Изобретение относится к области военной техники в частности к пультам наведения (далее по тексту - ПН) установленного оборудования, в том числе вооружения объектов типа БМП, БМД, БТР, танков и другой военной техники, такой как системы управления дистанционно управляемых модулей систем вооружения.
Известен пульт наведения (управления) ИЦКР.468312.001 (См. Боевая машина пехоты БМП-3. Техническое описание и инструкция по эксплуатации. Часть 1 и 2. Воениздат, Москва, 1998 г.), предназначенный для управлением стабилизатором вооружения (далее по тексту - СВ) ИЦКР.461314.001 (индекс 2Э52-2) БМП-3 с места командира и оператора, описанный в техническом описании ИЦКР.461314.001 ТО, привода наведения которого (см. рис. 1, стр. 97 и рис. 2 стр. 98 ИЦКР.461314.001 ТО - функциональных схем привода ВН и привода ГН) содержат пульты наведения (управления) командира и оператора (наводчика) ИЦКР.468312.001 (см. п. 6.5 стр. 32, рис. 7 стр. 103 - описание конструкции).
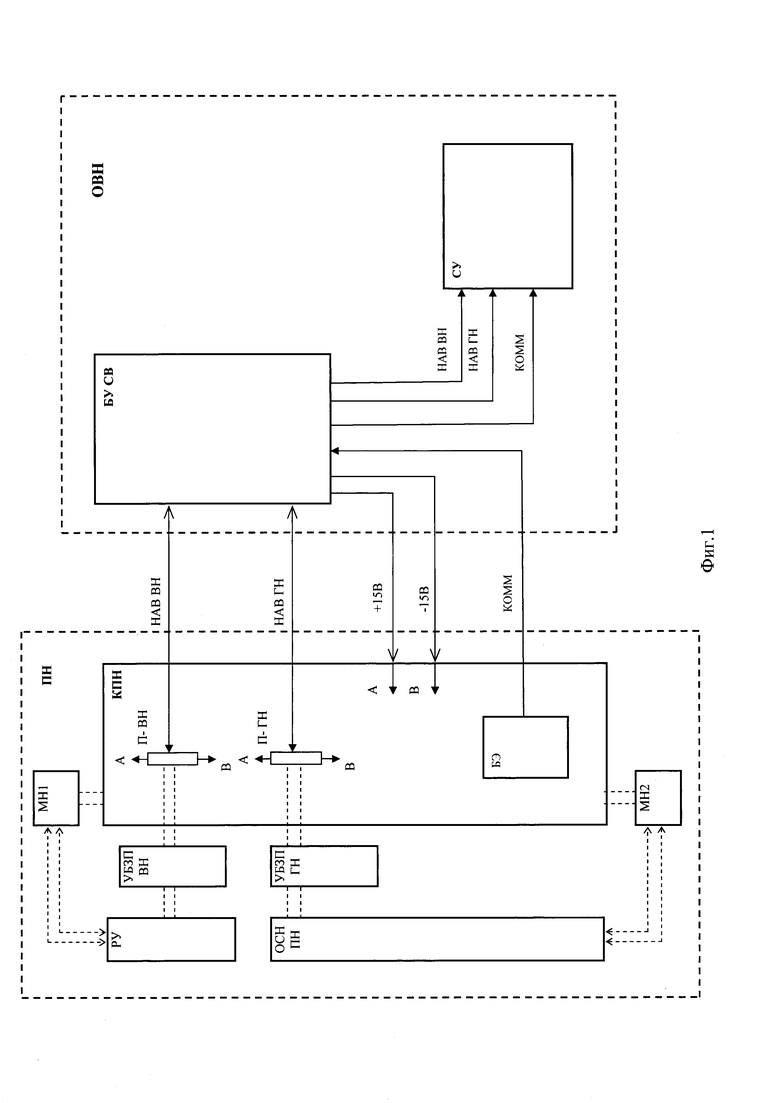
Данный пульт наведения стабилизатора вооружения принят за прототип. Структурная схема пульта наведения (управления) ИЦКР.468312.001 стабилизатора вооружения изображена на фиг. 1.
Конструктивно пульт наведения (ПН) состоит из: корпуса пульта наведения (КПН) (с передней и задней крышками), основания пульта наведения (ОСН ПН), ручек управления (РУ).
В пульте наведения (ПН) - прототипа также установлены:
- механизмы нульустановителей (МН1) и (МН2);
- устройства безлюфтовых зубчатых передач (УБЗП ВН) и (УБЗП ГН);
- потенциометры сигналов пульта наведения (П-ВН) и (П-ГН);
- блок электроэлементов (БЭ).
Потенциометры сигналов (П-ВН) и (П-ГН) предназначены для формирования напряжения постоянного тока, обеспечивающих наведение приводами ВН и ГН вооружения вверх-вниз и вправо-влево.
Устройства безлюфтовых зубчатых передач (УБЗП ВН) и (УБЗП ГН) предназначены для передачи отклонений ручек управления (РУ) относительно корпуса пульта наведения (КПН), и корпуса пульта наведения (КПН) относительно основания пульта наведения (ОСН ПН) на оси потенциометров (П-ВН) и (П-ГН) соответственно, с ограничением отклонений в пределах рабочих углов потенциометра.
Механизмы нульустановителей (МН1) и (МН2) предназначены для возврата осей потенциометров (П-ВН) и (П-ГН) и связанных с ними зубчатыми передачам (УБЗП ВН) и (УБЗП ГН) ручек управления (РУ) и корпуса пульта наведения (КПН) в исходное состояние, соответствующее сигналу пульта наведения равному нулю, и фиксации их в этом положении. Кроме того, механизм нульустановителя канала ГН (МН2) обеспечивает разграничение сигналов управления, соответствующих максимальной и перебросочной скорости, ступенью увеличения сопротивления повороту корпуса пульта за 2-3 градуса до жесткого упора.
