ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к летательному аппарату с несколькими крыльями, содержащему три или более двигателей, который снабжен свободным крылом, выполненным с возможностью свободного вращения вокруг своей продольной оси, тем самым обеспечивая летательному аппарату подъемную силу во время горизонтального полета.
УРОВЕНЬ ТЕХНИКИ
На протяжении последних лет в универсальной промышленности были достигнуты решения по разработке, производству и применению летательных аппаратов, выполненных с возможностью вертикального взлета и последующего горизонтального полета.Эти летательные аппараты могут быть пилотируемыми или непилотируемыми, а также могут иметь различные наименования, такие как летательный аппарат с СВВП (системой вертикального взлета и посадки), многовинтовой летательный аппарат, летательный аппарат с поворотным крылом и другие.Такие летательные аппараты характеризуются наличием нескольких двигателей (винтов или реактивных двигателей), которые обеспечивают возможность вертикального взлета и посадки летательного аппарата. Как только летательный аппарат оказывается в воздушном пространстве, ориентация двигателей может регулироваться для движения летательного аппарата вперед при горизонтальном полете. С целью внесения ясности, указанный летательный аппарат в настоящем документе именуется «многовинтовым летательным аппаратом». Многовинтовой летательный аппарат может взлетать, зависать и лететь горизонтально с помощью винтовых двигателей или реактивных двигателей.Управление и стабилизация летательного аппарата осуществляется с помощью датчиков и бортовогокомпьютера, которые управляют и передают команды двигателям и винтам летательного аппарата.
Одно преимущество многовинтовых летательных аппаратов заключается в возможностиих вертикального взлета и посадки, зависания в воздухе, и даже полета в горизонтальном направлении.
Один из недостатков многовинтовых летательных аппаратов заключается в относительно коротком времени, на протяжении которого они могут оставаться в воздушном пространстве. Данное ограничение объясняется тем фактом, что при горизонтальном полете летательного аппарата, некоторая часть энергии от двигателейтратится на его горизонтальное движение вперед. Таким образом, в некоторых моделях многовинтовых летательных аппаратов предусмотрены крылья, предназначенные для увеличения эффективности использования энергии при горизонтальном полете. В некоторых моделях многовинтовых летательных аппаратов, снабженных крыльями, двигатели неподвижно прикреплены ккрыльям, так что между ними образован фиксированный угол, и вращательное движение двигателей происходит одновременно с вращением крыла. В других моделях, крыло и двигатели неподвижны относительно шасси. Недостаток вышеуказанного летательного аппарата, в котором двигатели и крыло неподвижно соединены друг с другом, играет свою роль, как при взлете, так и при посадке, а также при зависании. Когда крылья вертикальны относительно земли (при этом двигатели обращены вверх, функционируя так, как в вертолете),а также в условиях ветра, имеет место сопротивление и неустойчивость. Подобным образом, в случае летательного аппарата, в котором как двигатели, так и крыло, неподвижно соединены с шасси, на крыле создается отрицательная подъемная сила и/или сопротивление во время взлета, зависании или посадки, как при попутном, так и при боковом ветре.
Это приводит к потерям энергии (требуя усиленной работы двигателей) или затратам, отклонению летательного аппарата от его вертикальной линии посадки или точки зависания. Данная проблема становится особенно критической, когда требуется посадка такого летательного аппарата на крышу здания, при которой боковой ветер в определенный момент посадки может отклонить летательный аппарат от его точки посадки.
Использование приводов и различных механических механизмов для стабилизации летательного аппарата снижает надежность ввиду добавления указанных компонентов, а если компоненты являются незаменимыми для полета, это становится серьезной опасностью. Кроме того, указанные механизмы являются тяжелыми и, следовательно, снижают максимальное время полета или грузоподъемность летательного аппарата. Следовательно, в настоящем изобретении к многовинтовому летательному аппарату прикреплены свободные крылья, выполненные с возможностью свободного движения на своем продольном валу. Указанными свободными крыльями может управлять привод или они могут быть неуправляемыми, при этом в данном случае образуемый ими угол и вырабатываемая подъемная сила являются результатом потока воздуха относительно них.
