Изобретение касается захватного устройства для концевого эффектора (рабочий орган) манипулятора по п.1 формулы изобретения, концевого эффектора для манипулятора по п.11 формулы изобретения, а также манипулятора по п.13 формулы изобретения.
Из уровня техники известны разные виды захватных устройств для концевых эффекторов манипуляторов. Вакуумные захватные устройства имеют, как правило, всасывающую камеру, в которой создается статическое пониженное давление для удерживания заготовки. Это пониженное давление может создаваться по принципу Вентури или посредством источника пониженного давления. Вакуумные захватные устройства удерживают заготовку чаще всего неподвижно. Тогда во время удерживания она не может смещаться относительно захватного устройства. В отличие от этого, захватные устройства Бернулли создают поток между захватным устройством и заготовкой таким образом, что между захватным устройством Бернулли и заготовкой возникает пониженное давление для удерживания заготовки. Это пониженное давление поддерживается только до тех пор, пока существует поток, вследствие чего для удерживания требуется относительно много энергии, так как поток должен поддерживаться непрерывно. Далее, захватные устройства Бернулли могут удерживать заготовки чаще всего плавающим образом. Тогда заготовки во время удерживания могут смещаться относительно захватного устройства.
В основе изобретения лежит задача, предоставить надежное, компактное и экономично эксплуатируемое захватное устройство, которое может применяться гибко также для заготовок различных размеров.
Решается эта задача с помощью захватных устройств с признаками п.1 формулы изобретения.
Благодаря наличию захватного узла Бернулли, который имеет выпускной узел для вывода потока из захватного узла Бернулли между захватным устройством и поверхностью заготовки таким образом, чтобы этим потоком в некоторой области - Бернуллиевской области пониженного давления - могло создаваться статическое пониженное давление для удерживания заготовки, заготовка может удерживаться по типу захватного узла Бернулли.
Благодаря наличию вакуумного захватного узла, который имеет всасывающую камеру, при этом в ограниченной всасывающей камерой области - вакуумной области пониженного давления - может создаваться статическое давление для удерживания заготовки, заготовка может удерживаться особенно энергоэкономичным образом.
Для создания компактного и гибкого захватного устройства в соответствии с изобретением также предусмотрено, что Бернуллиевская область пониженного давления и вакуумная область пониженного давления по меньшей мере частично пересекаются, или Бернуллиевская область пониженного давления и вакуумная область пониженного давления окружают друг друга. Благодаря этому можно также особенно гибко манипулировать заготовками различного размера. То есть здесь не является важным растровое расстояние между захватными устройствами различного типа, так как предлагаемое захватное устройство объединяет в себе оба функциональных принципа.
В настоящем случае заготовка захватывается по своей поверхности. Захватываемая заготовка может по меньшей мере частично состоять из материала, имеющего устойчивую форму или не держащего форму. В частности, захватываемые заготовки могут представлять собой алюминиевые листы, соответственно, алюминиевые фольги и/или волокнистые материалы, в частности волокнистые маты. В принципе, захватываемые заготовки могут представлять собой структурные конструктивные элементы, в частности структурные конструктивные элементы самолета, или полуфабрикаты для таких структурных конструктивных элементов.
В одном из усовершенствований изобретения по п.2 формулы изобретения предлагается, чтобы Бернуллиевская область пониженного давления была полностью расположена в вакуумной области пониженного давления, и/или чтобы вакуумная область пониженного давления была полностью расположена в Бернуллиевской области пониженного давления.
Предпочтительно захватный узел Бернулли по меньшей мере частично, предпочтительно полностью расположен в вакуумном захватном узле (п.3 формулы изобретения). Также предпочтительно захватный узел Бернулли по меньшей мере частично, предпочтительно полностью расположен во всасывающей камере. Это делает возможным особенно компактный дизайн и одновременно большую вакуумную область пониженного давления.
По п.4 формулы изобретения захватный узел Бернулли допускает плавающее удерживание плоскостной заготовки с некоторой степенью свободы движения заготовки вдоль поверхности заготовки. Благодаря этому возможно выравнивание, в частности при обработке заготовки с помощью концевого эффектора. В отличие от этого, вакуумный захватный узел допускает неподвижное удерживание заготовки без степени свободы движения вдоль поверхности заготовки.
