Предлагаемое изобретение относится к военной технике, а именно к высокоточному управляемому вооружению, устанавливаемому на ударных вертолетах.
В России и за рубежом придается большое значение ударным вертолетам, обеспечивающим эффективную огневую поддержку сухопутным войскам благодаря своей мобильности, маневренности и возможности быстрого сосредоточения на требуемых участках боевых операций. Для повышения их боевого могущества в борьбе с танками и другой бронированной техникой они оснащаются противотанковым управляемым вооружением (ПТУВ). Например, противотанковые комплексы «Штурм» и «Атака» на вертолетах Ми-28 и Ка-52, «Вихрь» на вертолетах Ка-50 и Ка-52 (Россия), «Hot» на вертолетах Tiger и Во-105 (Франция), «Tow» и «Hellfire» на вертолетах FH-1G и АН-64 (США), «ZT-35 Ingwe» на вертолете CSH-2 Rooivolk (ЮАР), «Barier» на вертолете Ми-24 (Украина).
Система управления ракетами приведенных выше комплексов ПТУВ полуавтоматическая и представляет собой либо систему телеориентирования ракеты в информационном поле луча лазера («Штурм», «Атака», «Вихрь», «ZT-35 Ingwe», «Barier»), либо командную систему с оптическим пеленгатором ракеты и передачей команд управления на ракету по радиоканалу или лучу лазера («Hot», «Tow» и «Hellfire»).
Одной из основных тактико-технических характеристик ПТУВ, установленного на вертолете, является максимальная дальность стрельбы. Увеличение максимальной дальности стрельбы управляемого вооружения, устанавливаемого на вертолете, является актуальной задачей, т.к. ее решение, в одних случаях позволит обеспечить выполнение вертолетом боевой задачи, не заходя в зону противодействия противовоздушной обороны (ПВО) противника, в других случаях позволяет существенно уменьшить время нахождения в зоне возможного противодействия средств ПВО. Величина максимальной дальности управляемого полета ракеты зависит от величины располагаемой перегрузки ракеты на конечном участке траектории, величина которой для обеспечения высокоточного наведения ракеты на цель должна быть не менее 1,2-1,5 g. Учитывая, что располагаемая перегрузка пропорциональна скорости полета ракеты, одним из способов увеличения максимальной дальности стрельбы является увеличение скорости полета ракеты.
Увеличения максимальной дальности полета для ракеты, управляемой по лучу лазера, на активном (с работающим маршевым двигателем) и пассивном участках траектории до окончания полета снаряда, добиваются способом, представленным в патенте на изобретение РФ №2275582 за счет изменения времени задержки включения маршевого двигателя ракеты в зависимости от условий стрельбы с целью увеличения скорости полета ракеты на конечном участке траектории.
Недостатком указанного способа является то, что при реализации его требуется доработка конструкции ракеты или ее соответствующих элементов.
В качестве прототипа заявленного решения нами выбран способ стрельбы телеориентируемыми в луче лазера ракетами с вертолета, описанный в патенте на изобретение РФ №2351508.
Работа описанного вертолетного комплекса заключается в способе стрельбы телеориентируемыми в луче лазера ракетами включающим наведение прицельной марки прибора наведения вертолета и связанных с ней осей лазерного луча и лазерного дальномера на цель, измерение дальности до цели и сравнение ее с разрешенной дальностью, и при дальности до цели меньшей разрешенной дальности осуществляют маневр вертолета по ориентированию продольной оси пускового контейнера ракеты относительно оси лазерного луча под заданным углом и производят пуск ракеты.
