Изобретение относится к машииострое;чию и может быть использовано для автол1атизации и комплексной механизации нроцессов изготовления резиновой обуви и других изделий из нластических материа.юв, -шпример бумаги, кожи, материи и т. д.
Известен манипулятор, содержащий ме ;анизм поворота вокруг вертикальной оси, механическую руку с вакуумным схватом 1
Недостатком известного манипулятора является сложность копструк1дии и низкая надежность работы.
Целью изобретения является у прощение конструкции и ювышение надежности работы.
Цель достигается тем, что в манипуляторе содержащем механизм 1говорота вокруг вертикальной оси, механическую руку с вакуум}1ым схватом, ехват вынолнеь; в виде парнирно закрепленного на механической руке полого цилиндрического сегмента, lioлость которого разделена па камеры, нричем на цилиндрической поверхности сегмента выполнены отверстия, а ось Н1арнира совпадает с осью цилиндрической образуюпюй сегмента.
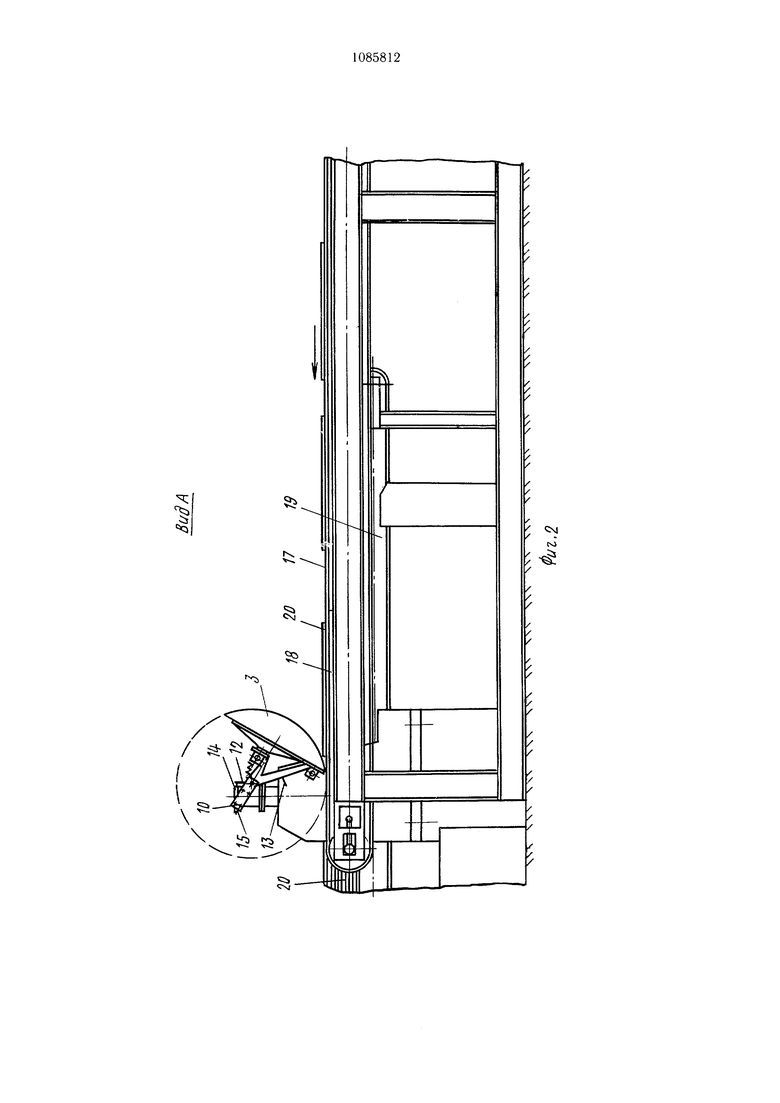
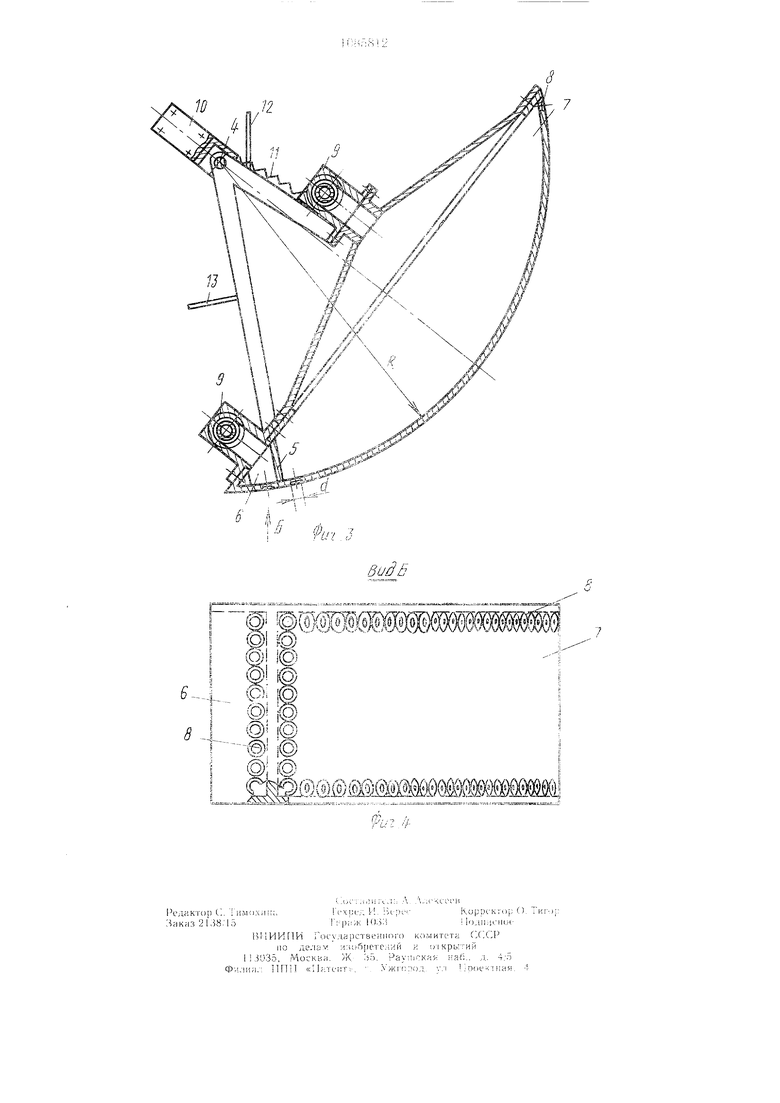
На фиг. схематически изображен пре;;.ложенный манипулятор с технологическим оборудованием, вид в плане; на фиг. 2 вид А на фиг, I; на фиг. 3 вакуумный схват в разрезе; на (|)иг. 15 на
фиг. 3.
Устройство содер.ж.ит механизм гюворота I вокруг вертикальной оси. сое.аи 101-:.чь|й с механической р-укой 2, снабженной вакуумным схватом 3, который пр-и 1на)нира 4 соел.и;чен с р-укой 2. 3 (фи|-. 3) выполнен в виде по:;ого цклиндрического сегмента, nojiOcTb которог.) Jaздe. перегородкой 5 на 6 и верхнюю 7 кам рьг На пи; индрической по1ип)хности (хвата 3 вьпюлпепы отверсткя 8, liiur-ieM огнон:ение радиуса основании (К; к лиа.