По п.5 формулы изобретения захватное устройство имеет Бернуллиевский рабочий режим, в котором заготовка удерживается захватным узлом Бернулли. Далее, предусмотрен вакуумный рабочий режим, в котором заготовка при необходимости удерживается вакуумным захватным узлом. Помимо этого, захватное устройство может, в принципе, иметь комбинированный рабочий режим, в котором заготовка удерживается захватным узлом Бернулли и вакуумным захватным узлом.
В пп.7-9 формулы изобретения описаны предпочтительные конструктивные варианты осуществления вакуумного захватного узла и захватного узла Бернулли.
В одном из усовершенствований по п.10 формулы изобретения предлагается, чтобы захватное устройство образовывало предварительно смонтированный узел и могло монтироваться на концевом эффекторе в виде единого узла. Благодаря этому возможна особенно простая замена захватного устройства на концевом эффекторе.
Вышеназванная задача решается также с помощью концевого эффектора с признаками п.11 формулы изобретения.
Получаются те же преимущества, что и выше в связи с захватным устройством. Поэтому можно сослаться на вышестоящие рассуждения.
Здесь и предпочтительно концевой эффектор имеет по меньшей мере два захватных устройства. При этом по первой альтернативе п.12 формулы изобретения вышеописанным образом может быть выполнена только часть захватного устройства. По второй альтернативе п.12 формулы изобретения вышеописанным образом могут быть также выполнены все захватные устройства.
Кроме того, вышеназванная задача решается с помощью манипулятора с признаком п.13 формулы изобретения. Манипулятор оснащен здесь по меньшей мере тремя осями, которые служат для позиционирования вышеназванного концевого эффектора.