Через блок электроэлементов (БЭ) производится подключение дискретных электрических сигналов от органов управления (тумблера, переключатели, кнопки) и светодиодной индикации, расположенных на рукоятках управления (РУ) и корпусе пульта наведения (КПН). Блок электроэлементов (БЭ) электрически связан с блоком управления стабилизатора вооружения (БУ СВ), входящего в систему управления (СУ) объекта военного назначения (ОВН).
Органы управления стабилизатором вооружения (СВ) расположены на передней крышке. Тумблера предназначены для включения, выключения и переключения режимов стабилизатора вооружения (СВ). В ручках управления (РУ) установлены кнопки, наименование, расположение и назначение которых показано на планке фирменной, закрепленной на корпусе пульта наведения. Тумблеры и кнопки ручек пульта наведения защищены резиновыми чехлами. Подключение в схему стабилизатора вооружения (СВ) осуществляется через штепсельный разъем.
Недостатками вышеуказанного пульта наведения - прототипа являются;
- необходимость использования дополнительных источников питания постоянного напряжения ±15 В, расположенных в блоке управления, что не соответствует требованиям, предъявляемым к современным СУ;
- плохая помехозащищенность слаботочного аналогового сигнала формируемого потенциометрами сигналов пульта наведения, из-за наличия большой длины сигнальных цепей между выходным разъемом ПН и схемой обработки сигнала, находящейся в СУ ОВН;
- наличие потенциометров со специальными жестко заданными выходными характеристиками от угла поворота, имеющими высокую стоимость;
- наличие контактных колец для обеспечения токосъема с обмоток потенциометров, что снижает надежность работы ПН и в целом СУ;
- отсутствие информационных каналов обмена ПН, что не позволяет оперативно и дистанционно проводить его настройку, переключение режимов работы, выбор характеристик выходного сигнала от угла поворота и диагностику в составе СУ;
- наличие редуктора для механической выставки нулевого положения потенциометров ПН при их настройке, что усложняет конструкцию ПН, снижает точность первоначальной выставки нулевого положения, а также требует дополнительных трудозатрат и контроля при настройке.
Техническими задачами заявляемого изобретения являются:
- исключение необходимости использования для работы ПН в составе СУ дополнительного источника питания постоянного напряжения ±15 В;
- повышение помехозащищенности сигнала, формируемого чувствительными элементами пульта наведения в составе СУ;
- исключение дорогостоящих потенциометров со специальными жестко заданными выходными характеристиками от угла поворота;
- повышение надежности работы ПН в составе СУ;
- введение современных информационных каналов обмена ПН с внешними устройствами СУ ОВН, позволяющими оперативно и дистанционно проводить его настройку, переключение режимов работы, выбор характеристик выходного сигнала от угла поворота и диагностику в составе СУ;
- исключение редуктора для механической выставки нулевого положения чувствительного элемента ПН при настройке.
Для достижения указанного технического результата в известный пульт наведения, содержащий основание пульта наведения (ОСН ПН), корпус пульта наведения (КПН), ручки управления (РУ), механизм нульустановителя первый (МН1), кинематически связанный с ручками управления (РУ) и механически связанный с корпусом пульта наведения (КПН), механизм нульустановителя второй (МН2), кинематически связанный с основанием пульта наведения (ОСН ПН) и механически связанный с корпусом пульта наведения (КПН), согласно изобретению, дополнительно введены:
- модуль питания пульта наведения (МП-ПН);
- формирующий усилитель переменного напряжения (ФУ);
- линейный дифференциальный трансформатор вертикального наведения (ЛДТ ВН);
- линейный дифференциальный трансформатор горизонтального наведения (ЛДТ ГН);
- первый, второй, третий и четвертый выпрямители (B1, В2, В3, В4);
- первый, второй, третий и четвертый фильтры (Ф1, Ф2, Ф3, Ф4);
- первый и второй суммирующие усилители (СУММ У 1, СУММ У 2);
- первый и второй нормирующие усилители (НУ1, НУ2);
- блок коммутации (БК);
- контроллер (К), включающий в себя:
- модуль аналого-цифрового преобразования (М-АЦП);
- тактовый генератор (ТГ);
- генератор частоты (ГЧ);
- модуль ввода вывода (МВВ);
- модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения (ВУ-ПН);
- постоянное запоминающее устройство (ПЗУ);
- формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN),
причем линейный дифференциальный трансформатор вертикального наведения (ЛДТ ВН) и линейный дифференциальный трансформатор горизонтального наведения (ЛДТ ГН) реализованы на базе катушки с выходными обмотками, соединенными по дифференциальной схеме с сердечником из магнитного материала,
при этом сердечник линейного дифференциального трансформатора вертикального наведения (ЛДТ ВН) кинематически по безлюфтовой схеме связан с ручками управления (РУ), а обмотка возбуждения линейного дифференциального трансформатора вертикального наведения (ЛДТ ВН) электрически соединена с формирующим усилителем переменного напряжения (ФУ), сердечник линейного дифференциального трансформатора горизонтального наведения (ЛДТ ГН) кинематически по безлюфтовой схеме связан с основанием пульта наведения (ОСН ПН), а обмотка возбуждения линейного дифференциального трансформатора горизонтального наведения (ЛДТ ГН) электрически соединена с формирующим усилителем переменного напряжения (ФУ),
в свою очередь первая и вторая выходные обмотки катушки линейного дифференциального трансформатора вертикального наведения (ЛДТ ВН) электрически соединены, соответственно, с первым и вторым выпрямителями (В1 и В2), которые, в свою очередь, электрически соединены соответственно с первым и вторым фильтром (Ф1 и Ф2), сигналы с которых поступают, соответственно, на первый и второй входы первого суммирующего усилителя (СУММ У 1), с выхода которого сигнал поступает на первый нормирующий усилитель (НУ1),
