Изобретение относится к радиоприемным устройствам с квадратурной цифровой обработкой сигналов и может быть использовано в радиолокационных станциях.
При построении современных радиоприемных устройств с квадратурной цифровой обработкой сигнала в составе РЛС, комплексов имитирующих многоцелевую обстановку, имитаторов радиолокационных целей и других устройств, особо актуальным является обеспечение линейной работы приемного тракта. Нарушение линейности приводит к искажению принятого сигнала и, как следствие, ухудшению рабочих характеристик всего устройства. В случае РЛС это вероятность правильного обнаружения, способность обнаруживать слабый сигнал на фоне сильных помех, разрешающая способность по наклонной дальности и азимуту.
Кроме того, в радиоприемных устройствах с цифровой обработкой нелинейные искажения в аналоговом и цифровом тракте приведут к появлению побочных гармонических составляющих в рабочей полосе сигнала, устранить которые будет практически невозможно.
Наиболее узким местом с точки зрения динамического диапазона в радиоприемных устройствах с цифровой обработкой квадратур является аналого-цифровой преобразователь. Как правило, это устройство характеризуется более узким динамическим диапазоном входных сигналов по сравнению с другими элементами приемника. Это связано с разрядностью АЦП. Чем меньше величина разрядности, тем меньше динамический диапазон входных сигналов, который АЦП может передать без искажений. В то же время, разрядность связана с частотой дискретизации.
Если принять, что АЦП оцифровывает как положительную, так и отрицательную полуволну входного сигнала, то его динамический диапазон (в дБ) будет равен:

где Pmax.АЦП/Pmin.АЦП - максимальное/минимальное допустимое значение мощности сигнала на входе АЦП, Umax.АЦП/Umin.АЦП - максимальное/минимальное допустимое значение напряжения сигнала на входе АЦП, N - разрядность АЦП. Так 8-разрядный АЦП теоретически будет иметь динамический диапазон по мощности 42,11 дБ. На практике чаще всего эта цифра будет меньше с учетом влияния собственных шумов и других факторов. В то же время для современных радиоприемных устройств наблюдается тенденция по расширению мгновенной полосы обработки сигнала за счет использования сложномодулированных сигналов. Так РЛС с синтезированной апертурой антенны обрабатывает сигналы с полосой до 1 ГГц и выше. Для обработки сигналов с такой полосой необходимо, чтобы частота дискретизации используемых АЦП по теореме Котельникова-Найквиста превышала верхнюю частоту в спектре полезного сигнала промежуточной частоты как минимум в два раза. За счет применения квадратурной обработки частота дискретизации снижается в два раза. Но в то же время чем выше частота дискретизации, тем меньше разрядность АЦП. Так АЦП с частотами преобразования 1 ГГц и выше, как правило, имеют разрядность не более 8-10, а это накладывает ограничения на динамический диапазон обрабатываемых сигналов. Таким образом, задача расширения динамического диапазона входных сигналов для радиоприемных устройств с цифровой обработкой является актуальной и требует принятия специальных мер.
Известны аналоги радиоприемного устройства с цифровыми выходами и расширенным динамическим диапазоном [1], [2].
Аналог [1] (радиоприемное устройство когерентной РЛС) представляет собой систему из параллельно включенных n-каналов приема сигнала со специально выбранными для каждого приемника векторными смещениями рабочего диапазона и формированием на выходе сумм одноименных частей огибающей выходного сигнала параллельных приемников. Недостатком устройства является незначительный динамический диапазон отдельного когерентного приемника, и, как следствие, требуется большое количество параллельных каналов обработки для получения требуемой линейности всего приемного тракта. Большое количество каналов приводит к очень сложной и громоздкой технической реализации устройства, а также возникают искажения выходного сигнала из-за невозможности идеально состыковать друг с другом все n приемных каналов. Также гетеродин и фазовращатель имеют повышенный уровень побочных составляющих в спектре выходного сигнала фазовращателя, что приводит к ошибке корректировки квадратур применяемых сигналов.