Получаются те же преимущества, что и выше в связи с захватным устройством и/или в связи с концевым эффектором.
Предпочтительно манипулятор по п.14 формулы изобретения имеет включаемое клапанное устройство для присоединения, в частности пневматического, захватного устройства, соответственно, по меньшей мере одного из захватных устройств к источнику снабжения, в частности пневматическому. При этом источник снабжения может представлять собой, в частности, источник давления и/или источник пониженного давления. Здесь и предпочтительно несколько захватных устройств посредством клапанного устройства могут группой присоединяться и/или присоединены к источнику снабжения.
Далее изобретение поясняется подробнее с помощью чертежей, изображающих только примеры осуществления. На чертежах показано:
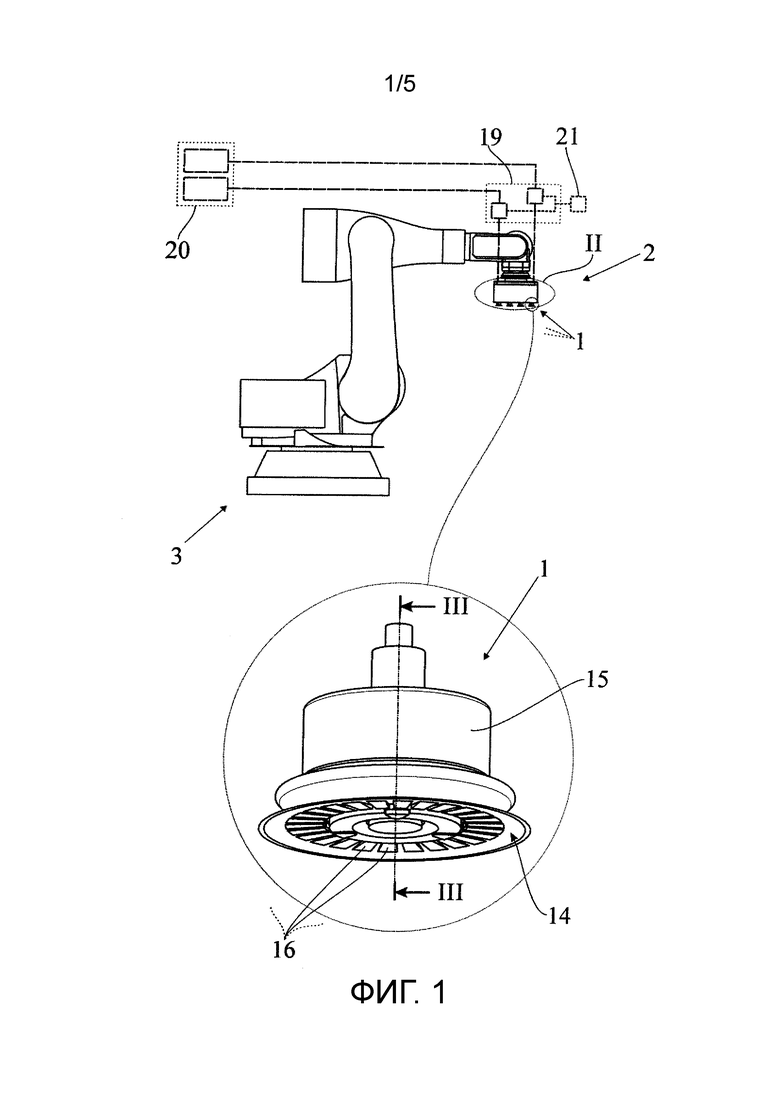
фиг.1: предлагаемое захватное устройство для предлагаемого концевого эффектора на предлагаемом манипуляторе;
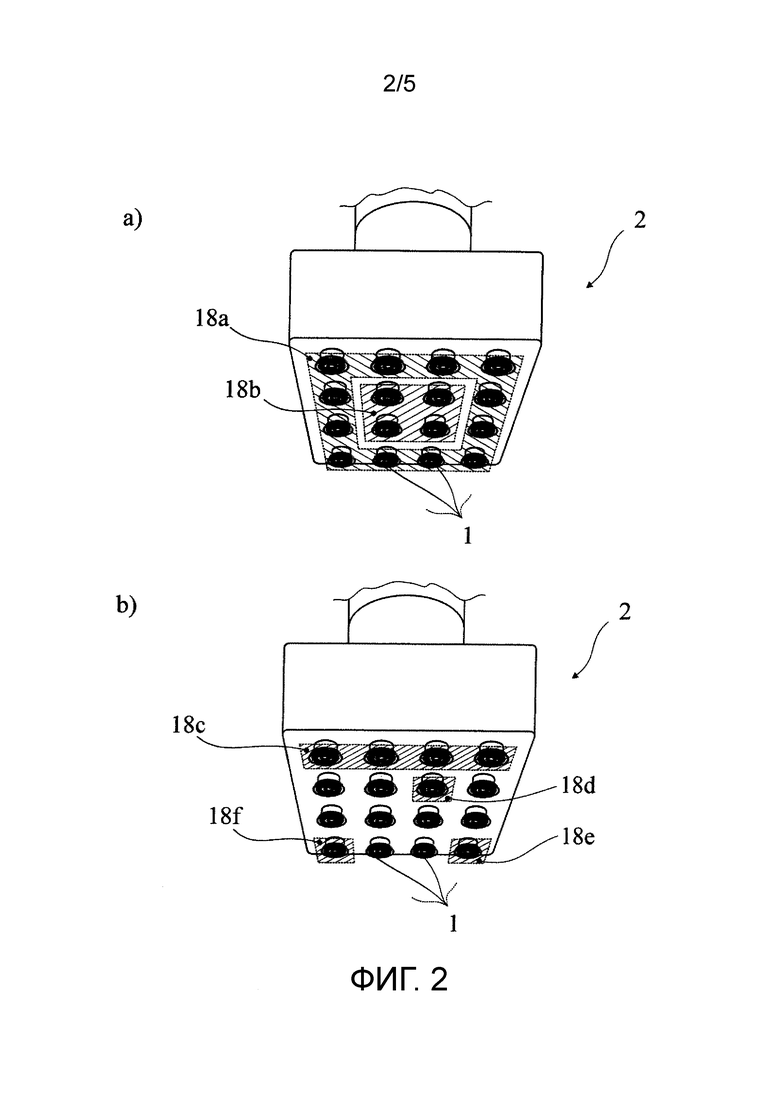
фиг.2: предлагаемый концевой эффектор, имеющий несколько предлагаемых захватных устройств, причем эти захватные устройства на a) и на b) объединены в различные группы;
фиг.3: сечение первого примера осуществления предлагаемого захватного устройства в соответствии с видом III с фиг.1;
фиг.4: предлагаемое захватное устройство в Бернуллиевском рабочем режиме;
фиг.5: предлагаемое захватное устройство в вакуумном рабочем режиме.
На фиг.1 показано захватное устройство 1 для концевого эффектора 2 манипулятора 3 для манипулирования заготовкой 4 по поверхности 5 этой заготовки.
