать соответствующую часть области 91 поверхности компонента 9 шины. Секции 34 формируют приводимую в действие область 35 захватной поверхности 31, которая покрывает всю или по существу всю захватную поверхность 31. Комбинация секций 34, которые одновременно приведены в действие, формирует приведенную в действие область 36 или область присасывания захватной поверхности 31. В полном режиме, как показано на фиг. 4B, все секции 34 приведены в действие одновременно, так что область 36 присасывания проходит по всей приводимой в действие области 35. В частичном режиме, как показано на фиг. 4A, только группа секций 34 приведена в действие, так что область 36 присасывания проходит только по части приводимой в действие области 35. Каждая секция 34 напрямую смежна с другой из секций 34, с тем чтобы обеспечить возможность формирования области 35 присасывания из цепи или одиночной цепи смежных секций 34 и/или с закрытой или одиночной областью в пределах приводимой в действие области 35.
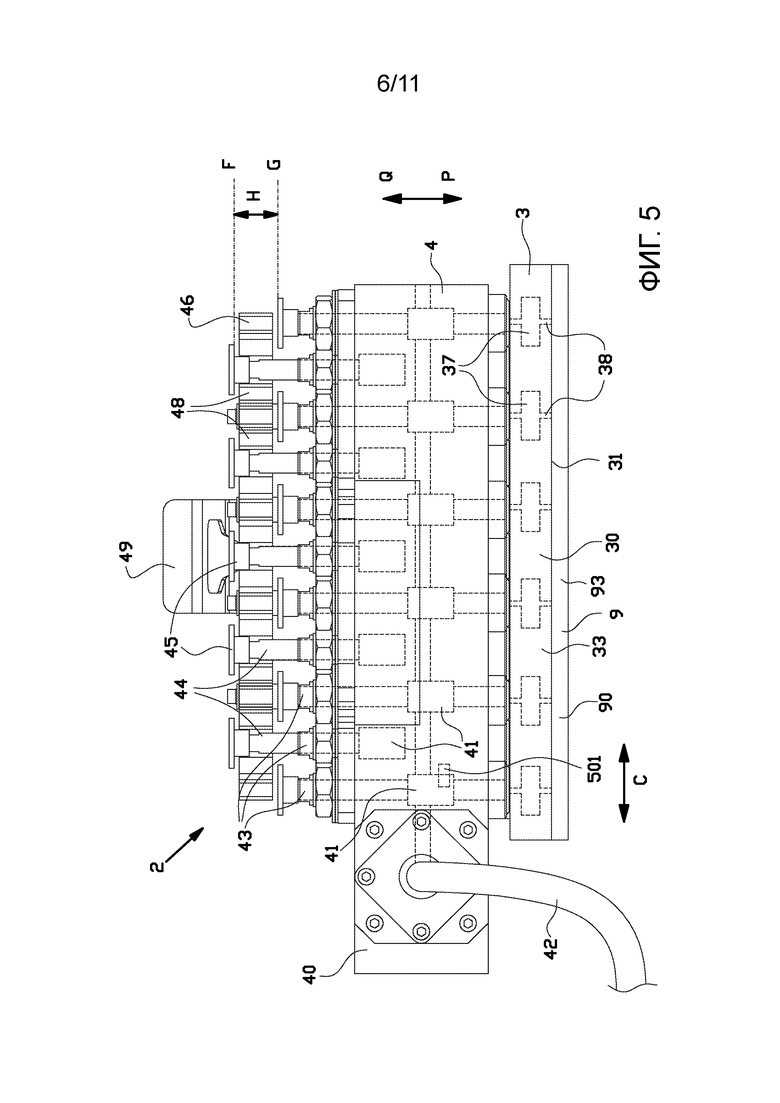
Как показано на фиг. 4A, 4B и 5, для каждой секции 34, захватный элемент 3 обеспечен вакуумным каналом 37, который отдельно входит в соответствующую секцию 34 через множество присасывающих отверстий 38. В данном примере, вакуумные каналы 37 объединены в корпус 30 захватного элемента 3. Присасывающие отверстия 38 равномерно распределены в первом направлении B вдоль длины соответствующей секции 34.
Как показано на фиг. 5, вакуумный блок 4 с возможностью отсоединения или съема установлен на захватный элемент 3 на стороне, противоположной захватной поверхности 31. Вакуумный блок 4 обеспечен корпусом 40 и множеством клапанов 41, содержащихся в упомянутом корпусе 40. Вакуумный блок 4 функционально соединен с источником вакуума (не показан) через гибкий шланг или трубку 42. Вакуумный блок 4 может быть функционально соединен с и отсоединен от источника вакуума посредством главного клапана (не показан), чтобы осуществлять удерживание компонента 9 шины на захватной поверхности 31 и отпускание его с нее. Когда вакуумный блок 4 установлен на захватный элемент 3, каждый клапан 41 выровнен над соответствующим одним из вакуумных каналов 37 и соединен с ним в герметичном соединении и/или сообщение по текучей среде. Клапаны 41 расположены между своими соответствующими вакуумными каналами 37 и источником вакуума. Таким образом, посредством выборочного управления клапанами 41, вакуумные каналы 37 могут быть по отдельности соединены с и отсоединены от источника вакуума, и секции 34, связанные с каждым из вакуумных каналов 37, могут быть приведены в действие по отдельности и/или выборочно.