в свою очередь первая и вторая выходные обмотки катушки линейного дифференциального трансформатора горизонтального наведения (ЛДТ ГН) электрически соединены соответственно с третьим и четверым выпрямителями (В3 и В4), которые в свою очередь электрически соединены соответственно с третьим и четверым фильтром (Ф3 и Ф4), сигналы с которых поступают соответственно на первый и второй входы второго суммирующего усилителя (СУММ У 2), с выхода которого сигнал поступает на второй нормирующий усилитель (НУ2),
при этом выходной сигнал первого нормирующего усилителя (НУ1) поступает на первый вход модуля аналого-цифрового преобразования (М-АЦП), а выходной сигнал второго нормирующего усилителя (НУ2) поступает на второй вход модуля аналого-цифрового преобразования (М-АЦП), выходной сигнал модуля аналого-цифрового преобразования (М-АЦП) поступает в модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения (ВУ-ПН), который электрически соединен с постоянным запоминающим устройством (ПЗУ) и формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN), который в свою очередь электрически соединен с объектом военного назначения (ОВН),
в свою очередь тактовый генератор (ТГ) электрически соединен с генератором частоты (ГЧ), который соединен с первым входом формирующего усилителя переменного напряжения (ФУ),
при этом модуль питания пульта наведения (МП-ПН), с одной стороны, электрически соединен с +27 В от бортовой сети (БС) объекта военного назначения (ОВН), с другой стороны, первый выход (МП-ПН) соединен со вторым входом формирующего усилителя переменного напряжения (ФУ), а второй выход (МП-ПН) соединен с контроллером (К),
в свою очередь блок коммутации (БК) электрически соединен с модулем ввода вывода (МВВ).
Сопоставительный анализ с прототипом показывает, что в заявляемый пульт наведения (ПН) введены новые компоненты, а именно:
- модуль питания пульта наведения (МП-ПН);
- формирующий усилитель переменного напряжения (ФУ);
- линейный дифференциальный трансформатор вертикального наведения (ЛДТ ВН);
- линейный дифференциальный трансформатор горизонтального наведения (ЛДТ ГН);
- первый, второй, третий и четвертый выпрямители (B1, В2, В3, В4);
- первый, второй, третий и четвертый фильтры (Ф1, Ф2, Ф3, Ф4);
- первый и второй суммирующие усилители (СУММ У 1, СУММ У 2);
- первый и второй нормирующие усилители (НУ1, НУ2);
- блок коммутации (БК);
- контроллер (К), включающий в себя:
- модуль аналого-цифрового преобразования (М-АЦП);
- тактовый генератор (ТГ);
- генератор частоты (ГЧ);
- модуль ввода вывода (МВВ);
- модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения (ВУ-ПН);
- постоянное запоминающее устройство (ПЗУ);
- формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN), с их связями с другими элементами СУ ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в пульт наведения (ПН) позволяет:
- исключить необходимость использования для работы пульта наведения (ПН) в составе СУ дополнительного источника питания постоянного напряжения ±15 В, за счет использования встроенного модуля питания пульта наведения (МП-ПН), запитанного +27 В от бортовой сети (БС) объекта военного назначения (ОВН);
- повысить помехозащищенность сигнала, формируемого пультом наведения (ПН) в составе СУ, за счет местной (внутренней) обработки слаботочных аналоговых сигналов, формируемых линейными дифференциальными трансформаторами (ЛДТ ВН) и (ЛДТ ГН) с последующей передачей значения углового положения рукояток и корпуса пульта наведения (ПН) с использованием последовательной шины передачи данных типа CAN, которая, в свою очередь, менее подвержена внешнему воздействию, чем передача слаботочных аналоговых сигналов;
- исключить дорогостоящие потенциометры со специальными жестко заданными выходными характеристиками от угла поворота, за счет использования в качестве чувствительного элемента линейных дифференциальных трансформаторов (ЛДТ), при этом необходимая передаточная функция от угла поворота рукояток и корпуса пульта наведения (ПН) формируется в вычислительном устройстве (ВУ-ПН) контроллера (К), при этом имеется возможность дистанционно по последовательной шине передачи данных типа CAN устанавливать необходимую передаточную функцию, заложенную в постоянное запоминающее устройство (ПЗУ);
- повысить надежность работы ПН в составе СУ, за счет исключения потенциометров и применения бесконтактных чувствительных элементов линейных дифференциальных трансформаторов (ЛДТ) (без использования контактных колец для обеспечения токосъема с обмоток потенциометров), обработка сигналов с которых осуществляется при помощи выпрямителей (B1, В2, В3, В4), фильтров (Ф1, Ф2, Ф3, Ф4), сумматоров (СУ1, СУ2), нормирующих усилителей (НУ1, НУ2);
- ввести современный информационный канал обмена и передачи данных типа CAN в пульт наведения (ПН) с внешними устройствами СУ ОВН, позволяющий оперативно и дистанционно проводить его настройку, переключать режимы работы, за счет использования блока коммутации (БК) в связи с модулем ввода вывода (МВВ) контроллера (К), выбирать характеристики выходного сигнала от угла поворота, а также проводить диагностику в составе СУ;
- исключить редуктор для механической выставки нулевого положения чувствительного элемента при настройке пульта наведения (ПН), за счет возможности сохранения текущих данных о нулевом положении линейных дифференциальных трансформаторов (ЛДТ) в постоянное запоминающее устройство (ПЗУ), при этом данную операцию имеется возможность проводить дистанционно по последовательной шине передачи данных типа CAN.