Аналог [2] (приемник когерентной РЛС с большим динамическим диапазоном) также представляет собой многоканальную систему, состоящую из n-каналов. Каждый канал состоит из аналогового сумматора, резонансных усилителей с управляемым коэффициентом передачи, двух синхронных преобразователей частоты, фильтров нижних частот и АЦП. Выходные квадратурные цифровые сигналы от каждого из каналов складываются в цифровых сумматорах. Данный аналог, в отличие от предыдущего, лишен побочных составляющих в спектре выходного сигнала и позволяет вести когерентную обработку фазо-кодоманипулированных сигналов. Недостатком является повышенная сложность технической реализации многоканальной системы, влияние разброса электрических параметров элементов схемы на качество результирующего сигнала и, как следствие, повышенные требования к элементам схемы, повышенный уровень шумов квантования в результирующем сигнале из-за использования большого количества АЦП, искажения выходных квадратурных сигналов вследствие неидеальной сшивки динамического диапазона из множества отдельных.
Наиболее близким по технической сущности к заявляемому радиоприемному устройству с цифровыми выходами и расширенным динамическим диапазоном является радиолокационный приемник сложных сигналов [3], принятый в качестве прототипа.
Радиолокационный приемник содержит регулируемый входной усилитель, два параллельно соединенных с ним квадратурных канала, каждый из которых состоит из последовательно соединенных фазового детектора, управляемые входы которого подключены к источнику квадратурных колебаний, АЦП, устройства вычитания постоянной составляющей (блоки сравнения), фильтры нижних частот. Фазовые детекторы соединены с источником квадратурных колебаний, выход которого также соединен с хронизатором и фильтрами нижних частот. Приемник также содержит блок хранения констант и блок автоматической регулировки усиления (АРУ), выход которого соединен с управляемым входом усилителя. Выходной сигнал поступает в блок селекции движущихся целей.
Сущность данного известного решения состоит в том, что между выходом АЦП и входом блока селекции включена схема адаптивного вычитания постоянной составляющей и параллельно ее выходу подключен блок АРУ, выход которого управляет регулируемым усилителем. Устройство АРУ выполнено из последовательно соединенных детектора, блока сравнения с фиксированным пороговым уровнем, фильтра низких частот и цифроаналогового преобразователя.
В этом устройстве входной сигнал поступает на регулируемый усилитель, смещается на промежуточную частоту с помощью двух фазовых детекторов с формированием двух квадратурных сигналов (имеющих сдвиг по фазе друг относительно друга 90°), которые преобразуются в цифровую форму двумя аналогово-цифровыми преобразователями, выполняется компенсация постоянной и флюктуационной составляющей на выходе каждой квадратур, осуществляется регулировка коэффициентом передачи усилителя в соответствии с результатом оценки среднеквадратичного значения случайного процесса на выходе блоков компенсации постоянной составляющей.
Однако данное устройство прототип [3] имеет свои недостатки. Так схема компенсации постоянной составляющей осуществляет устранение постоянной составляющей, вызванной как собственными шумами фазовых детекторов и АЦП, так и полезным сигналом, что в ряде случаев является недопустимым, поскольку нулевые частоты в спектре сигнала также могут нести полезную информацию. Кроме того, из-за регулировки коэффициента передачи входного усилителя радиоприемного устройства происходит сжатие динамического диапазона сигнала на выходе всего устройства. При этом теряется информация об уровне сигнала, поскольку нет обратной связи по выходу. Использование аналогового управляющего сигнала для регулировки коэффициента передачи регулируемого усилителя приводит к повышению нестабильности работы схемы АРУ при внешних воздействующих факторах.
Техническим результатом (задачей) предлагаемого решения является расширение динамического диапазона по входу устройства при одновременном сохранении информации об уровне сигнала на квадратурных цифровых выходах радиоприемного устройства и передача нулевых частот в спектре полезного сигнала при одновременной компенсации паразитной постоянной составляющей на выходе АЦП.
Технический результат достигается за счет того, что в состав приемника с цифровым выходом вводится устройство формирования цифрового управляющего сигнала, обеспечивающего управление коэффициентом усиления регулируемого усилителя исходя из информации об уровне выходного сигнала АЦП. По цифровым квадратурным выходам радиоприемного устройства вводится устройство восстановления динамического диапазона, чтобы сохранить информацию об уровне сигнала. При этом достигаются высокие требования в части линейности работы аналого-цифрового преобразователя.
В каждом квадратурном канале радиоприемного устройства с цифровыми выходами, содержащем последовательно соединенные фазовые детекторы и АЦП, между выходом детекторов и АЦП включены буфер и схема компенсации смещения нуля на выходе АЦП. Также параллельно выходам АЦП подключена схема определения уровня сигнала промежуточной частоты, устанавливающая коэффициент передачи входного регулируемого усилителя.