Таким образом, настоящим резюмируем проблему, существующую в различных моделях многовинтового летательного аппарата с крыльями: (a) в летательном аппарате, снабженном крылом, неподвижным относительно шасси: при горизонтальном полете крыло функционирует так, как и в обычном летательном аппарате.При зависании (во время которого летательный аппарат остается в местоположении над фиксированной точкой на земле) или при посадке (когда летательный аппарат расположен вертикально над фиксированной точкой на земле) и не в условиях ветра, проблем не возникает.
Однако при возникновении бокового ветра, порывов ветра или попутного ветра, летательный аппарат смещается из фиксированной точки, что представляет собой ранее упомянутую проблему. (b) В летательном аппарате, снабженном крылом, прикрепленным к двигателям, в котором двигатели вращаются совместно с крылом относительно шасси летательного аппарата: при горизонтальном полете летательный аппарат функционирует, как обычный самолет. Однако при зависании или посадке, двигатели направлены вверх, тогда как крылья направлены вертикально в сторону земли; таким образом, любое направление ветра приводит к смещению летательного аппарата из указанной фиксированной точки.
В дополнение, управление нарушениями не представляется возможным, поскольку перемещение самого крыла оказывает воздействие, создавая несостыковку корректировок двигателей и крыльев.
Перечень чертежей
Прилагаемые к заявке чертежи не предназначены для ограничения объема настоящего изобретения и его применения. Чертежи предназначены только лишь для иллюстрации настоящего изобретения, и они являются только лишь одним из множества возможных вариантов его реализации.
На фиг.1A изображен многовинтовой летательный аппарат в горизонтальном положении, а также векторы действующих на него сил.
На фиг. 1B изображен многовинтовой летательный аппарат, наклоненный вперед при горизонтальном полете вперед.
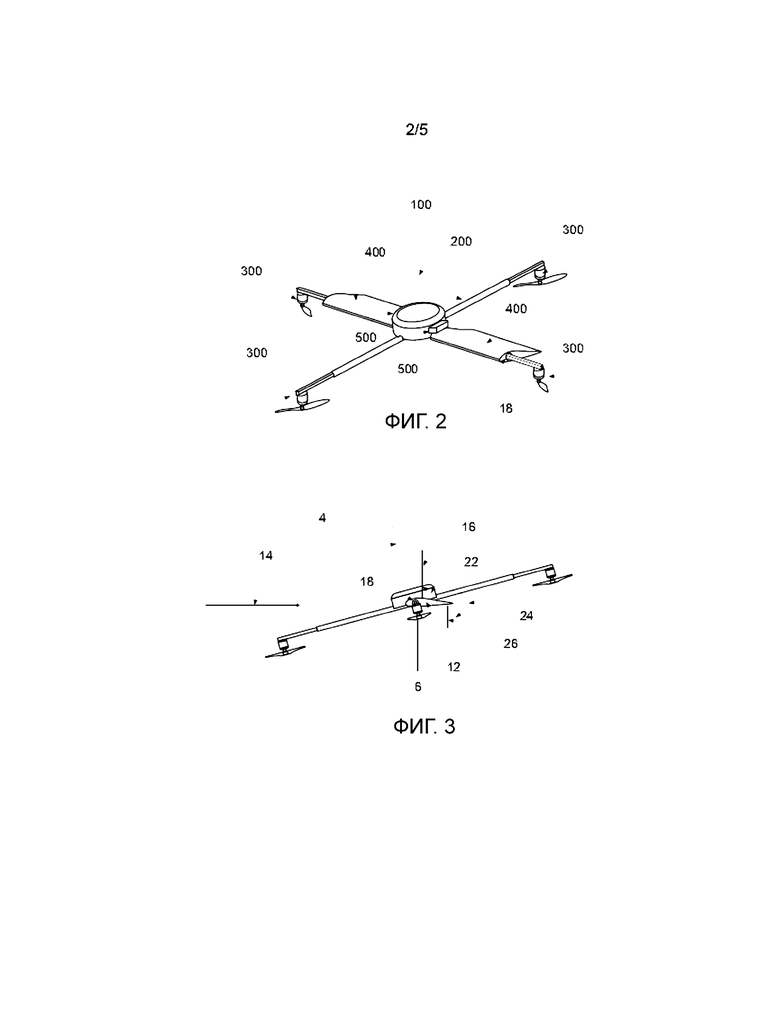
На фиг. 2 изображен многовинтовой летательный аппарат (100), содержащий пару свободных крыльев (400).