Предлагаемое изобретение позволяет улучшить технические и эксплуатационные характеристики СУ ОВН с предлагаемым пультом наведения (ПН), указанных выше боевых машин и боевых модулей дистанционно-управляемых систем вооружения, решить вопросы по их оперативной настройке и диагностике, а также диагностике пульта наведения (ПН) в составе СУ, что достигается применением в предлагаемом пульте наведения (ПН) цифрового контроллера (К), разработанного на новой элементной базе, построенной на современной цифровой платформе с использованием высокоскоростного цифрового информационного канала обмена данных типа CAN по последовательной шине (ПШ) с внешними устройствами ОВН.
Устройство и работа заявляемого изобретения поясняются графическими материалами.
На фиг. 1 приведена структурная схема пульта наведения (ПН) - прототипа;
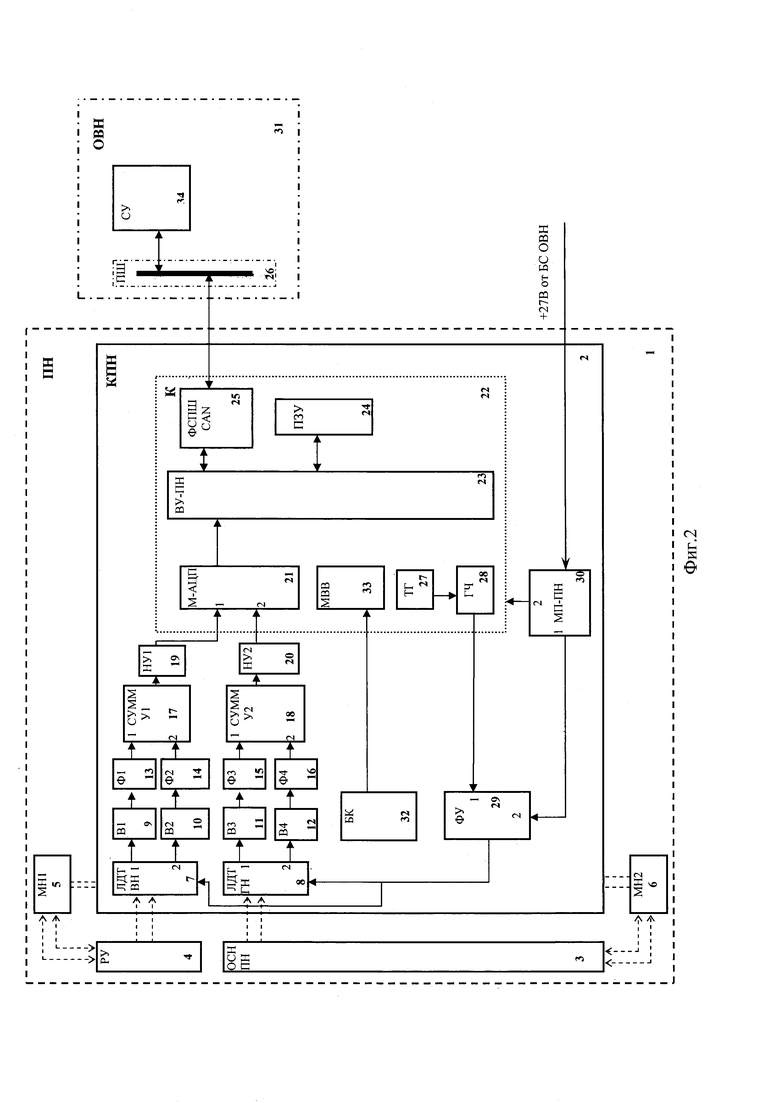
на фиг. 2 приведена заявляемая структурная схема пульта наведения (ПН).
Сокращения, принятые в тексте и на фиг. 1, и фиг. 2:
БК - блок коммутации;
БС ОВН - бортовая сеть объекта военного назначения;
БУ СВ - блок управления стабилизатора вооружения;
БЭ - блок электроэлементов;
ВН - привод вертикального наведения;
B1, В2, В3, В4 - первый, второй, третий и четвертый выпрямители;
ВУ-ПН - модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения;
ГН - привод горизонтального наведения;
ГЧ - генератор частоты,
К - контроллер;
КОММ - дискретный сигнал коммутации;
КПН - корпус пульта наведения;
ЛДТ ВН - линейный дифференциальный трансформатор вертикального наведения;
ЛДТ ГН - линейный дифференциальный трансформатор горизонтального наведения;
М-АЦП - модуль аналого-цифрового преобразования; МВВ - модуль ввода вывода;
МН1, МН2 - первый и второй механизм нульустановителя;
МП-ПН - модуль питания пульта наведения;
НАВ ВН - аналоговый сигнал наведения ВН;
НАВ ГН - аналоговый сигнал наведения ГН;
НУ1, НУ2 - первый и второй нормирующие усилители;
ОВН - объект военного назначения;
ОСН ПН - основание пульта наведения;
ПЗУ - постоянное запоминающее устройство;
П-ВН - потенциометр сигнала пульта наведения ВН;
П-ГН - потенциометр сигнала пульта наведения ГН;
ПН - пульт наведения;
РУ - ручки управления;
ПШ - последовательная шина;
СВ - стабилизатор вооружения;
СУ - система управления;
СУММ У 1, СУММ У 2 - первый и второй суммирующие усилители;
ТГ - тактовый генератор;
УБЗП ВН - устройство безлюфтовой зубчатой передачи ВН;
УБЗП ГН - устройство безлюфтовой зубчатой передачи ГН;
Ф1, Ф2, Ф3, Ф4 - первый, второй, третий и четвертый фильтры;
ФУ - формирующий усилитель переменного напряжения;
ФСПШ CAN - формирователь сигналов последовательной шины канала типа CAN;
ОВН - объект военного назначения.