Как лучше всего видно на фиг. 2, захватное устройство 2 для каждого клапана 41 (как показано на фиг. 5) обеспечено операционным элементом 43, который функционально соединен с соответствующим клапаном 41 и который выполнен с возможностью перемещения между вытянутым вверх положением F и прижатым вниз положением G, чтобы переключать или переводить соответствующий клапан 42 между открытым положением и закрытым положением, соответственно. Клапаны 41 и их соответствующие операционные элементы 43 разнесены в направлении I индексирования или параллельно ему с постоянным интервалом. На фиг. 2, операционные элементы 43 чередующимся образом расположены в первом ряду в прижатом вниз положении G и во втором ряду в вытянутом вверх положении F. Обычно, перед конфигурированием или во время конфигурирования захватного устройства 2, все операционные элементы 43 перемещаются либо в вытянутое вверх положение F, либо в прижатое вниз положение G, после чего операционные элементы 43 выборочно перемещаются в вытянутое вверх положение F или в прижатое вниз положение G согласно установленной конфигурации.
В данном примерном варианте осуществления, операционный элемент 43 выполнен с возможностью перемещения в направлении P прижимания и в направлении Q вытягивания, противоположном направлению P прижимания, чтобы переводить соответствующий клапан 41 (как показано на фиг. 5) в открытое положение и закрытое положение, соответственно. Направление P прижимания и направление Q вытягивания ортогональны или перпендикулярны корпусу 30 захватного элемента 3, при этом операционные элементы 43 прижимаются в закрытое положение F в направлении P прижимания к захватному элементу 3, и вытягиваются в открытое положение E в направлении Q вытягивания вдаль от захватного элемента 3. Операционный элемент 43 содержит стержень 44, который функционально соединен с клапаном 41, в направлении P прижимания, и ручку 45, которая жестко закреплена на стержне 44 в направлении Q вытягивания. Стержень 44 с возможностью скольжения принят в корпус 40 вакуумного блока 4. Ручки 45 имеют такую форму, чтобы быть легко захватываемыми конфигурационным элементом 8 образом, который будет описан ниже в материалах настоящей заявки.
Как показано на фиг. 2, 3 и 5, захватное устройство 2 обеспечено блокирующим инструментом 46, который выполнен с возможностью перемещения относительно операционных элементов 43 между блокирующим положением X, как показано на фиг. 7A, и свободным положением R, как показано на фиг. 7B, для блокировки или позволения, соответственно, движения операционных элементов 43 в направлении P прижимания и направлении Q вытягивания. Как лучше всего видно на фиг. 5, операционные элементы 43 в прижатом вниз положении G и вытянутом вверх положении F разделены промежуточным пространством H и перемещаются через него.
Блокирующий инструмент 46 в блокирующем положении X проходит в промежуточное пространство между соответствующими прижатыми вниз положениями G и соответствующими вытянутыми вверх положениями F, чтобы блокировать движение в направлении P вытягивания любого из операционных элементов 43, которые находятся в прижатом вниз положении G, и чтобы блокировать движение в направлении P прижимания любого из операционных элементов 43, которые находятся в вытянутом вверх положении F. В частности, блокирующий инструмент 46 обеспечен основанием 47 и множеством блокирующих элементов 48, проходящих от основания 47 и зацепляющихся между операционными элементами 43. Основание 47 скомпоновано, чтобы перемещаться над или под ручками 45 операционных элементов 43, которые находятся в ряду, ближайшем к основанию 47, в то время как дальние концы блокирующих элементов 48 относительно основания 47 скомпонованы, чтобы перемещаться над или под ручками 45 операционных элементов 43, которые находятся в ряду, который расположен дальше от основания 47. В данном примерном варианте осуществления, блокирующий инструмент 46 с возможностью скольжения принят в вакуумный блок 4, например, в данном случае, с использованием щелей в основании 47, которые выполнены с возможностью скольжения относительно болтов, установленных в вакуумный блок 4. Блокирующий инструмент 46 также обеспечен примыкающим элементом 49, например, в форме скобы, для перемещения или смещения блокирующего элемента 46 между блокирующим положением X и свободным положением R посредством примыкания с помощью внешнего инструмента, например, конфигурационного инструмента 8. Блокирующий инструмент 46 смещается, чтобы перемещаться в блокирующее положение X посредством одного или более смещающих элементов, например, пружины (не показана).
Как показано на фиг. 2, захватное устройство 2 опционально обеспечено датчиком 500 зазора для детектирования того, что блокирующий инструмент 46 возвращается в правильное блокирующее положение X. Если блокирующий инструмент 46 не возвращается в блокирующее положение X, это может указывать на то, что один из операционных элементов 43 не полностью переместился в свое вытянутое вверх положение F или прижатое вниз положение G и блокирует перемещение блокирующего инструмента 46 в направлении E захвата.
Как показано на фиг. 1 и 2, манипулятор 6 скомпонован, чтобы захватывать захватный элемент 3 на соединительном элементе 5, который в данном примере с возможностью отсоединения или съема установлен на захватный элемент 3 вместе с вакуумным блоком 4 или через него. Предпочтительно, соединительный элемент 5 неподвижно закреплен на блоке 4 клапанов, например, с помощью соединительной пластины 50, как показано на фиг. 2. Это обеспечивает возможность простого извлечения блока 4 клапанов и соединительного элемента 5 с использованием манипулятора 6 и установки упомянутого блока 4 клапанов и соединительного элемента 5 на один из альтернативных захватных элементов 103, 203, 403 с использованием манипулятора 6.
Как показано на фиг. 1, манипулятор 6 скомпонован для захвата захватного устройства 2 на соединительном элементе 5 и для перемещения захватного элемента 3 между конфигурационным положением на или рядом с конфигурационным инструментом 8, магазином 7 для замены захватных элементов 3, 103, 203, 303, 403 и одной или более станций и/или барабана для вулканизации шин машины для производства шин (не показана) для подъема, переноса и размещения компонента 9 шины в пределах упомянутой машины для производства шин. Предпочтительно, манипулятор 6 скомпонован для управления положением захватного элемента 3 в трех измерениях и/или относительно трех осей прямоугольной системы координат. Более предпочтительно, манипулятор 6 является роботом, например, роботом с шестью степенями свободы (6DoF).