Устройство компенсации смещения нуля на выходе АЦП состоит из схемы вычитания постоянной составляющей (из полезного сигнала) и блока хранения констант. Выходной сигнал АЦП каждого из квадратурных каналов поступает через буферы на вход схемы вычитания константы, на второй вход этой схемы подается цифровой код, считываемый из блока хранения констант.
Блок автоматической регулировки усиления (АРУ) включает схемы сравнения сигнала с верхним и нижним пороговым уровнем, выход каждой из этих схем подключен к входу устройства формирования цифрового управляющего сигнала, осуществляющего установку коэффициента передачи регулируемого усилителя и схемы восстановления динамического диапазона на выходах квадратурных каналов приемника.
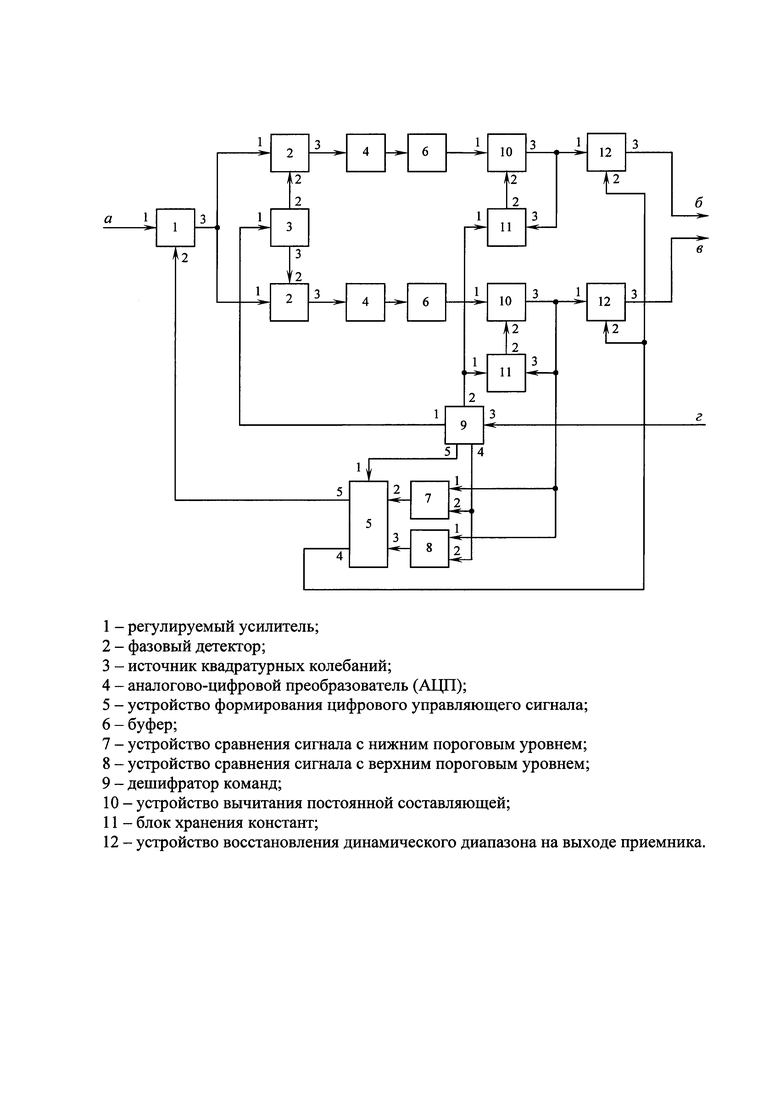
Приведена структурная схема предложенного радиоприемного устройства с цифровыми выходами и расширенным динамическим диапазоном. Приемник содержит регулируемый усилитель 1, фазовый детектор 2, источник квадратурных колебаний 3, аналого-цифровой преобразователь 4, устройство формирования цифрового управляющего сигнала 5, буфер 6, устройство сравнения сигнала с нижним пороговым уровнем 7, устройство сравнения сигнала с верхним пороговым уровнем 8, дешифратор команд 9, устройство вычитания постоянной составляющей 10, блок хранения констант 11 и устройство восстановления динамического диапазона на выходе приемника 12.
Принцип работы устройства заключается в следующем. Входной сигнал поступает на вход 1 регулируемого усилителя 1 с цифровой электрической регулировкой. Усилитель с цифровой регулировкой усиления состоит из декодера (дешифратора) команд, преобразующего цифровой управляющий сигнал в сигнал управления коэффициентом передачи, и регулируемого усилителя.