С помощью предлагаемого захватного устройства 1 можно, в принципе, манипулировать любой заготовкой 4, которая по своей поверхности 5 может захватываться посредством статического пониженного давления. Заготовка 4 может представлять собой любую заготовку, которая располагает соответствующей поверхностью 5 заготовки.
С помощью захватного устройства 1 могут удерживаться заготовки 4, имеющие устойчивую форму или же не держащие форму. Эти не держащие форму материалы могут, в частности, представлять собой алюминиевые листы, соответственно, алюминиевые фольги и/или волокнистые материалы, в частности волокнистые маты. Волокнистые материалы могут представлять собой сухие волокнистые материалы и/или предимпрегнированные волокнистые материалы.
В соответствии с предложением, захватное устройство 1 имеет захватный узел 6 Бернулли. Этот захватный узел 6 Бернулли имеет выпускной узел 7 для вывода потока из захватного узла 6 Бернулли между захватным устройством 1 и поверхностью 5 заготовки таким образом, чтобы этим потоком в некоторой области - Бернуллиевской области 8 пониженного давления - по поверхности 5 заготовки могло создаваться статическое пониженное давление для удерживания заготовки 4. Поток имеет дополнительно к статической составляющей давления динамическую составляющую давления. В этой связи ссылаемся на уравнение Бернулли.
Далее, предлагаемое захватное устройство 1 имеет вакуумный захватный узел 9. Он включает в себя всасывающую камеру 10. С помощью всасывающей камеры 10 в ограниченной всасывающей камерой 10 области по поверхности 5 заготовки - вакуумная область 11 пониженного давления - может создаваться статическое пониженное давление для удерживания заготовки 4. Предпочтительно при удерживании с помощью вакуумного захватного узла 9 во всасывающей камере 10 по существу не возникает поток.
При использовании термина «вакуум» здесь имеется в виду давление, более низкое по сравнению с давлением окружающей среды. Это касается, в частности, терминов «вакуумный захватный узел», «вакуумная область пониженного давления» и «вакуумный рабочий режим».
Здесь и предпочтительно при удерживании заготовки 4 всасывающая камера 10 образует с заготовкой 4 по существу закрытое пространство. Благодаря этому только для приема заготовки 4 во всасывающей камере 10 должно создаваться пониженное давление, которое затем должно только поддерживаться для удерживания заготовки 4. Это делает возможным особенно низкий расход энергии для удерживания заготовки 4. Поэтому область между заготовкой 4 и захватным устройством 1 при удерживании заготовки 4 с помощью вакуумного захватного узла 9 по существу не имеет потока. При удерживании заготовки 4 с помощью вакуумного захватного узла 9 в захватном устройстве 1, в частности во всасывающей камере 10, как уже пояснялось выше, устанавливается по существу состояние статического давления.
В противоположность этому для удерживания заготовки 4 с помощью захватного узла 6 Бернулли непрерывно создается поток по меньшей мере в одной отдельной области между захватным устройством 1 и заготовкой 4.
Для создания особенно компактного, надежно удерживающего заготовку 4 и гибко применяемого захватного устройства 1 Бернуллиевская область 8 пониженного давления и вакуумная область 11 пониженного давления по меньшей мере частично пересекаются, как изображено на чертеже. Альтернативно и не изображенным здесь образом может быть также предусмотрено, чтобы Бернуллиевская область 8 пониженного давления и вакуумная область 11 пониженного давления окружали друг друга. В том и другом случаях захватное устройство 1 может применяться чрезвычайно гибко для заготовок 4 различного размера.
В показанном на чертеже примере осуществления Бернуллиевская область 8 пониженного давления полностью расположена в вакуумной области 11 пониженного давления. Но альтернативно может быть также предусмотрено, чтобы вакуумная область 11 пониженного давления была расположена в Бернуллиевской области 8 пониженного давления.
В том случае, когда Бернуллиевская область 8 пониженного давления и вакуумная область 11 пониженного давления окружают друг друга, Бернуллиевская область 8 пониженного давления и вакуумная область 11 пониженного давления отделены друг от друга. Особенно предпочтительно Бернуллиевская область 8 пониженного давления и вакуумная область 11 пониженного давления в этом случае непосредственно примыкают друг к другу и отделяются друг от друга, в частности, барьером, например, упругим стеновым элементом.