Магазин 7 содержит раму 70 с несколькими креплениями 71 для временного хранения захватных элементов 3, 103, 203, 403, принятых с манипулятора 6. Альтернативные захватные элементы 103, 203, 303, 403 поддерживаются рамой 70 в такой ориентации, чтобы манипулятор 6 мог достать и зацепить каждый из альтернативных захватных элементов 103, 203, 303, 403. Альтернативные захватные элементы 103, 203, 303, 403 отличаются от захватного элемента 3, как показано на фиг. 2, размером и/или углом A между смежными сторонами. Количество вакуумных каналов и их взаимное расположение в альтернативных захватных элементах 103, 203, 303, 403 идентичны захватному элементу 3, таким образом позволяя тому же вакуумному блоку 4 быть универсально прикрепляемым к каждому из альтернативных захватных элементов 103, 203, 303, 403 и универсально соединять клапаны 41 (как показано на фиг. 5) в герметичном соединении и/или сообщение по текучей среде с соответствующими вакуумными каналами в альтернативных захватных элементах 103, 203, 303, 403. При замене одного захватного элемента 3 на альтернативный захватный элемент 103, 203, 303, 403, соединительный элемент 5 и блок 4 клапанов отсоединяются от захватного элемента 3 и удерживаются на манипуляторе 6. Только захватный элемент 3 освобождается и размещается манипулятором 6 на креплении 71 на раме 70. Затем, соединительный элемент 5 и блок 4 клапанов повторно прикрепляются к одному из альтернативных захватных элементов 103, 203, 303, 403, который после этого становится готовым для работы.
Захватный элемент 3 и альтернативные захватные элементы 103, 203, 303, 403 опционально обеспечены детектируемыми метками, например, метками RFID (радиочастотной идентификации), в то время как блок 4 клапана и/или манипулятор 6 обеспечены средствами детектирования для детектирования упомянутых меток. Таким образом, захватные элементы 3, 103, 203, 303, 403 могут быть распознаны, и процесс может быть настроен соответственно, чтобы принять во внимание размеры и/или углы выбранного захватного элемента 3, 103, 203, 303, 403.
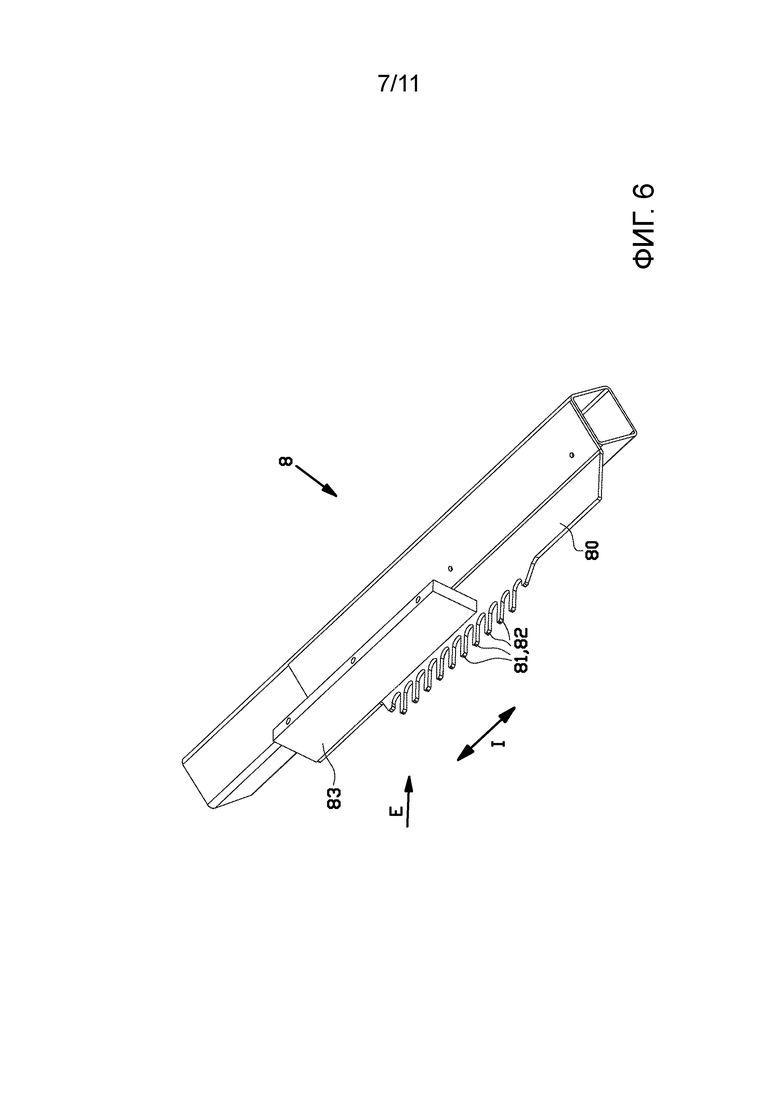
Как показано на фиг. 6, конфигурационный элемент 8 содержит основание 80 и множество конфигурационных элементов 81, проходящих от упомянутого основания 80 в направлении E захвата к операционным элементам 43, когда захватное устройство 2 находится в конфигурационном положении на конфигурационном инструменте 8 или рядом с ним. Конфигурационные элементы 81 скомпонованы, чтобы взаимодействовать с операционными элементами 43, чтобы переводить соответствующие клапаны 41 (как показано на фиг. 5) в их открытые положения и их закрытые положения. В частности, конфигурационные элементы 81 скомпонованы, чтобы прижимать и вытягивать операционные элементы 43 в направлении P прижимания и направлении Q вытягивания, соответственно, между прижатым вниз положением G и вытянутым вверх положением F, чтобы переводить соответствующие клапаны 41 в их открытые положения и их закрытые положения, соответственно. В данном примерном варианте осуществления, конфигурационные элементы 81 являются пальцами 82, которые скомпонованы, чтобы зацепляться с, взаимодействовать с или захватывать ручки 45 операционных элементов 43 для перемещения упомянутых операционных элементов 43 в направлении P прижимания или направлении Q вытягивания. Пальцы 82 разнесены с таким же постоянным интервалом, как операционные элементы 43, в направлении I индексирования. Конфигурационный инструмент 8 обеспечен сдвигающим элементом 83, выступающим из основания 80. Сдвигающий элемент 83 скомпонован, чтобы примыкать к примыкающему элементу 49 блокирующего инструмента 46 в направлении E захвата, чтобы сдвигать блокирующий инструмент 46 в направлении D сдвига из блокирующего положения X в свободное положение R, когда конфигурационный инструмент 8 находится в конфигурационном положении относительно захватного устройства 2, как показано на фиг. 7B.