Использование данного устройства позволяет осуществлять регулировку коэффициента передачи приемного тракта таким образом, чтобы сигнал на входе АЦП 4 находился в линейной части его динамического диапазона. Обозначим сигнал на входе 1 перестраиваемого СВЧ усилителя 1 как Sвx(t).
Величина  определяет динамический диапазон входных сигналов, где Рmaх/Pmin - максимальная/минимальная мощность сигнала Sвx(t). Сигнал на выходе усилителя с учетом его коэффициента передачи Кусил будет равен Kусил.⋅Sвх(t). Основной критерий при выборе усилителя - максимальная скорость перестройки коэффициента передачи и линейная работа во всем динамическом диапазоне ΔPвх входных сигналов. Для простоты положим, что в начальный момент времени работы изделия коэффициент передачи усилителя 1 равен максимальной величине Кусил.макс.
определяет динамический диапазон входных сигналов, где Рmaх/Pmin - максимальная/минимальная мощность сигнала Sвx(t). Сигнал на выходе усилителя с учетом его коэффициента передачи Кусил будет равен Kусил.⋅Sвх(t). Основной критерий при выборе усилителя - максимальная скорость перестройки коэффициента передачи и линейная работа во всем динамическом диапазоне ΔPвх входных сигналов. Для простоты положим, что в начальный момент времени работы изделия коэффициент передачи усилителя 1 равен максимальной величине Кусил.макс.
Следующим элементом в приемном тракте, подключаемым к выходу 3 регулируемого усилителя, является фазовый детектор 2. Данное устройство обеспечивает перенос спектра полезного сигнала Kусил.⋅Sвх(t) на промежуточную частоту (далее ПЧ). Формирование двух квадратурных каналов обработки сигнала обеспечивается за счет того, что в схеме используются два фазовых детектора. При этом выходной сигнал усилителя подается одновременно на входы 1 фазовых детекторов, а сигнал гетеродина подается на входы 2 фазовых детекторов с выхода 2 и 3 источника квадратурных колебаний 3. Источник квадратурных колебаний 3 представляет собой генератор гармонических колебаний, выход 2 которого идет напрямую на гетеродинный вход 2 фазового детектора, а выход 3 является выходом фазовращателя на 90°, через который проходит сигнал генератора и далее поступает на вход 2 второго фазового детектора.
В качестве генератора гармонических колебаний используется перестраиваемый синтезатор частоты с фазовой автоподстройкой частоты (далее ФАПЧ). Конструктивно он может быть выполнен в виде отдельной интегральной схемы. Наличие такого синтезатора позволяет установить требуемую частоту гетеродина, с точностью до нескольких кГц, причем данная процедура выполняется путем программной загрузки управляющей информации в рабочие регистры синтезатора. Малый уровень фазовых шумов за счет применения системы ФАПЧ обеспечивает выполнение условия когерентности за время обработки сигнала. Установка требуемой частоты выполняется посредством загрузки управляющей информации в рабочие регистры синтезатора через управляющий вход 1 источника квадратурных колебаний. Управляющая информация поступает с выхода 1 дешифратора команд.
Выбор частоты синтезатора определяется мгновенной рабочей полосой сигнала. Если обозначить нижнюю границу рабочего диапазона как Fниж., а верхнюю как Fвepx., то частота синтезатора должна быть равна Fсинт.=(Fниж.+Fвepx.)/2, т.е. центральной частоте рабочего диапазона. Ширина рабочей полосы сигнала при этом ΔF=Fвepx. - Fниж.. Тогда полоса промежуточной частоты после преобразования по частоте вниз фазовым детектором для указанной выше частоты гетеродина будет составлять ΔFПЧ=0…±ΔF/2 для каждой из квадратур.
Преобразование аналогового сигнала с выхода фазового детектора в цифровой выполняет АЦП. При этом частота дискретизации должна превышать верхнюю границу полосы ПЧ ΔF/2 как минимум в 2 раза.
Далее цифровой сигнал промежуточной частоты с выхода АЦП поступает на вход буферов 6, которые необходимы для сопряжения частоты дискретизации АЦП с тактовой частотой обработки сигнала в радиоприемном устройстве. Данные элементы осуществляют прием цифрового сигнала от АЦП, его накопление и передачу на более низкой частоте, но с большей информационной емкостью, на вход 1 устройства вычитания константы из полезного сигнала.