Как показано на фиг.3-5, захватный узел 6 Бернулли частично, здесь и предпочтительно полностью, расположен в вакуумном захватном узле 9. При этом захватный узел 6 Бернулли может по меньшей мере частично, здесь и предпочтительно полностью быть расположен во всасывающей камере 10. Однако в одном из альтернативных вариантов осуществления может быть также предусмотрено, чтобы вакуумный захватный узел 9 по меньшей мере частично, предпочтительно полностью, был расположен в захватном узле 6 Бернулли.
Захватный узел 6 Бернулли, в принципе, делает возможным плавающее удерживание плоскостной заготовки 4, так что заготовка 4 может смещаться относительно захватного устройства 1 вдоль поверхности 5 заготовки, в частности почти без трения. При этом поток, делающий возможным удерживание заготовки 4 с помощью захватного узла 6 Бернулли, образует воздушную подушку, на которой может соответственно перемещаться заготовка 4.
Вакуумный захватный узел 9 допускает, в отличие от этого, неподвижное удерживание заготовки 4 без степени свободы движения заготовки 4 вдоль поверхности 5 заготовки. При этом заготовка 4 не может перемещаться относительно вакуумного захватного узла 9. Поэтому с помощью захватного узла 6 Бернулли может создаваться своего рода скользящая опора, в то вакуумным захватным узлом 9 может образовываться своего рода неподвижная опора для заготовки 4.
Предпочтительно захватное устройство 1 имеет Бернуллиевский рабочий режим, в котором заготовка 4 удерживается захватным узлом 6 Бернулли, и/или вакуумный рабочий режим, в котором заготовка 4 удерживается вакуумным захватным узлом 9. Дополнительно или альтернативно захватное устройство 1 может иметь комбинированный рабочий режим, в котором заготовка 4 удерживается захватным узлом 6 Бернулли и вакуумным захватным узлом 9. Также предпочтительно захватное устройство 1 в Бернуллиевском рабочем режиме преимущественно, в частности исключительно, удерживает заготовку 4 с помощью захватного узла 6 Бернулли, соответственно, в вакуумном рабочем режиме преимущественно, в частности исключительно с помощью вакуумного захватного узла 9.
Один из особенно предпочтительных с точки зрения гидродинамики и изображенных здесь вариантов осуществления касается по существу вращательно-симметричного относительно захватной оси 1a осуществления захватного узла 6 Бернулли и/или вакуумного захватного узла 9. Но в принципе, возможно также отклонение от этой вращательной симметрии.
Захватный узел 6 Бернулли имеет напорный трубопровод 12 для подачи сжатого воздуха к выпускному узлу 7. Как показано на фиг.4, сжатый воздух течет по напорному трубопроводу 12 в выпускной узел 7 и выводится из него радиально относительно захватной оси 1a. Для этого выпускной узел 7 здесь и предпочтительно имеет множество отверстий 7a, которые распределены вокруг захватной оси 1a. Предпочтительно средние оси отверстий 7a проходят по существу параллельно поверхности 5 заготовки. Однако альтернативно они могут быть также наклонены относительно поверхности 5 заготовки под углом до 30°. Как изображено на фиг.4, здесь и предпочтительно между поверхностью 5 заготовки и захватным устройством 1, здесь захватным узлом 6 Бернулли, образуется воздушная подушка, которая образуется потоком, создающим также пониженное давление для удерживания заготовки 4. Заготовка 4 удерживается захватным узлом 6 Бернулли, как указано выше, по существу без соприкосновения.
Только чтобы гарантировать, что между поверхностью 5 заготовки и захватным устройством 1 в Бернуллиевском рабочем режиме всегда будет оставаться зазор, захватный узел 6 Бернулли имеет ряд опорных элементов 13. При этом заготовка 4 может надежно удерживаться в Бернуллиевском рабочем режиме, даже когда на заготовке 4 возникают, например, нежелательные механические колебания.
Вакуумный захватный узел 9 имеет, как упомянуто выше, всасывающую камеру 10. Всасывающая камера 10 впадает (оканчивается) во всасывающее отверстие 14, которое в вакуумном рабочем режиме находится в контакте с поверхностью 5 заготовки и ограничивает вакуумную область 11 пониженного давления. Удерживающая сила для удерживания заготовки 4 создается путем подачи пониженного давления к всасывающей камере 10. Для этого она может с помощью трубопровода 17 пониженного давления присоединяться к источнику пониженного давления, в частности насосу, работающему на всасывание. Функция источника пониженного давления может также выполняться системой Вентури, если имеется только подключение сжатого воздуха.