Этапы конфигурирования захватного устройства 2 для захвата и удерживания конкретного компонента 9 шины описаны более подробно далее в материалах настоящей заявки со ссылкой на фиг. 7A и 7B и фиг. 8A и 8B.
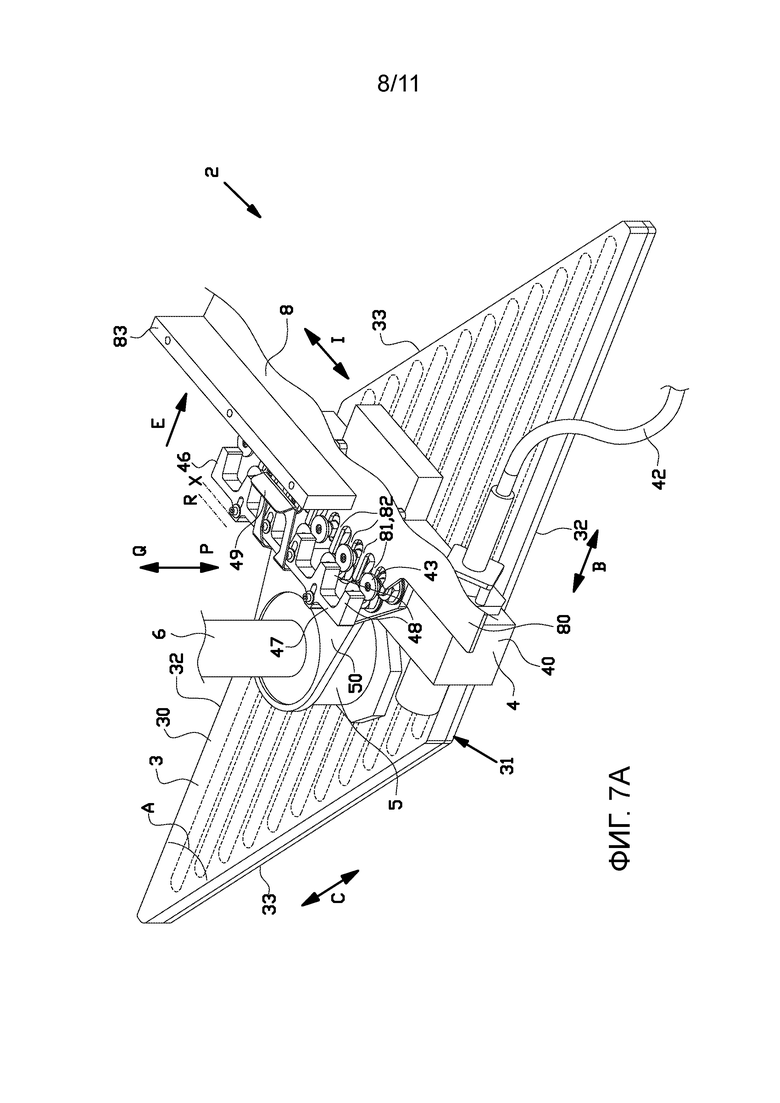
Во время этапов конфигурирования, как показано на фиг. 7A и 7B, конфигурационный инструмент 8 поддерживается неподвижно в конфигурационном положении, в то время как захватное устройство 2, включающее в себя захватный элемент 3, перемещается и/или устанавливается манипулятором 6 в конфигурационное положение на конфигурационном инструменте 8 или рядом с ним. В качестве альтернативы, конфигурационный инструмент 8 может быть перемещен в направлении захватного устройства 2, в случае чего захватное устройство 2 поддерживается неподвижно в конфигурационном положении во время конфигурирования. В упомянутом конфигурационном положении, как показано на фиг. 7A, пальцы 82 конфигурационного инструмента 8 выровнены в направлении E захвата относительно захватного устройства 2, с тем чтобы зацепляться между операционными элементами 43. Затем, манипулятор 6 перемещает сдвигающий элемент 83 в примыкание с примыкающим элементом 49 в направлении E захвата. После начального примыкания, манипулятор 6 перемещает захватное устройство 2 дальше в направлении E захвата, с тем чтобы сдвигающий элемент 83 фактически сдвигал блокирующий инструмент 46 посредством примыкающего элемента 49 из блокирующего положения X в свободное положение R, как показано на фиг. 7B. Теперь, ручки 45 операционных элементов 43 больше не заблокированы блокирующим инструментом 46, и операционные элементы 43 могут свободно перемещаться конфигурационным инструментом 8 в направлении P прижимания и направлении Q вытягивания.
