FIELD: control systems.
SUBSTANCE: invention relates to control systems and can be used in creation of setting devices for copying control systems implemented in form of exoskeleton with non-stiff attachments to operator's body. Disclosed is a method for indirect measurement of rotation angles in operator's joints, based on use for measurement of exoskeleton with kinematic scheme, similar to kinematic scheme of human hand, links of which are located along operator's hands, fixed on operator's body with the help of rigid and non-rigid fixtures, rotation angles measurement θ in exoskeleton kinematic pairs. Additionally measuring lB1-B2 is operator shoulder length, lB2-B3 is the length of the forearm of the operator, calculating the Cartesian coordinates vectors of the shoulder joint B1; wrist joint B3, operator's hand center B4, elbow articulation of exoskeleton C2 by solving the kinematics direct problem, values of projections of vector B1B3 are calculated, connecting the shoulder and wrist joints of the operator, calculating the distance between the shoulder and wrist joints of the operator lB1-B3, calculating semi -perimeter p of triangle formed by shoulder, elbow and wrist joints of operator, calculating distance lK2-B2 from center of circle K2, formed by virtual rotation of elbow joint operator around axis passing through shoulder and wrist joints, and elbow joint operator by formula:

calculating distance lB1-K2 between shoulder joint and center of circle K2 by formula:  calculating coordinates of point K2 by formula:
calculating coordinates of point K2 by formula: 
 where λ is ratio, in which point K2 divides section B1B3, calculating two versions of B(n)2a and B(n)2b vectors of values of Cartesian coordinates of elbow joint by solving system of equations:
where λ is ratio, in which point K2 divides section B1B3, calculating two versions of B(n)2a and B(n)2b vectors of values of Cartesian coordinates of elbow joint by solving system of equations: 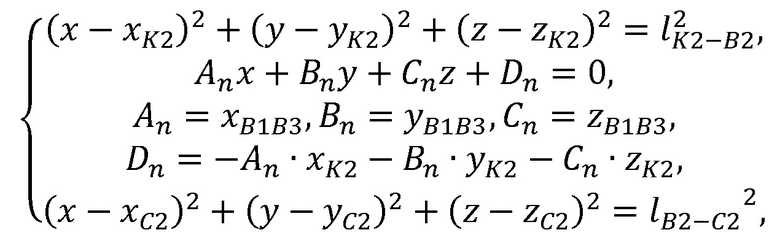 where xK2, yK2, zK2 – Cartesian coordinates of point K2; An, Bn, Cn, Dn are coefficients of plane perpendicular to section B1B3 and passing through point K2; xB1B3, yB1B3, zB1B3 are values of projections of vector B1B3 on Cartesian coordinate system axis; xC2, yC2, zC2 – Cartesian coordinates of joint C2; lB2-C2 – effective length of non-rigid attachment, the value of which is selected from the condition of minimizing the error of indirect measurement of turning angles in operator's joints, selecting one of calculated versions B(n)2a and B(n)2b Cartesian coordinates vector of the elbow joint from the condition of the shortest distance to the previous known position of the elbow joint B(n-1)2, where n is number of current iteration of indirect measurement of turning angles of operator's joints, rotation angle vector is formed in the operator's joints by solving the inverse kinematics problem for the known Cartesian coordinates of the operator's joints.
where xK2, yK2, zK2 – Cartesian coordinates of point K2; An, Bn, Cn, Dn are coefficients of plane perpendicular to section B1B3 and passing through point K2; xB1B3, yB1B3, zB1B3 are values of projections of vector B1B3 on Cartesian coordinate system axis; xC2, yC2, zC2 – Cartesian coordinates of joint C2; lB2-C2 – effective length of non-rigid attachment, the value of which is selected from the condition of minimizing the error of indirect measurement of turning angles in operator's joints, selecting one of calculated versions B(n)2a and B(n)2b Cartesian coordinates vector of the elbow joint from the condition of the shortest distance to the previous known position of the elbow joint B(n-1)2, where n is number of current iteration of indirect measurement of turning angles of operator's joints, rotation angle vector is formed in the operator's joints by solving the inverse kinematics problem for the known Cartesian coordinates of the operator's joints.
EFFECT: invention provides higher accuracy of measurement of turning angles in operator's joints.
1 cl, 3 dwg
| Title | Year | Author | Number |
|---|---|---|---|
| ANTROPOMORPHIC MANIPULATOR CONTROL SYSTEM | 2018 |
|
RU2710290C1 |
| METHOD OF MASTERING CONTROL OF MANIPULATORS OF ANTHROPOMORPHIC ROBOT | 2019 |
|
RU2724769C1 |
| COMPLEX OF MASTERING CONTROL OF ANTHROPOMORPHIC ROBOT MANIPULATORS | 2019 |
|
RU2725930C1 |
| METHOD FOR CALIBRATION OF EXOSKELETON LEVER SYSTEM ENCODERS | 2019 |
|
RU2724777C1 |
| ROBOT SIMULATOR FOR INDIVIDUALS WITH FUNCTIONAL DISORDERS OF LOCOMOTOR SYSTEM | 2015 |
|
RU2604038C1 |
| WEARABLE GEAR TO SUPPORT USER'S HANDS | 2021 |
|
RU2809267C1 |
| WEARABLE DEVICE TO SUPPORT USER'S HANDS | 2021 |
|
RU2808690C1 |
| INDUSTRIAL EXOSKELETON FOR UPPER AND LOWER LIMBS | 2021 |
|
RU2793174C1 |
| OPERATOR CONTROL UNIT FOR ROBOTIC SURGICAL COMPLEX | 2019 |
|
RU2718595C1 |
| ROBOTIC DEVICE OF THE SIMULATOR FOR THE REHABILITATION OF LIMBS AND THE METHOD FOR ITS APPLICATION | 2021 |
|
RU2766754C1 |