При этом пилот вертолета подает с пульта управления команды на приводы наведения обзорно-прицельной системы (ОПС) и осуществляет наведение линии визирования прицела по азимуту и углу места, и на экране видеомонитора воспроизводится обозреваемое прицелом пространство. Обнаружив и распознав цели по экрану монитора, пилот наводит прицельную марку на приоритетную цель и переводит слежение линии визирования прицела за целью в автоматический режим с помощью автомата сопровождения целей, который управляет приводами наведения ОПС на основе обработки сигналов изображения цели с прицела по контрастно-корреляционному методу. На видеомонитор выводится информация о дальности до цели и параметрах движения вертолета. Сигналы, пропорциональные углам и угловым скоростям линии визирования с датчиков углов поворота ОПС, поступают на вход вычислителя, на второй вход которого подаются сигналы с датчиков параметров движения вертолета (скорость, высота полета, углы курса, тангажа, крена и др.). Вычислитель в соответствии с поступающими сигналами по определенным алгоритмам вырабатывает сигналы управления приводами наведения подъемно-поворотной пусковой установки, и команды коррекции траектории полета ракеты, пропорциональные угловой скорости линии визирования цели, поступающие на вход лазерно-лучевого блока. Приводы наведения отрабатывают поступающие сигналы управления, обеспечивая заданную угловую ориентацию пусковой установки с ракетами относительно линии визирования цели в вертикальной плоскости. При условии устойчивого сопровождения цели телеавтоматом и дальности до цели, меньшей или равной максимально возможной, пилот маневром вертолета ориентирует продольную ось пускового контейнера относительно линии визирования цели (и съюстированной с ней оси лазерного луча) под заданным углом, после чего с пульта подает команду на запуск стартово-маршевого двигателя ракеты.
Недостатком описанного способа является ограничение максимальной дальности стрельбы управляемыми ракетами с вертолета по наземным целям.
Задачей, решаемой данным изобретением, является увеличение максимальной дальности стрельбы штатной ракетой с ударного вертолета.
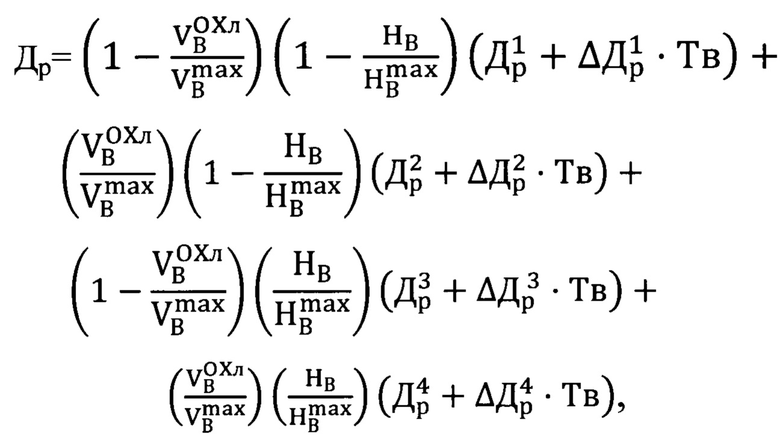
Технический результат достигается за счет способа стрельбы телеориентируемыми в луче лазера ракетами с вертолета, который включает наведение прицельной марки прибора наведения вертолета и связанных с ней осей лазерного луча и лазерного дальномера на цель, измерение дальности до цели и сравнение ее с разрешенной дальностью, и при дальности до цели, меньшей разрешенной дальности, осуществляют маневр вертолета по ориентированию продольной оси пускового контейнера ракеты относительно оси лазерного луча под заданным углом и производят пуск ракеты, при этом новым является то, что при дальности до цели большей разрешенной дальности осуществляют набор высоты полета вертолета, а при высоте, превышающей максимально допустимую, увеличивают скорость вертолета в направлении цели, а разрешенную дальность до цели в процессе набора высоты вертолетом и скорости вертолета определяют по зависимости:
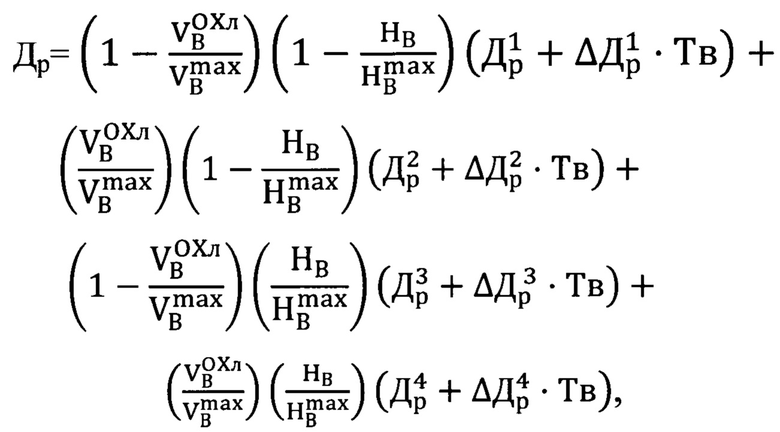
где:
 - проекция скорости вертолета VB на ось ОХЛ лучевой системы координат, м/с;
- проекция скорости вертолета VB на ось ОХЛ лучевой системы координат, м/с;