Пульт наведения (ПН) 1 содержит корпус пульта наведения (КПН) 2, основание пульта наведения (ОСН ПН) 3, ручки управления (РУ) 4, при этом корпус пульта наведения (КПН) 2 жестко механически связан с первым и вторым механизмами нульустановителя соответственно (МН1) 5 и (МН2) 6, в свою очередь, механизм нульустановителя (МН1) 5 кинематически связан с ручками управления (РУ) 4, а механизм нульустановителя (МН2) 6 кинематически связан с основанием пульта наведения (ОСН ПН) 3. Линейный дифференциальный трансформатор вертикального наведения (ЛДТ ВН) 7 кинематически по безлюфтовой схеме связан с ручками управления (РУ) 4, а линейный дифференциальный трансформатор горизонтального наведения (ЛДТ ГН) 8 кинематически по безлюфтовой схеме связан с основанием пульта наведения (ОСН ПН) 3, причем первый и второй выходы (ЛДТ ВН) 7 электрически соединены, соответственно, с первым и вторым выпрямителями (В1) 9 и (В2) 10, а первый и второй выходы (ЛДТ ГН) 8 электрически соединены соответственно с третьим и четвертым выпрямителями (В3) 11 и (В4) 12.
Выходы первого, второго, третьего и четвертого выпрямителей (В1) 9, (В2) 10, (В3) 11, (В4) 12, соответственно, электрически соединены с входами первого, второго, третьего и четвертого фильтров (Ф1) 13, (Ф2) 14, (Ф3) 15, (Ф4) 16. Выходы первого и второго фильтров (Ф1) 13 и (Ф2) 14 поступают, соответственно, на первый и второй входы первого суммирующего усилителя (СУММ У 1) 17. Выходы третьего и четвертого фильтров (Ф3) 15 и (Ф4) 16 поступают, соответственно, на первый и второй входы второго суммирующего усилителя (СУММ У 2) 18. С выхода суммирующего усилителя (СУММ У 1) 17 сигнал поступает на первый нормирующий усилитель (НУ1) 19. С выхода суммирующего усилителя (СУММ У 2) 18 сигнал поступает на второй нормирующий усилитель (НУ2) 20.
Выходной сигнал первого нормирующего усилителя (НУ1) 19 поступает на первый вход модуля аналого-цифрового преобразования (М-АЦП) 21 контроллера (К) 22, а выходной сигнал второго нормирующего усилителя (НУ2) 20 поступает на второй вход модуля аналого-цифрового преобразования (М-АЦП) 21, выходной сигнал модуля аналого-цифрового преобразования (М-АЦП) 21 поступает в модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения (ВУ-ПН) 23, который электрически соединен с постоянным запоминающим устройством (ПЗУ) 24 и формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN) 25, который в свою очередь электрически соединен с последовательной шиной (ПШ) 26. Тактовый генератор (ТГ) 27 контроллера (К) 22 электрически соединен с генератором частоты (ГЧ) 28, который соединен с первым входом формирующего усилителя переменного напряжения (ФУ) 29. Модуль питания пульта наведения (МП-ПН) 30, с одной стороны, электрически соединен с +27 В от бортовой сети (БС) объекта военного назначения (ОВН) 31, с другой стороны, первый выход (МП-ПН) 30 соединен со вторым входом формирующего усилителя переменного напряжения (ФУ) 29, а второй выход (МП-ПН) 30 соединен с контроллером (К) 22.
Блок коммутации (БК) 32 электрически соединен с модулем ввода вывода (МВВ) 33 контроллера (К) 22. Выход формирующего усилителя переменного напряжения (ФУ) 29 электрически соединен с обмоткой возбуждения (ЛДТ ВН) 7 и обмоткой возбуждения (ЛДТ ГН) 8.
Последовательная шина (ПШ) 26 электрически соединена с системой управления (СУ) 34 объекта военного назначения (ОВН) 31.
Пульт наведения работает следующим образом:
При подаче питания+27 В от бортовой сети (БС) объекта военного назначения (ОВН) 31 через систему управления (СУ) 34 на пульт наведения (ПН) 1 происходит включение модуля питания пульта наведения (МП-ПН) 30, который вырабатывает стабилизированные напряжения ±15 В, +5 В и +3,3 В. При этом стабилизированные напряжения ±15 В подаются на второй вход формирующего усилителя переменного напряжения (ФУ) 29, выход которого электрически соединен с обмоткой возбуждения (ЛДТ ВН) 7 и обмоткой возбуждения (ЛДТ ГН) 8. Линейный дифференциальный трансформатор вертикального наведения (ЛДТ ВН) 7 и линейный дифференциальный трансформатор горизонтального наведения (ЛДТ ГН) 8 реализованы на базе катушки с выходными обмотками, соединенными по дифференциальной схеме с сердечником из магнитного материала. Сердечник (ЛДТ ВН) 7 кинематически по безлюфтовой схеме связан с ручками управления (РУ) 4, а сердечник (ЛДТ ГН) 8 кинематически по безлюфтовой схеме связан с основанием пульта наведения (ОСН ПН) 3. Корпус пульта наведения (КПН) 2 жестко механически связан с первым и вторым механизмами нульустановителя соответственно (МН1) 5 и (МН2) 6, в свою очередь механизм нульустановителя (МН1) 5 кинематически связан с ручками управления (РУ) 4, а механизм нульустановителя (МН2) 6 кинематически связан с основанием пульта наведения (ОСН ПН) 3. Механизмы нульустановителей предназначены для возврата ручек управления (РУ) 4 и корпуса пульта наведения (КПН) 2 в исходное состояние, соответствующее сигналам с пульта наведения по ВН и ГН равным нулю, и фиксации их в этом положении. Кроме того, механизм нульустановителя канала ГН (МН2) 6 обеспечивает разграничение сигналов наведения, соответствующих максимальной и перебросочной скорости, ступенью увеличения сопротивления повороту корпуса пульта наведения (КПН) 2 за 2-3 градуса до жесткого упора.