метру (d) отверстий 8 составляет ite более 4 - 25 (определено эвристиче; ки ) К;. камера 6 и 7 сое;1инена с эжекторам;; 9. Шарнир J ycraHOBjiCii я крони1т(йпе К). с -;и:-;аг:ноу с пружиной 1L На схваге 3 ризмеп1, viiofii, 12 и 13 взаимодействую : lie с юложения 14 и 15, ус: . па |vv ке 2. Работа всех узлоз осу 1иеств. б.л(жом рО раммь О Ч) vnp,.пения 16. Техноло -ическое оборудование СОСТОЙ : 13 fiei pepbiB :o двп/;(у дейся ле). 17 тра С1 Ортера, которая ;.; :ione захвата скользит над ог орным столом 18, и i:5 iaкопи1ч.я 19. на которо.м ,:оже ы счопки из изделий 20, выполненных из тонколисlOBOio ;-}..: астичного материала, в данном случае резины.
Манину; я ор работает следую дим образом.
Не 7-очно ориентированные 20 1 еремег1.аются на ленте 17 транспортера в захвата. От блока .много управ. 16 поступает ко.мапда механиз.м вертикального еремещения (не показан) руки 2 ма - ипулятора. Рука 2 0 ускается между иереме цаюн1имися изделиями 20, при этом время 1икла манипулятора (опускание, захват изделия. , перенос на нако 1итель, возврап.ение в иеходное положение) мень1 ;е вре. пере:ие цения следующего изде.:кя 20 в зону захвата. Опущенная рука 2 г; схватом 3 располагается нижней ка.мерой (; яал, 17 транс ортера на расстоянии ia 0,1 мм толщины изделия 20, ))ое, ереме иаясь на ленте 17 между столом 18 и схватом 3, принуждает К)с;1едний вра цаться вокруг оси за счет между ними силь трения. При этом, как только схват 3 на инает вра цаться, упор 12 отходит от датчика 14, сигнал с которО Ч) поступает ia блок програ.ммного управ. 6, даюп1его команду на иодачу i эжектор 9 сжатого воздуха. Одновремеп() при ;ра 1ении схвата 3 отверстия 8 |(.Ч1екрываются изделием 20, и при этом в нижней камере 6 создается разряжение и край и:)де. 20 рИсЧИ ает к отверстиям 8 и « ;а орачинается на 1илиндрическую по icpx iot:T j сх)ата 3. При «наворачива} ии ; изде; ие 20 :и1крь вает все отверстия 8 в верхней ка.