На фиг. 3 изображен многовинтовой летательный аппарат (100), содержащий свободные крылья (400), а также векторы сил, действующих на него при горизонтальном полете.
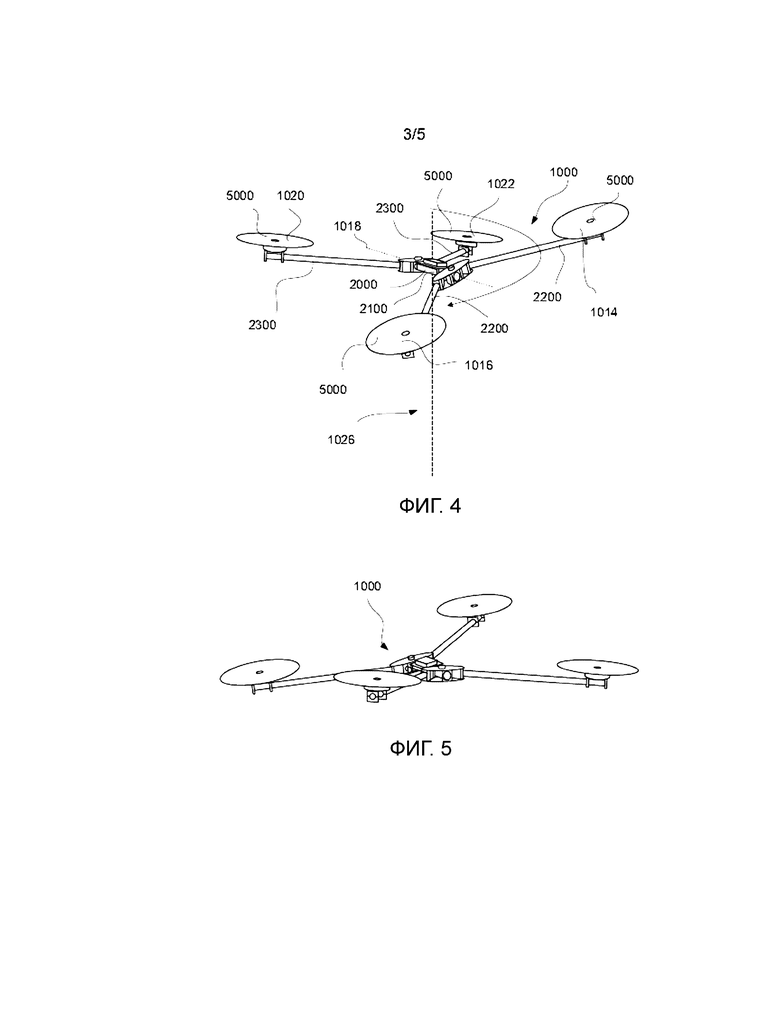
На фиг. 4 изображен мультикоптер(1000) с рысканием вправо.
На фиг. 5 изображен мультикоптер(1000) с рысканием влево.
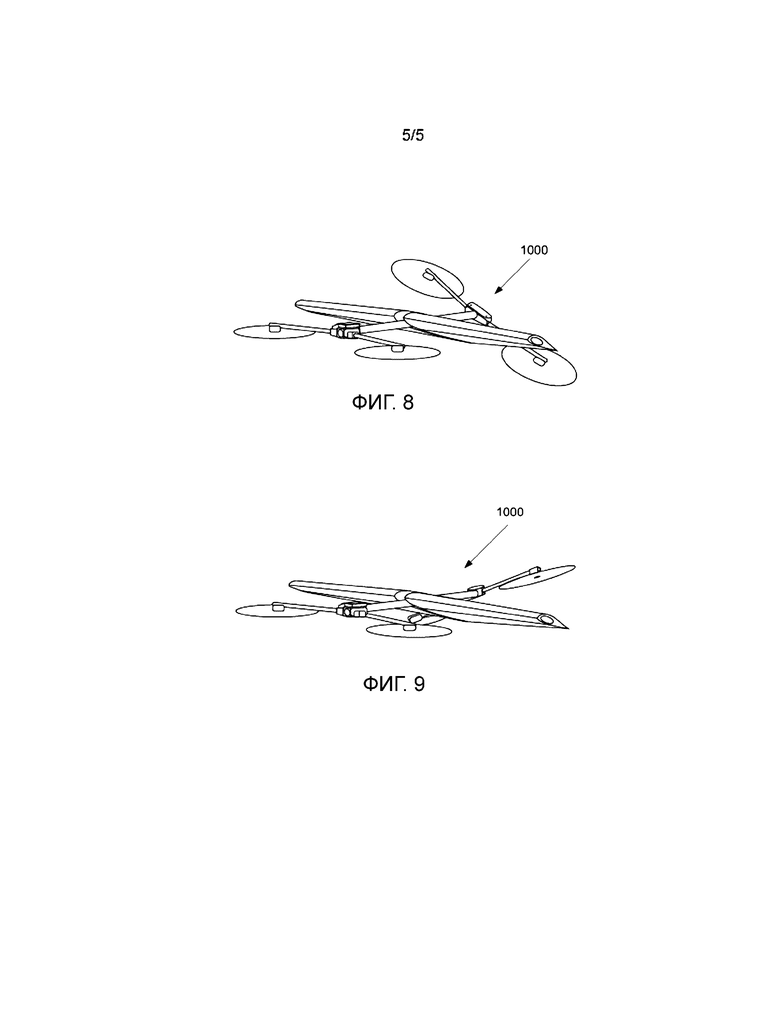
На фиг.6–9 изображен мультикоптер(1000), снабженный свободным крылом (4000).
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к многовинтовому летательному аппарату со свободным крылом, выполненному таким образом, что с одной стороны, крылья могут использоваться для улучшения эффективности полета и сохранения энергии, а с другой стороны, предотвращается проблема, существующая в многовинтовых летательных аппаратах, снабженных крыльями, прикрепленными к шасси или двигателям летательного аппарата.
Стабилизация и управление многовинтовым летательным аппаратом осуществляется автономно с помощью датчиков и бортового компьютера, которые управляют работой его двигателей и винтов.Таким образом, например, если пользователь желает, чтобы летательный аппарат летел вперед, задние двигатели получают команду на ускорение, а передние двигатели получают команду на замедление. Это создает момент вращения и наклонения летательного аппарата вперед, тогда как сила тяги толкает его в горизонтальном направлении. Поскольку для движения вперед требуется некоторая часть энергии, мощность двигателей должна быть увеличена для поддержания высоты полета летательного аппарата; таким образом, аппарат потребляет больше энергии в данном состоянии, как изображено на фиг. 1A и 1B. На фиг. 1A изображен многовинтовой аппарат (2), зависший в горизонтальном положении.Вектор (4) подъемной силы представляет собой суммарную силу, прикладываемую двигателями и винтами (5), а вектор (6) ускорения свободного падения представляет собой центр тяжести летательного аппарата (2).Когда величины этих двух сил равны, летательный аппарат (2) находится в состоянии равновесия, т.е. в зависшем состоянии,сохраняя высоту своего полета.