Всасывающая камера здесь и предпочтительно образуется сильфонным всасывающим элементом 15, предпочтительно всасывающим элементом в виде сильфона-гармошки. В сильфонном всасывающем элементе 15 здесь и предпочтительно расположен усилительный элемент 15c, в частности из полимерного материала и/или металла. Как показано на фиг.5, этот сильфонный всасывающий элемент 15, пружиня, установлен на остальной части захватного устройства 1, в частности собственным пружинящим участком 15a. Помимо этого, сильфонный всасывающий элемент 15 имеет пружинящий участок 15b в области всасывающего отверстия 14 для пружинящего прилегания к заготовке 4.
Сильфонный всасывающий элемент 15 может быть выполнен в виде одной части, в частности цельно, как показано на фиг.3-5. В принципе, возможен также вариант осуществления из нескольких частей. Сильфонный всасывающий элемент 15 может, в частности, иметь две или три части сильфонного всасывающего элемента, которые при известных условиях отличаются свойствами своего материала.
Как можно видеть на фиг.1, здесь во всасывающем отверстии 14 предусмотрены опорные участки 16 для опирания и прилегания к заготовке 4. Они выполнены также предпочтительно на сильфонном всасывающем элементе 15. С их помощью достигается устойчивое опирание поверхности 5 заготовки в вакуумном рабочем режиме.
Далее, вакуумный захватный узел 9 имеет трубопровод 17 пониженного давления для подачи пониженного давления во всасывающую камеру 10. Здесь средние оси трубопровода 17 пониженного давления и напорного трубопровода 12 по меньшей мере на отдельных участках проходят коаксиально друг другу. Особенно предпочтительно, когда трубопровод 17 пониженного давления помещен в напорный трубопровод 12, и/или, когда напорный трубопровод 12 помещен в трубопровод 17 пониженного давления, как это показано в этом примере осуществления. Такое исполнение делает возможным в высшей степени простое присоединение захватного устройства 1 к концевому эффектору 2. Но альтернативно напорный трубопровод 12 и трубопровод 17 пониженного давления могут быть также выполнены отдельно друг от друга.
Здесь и предпочтительно захватное устройство 1 выполнено в виде предварительно смонтированного узла, который в виде узла может монтироваться на концевом эффекторе 2. В том случае, когда трубопровод 17 пониженного давления помещен в напорный трубопровод 12, соответственно, напорный трубопровод 12 в трубопровод 17 пониженного давления, такой монтаж особенно просто возможен с помощью винтового соединения. Предпочтительно захватное устройство 1 соединяется с концевым эффектором 2 с силовым и/или с геометрическим замыканием, так что возможна простая замена неисправного захватного устройства 1.
Как показано на фиг.1 и 2, на предлагаемом концевом эффекторе 2 для манипулятора 3 предусмотрено по меньшей мере одно предлагаемое захватное устройство 1. Предпочтительно концевой эффектор 2 имеет по меньшей мере два захватных устройства 1, при этом по меньшей мере одно захватное устройство 1 или только часть захватных устройств 1 выполнена в соответствии с предложением, или при этом, как в этом примере осуществления, все захватные устройства 1 выполнены в соответствии с предложением.
Здесь и предпочтительно несколько захватных устройств 1 образуют вместе захватную область, по которой данная удерживающая сила может передаваться на поверхность 5 заготовки. В зависимости от активирования захватных устройств 1 могут реализовываться различные захватные области из отдельных частей 18a-f захватных областей. В качестве примера на фиг.2a и 2b заштрихованными поверхностями обозначены различные захватные области. На фиг.2a показана возможность реализации наружной части 18a захватной области и внутренней части 18b захватной области. На фиг.2b показано, что имеющиеся там части 18c, 18d, 18e, 18f захватной области могут до определенной степени индивидуально адаптироваться к данному случаю применения, когда соответственно активируются захватные устройства 1.
Манипулятор 3, в частности концевой эффектор 2, имеет здесь и предпочтительно включаемое клапанное устройство 19 для активирования захватных устройств, то есть для присоединения захватного устройства 1, соответственно, одного из захватных устройств 1 к источнику 20 снабжения. Предпочтительно клапанное устройство 19 имеет несколько клапанов. Клапанное устройство 19 укомплектовано соответствующим электронным управлением 21.