мере 7 и в {ей создается разряжение, в )езул1Лате изделие 20 олностью прил. к схват.;. В это вре.мя 13 взаимодейстЕич:- с да чиком 15, си Ч1а;| с .которо Ч) : оступает на блок 1 рограмм 1ого п ;ав:) 16. По сигналу блока 16 рука 2 поднимается, 1ружина 1 1 возврап1.ает схват ii сходпое оложение (нижняя камера 6 )мс1;олагается ), механизм 1 i OBOpola U)Kpyi- |)ертикальной оси перемеп1ает 2 со схватом 3 к накопителю 19. Здесь )ис:коди7 отключсннк юдачи сжатого воздуха ) эжекторы 9 и изделия 20 накапли(акпся :; стопки, которь е в е.1емс 1аются из зоны работы ма -:ипулятора. ука 2 ао: вра1 1ается в исхо;шое 1оложепие, : пи:чл овториется.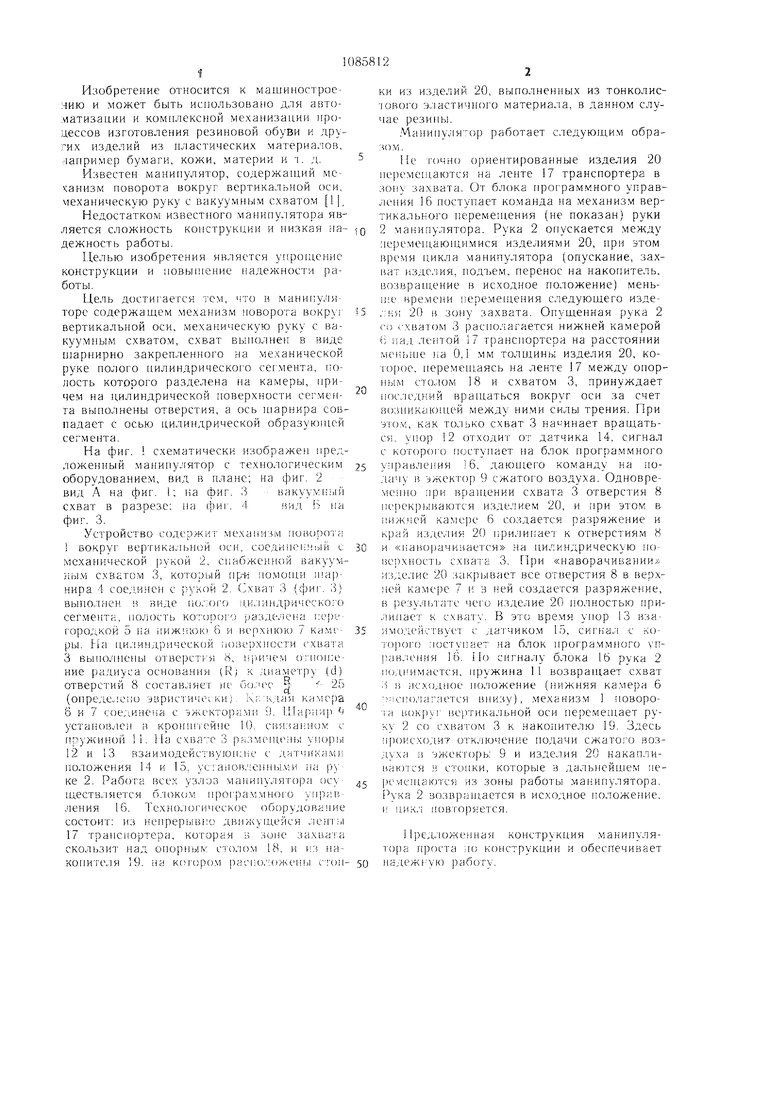
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Вакуумный манипулятор | 1985 |
|
SU1301602A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
| Манипулятор | 1989 |
|
SU1613318A1 |
| Вакуумное захватное устройство | 1981 |
|
SU1036657A1 |
| Схват промышленного робора | 1984 |
|
SU1237424A1 |
| Схват | 1983 |
|
SU1161378A1 |
| Пневмосистема привода | 1982 |
|
SU1116231A1 |
| Схват | 1982 |
|
SU1060469A1 |
| Манипулятор | 1980 |
|
SU975383A1 |
МАНИПУЛЯТОР, содержащий механизм поворота вокруг вертикальной оси, механическую руку с вакуумным схватом, отличающийся тем, что, с целью упрощения конструкции и повышения надежности работы, схват выполнен в виде щарнирно закрепленного на механической руке полого цилиндрического сегмента, полость которого разделена на камеры, причем на цилиндрической поверхности сегмента выполнены отверстия, а ось щарнира совпадает с осью цилиндрической образующей сегмента. 5S (Л
&
I
Ч c
Csj
CSJ
1 // о
, и/
S @ р
(О}| |@
0) р
@ Р
©и©
-@ I©
@1
. х5оЗ,51„„.,
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1974 |
|
SU542641A2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