На чертеже 1B изображен летательный аппарат (2), наклоненный вперед при горизонтальном полете вперед (или против ветра), причем вектор (4) подъемной силы представляет собой результирующую силу, создаваемую действием двигателей и винтов (5), которая может быть разделена на составляющие, так что вектор (8) направленного вперед усилия представляет собой составляющую результирующей силы (4), обеспечивающую возможность движения вперед, а вектор (10) представляет собой составляющую результирующей силы, определяющую высоту полета летательного аппарата.
Можно увидеть, что вектор (10) меньше, чем вектор (4) и вектор (6); таким образом, в данном состоянии летательный аппарат будет терять высоту полета и снижаться. Для обеспечения возможности сохранения летательным аппаратом высоты своего полета, результирующая сила должна быть увеличена до тех пор, пока вектор (10) не станет равен вектору (6), т.е. общему весу летательного аппарата.В результате это даст равновесие, обеспечивая возможность сохранения летательным аппаратом высоты своего полета. Увеличение результирующей силы приведет к затратам энергии и сокращению времени полета.
Настоящее изобретение относится к многовинтовому летательному аппарату (100), содержащему шасси (200), три или более двигателей (300), а также свободное крыло (400) (или пару крыльев по обеим сторонам шасси), как изображено на фиг. 2 и 3. Свободное крыло(400) прикреплено к шасси (200) с помощью осевого соединения (18). Таким образом, угол между свободным крылом (400) и шасси (200) может быть изменен с помощью привода (500) или силой потока воздуха над крылом.