Предпочтительно при приеме и/или складывании заготовки 4 захватное устройство 1, соответственно, захватные устройства 1 эксплуатируются в вакуумном рабочем режиме. Между приемом и складыванием для позиционирования заготовки 4 относительно концевого эффектора 2 и/или для придания формы заготовке 4 на концевом эффекторе 2 одно захватное устройство 1 может или, соответственно, несколько захватных устройств 1 могут переключаться в Бернуллиевский рабочий режим. Предпочтительно при этом одно и/или два захватных устройства 1 остаются в вакуумном рабочем режиме, однако могут также переключаться все захватные устройства 1.
Наконец, при складывании для отсоединения заготовки 4 от концевого эффектора 2 с помощью захватных узлов Бернулли может создаваться импульс сжатого воздуха.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНЦЕВОГО ЭФФЕКТОРА | 2017 |
|
RU2762436C2 |
| Система манипулирования с вакуумным захватным устройством | 2023 |
|
RU2813610C1 |
| УЗЕЛ ЗАХВАТНОГО УСТРОЙСТВА И СПОСОБ ДЛЯ ЗАХВАТА КОМПОНЕНТА ШИНЫ | 2016 |
|
RU2699106C2 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Захватное устройство | 1984 |
|
SU1237423A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ЗАХВАТА И СБОРКИ ЗАГОТОВОК КАРТОННЫХ КОРОБОК | 1995 |
|
RU2136503C1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО ПОДВОДНЫХ АППАРАТОВ | 2000 |
|
RU2211783C2 |
| Вакуумное захватное устройство | 1984 |
|
SU1215999A1 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ИСПОЛНИТЕЛЬНЫМ УСТРОЙСТВОМ НА ДИСТАЛЬНОМ КОНЦЕ | 2007 |
|
RU2478347C2 |



Изобретение относится к области машиностроения и может быть использовано в манипуляторах. Захватное устройство для концевого эффектора (2) манипулятора (3) для удерживания заготовки (4) имеет захватный узел (6) Бернулли с выпускным узлом (7). Узел (7) предназначен для вывода потока (SB) из захватного узла (6) Бернулли между захватным устройством (1) и поверхностью (5) заготовки. При этом обеспечивается создание статического пониженного давления для удерживания заготовки (4). Предусмотрен вакуумный захватный узел (9) со всасывающей камерой (10). В ограниченной всасывающей камерой (10) области - вакуумной области (11) пониженного давления – обеспечивается создания статического пониженного давления для удерживания заготовки (4). Бернуллиевская область (8) пониженного давления и вакуумная область (11) пониженного давления могут по меньшей мере частично пересекаться или окружать друг друга. В результате обеспечивается надежный захват заготовок различных размеров. 3 н. и 12 з.п. ф-лы, 5 ил.
1. Захватное устройство для концевого эффектора (2) манипулятора (3) для удерживания заготовки (4) по поверхности (5) заготовки,
имеющее захватный узел (6) Бернулли с выпускным узлом (7) для вывода потока (SB) из захватного узла (6) Бернулли между захватным устройством (1) и поверхностью (5) заготовки таким образом, что потоком (SB) в ограниченной области - Бернуллиевской области (8) пониженного давления - может создаваться статическое пониженное давление для удерживания заготовки (4),
и имеющее вакуумный захватный узел (9) со всасывающей камерой (10), при этом в ограниченной всасывающей камерой (10) области - вакуумной области (11) пониженного давления - может создаваться статическое пониженное давление для удерживания заготовки (4), причем эта всасывающая камера (10) образована сильфонным всасывающим элементом (15),
причем Бернуллиевская область (8) пониженного давления и вакуумная область (11) пониженного давления по меньшей мере частично пересекаются, или причем Бернуллиевская область (8) пониженного давления и вакуумная область (11) пониженного давления окружают друг друга,
причем вакуумный захватный узел (9) имеет трубопровод (17) пониженного давления для подачи пониженного давления (17) к всасывающей камере (10), а захватный узел (6) Бернулли имеет напорный трубопровод (12) для подачи сжатого воздуха к выпускному узлу (7),
причем средние оси трубопровода (17) пониженного давления и напорного трубопровода (12) по меньшей мере на отдельных участках проходят коаксиально.
2. Захватное устройство по п. 1, отличающееся тем, что Бернуллиевская область (8) пониженного давления полностью расположена в вакуумной области (11) пониженного давления, и/или что вакуумная область (11) пониженного давления полностью расположена в Бернуллиевской области (8) пониженного давления.