Стабилизированные напряжения +5 В и +3,3 В поступают на контроллер (К) 22 и используются для работы процессорного ядра и периферийной логики.
Тактовый генератор (ТГ) 27 контроллера (К) 22 генерирует электрические импульсы прямоугольной формы и необходим для синхронизации работы соединенных с ним модулей аналого-цифрового преобразования (М-АЦП) 21, а также модуля генератора частоты (ГЧ) 28.
Модуль генератора частоты (ГЧ) 28 контроллера (К) 22 представляет собой цифровой генератор напряжения типа меандр частотой около 2000 Гц. Сигнал с генератора частоты (ГЧ) 28 в виде меандра поступает на первый вход формирующего усилителя переменного напряжения (ФУ) 29, где происходит его преобразование путем фильтрации через апериодическое звено в псевдо синусоидальный сигнал и усиление до необходимого значения амплитуды, требуемой для питания обмоток возбуждения (ЛДТ ВН) 7 и (ЛДТ ГН) 8.
При повороте ручек управления (РУ) 4 относительно корпуса (КПН) 2 в вертикальной плоскости, безлюфтовой кривошипно-шатунный механизм перемещает сердечник из магнитного материала внутри катушки с выходными обмотками (ЛДТ ВН) 7, соединенными по дифференциальной схеме. При этом на обмотках катушки формируется дифференциальный разностный электрический сигнал пропорциональный углу отклонения ручек управления (РУ) 4.
При повороте корпуса пульта наведения (КПН) 2 относительно основания пульта наведения (ОСН ПН) 3 в горизонтальной плоскости, безлюфтовой кривошипно-шатунный механизм перемещает сердечник из магнитного материала внутри катушки с выходными обмотками (ЛДТ ГН) 8, соединенными по дифференциальной схеме. При этом на обмотках катушки формируется дифференциальный разностный электрический сигнал, пропорциональный углу отклонения корпуса пульта наведения (КПН) 2 относительно основания пульта наведения (ОСН ПН) 3.
Разностный электрический сигнал, пропорциональный углу отклонения ручек управления (РУ) 4 и корпуса пульта наведения (КПН) 2, подается, соответственно, на первый и второй выпрямители (В1) 9 и (В2) 10, и на третий и четвертый выпрямители (В3) 11 и (В4) 12. Выпрямители построены по мостовой схеме и осуществляют двух полупериодное выпрямление поступающего сигнала переменного тока. Выходы первого, второго, третьего и четвертого выпрямителей (В1) 9, (В2) 10, (В3) 11, (В4) 12, соответственно, электрически соединены с входами первого, второго, третьего и четвертого фильтров (Ф1) 13, (Ф2) 14, (Ф3) 15, (Ф4) 16. Фильтры построены по принципу апериодического звена и служат для сглаживания пульсаций полученных после выпрямителей сигналов. Выходы первого и второго фильтров (Ф1) 13 и (Ф2) 14 поступают, соответственно, на первый и второй входы первого суммирующего усилителя (СУММ У 1) 17. Выходы третьего и четвертого фильтров (Ф3) 15 и (Ф4) 16 поступают, соответственно, на первый и второй входы второго суммирующего усилителя (СУММ У 2) 18. Суммирующие усилители формируют из разностных сигналов духполярный сигнал постоянного тока. С выхода суммирующего усилителя (СУММ У 1) 17 сигнал поступает на первый нормирующий усилитель (НУ1) 19. С выхода суммирующего усилителя (СУММ У 2) 18 сигнал поступает на второй нормирующий усилитель (НУ2) 20. Нормирующие усилители выполняют защитную функцию для модуля аналого-цифрового преобразования (М-АЦП) 21, не позволяя сигналам превышать заданные электрические нормы.
Выходной сигнал первого нормирующего усилителя (НУ1) 19 поступает на первый вход модуля аналого-цифрового преобразования (М-АЦП) 21 контроллера (К) 22, а выходной сигнал второго нормирующего усилителя (НУ2) 20 поступает на второй вход модуля аналого-цифрового преобразования (М-АЦП) 21. Модуль аналого-цифрового преобразования (М-АЦП) 21 выполняет функцию преобразования аналоговых сигналов поступающих на его входы в многоразрядный код, пропорциональный углу поворота ручек управления (РУ) 4 и корпуса пульта наведения (КПН) 2. Выходной сигнал модуля аналого-цифрового преобразования (М-АЦП) 21 поступает в модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения (ВУ-ПН) 23, который электрически соединен с постоянным запоминающим устройством (ПЗУ) 24 и формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN) 25, который в свою очередь электрически соединен с последовательной шиной (ПШ) 26. При этом необходимая передаточная функция от угла поворота рукояток управления (РУ) 4 и корпуса пульта наведения (КПН) 2 формируется в вычислительном устройстве (ВУ-ПН) 23 контроллера (К) 22, при этом имеется возможность дистанционно по последовательной шине (ПШ) 26 устанавливать необходимую передаточную функцию, заложенную в постоянное запоминающее устройство (ПЗУ) 24.
Блок коммутации (БК) 32 электрически соединен с модулем ввода вывода (МВВ) 33 контроллера (К) 22. Через блок коммутации (БК) 32 производится подключение дискретных электрических сигналов от органов управления (тумблера, переключатели, кнопки) и светодиодной индикации, расположенных на рукоятках управления (РУ) 4 и корпусе пульта наведения (КПН) 2 с модулем ввода вывода (МВВ) 33 контроллера (К) 22.