Для создания свободными крыльями (400) подъемной силы при полете с горизонтальной составляющей (далее – «горизонтальный полет»), они должны находиться под конкретным положительным углом наклона относительно направления (14) потока воздуха. Поскольку шасси (200) наклонено вперед в направлении потока воздуха, важно, чтобы свободное крыло (400) не было прикреплено к шасси без возможности снятия. В противном случае будет создаваться отрицательный угол, вызывая потери, как высоты полета, так и энергии.
Для размещения свободного крыла под конкретным положительным углом относительно потока воздуха могут быть использованы приводы, управляющие крылом, или управляемые с помощью компьютера двигатели, установленные на крыле. В качестве альтернативы, может быть использовано полностью свободное крыло (400), автоматически достигающее своего оптимального состояния относительно движения воздуха без вмешательства.Это представляется возможным благодаря конструкции крыла, однако в данном случае это будет менее эффективно для множества положений полета в части аэродинамики.
Свободное крыло (400) прикреплено к шасси (200) с помощью оси (18) с обеспечением возможности свободного вращения свободного крыла вокруг данной оси. Свободное крыло (400) автоматически стабилизируется против потока (14) воздуха (или оно стабилизируется управляемым компьютером приводом) с добавлением направленной вверх подъемной силы, которая обозначена вектором (16) и дополняет подъемную силу, создаваемую двигателями (300).
Свободное крыло, изображенное, например, на фиг. 3, может свободно вращаться вокруг оси (18). Вектор (16) представляет собой направленную вверх подъемную силу, создаваемую свободным крылом, центр которого расположен за осью (18), тем самым создавая момент (22), при котором задняя кромка крыла возвышается над осью (18). Поверхность управления, находящаяся на крыле, или наклон задней кромки крыла вверх, в результате дают направленную вниз силу (26), которая вызывает момент (24) в направлении, противоположном направленному вверх моменту (22), до достижения состояния равновесия, при котором крыло стабилизировано относительно потока воздуха, и вырабатывает подъемную силу. Для сохранения эффективности при зависании, летательный аппарат (100) должен располагаться против ветра, а при полете, крыло должно располагаться свободно относительно потока воздуха. Специально разработанное программное обеспечение, бортовой компьютер и датчики, установленные на летательном аппарате, используются для поддержания ориентации свободного крыла (400) во время горизонтального полета.
Из вышеуказанного, а также из чертежей, прилагаемых к настоящей заявке на патент, явным образом следует, что настоящее изобретение относится к многовинтовому летательному аппарату (100) с тремя или более винтами (300), неподвижно прикрепленными к шасси (200) летательного аппарата (100), так что угол между винтами (300) и шасси является фиксированным. Кроме того, летательный аппарат (100), в соответствии с настоящим изобретением, снабжен одним или более свободными крыльями (400), соединенными с шасси (200) с помощью оси (18), что обеспечивает возможность изменения угла между крылом (400) и шасси (200) летательного аппарата (100). Угол наклона крыла (400) может быть изменен с помощью привода (500), который может представлять собой мотор, винт или любое другое средство для вращения крыла.В качестве альтернативы, поскольку свободное крыло (400) прикреплено с возможностью свободного вращения, его угол наклона может меняться в зависимости от потока воздуха в сторону свободного крыла (400) и над ним.
Таким образом, во время горизонтального полета, горизонтальный поток воздуха, окружающий крыло, регулирует угол наклона крыла таким образом, что вектор подъемной силы крыла (400) направлен вверх. Это увеличивает подъемную силу летательного аппарата (100) и уменьшает количество энергии, требуемой для работы винтов (300). Настоящее изобретение может быть осуществлено в других вариантах реализации летательного аппарата (100) путем добавления двух свободных крыльев (400). Кроме того, осевое соединение (18) крыльев (400) с шасси (200) может быть таким, что крылья могут бесконечновращаться на 360 градусов.