Перед первым этапом или в качестве первого этапа конфигурирования, все операционные элементы 43 перемещаются в одинаковое положение, либо вытянутое вверх положение F, либо прижатое вниз положение G. Этот предварительный этап по существу такой же, как этапы реального конфигурирования. Таким образом, будет сделана ссылка на описание этапов конфигурирования ниже.
С перемещением захватного устройства 2 в направлении E захвата, конфигурационные элементы 81 устанавливаются в положение либо над ручками 45 операционных элементов 43, которые находятся в вытянутом вверх положении F, либо под ручками 45 операционных элементов 43, которые находятся в прижатом вниз положении G. Когда они проходят под ручками 45, пальцы 82 скомпонованы, чтобы зацепляться с и/или продолжаться между стержнями 44 операционных элементов 43. Пальцы 82 разнесены, чтобы обеспечивать возможность расположения стержней 44 между пальцами 82, в то же время находясь достаточно близко друг к другу для примыкания к ручкам 45 в направлении Q вытягивания. Более того, пальцы 82 проходят в направлении захвата за пределы первого ряда вплоть до стержней 43 операционных элементов 43 во втором ряду и рядом с ними. С конфигурационными элементами 81 в положении для взаимодействия с операционными элементами 43, манипулятор 6 перемещает захватное устройство 2 относительно конфигурационного инструмента 8 в направлении P прижимания или направлении Q вытягивания, с тем чтобы захваченные операционные элементы 43 перемещались неподвижным конфигурационным инструментом 8 либо в направлении Q вытягивания, либо в направлении P прижимания, соответственно.
Количество операционных элементов 43, которые захвачены и перемещаются конфигурационным инструментом 8, определяет количество секций 34 захватного элемента 3, которые приведены в действие, чтобы сформировать область 36 присасывания, которая может являться полной приводимой в действие областью 35 в полном режиме или только частью приводимой в действие области 35 в частичном режиме. Количество операционных элементов 43, которые захвачены конфигурационным инструментом 8, может быть настроено посредством перемещения захватного устройства 2 вдоль направления I индексирования или параллельно ему в положение индексирования согласно количеству операционных элементов 43, которые должны быть захвачены. Захватное устройство 2 выполнено с возможностью расположения относительно конфигурационного инструмента 8 во множестве положений индексирования, которые разнесены с одинаковым или постоянным интервалом, как и конфигурационные элементы 81 и операционные элементы 43. Для каждого положения индексирования вдоль направления I индексирования, конфигурационные элементы 81 конфигурационного инструмента 8 скомпонованы, чтобы взаимодействовать или зацепляться с, взаимодействовать с или захватывать разное количество операционных элементов 43. Чем дальше положение индексирования смещено относительно центра захватного устройства 2, тем меньше операционных элементов 43 захвачено. Так как интервал между конфигурационными элементами 81 и операционными элементами 43 одинаковый, конфигурационные элементы 81 всегда будут захватывать компактную, последовательную или закрытую группу напрямую смежных операционных элементов 43, с тем чтобы привести в действие компактную, последовательную или закрытую группу или цепь напрямую смежных секций 34. В примере по фиг. 8B, захватное устройство 2 смещено относительно конфигурационного инструмента 8 вдоль направления I индексирования в положение индексирования, в котором последние четыре операционных элемента 43 не захвачены конфигурационным инструментом 8, и, таким образом, остаются в своем начальном положении. Операционные элементы 43, которые захвачены, одновременно перемещаются конфигурационным инструментом 8 либо в вытянутое вверх положение F, либо в опущенное вниз положение G, чтобы открыть или закрыть, соответственно, соответствующие клапаны 41 (как показано на фиг. 5).
Как показано на фиг. 8A и 8B, сдвигающий элемент 83 является достаточно длинным в направлении I индексирования, чтобы примыкать к примыкающему элементу 49 по меньшей мере в половине положений индексирования вдоль направления I индексирования.
Таким образом, посредством выборочного захвата определенного количества операционных элементов 43 с помощью конфигурационного инструмента 8, область 36 присасывания может быть настроена, чтобы по существу совпадать или соответствовать области 91 поверхности компонента 9 шины, для надежного захвата и удерживания компонента 9 шины на захватной поверхности 31. В частности, ширина области 36 присасывания во втором направлении C может быть настроена, чтобы совпадать с шириной компонента 9 шины в упомянутом направлении. Длина последовательно обрабатываемых компонентов 9 шины может меняться, например, при формировании защитных слоев из чередующихся более коротких и более длинных компонентов 9 шины.
Удерживание и отпускание компонента шины осуществляется посредством главного клапана (не показан) в средстве 42 подачи вакуума, которое соединено с вакуумным блоком 4. Чтобы дополнительно облегчить отпускание компонента 9 шины с захватного элемента 3, упомянутый захватный элемент 3 может быть дополнительно обеспечен множеством каналов отпускания или отверстий отпускания между отверстиями 38 присасывания соответствующих секций 34, через которые давление может прикладываться к компоненту 9 шины, чтобы отсоединить компонент 9 шины от захватной поверхности 31.
В предпочтительном варианте осуществления изобретения, как показано на фиг. 5, первая секция 41 ниже по потоку от средства подачи вакуума всегда поддерживается открытой, и оборудована датчиком 501 давления ниже по потоку от источника вакуума. Когда компонент 9 шины полностью захвачен, этот датчик 501 будет детектировать частичный вакуум, который близок к или совпадает со значением частичного вакуума источника вакуума. Неполный захват и/или частичное присутствие компонента 9 шины, таким образом, детектируется, когда значение частичного вакуума, измеряемое датчиком 501, не совпадает со значением частичного вакуума источника вакуума.