Выходной сигнал буферов проходит через схему компенсации смещения нуля на выходе АЦП, состоящую из элементов 10 и 11, поступает на устройство определения уровня сигнала промежуточной частоты и устанавливающее коэффициент передачи входного регулируемого усилителя и устройства восстановления динамического диапазона на выходе приемника.
Дешифратор команд 9 представляет собой элемент, выполняющий операцию приема информации от внешнего управляющего устройства, декодирование принятых посылок и их дальнейшую адресацию и передачу по информационным шинам к основным управляемым элементам схемы: источник квадратурных колебаний, блоки хранения констант, устройства сравнения сигнала с нижним/верхним пороговым уровнем и устройство формирования цифрового управляющего сигнала.
В данной реализации радиоприемного устройства с цифровыми выходами предусматривается два режима работы. В зависимости от того, какой используется режим работы, различается алгоритм функционирования схемы компенсации смещения нуля на выходе АЦП, состоящей из блоков 10 и 11. Первый режим -калибровка. В данном режиме после подачи напряжения питания на все узлы устройства, от внешнего устройства управления через интерфейсный вход «г» на вход 3 дешифратора 9 поступают команды для предварительной настройки элементов схемы. Это необходимо для устранения дополнительных источников внесения ошибки в смещение выходного сигнала АЦП. Для этого регулируемый СВЧ усилитель 1 с помощью устройства формирования цифрового управляющего сигнала устанавливается в состояние минимального коэффициента передачи, а перестраиваемый синтезатор частоты источника квадратурных колебаний 3 не формирует гетеродинный сигнал для фазовых детекторов 2. При этом на входах АЦП 4 будет присутствовать постоянное паразитное напряжение, вызванное собственными шумами радиоприемного устройства, погрешностью установки опорного напряжения АЦП и амплитудным разбалансом квадратурных сигналов. Обозначим ΔSАЦП.ВЫХ.1(t) и ΔSАЦП.BЫХ.2(t) как паразитное ненулевое смещение на выходе АЦП первого и второго квадратурного каналов, соответственно. Данные ошибки без искажений пройдут через буферы 6 и попадают на вход 1 устройств вычитания постоянной составляющей 10.
Перед началом калибровки после предварительной настройки элементов схемы с выхода 2 блока хранения констант 11 поступает постоянная величина, равная 0. При этом устройство 10 выполняет операцию вычитания из входного сигнала, приходящего на вход 1 с выхода буфера, постоянной величины равной 0, считываемой из блока хранения констант. Таким образом, входной сигнал, который представляет собой ΔSАЦП.ВЫХ.1(t) (или ΔSАЦП.BЫХ.2(t) в зависимости от канала) проходит на выход 3 устройства 10 без изменений. После поступления команды калибровки от внешнего устройства управления, дешифратор 9 формирует команду сохранения, поступающую на вход 1 блока хранения констант. При этом в течение определенного времени выполняется накопление с усреднением в блок хранения констант величины ΔSАЦП.ВЫХ.1(t) (ΔSАЦП.BЫХ.2(t) для второго канала обработки). По сути в блок хранения констант заносится величина  где n - количество усреднений, ΔSАЦП.ВЫХ.1(ti) - отсчет сигнала в момент времени ti. Таким образом, Sконст. представляет собой математическое ожидание случайного процесса ΔSАЦП.ВЫХ..
где n - количество усреднений, ΔSАЦП.ВЫХ.1(ti) - отсчет сигнала в момент времени ti. Таким образом, Sконст. представляет собой математическое ожидание случайного процесса ΔSАЦП.ВЫХ..
После окончания калибровки устройство вычитания постоянной составляющей 10 отнимает от входного сигнала SБУФ(t), поступающего на вход 1 с выхода буфера 6, константную величину Sконст., приходящую со 2 выхода блока хранения констант 11. Выходной сигнал устройства вычитания независимо от знака полезного сигнала и величины Sконст. будет равен SВых.выч(t) = SБУФ(t)-Sконст. Поскольку до начала второго режима работы SБУФ(t) равен величине ΔS АЦП.ВЫХ.(t), то выходной сигнал будет равен SВых.выч(t) = SБУФ(t)-Sконст≈0.