Когда летательный аппарат (100), например, зависает, выполняет взлет или посадку при боковом ветре, летательный аппарат (100) будет наклоняться вбок в сторону ветра так, что он остается выше точки на земле, а ветер будет вращаться до достижения летательным аппаратом положения, в котором передняя кромка крыла (400) обращена к ветру, тем самым существенно уменьшая сопротивление, а также степень, до которой летательный аппарат (100) смещается от предполагаемой точки на земле, над которой он должен находиться. Как показано на чертежах и в качестве разъяснения, каждая сторона крыла (левая и правая) может независимо вращаться, что делает возможным управление мультикоптером, в частности, на оси рыскания, поскольку сопротивление оказывает воздействие на каждую сторону крыла различным образом, так что выполнение каждой стороны крыла независимой создает очень небольшой момент по сравнению с моментом, создаваемым многовинтовыми моторами и винтами, по той же причине мультикоптер является более устойчивым в условиях ветра.
Свободное крыло (400) может быть снабжено поверхностями управления для обеспечения возможности оптимального, быстрого управления подъемной силой крыла или летательным аппаратом. В качестве альтернативы, свободное крыло (400) может быть снабжено ограничительным устройством для ограничения возможного вращения ветра в направлении вверх вокруг его оси (18). Иными словами, для создания подъемной силы на низких скоростях, задняя часть крыла не должна возвышаться на некоторое значение угла. Однако указанное ограничительное устройство не должно предотвращать опускание задней части крыла, что необходимо для взлета, зависания или посадки.
Второй вариант реализации настоящего изобретения относится к
мультикоптеру (1000), который схематически изображен на фиг. 4 и 5. Как правило, вращение вокруг оси (1026), которая представляет собой вертикальную ось многовинтового летательного аппарата (1000), является результатом различия моментов между винтами (5000), вращающимися по часовой стрелке, и винтами, вращающимися против часовой стрелки. Эти моменты являются относительно малыми для оптимального управления мультикоптером. Мультикоптер(1000) содержит шасси (2000) и четыре или более винтов (5000). Шасси (2000) состоит из основного корпуса (2100) и пары валов (2200) (2300), которые, с целью данного разъяснения, называются в настоящем документе «правым валом» (2200) и «левым валом» (2300).
Винт (5000) прикреплен к концу каждого из указанных валов, а каждый вал (2200) (2300) соединен с основным корпусом (2100) с помощью осевого соединения (1018). Предполагая, что четыре винта (5000) работают с одинаковой силой, например, направленной вверх, мультикоптер (1000) будет подниматься вертикально таким образом, что все четыре двигателя (5000) будут находиться в одной горизонтальной плоскости.
В случае если пользователю будет необходимо рысканиемультикоптера (1000), скажем, вправо, он может это выполнить посредством увеличения мощности на одном винте на правом валу (2200) и уменьшения мощности на другом винте на этом же валу (2200). Это приведет к вращению правого вала (2200) вокруг оси (1018), соединенной с основным корпусом (2100), поскольку один винт будет подниматься, а другой будет опускаться, в результате приводя к рысканиюмультикоптера вправо.
На фиг. 4 изображен мультикоптер(1000) с рысканием вправо по часовой стрелке ввиду увеличения силы тяги двигателя (1014) на правом валу (2200) и двигателя (1020) на левом валу (2300) (также представляется возможным одновременное уменьшение силы тяги двигателей 1016 и 1022), тем самым приводя к рысканию мультикоптера вокруг основной оси (1026).Нафиг. 5 изображенапротивоположнаяситуациясрысканиеммультикоптеравлево.