Альтернативные захватные элементы 103, 203, 303, 403 поддерживаются готовыми для использования в магазине 5, в пределах диапазона манипулятора 6. Альтернативные захватные элементы 103, 203, 303, 403 функционально схожи, эквивалентны или идентичны захватному элементу 3, и отличаются от захватного элемента 3 только длиной пар параллельных сторон и/или косым углом между напрямую смежными сторонами. Таким образом, компоненты шины (не показаны), которые отрезаются с разной длиной, шириной и/или разными углами резания, могут быть надежно захвачены одним из альтернативных захватных элементов 103, 203, 303, 403, который имеет подходящую форму и размер. Как правило, производитель шин имеет только ограниченный диапазон компонентов шин, таким образом, требуя только ограниченного количества альтернативных захватных элементов 103, 203, 303, 403.
Стоит понимать, что вышеприведенное описание включено, чтобы проиллюстрировать работу предпочтительных вариантов осуществления, и не предназначено для ограничения объема изобретения. Из вышеприведенного обсуждения, многие изменения будут очевидны специалисту в данной области техники, которые все еще будут охвачены объемом настоящего изобретения.
Например, множество узлов захватных устройств, таких как узел 1 захватного устройства, как показано на фиг. 1, могут использоваться для переноса компонентов 9 шины на другие производственные линии, например, для производства защитных слоев других размеров и форм. В такой ситуации, конфигурационные инструменты 8 обоих узлов 1 захватного устройства могут быть объединены в один конфигурационный инструмент (не показан), который расположен в пределах диапазона обоих манипуляторов 6, чтобы одновременно или поочередно конфигурировать захватные устройства 2 каждого из узлов 1 захватного устройства.
Таким образом, изобретение относится к узлу захватного устройства и способу для захвата компонента шины, в котором узел захватного устройства обеспечен захватным устройством, содержащим захватный элемент с захватной поверхностью, чтобы захватывать и удерживать компонент шины с помощью присасывания, при этом захватная поверхность содержит множество секций, при этом захватное устройство для каждой секции содержит вакуумный канал и клапан, который расположен между вакуумным каналом соответствующей секции и источником вакуума, при этом каждый клапан может быть по отдельности переведен в открытое положение и закрытое положение, при этом, при использовании, захватная поверхность содержит область присасывания, сформированную из секций, соответствующие клапаны которых находятся в открытом положении, при этом область присасывания может быть настроена посредством выборочного перевода множества клапанов в открытые положения и закрытые положения, при этом узел захватного устройства дополнительно содержит конфигурационный инструмент, который, в конфигурационном положении, скомпонован, чтобы переводить соответствующие клапаны в их открытые положения и их закрытые положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПАКОВОЧНЫЙ АППАРАТ | 2009 |
|
RU2536445C2 |
| ЗАХВАТНОЕ УСТРОЙСТВО С ЗАХВАТНЫМ УЗЛОМ БЕРНУЛЛИ И ВАКУУМНЫМ ЗАХВАТНЫМ УЗЛОМ | 2017 |
|
RU2767926C2 |
| СПОСОБ МНОГОЯРУСНОГО КОМПОНОВАНИЯ И ПЕРЕКОМПОНОВАНИЯ РАБОЧЕЙ ПОЗИЦИИ АВТОМАТИЧЕСКОЙ ЛИНИИ И ПЕРЕКОМПОНУЕМАЯ РАБОЧАЯ ПОЗИЦИЯ АВТОМАТИЧЕСКОЙ ЛИНИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2011 |
|
RU2487004C2 |
| Автооператор | 1986 |
|
SU1364430A1 |
| УСТРОЙСТВО ДЛЯ РОБОТ-АССИСТИРОВАННОЙ ХИРУРГИИ | 2015 |
|
RU2704961C2 |
| СПОСОБ ДЛЯ НАРЕЗАНИЯ ПИЩЕВЫХ ПРОДУКТОВ В ФОРМЕ ЖГУТА, А ТАКЖЕ РЕЗАЛЬНАЯ МАШИНА | 2009 |
|
RU2482960C2 |
| Устройство для формовки выводов микросхемы и узел центровки микросхем для этого устройства | 2016 |
|
RU2644020C1 |
| Респиратор с клапаном, содержащим область захвата | 2015 |
|
RU2677082C2 |
| УСТРОЙСТВО И СПОСОБ ИЗГОТОВЛЕНИЯ ВАФЕЛЬНЫХ БЛОКОВ | 2012 |
|
RU2592445C2 |
| СИСТЕМА ДЛЯ ПАКОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2515139C2 |
Изобретение относится к узлу захватного устройства. Техническим результатом является улучшение гибкости захватного устройства. Технический результат достигается узлом захватного устройства, содержащим захватное устройство, содержащее захватный элемент с захватной поверхностью, чтобы захватывать и удерживать компонент шины с помощью присасывания. При этом захватная поверхность содержит множество секций. Захватное устройство для каждой секции содержит вакуумный канал и клапан, который расположен между вакуумным каналом соответствующей секции и источником вакуума. При этом каждый клапан может быть по отдельности переведен в открытое положение и закрытое положение. При использовании захватная поверхность содержит область присасывания, сформированную из секций, соответствующие клапаны которых находятся в открытом положении. При этом область присасывания может быть настроена посредством выборочного перевода множества клапанов в открытые положения и закрытые положения. Причем узел захватного устройства дополнительно содержит конфигурационный инструмент, который в конфигурационном положении скомпонован, чтобы переводить соответствующие клапаны в их открытые положения и их закрытые положения. 2 н. и 31 з.п. ф-лы, 11 ил.