 - максимальная допустимая скорость вертолета, м/с;
- максимальная допустимая скорость вертолета, м/с;
НB - высота вертолета над целью, м;
 - максимальная допустимая высота вертолета над целью, м;
- максимальная допустимая высота вертолета над целью, м;
Тв - текущая температура воздуха, °С;
 - разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной высоте цели, и при проекции скорости вертолета на ось ОХ, равной 0, м,
- разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной высоте цели, и при проекции скорости вертолета на ось ОХ, равной 0, м,
 - разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной высоте цели, и при проекции скорости вертолета на ось ОХ, равной максимально допустимой скорости вертолета, м,
- разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной высоте цели, и при проекции скорости вертолета на ось ОХ, равной максимально допустимой скорости вертолета, м,
 - разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной максимально допустимой высоте вертолета над целью, и при проекции скорости вертолета на ось ОХ, равной 0, м,
- разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной максимально допустимой высоте вертолета над целью, и при проекции скорости вертолета на ось ОХ, равной 0, м,
 - разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной максимально допустимой высоте вертолета над целью, и при проекции скорости вертолета на ось ОХ, равной максимально допустимой скорости вертолета, м,
- разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной максимально допустимой высоте вертолета над целью, и при проекции скорости вертолета на ось ОХ, равной максимально допустимой скорости вертолета, м,
 - поправки к разрешенным дальностям
- поправки к разрешенным дальностям 
 соответственно, учитывающие текущую температуру воздуха, м/с.
соответственно, учитывающие текущую температуру воздуха, м/с.
Предлагаемый способ стрельбы осуществляется следующим образом. При дальности до цели, большей разрешенной, осуществляют набор высоты полета вертолета НB, а при высоте, превышающей максимально допустимую, увеличивают скорость вертолета в направлении цели. Этот маневр вертолета позволяет получить большую скорость ракеты на траектории наведения за счет того, что указанная траектория наведения проходит, с одной стороны, в более разреженных слоях атмосферы, где ракета имеет меньшее лобовое сопротивление, с другой стороны, при увеличившемся в процессе выполнения предлагаемого маневра вертолета перепаде высот между вертолетом и целью ускорение от действия силы тяжести, приложенное к ракете, имеет составляющую g×sin εЛ, направленную вдоль линии визирования на цель, что также увеличивает скорость ракеты.
Входящие в данную зависимость разрешенные дальности  и поправки к ним
и поправки к ним  учитывающие температуру воздуха, определяют методом математического моделирования динамики контура управления ракетой при соответствующих высоте и скорости полета вертолета при ТВ=0°С.
учитывающие температуру воздуха, определяют методом математического моделирования динамики контура управления ракетой при соответствующих высоте и скорости полета вертолета при ТВ=0°С.
Проекция скорости вертолета на ось ОХл лучевой системы координат VВОХл определяется по формуле:

где VB - скорость вертолета, м/с,
εЛ - угол места цели, рад.