Третий вариант реализации настоящего изобретения относится к вышеуказанному мультикоптеру (1000), который также снабжен свободным крылом (400), прикрепленным к основному корпусу (2100) шасси (2000) с помощью осевого соединения, как схематически изображено на фиг. 6-9 в нескольких положениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ КОМБИНИРОВАННОГО НАЗНАЧЕНИЯ И ГИБРИДНОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ ВИНТОМОТОРНЫХ ГРУПП | 2022 |
|
RU2803214C1 |
| Летательный аппарат вертикального взлета и посадки с дополнительными грузовыми модулями и выдвигаемыми воздушными винтами | 2021 |
|
RU2759061C1 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| Летательный аппарат на базе свободного подвеса биплана с мультироторной системой | 2024 |
|
RU2839620C1 |
| МУЛЬТИКОПТЕР С ДВУХЪЯРУСНЫМ РАСПОЛОЖЕНИЕМ ВИНТОМОТОРНЫХ ГРУПП | 2021 |
|
RU2766284C1 |
| Летательный аппарат, выполненный с возможностью вертикального взлета | 2016 |
|
RU2704771C2 |
| АЭРОПОЕЗД С ПИТАНИЕМ ОТ ТРОЛЛЕЯ (ВАРИАНТЫ) | 2018 |
|
RU2692345C1 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2618832C1 |


Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Многовинтовой летательный аппарат (100) содержит шасси (200), три или более двигателей (300) и одно или более крыльев (400). Каждое свободное крыло (400) прикреплено к указанному шасси с помощью осевого соединения (18) таким образом, что обеспечивается возможность изменения угла наклона свободного крыла относительно указанного шасси, в соответствии с направлением потока воздуха над свободным крылом. Летательный аппарат может быть снабжен поверхностями управления или устройствами ограничения движения. 2 н. и 2 з.п. ф-лы, 9 ил.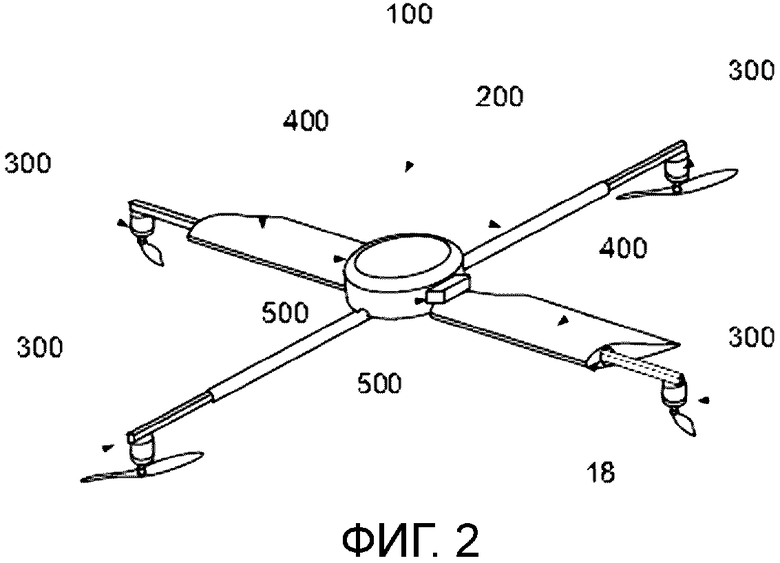
1. Многовинтовой летательный аппарат, который содержит шасси (200), по меньшей мере три двигателя (300), каждый из которых снабжен винтом, а также по меньше мере одно свободное крыло (400); причем указанное свободное крыло (400) прикреплено к указанному шасси с помощью осевого соединения (18) таким образом, что угол наклона свободного крыла может изменяться относительно шасси ввиду потока воздуха над указанным свободным крылом.
2. Многовинтовой летательный аппарат, который содержит шасси (200), по меньшей мере три двигателя (300), каждый из которых снабжен винтом, по меньшей мере одно свободное крыло (400) и управляемый компьютером привод (500); причем свободное крыло (400) прикреплено к указанному шасси с помощью осевого соединения (18) таким образом, что указанный управляемый компьютером привод выполнен с возможностью изменения угла наклона свободного крыла относительно указанного шасси указанным управляемым компьютером приводом (500), в соответствии с потоком воздуха над указанным свободным крылом.
3. Многовинтовой летательный аппарат по п. 1 или 2, в котором указанное свободное крыло снабжено поверхностью управления, которая выполнена с возможностью обеспечения управления степенью и направлениями подъемной силой и силой сопротивления указанного свободного крыла, а также маневрами многовинтового летательного аппарата.
4. Многовинтовой летательный аппарат по п. 1 или 2, который дополнительно содержит ограничительное устройство, которое выполнено с возможностью ограничения возможности вращения указанного свободного крыла вверх вокруг указанного осевого соединения.
| JP 2012228944 A, 22.11.2012 | |||
| US 20140131507 A1, 15.05.2014 | |||
| БЕЗОПАСНЫЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2006 |
|
RU2324626C1 |
| ФЛЮГЕРНОЕ КРЫЛО | 2008 |
|
RU2375252C1 |
| CN 102285450 A, 21.12.2011 | |||
| Прибор для контроля изделий с винтовой поверхностью | 1955 |
|
SU104150A1 |