1. Узел захватного устройства для захвата компонента шины, содержащий захватное устройство, содержащее захватный элемент с захватной поверхностью, которая выполнена с возможностью захватывания и удержания компонента шины с помощью присасывания, причем захватная поверхность содержит множество секций, при этом захватное устройство для каждой секции содержит вакуумный канал, который входит в соответствующую секцию в захватной поверхности для удерживания компонента шины на соответствующей секции, и клапан, который расположен между вакуумным каналом соответствующей секции и источником вакуума, причем каждый клапан выполнен с возможностью отдельного переведения в открытое положение, в котором клапан соединяет по текучей среде вакуумный канал соответствующей секции с источником вакуума, и закрытое положение, в котором клапан отсоединяет вакуумный канал соответствующей секции от источника вакуума, при этом при использовании захватная поверхность имеет область присасывания, сформированную из секций, соответствующие клапаны которых находятся в открытом положении, причем область присасывания выполнена с возможностью регулировки посредством выборочного перевода множества клапанов в открытые положения и закрытые положения, при этом узел захватного устройства дополнительно содержит конфигурационный инструмент, причем захватное устройство и конфигурационный инструмент выполнены с возможностью расположения относительно друг друга в конфигурационном положении для управления клапанами, при этом захватное устройство для каждого клапана имеет операционный элемент, который функционально соединен с соответствующим клапаном, чтобы переводить соответствующий клапан в открытое положение и закрытое положение, причем конфигурационный инструмент имеет множество конфигурационных элементов, которые в конфигурационном положении выполнены с возможностью взаимодействия с операционными элементами, чтобы переводить соответствующие клапаны в их открытые положения и их закрытые положения.
2. Узел захватного устройства по п. 1, в котором каждый операционный элемент выполнен с возможностью перемещения в направлении прижимания и направлении вытягивания, противоположном направлению прижимания, чтобы переводить соответствующий клапан в открытое и закрытое положение, при этом конфигурационные элементы выполнены с возможностью прижатия и вытягивания операционных элементов, чтобы переводить соответствующие клапаны в их открытые положения и их закрытые положения.
3. Узел захватного устройства по п. 2, в котором каждый операционный элемент содержит стержень, который функционально соединен с клапаном в направлении прижимания, и ручку, которая жестко закреплена на стержне в направлении вытягивания, при этом конфигурационные элементы являются пальцами, которые выполнены с возможностью зацепления с, взаимодействия с или захвата ручки операционных элементов для перемещения упомянутых операционных элементов в направлении прижимания или направлении вытягивания.
4. Узел захватного устройства по п. 1, в котором операционные элементы разнесены в направлении индексирования или параллельно ему с постоянным интервалом, при этом конфигурационные элементы разнесены с таким же постоянным интервалом.
5. Узел захватного устройства по п. 4, в котором одно из захватного устройства и конфигурационного инструмента выполнено с возможностью расположения относительно другого из захватного устройства и конфигурационного инструмента в различных положениях индексирования вдоль направления индексирования, при этом положения индексирования разнесены с таким же постоянным интервалом, как операционные элементы и конфигурационные элементы, причем конфигурационные элементы выполнены с возможностью зацепления с, взаимодействия с или захвата разного количество операционных элементов для каждого положения индексирования вдоль направления индексирования.
6. Узел захватного устройства по п. 4, в котором конфигурационные элементы, при зацеплении с, взаимодействии с или захвате двух или более из операционных элементов, выполнены с возможностью зацепления с, взаимодействия с или захвата закрытой группы двух или более смежных операционных элементов в направлении индексирования или параллельно ему.
7. Узел захватного устройства по п. 1, дополнительно содержащий манипулятор, который соединен с захватным устройством для установки положения захватного устройства относительно компонента шины.
8. Узел захватного устройства по п. 1, в котором захватное устройство содержит блок клапанов, который установлен на захватный элемент и который содержит клапаны в сообщение по текучей среде с вакуумными каналами, при этом узел захватного устройства содержит по меньшей мере один альтернативный захватный элемент для захвата и удерживания альтернативного компонента шины другого размера и/или формы с помощью присасывания, причем блок клапанов выполнен с возможностью отсоединения от захватного элемента и с возможностью установки на по меньшей мере один альтернативный захватный элемент.
9. Узел захватного устройства по п. 8, дополнительно содержащий манипулятор, который соединен с захватным устройством для установки положения захватного устройства относительно компонента шины, при этом захватное устройство обеспечено соединительным элементом, который неподвижно закреплен на блоке клапанов, причем манипулятор выполнен с возможностью захвата захватного устройства на соединительном элементе.
10. Узел захватного устройства по п. 7, в котором конфигурационный инструмент выполнен неподвижным, при этом манипулятор выполнен с возможностью перемещения захватного устройства в область вблизи неподвижного конфигурационного инструмента, чтобы конфигурационный инструмент находился в конфигурационном положении относительно захватного устройства, причем манипулятор дополнительно выполнен с возможностью перемещения захватного устройства относительно неподвижного конфигурационного инструмента, чтобы конфигурационные элементы взаимодействовали с операционными элементами, чтобы переводить соответствующие клапаны в их открытые положения и их закрытые положения.
11. Узел захватного устройства по п. 2, дополнительно содержащий блокирующий инструмент, который выполнен с возможностью перемещения относительно операционных элементов между свободным положением и блокирующим положением для позволения или блокировки, соответственно, перемещения операционных элементов в направлении прижимания и направлении вытягивания.