3. Захватное устройство по п. 1 или 2, отличающееся тем, что захватный узел (6) Бернулли по меньшей мере частично, предпочтительно полностью, расположен в вакуумном захватном узле (9), предпочтительно, что захватный узел (6) Бернулли по меньшей мере частично, предпочтительно полностью, расположен во всасывающей камере (10).
4. Захватное устройство по одному из пп. 1-3, отличающееся тем, что захватный узел (6) Бернулли допускает плавающее удерживание заготовки (4) с возможностью движения заготовки (4) вдоль поверхности (5) заготовки и/или вакуумный захватный узел (9) допускает неподвижное удерживание заготовки (4) без возможности движения вдоль поверхности (5) заготовки.
5. Захватное устройство по одному из пп. 1-4, отличающееся тем, что захватное устройство (1) имеет Бернуллиевский рабочий режим, в котором заготовка (4) удерживается захватным узлом (6) Бернулли, и/или захватное устройство (1) имеет вакуумный рабочий режим, в котором заготовка (4) удерживается вакуумным захватным узлом (9), и/или захватное устройство (1) имеет комбинированный рабочий режим, в котором заготовка (4) удерживается захватным узлом (6) Бернулли и вакуумным захватным узлом (9).
6. Захватное устройство по одному из пп. 1-5, отличающееся тем, что всасывающая камера (10) оканчивается во всасывающем отверстии (14), которое предоставляет вакуумную область (11) пониженного давления.
7. Захватное устройство по одному из пп. 1-6, отличающееся тем, что всасывающая камера (10) образована всасывающим элементом в виде сильфона-гармошки.
8. Захватное устройство по одному из пп. 1-7, отличающееся тем, что сильфонный всасывающий элемент (15) установлен на остальной части захватного устройства (1), в частности пружиня собственным пружинящим участком (15a), и/или сильфонный всасывающий элемент (15) имеет пружинящий участок (15b) в области всасывающего отверстия (14) для пружинящего прилегания к заготовке (4).
9. Захватное устройство по одному из пп. 1-8, отличающееся тем, что трубопровод (17) пониженного давления помещен в напорный трубопровод (12) и/или напорный трубопровод (12) помещен в трубопровод (17) пониженного давления.
10. Захватное устройство по одному из пп. 1-9, отличающееся тем, что захватное устройство (1) выполнено в виде предварительно смонтированного узла и может в виде узла монтироваться на концевом эффекторе (2).
11. Концевой эффектор для манипулятора (3), имеющий по меньшей мере одно захватное устройство (1) по одному из пп. 1-10.
12. Концевой эффектор по п. 11, отличающийся тем, что предусмотрены по меньшей мере два захватных устройства (1), и только часть захватных устройств (1) выполнена по одному из пп. 1-10, или все захватные устройства (1) выполнены по одному из пп. 1-10.
13. Концевой эффектор по п. 11 или 12, отличающийся тем, что по меньшей мере в наружной области всей захватной поверхности (18), в частности, в угловой области всей захватной поверхности (18), предпочтительно в по меньшей мере двух угловых областях всей захватной поверхности (18) расположено захватное устройство (1) по одному из пп. 1-10.
14. Манипулятор, в частности робот, имеющий по меньшей мере три оси, имеющий концевой эффектор (2) по одному из пп. 11-13.
15. Манипулятор по п. 14, отличающийся тем, что этот манипулятор (3) имеет включаемое клапанное устройство (19) для в частности пневматического присоединения захватного устройства (1), соответственно, по меньшей мере одного из захватных устройств (1) к в частности пневматическому источнику (20) снабжения, в частности к источнику давления и/или источнику пониженного давления, предпочтительно, что несколько захватных устройств (1) выполнены с возможностью подключения в виде одной группы посредством клапанного устройства (19) к источнику (20) снабжения.
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕНОСА ТОНКИХ ПОЛУПРОВОДНИКОВЫХ ПЛАСТИН | 0 |
|
SU257628A1 |
| ЗАХВАТ, В ЧАСТНОСТИ ЗАХВАТ БЕРНУЛЛИ | 2008 |
|
RU2466857C2 |
| Схват | 1983 |
|
SU1087328A1 |
| US 4566726 A, 28.06.1986. | |||