Последовательная шина (ПШ) 26 электрически соединена с системой управления (СУ) 34 объекта военного назначения (ОВН) 31.
Большинство новых элементов, а именно модуль аналого-цифрового преобразования (М-АЦП), тактовый генератор (ТГ), генератор частоты (ГЧ), модуль ввода вывода (МВВ), модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения (ВУ-ПН), постоянное запоминающее устройство (ПЗУ), формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN), заявляемого пульта наведения реализованы как часть программного обеспечения контроллера (К), при этом обработка получаемых и передаваемых данных осуществляется модулями контроллера, такими как, модуль аналого-цифрового преобразования, модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения и модуля формирователя сигналов последовательной шины типа CAN.
Выходной каскад формирующего усилителя переменного напряжения для питания обмоток возбуждения линейных дифференциальных трансформаторов может быть выполнен по мостовой схеме, построенной на транзисторных сборках, управляемых в линейном режиме.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию» пер.с англ. - М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники», пер. с англ. - 4-е изд. перераб. и доп. - М.: Мир, 1993).
(См. книгу Войтицкий С.А., Войтицкая Г.Н. Аналого-цифровой преобразователь сигналов синусно-косинусного вращающегося трансформатора в опорно-поворотном устройстве малогабаритной РЛС наземного базирования // Вестник Тульского государственного университета. Сер. Системы управления. 2010. Вып. 1).
(См. Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2006. 856 с.).
Таким образом, заявляемый в качестве изобретения пульт наведения системы управления позволяет:
- исключить необходимость использования для работы пульта наведения (ПН) в составе СУ дополнительного источника питания постоянного напряжения ±15 В, за счет использования встроенного модуля питания пульта наведения (МП-ПН), запитанного +27 В от бортовой сети (БС) объекта военного назначения (ОВН);
- повысить помехозащищенность сигнала, формируемого пультом наведения (ПН) в составе СУ, за счет местной (внутренней) обработки слаботочных аналоговых сигналов, формируемых линейными дифференциальными трансформаторами (ЛДТ ВН) и (ЛДТ ГН) с последующей передачей значения углового положения рукояток и корпуса пульта наведения (ПН) с использованием последовательной шины передачи данных типа CAN, которая, в свою очередь, менее подвержена внешнему воздействию, чем передача слаботочных аналоговых сигналов;
- исключить дорогостоящие потенциометры со специальными жестко заданными выходными характеристиками от угла поворота, за счет использования в качестве чувствительного элемента линейных дифференциальных трансформаторов (ЛДТ), при этом необходимая передаточная функция от угла поворота рукояток и корпуса пульта наведения (ПН) формируется в вычислительном устройстве (ВУ-ПН) контроллера (К), при этом имеется возможность дистанционно по последовательной шине передачи данных типа CAN устанавливать необходимую передаточную функцию, заложенную в постоянное запоминающее устройство (ПЗУ);
- повысить надежность работы ПН в составе СУ, за счет исключения потенциометров и применения бесконтактных чувствительных элементов линейных дифференциальных трансформаторов (ЛДТ) (без использования контактных колец для обеспечения токосъема с обмоток потенциометров), обработка сигналов с которых осуществляется при помощи выпрямителей (Bl, В2, В3, В4), фильтров (Ф1, Ф2, Ф3, Ф4), сумматоров (СУ1, СУ2), нормирующих усилителей (НУ1, НУ2);
- ввести современный информационный канал обмена и передачи данных типа CAN в пульт наведения (ПН) с внешними устройствами СУ ОВН, позволяющий оперативно и дистанционно проводить его настройку, переключать режимы работы, за счет использования блока коммутации (БК) в связи с модулем ввода вывода (МВВ) контроллера (К), выбирать характеристики выходного сигнала от угла поворота, а также проводить диагностику в составе СУ;
- исключить редуктор для механической выставки нулевого положения чувствительного элемента при настройке пульта наведения (ПН), за счет возможности сохранения текущих данных о нулевом положении линейных дифференциальных трансформаторов (ЛДТ) в постоянное запоминающее устройство (ПЗУ), при этом данную операцию имеется возможность проводить дистанционно по последовательной шине передачи данных типа CAN.
Таким образом, поставленные технические задачи достигнуты.