12. Узел захватного устройства по п. 11, в котором операционные элементы выполнены с возможностью перемещения в направлении прижимания и направлении вытягивания между прижатым вниз положением и вытянутым вверх положением, соответственно, которые разделены промежуточным пространством, при этом блокирующий инструмент содержит множество блокирующих элементов, которые в блокирующем положении проходят в промежуточное пространство между соответствующими прижатыми вниз положениями и соответствующими вытянутыми положениями, чтобы блокировать перемещение в направлении вытягивания любого из операционных элементов, которые находятся в прижатом вниз положении, и чтобы блокировать перемещение в направлении прижимания любого из операционных элементов, которые находятся в вытянутом вверх положении.
13. Узел захватного устройства по п. 11, в котором конфигурационный инструмент имеет сдвигающий элемент, который выполнен с возможностью сдвигания блокирующего инструмента из блокирующего положения в свободное положение, когда конфигурационный инструмент находится в конфигурационном положении относительно захватного устройства.
14. Узел захватного устройства по п. 13, в котором блокирующий инструмент обеспечен примыкающим элементом, при этом сдвигающий элемент выполнен с возможностью примыкания к блокирующему инструменту на примыкающем элементе, чтобы сдвигать блокирующий инструмент с помощью примыкания.
15. Узел захватного устройства по п. 13, в котором захватное устройство имеет смещающий элемент для смещения блокирующего инструмента в блокирующее положение, при этом сдвигающий элемент выполнен с возможностью сдвигания блокирующего инструмента против смещения в свободное положение.
16. Узел захватного устройства по п. 11, в котором блокирующий инструмент обеспечен на захватном устройстве и выполнен с возможностью перемещения относительно операционных элементов между свободным положением и блокирующим положением.
17. Узел захватного устройства по п. 16, дополнительно содержащий датчик зазора для детектирования возвращения блокирующего инструмента из свободного положения в блокирующее положение.
18. Узел захватного устройства по п. 1, в котором одна из секций обеспечена датчиком давления для детектирования давления в упомянутой секции.
19. Узел захватного устройства по п. 1, в котором секции формируют приводимую в действие область захватной поверхности, при этом область присасывания может быть настроена на полный режим, в котором область присасывания проходит по всей приводимой в действие области, и частичный режим, в котором область присасывания проходит только по части приводимой в действие области.
20. Узел захватного устройства по п. 19, в котором каждая секция напрямую смежна с другой из секций, чтобы обеспечивать возможность формирования области присасывания из одиночной цепи смежных секций.
21. Узел захватного устройства по п. 1, в котором область присасывания является настраиваемой, чтобы совпадать с областью поверхности компонента шины, который должен быть захвачен.
22. Узел захватного устройства по п. 1, в котором компонент шины имеет контур в форме параллелограмма или ромбоида с двумя парами параллельных сторон, при этом захватная поверхность имеет контур в форме параллелограмма или ромбоида с двумя парами параллельных сторон для удерживания компонента шины на захватной поверхности с каждой парой параллельных сторон компонента шины, проходящей параллельно одной из пар параллельных сторон захватной поверхности.
23. Узел захватного устройства по п. 22, в котором секции проходят в первом направлении, параллельном одной из пар параллельных сторон захватной поверхности.
24. Узел захватного устройства по п. 23, в котором секции смежны друг с другом во втором направлении, параллельном другой из пар параллельных сторон захватной поверхности.
25. Узел захватного устройства по п. 22, в котором секции покрывают всю захватную поверхность в первом направлении.
26. Узел захватного устройства по п. 22, в котором секции покрывают всю захватную поверхность во втором направлении.
27. Способ для захвата компонента шины с помощью узла захватного устройства по п. 1, включающий этап регулировки области присасывания посредством выборочного перевода множества клапанов в открытые положения и закрытые положения.
28. Способ по п. 27, при котором секции формируют приводимую в действие область захватной поверхности, при этом способ включает этап регулировки области присасывания на полный режим, в котором область присасывания проходит по всей приводимой в действие области, и частичный режим, в котором область присасывания проходит только по части приводимой в действие области.
29. Способ по п. 27, при котором область присасывания формируют одиночной цепью смежных секций.
30. Способ по п. 27, при котором область присасывания настраивают так, чтобы она совпадала с областью поверхности компонента шины, который должен быть захвачен.
31. Способ по п. 27, при котором этап регулировки области присасывания на конкретную конфигурацию включает этапы конфигурирования, заключающиеся в одновременном переводе всех клапанов в открытое положение или закрытое положение и по существу одновременном переводе выборочного набора клапанов в открытое положение или закрытое положение согласно конкретной конфигурации области присасывания.
32. Способ по п. 27, при котором клапан для по меньшей мере одной из секций поддерживают открытым, чтобы детектировать присутствие или частичное присутствие компонента шины в упомянутой одной секции с помощью измерения давления в упомянутой одной секции.
33. Способ по п. 27, при котором захватное устройство содержит блок клапанов, который установлен на захватный элемент и который содержит клапаны в сообщении по текучей среде с вакуумными каналами, при этом узел захватного устройства содержит по меньшей мере один альтернативный захватный элемент для захвата и удерживания альтернативного компонента шины другого размера и/или формы с помощью присасывания, причем способ включает этап отсоединения блока клапанов от захватного элемента и установки блока клапанов на по меньшей мере один альтернативный захватный элемент.
| US 5609377 A, 11.03.1997 | |||
| JP 5146983 A, 15.06.1993 | |||
| US 20130129464 A1, 23.05.2013 | |||
| WO 2012172484 A2, 20.12.2012 | |||
| US 20100068012 A1, 18.03.2010 | |||
| Манипулятор | 1983 |
|
SU1085812A1 |