Проведенные испытания ПТУВ, использующий данный способ подтвердили возможность увеличения максимальной дальности стрельбы в зависимости от условий с 8000 м до 10600…11100 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ ОДНОВРЕМЕННОГО НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМЫХ В ЛУЧЕ УПРАВЛЕНИЯ РАКЕТ (ВАРИАНТЫ) И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2479818C1 |
| Способ стрельбы ракетой, управляемой по лучу лазера | 2018 |
|
RU2702458C1 |
| СПОСОБ СТРЕЛЬБЫ РАКЕТОЙ, УПРАВЛЯЕМОЙ ПО ЛУЧУ ЛАЗЕРА | 2012 |
|
RU2516383C1 |
| Способ наведения управляемого снаряда, телеориентируемого в луче лазера (варианты) | 2015 |
|
RU2612054C1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА РАКЕТЫ С ВЕРТОЛЕТА | 1995 |
|
RU2087831C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
Предлагаемое изобретение относится к военной технике, а именно к высокоточному управляемому вооружению, устанавливаемому на ударных вертолетах. Способ стрельбы телеориентируемыми в луче лазера ракетами с вертолета, который включает наведение прицельной марки прибора наведения и связанных с ней осей лазерного луча и лазерного дальномера на цель, измерение дальности до цели и сравнение ее с разрешенной дальностью, при дальности до цели меньшей разрешенной дальности осуществляют маневр вертолета по ориентированию продольной оси пускового контейнера ракеты относительно оси лазерного луча под заданным углом и производят пуск ракеты. Далее при дальности до цели большей разрешенной дальности осуществляют набор высоты полета вертолета, а при высоте, превышающей максимально допустимую увеличивают скорость вертолета в направлении цели. При этом разрешенную дальность до цели в процессе набора высоты вертолетом и скорости вертолета определяют по проекция скорости вертолета на ось лучевой системы координат; максимальной допустимой скорость; высоте над целью; максимальной допустимой высоте; разрешенной дальности для температуры воздуха 0°С, поправкам к разрешенным дальностям, учитывающим текущую температуру воздуха. Технический результат - увеличение максимальной дальности стрельбы ракетой с ударного вертолета.
Способ стрельбы телеориентируемыми в луче лазера ракетами с вертолета, включающий наведение прицельной марки прибора наведения вертолета и связанных с ней осей лазерного луча и лазерного дальномера на цель, измерение дальности до цели и сравнение ее с разрешенной дальностью, и при дальности до цели, меньшей разрешенной дальности, осуществляют маневр вертолета по ориентированию продольной оси пускового контейнера ракеты относительно оси лазерного луча под заданным углом и производят пуск ракеты, отличающийся тем, что при дальности до цели, большей разрешенной дальности, осуществляют набор высоты полета вертолета, а при высоте, превышающей максимально допустимую, увеличивают скорость вертолета в направлении цели, а разрешенную дальность до цели в процессе набора высоты вертолетом и скорости вертолета определяют по зависимости:
где:
 - проекция скорости вертолета VB на ось ОХЛ лучевой системы координат, м/с;
- проекция скорости вертолета VB на ось ОХЛ лучевой системы координат, м/с;
 - максимальная допустимая скорость вертолета, м/с;
- максимальная допустимая скорость вертолета, м/с;
НВ - высота вертолета над целью, м;
 - максимальная допустимая высота вертолета над целью, м;
- максимальная допустимая высота вертолета над целью, м;
ТВ - текущая температура воздуха, °С;
 - разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной высоте цели, и при проекции скорости вертолета на ось ОХ, равной 0, м,
- разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной высоте цели, и при проекции скорости вертолета на ось ОХ, равной 0, м,
 - разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной высоте цели, и при проекции скорости вертолета на ось ОХ, равной максимально допустимой скорости вертолета, м,
- разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной высоте цели, и при проекции скорости вертолета на ось ОХ, равной максимально допустимой скорости вертолета, м,
 - разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной максимально допустимой высоте вертолета над целью, и при проекции скорости вертолета на ось ОХ, равной 0, м,
- разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной максимально допустимой высоте вертолета над целью, и при проекции скорости вертолета на ось ОХ, равной 0, м,
 - разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной максимально допустимой высоте вертолета над целью, и при проекции скорости вертолета на ось ОХ, равной максимально допустимой скорости вертолета, м,
- разрешенная дальность для температуры воздуха, равной 0°С, при высоте вертолета, равной максимально допустимой высоте вертолета над целью, и при проекции скорости вертолета на ось ОХ, равной максимально допустимой скорости вертолета, м,
 - поправки к разрешенным дальностям
- поправки к разрешенным дальностям 
 соответственно, учитывающие текущую температуру воздуха, м/с.
соответственно, учитывающие текущую температуру воздуха, м/с.
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ОРУЖИЯ БЛИЖНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2351508C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2007 |
|
RU2362106C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| US 6568627 B1, 27.05.2003. | |||