Приведенные в описании технические преимущества, целесообразность и надежность пульта наведения, реализованного по заявляемой структурной схеме, подтверждены испытаниями образцов в составе СУ на испытательной базе ОАО «СКБ ПА» и ОАО «КЭМЗ» г. Ковров, АО «УКБТМ» и АО «НПК Уралвагонзавод» г. Нижний Тагил, а также АО «КБП» г. Тула.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2014 |
|
RU2550407C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2789421C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
Изобретение относится к области военной техники, в частности к пультам наведения установленного оборудования, в том числе вооружения объектов типа БМП, БМД, БТР, танков и другой военной техники, а также систем управления (СУ) дистанционно управляемых модулей систем вооружения. Техническим результатом являются повышение помехозащищенности сигнала пульта наведения, введение современных каналов обмена пульта наведения с внешними устройствами. Для этого в пульт наведения дополнительно введены с соответствующими связями с другими элементами СУ и ОВН модуль питания пульта наведения, формирующий усилитель переменного напряжения, линейный дифференциальный трансформатор вертикального наведения, линейный дифференциальный трансформатор горизонтального наведения, четыре выпрямителя, четыре фильтра, два суммирующих усилителя, два нормирующих усилителя, блок коммутации, контроллер, включающий в себя: модуль аналого-цифрового преобразования, тактовый генератор, генератор частоты, модуль ввода-вывода, модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения, постоянное запоминающее устройство, формирователь сигналов последовательной шины канала типа CAN. 2 ил.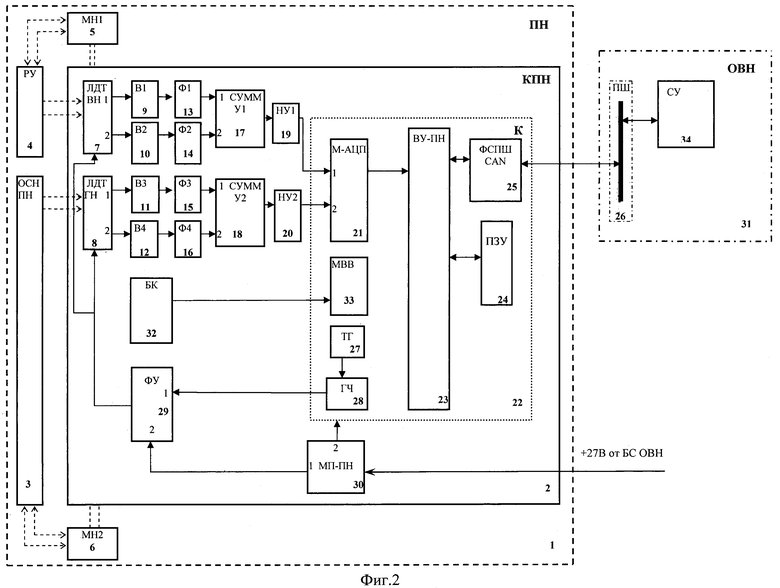
Пульт наведения, содержащий основание пульта наведения, корпус пульта наведения, ручки управления, механизм нульустановителя первый, кинематически связанный с ручками управления и механически связанный с корпусом пульта наведения, механизм нульустановителя второй, кинематически связанный с основанием пульта наведения и механически связанный с корпусом пульта наведения, отличающийся тем, что в него дополнительно введены модуль питания пульта наведения, формирующий усилитель переменного напряжения, линейный дифференциальный трансформатор вертикального наведения, линейный дифференциальный трансформатор горизонтального наведения, первый, второй, третий и четвертый выпрямители, первый, второй, третий и четвертый фильтры, первый и второй суммирующие усилители, первый и второй нормирующие усилители, блок коммутации, контроллер, включающий в себя модуль аналого-цифрового преобразования, тактовый генератор, генератор частоты, модуль ввода вывода, модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения, постоянное запоминающее устройство, формирователь сигналов последовательной шины канала типа CAN,
причем линейный дифференциальный трансформатор вертикального наведения и линейный дифференциальный трансформатор горизонтального наведения реализованы на базе катушки с выходными обмотками, соединенными по дифференциальной схеме с сердечником из магнитного материала,
при этом сердечник линейного дифференциального трансформатора вертикального наведения кинематически по безлюфтовой схеме связан с ручками управления, а обмотка возбуждения линейного дифференциального трансформатора вертикального наведения электрически соединена с формирующим усилителем переменного напряжения, сердечник линейного дифференциального трансформатора горизонтального наведения кинематически по безлюфтовой схеме связан с основанием пульта наведения, а обмотка возбуждения линейного дифференциального трансформатора горизонтального наведения электрически соединена с формирующим усилителем переменного напряжения,
в свою очередь, первая и вторая выходные обмотки катушки линейного дифференциального трансформатора вертикального наведения электрически соединены, соответственно, с первым и вторым выпрямителями, которые, в свою очередь, электрически соединены соответственно с первым и вторым фильтром, сигналы с которых поступают, соответственно, на первый и второй входы первого суммирующего усилителя, с выхода которого сигнал поступает на первый нормирующий усилитель,
в свою очередь, первая и вторая выходные обмотки катушки линейного дифференциального трансформатора горизонтального наведения электрически соединены, соответственно, с третьим и четверым выпрямителями, которые, в свою очередь, электрически соединены, соответственно, с третьим и четверым фильтром, сигналы с которых поступают, соответственно, на первый и второй входы второго суммирующего усилителя, с выхода которого сигнал поступает на второй нормирующий усилитель,
при этом выходной сигнал первого нормирующего усилителя поступает на первый вход модуля аналого-цифрового преобразования, а выходной сигнал второго нормирующего усилителя поступает на второй вход модуля аналого-цифрового преобразования, выходной сигнал модуля аналого-цифрового преобразования поступает в модуль вычислительного устройства механической характеристики выходного сигнала от угла поворота пульта наведения, который электрически соединен с постоянным запоминающим устройством и формирователем сигналов последовательной шины канала типа CAN, который, в свою очередь, электрически соединен с объектом военного назначения,
в свою очередь, тактовый генератор электрически соединен с генератором частоты, который соединен с первым входом формирующего усилителя переменного напряжения,
при этом модуль питания пульта наведения, с одной стороны, электрически соединен с +27 В от бортовой сети объекта военного назначения, с другой стороны, первый выход модуля питания пульта наведения соединен со вторым входом формирующего усилителя переменного напряжения, а второй выход модуля питания пульта наведения соединен с контроллером,
в свою очередь, блок коммутации электрически соединен с модулем ввода-вывода.
| Устройство для активного вентилирования зерна в складах | 1959 |
|
SU127888A1 |
| СПОСОБ ДЛЯ ПЕРЕДАЧИ УПРАВЛЯЮЩЕЙ ИНФОРМАЦИИ, СЕТЕВОЕ УСТРОЙСТВО И ТЕРМИНАЛЬНОЕ УСТРОЙСТВО | 2017 |
|
RU2749837C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ПОЛНОЙ ПРОДОЛЬНОЙ СТЕРНОТОМИИ | 2001 |
|
RU2195197C1 |