Второй режим работы радиоприемного устройства - рабочий режим. В этом режиме внешнее устройство управления через вход «г» передает команды инициализации для основных блоков схемы. При этом с помощью дешифратора команд устанавливается коэффициент передачи регулируемого усилителя в максимальное значение, задается частота источника квадратурных колебаний в соответствии с рабочим диапазоном, передается значение порога для двух устройств сравнения сигнала с нижним/верхним пороговым уровнем, устанавливается время, в течение которого происходит определение уровня сигнала на выходе АЦП, коэффициент передачи устройства восстановления динамического диапазона на выходе приемника устанавливается в минимальное значение.
Запись цифрового кода в блок хранения констант осуществляется в момент калибровки устройства и производится с выхода схемы вычитания.
В рабочем режиме входной полезный сигнал, пройдя через элементы СВЧ тракта, а также АЦП и буферы попадает на вход устройства вычитания. Из сигнала вычитается паразитное ненулевое смещение Sконст., которое считывается из блока хранения констант и которое было зафиксировано в режиме калибровки радиоприемного устройства. Далее полезный сигнал с выхода 3 устройства вычитания 10 одного из квадратурных каналов поступает на входы схемы АРУ, состоящей из устройств сравнения сигнала с нижним и верхним пороговым уровнем, а также устройства формирования цифрового управляющего сигнала. Величина порогов Dнижн и Dвеpx устройств 7 и 8 задается с помощью дешифратора команд 9 через входы 2. Устройство 7 выполняет операцию взятия модуля сигнала SВых.выч(t) и сравнивает |SВых.выч(t)| с нижним пороговым уровнем Dнижн. Если |SВых.выч(t)| < Dнижн. то вырабатывается логическая «1», в противном случае - «0». В устройстве 8 осуществляется операция взятия модуля сигнала SВых.выч(t) и сравнение верхнего порога DBepx. с сигналом |SВых.выч(t)|. Если |SВых.выч(t)| > Dвepx., то устройство 8 вырабатывает в данный момент времени логическую «1», в противном случае - «0». Выбор величины порогов определяется исходя из следующих условий:
1) Dвepx. должен быть меньше на 20% максимально возможного значения на выходе АЦП.
2) Dнижн. должен быть больше на 20% минимально возможного значения на выходе АЦП.
Таким образом, выбор порогов определяется исходя из того, чтобы полезный сигнал находился в середине рабочего диапазона АЦП, не заходя в область переполнения разрядной сетки и шумов квантования.
Устройство 5 выполняет формирование цифрового управляющего сигнала для регулируемого усилителя 1 и устройства восстановления динамического диапазона на выходах приемника в соответствии с информацией, поступающей от устройств сравнения сигнала 7-8. Данный элемент состоит из двух счетчиков, которые подсчитывают количество логических «1» поступающих от устройств 7-8 в течение времени tподсч.. По окончании времени подсчета содержимое счетчиков сравнивается с величинами Nвepx. и Nнижн., которые передаются в устройство 5 через дешифратор команд. Величина t подсч. определяет временной интервал, достаточный для определения уровня сигнала на выходе АЦП, и программно задается также с помощью дешифратора команд.
Величины Nвepx и Nнижн. определяют количество цифровых выборок полезного сигнала, которые должны превысить Dвepx. и Dнижн. в течение времени tподсч., чтобы сработала схема АРУ.
Алгоритм работы устройства 5 следующий:
1) С момента запуска рабочего режима в течение времени tподсч., осуществляется запуск счетчиков, подсчитывающих количество «1» на выходе устройств сравнения 7 и 8.
2) Если после окончания времени t подсч., содержимое счетчика, подсчитывающего «1» на выходе устройства 8, превышает величину Nвepx., то устройство 5 формирует цифровой управляющий сигнал для регулируемого усилителя таким образом, чтобы уменьшить его коэффициент передачи на величину dKP (шаг регулировки коэффициента передачи). При этом для устройств 12 восстановления динамического диапазона на выходе приемника, которые по своей технической реализации представляют собой цифровые регулируемые усилители, формируется цифровой управляющий сигнал, который увеличивает коэффициент передачи цифрового квадратурного канала на величину dKP. Т.е. при сжатии динамического диапазона по входу устройства происходит обратно пропорциональное его расширение по выходам, и информация об уровне сигнала не искажается. В том случае, если текущий коэффициент передачи регулируемого усилителя Кус. меньше величины dKP, то коэффициент передачи устанавливается в минимальное значение Кус.мин..
Если содержимое счетчика, подсчитывающего «1» на выходе устройства 7, превышает величину Nнижн., то устройство 5 формирует цифровой управляющий сигнал для регулируемого усилителя таким образом, чтобы увеличить его коэффициент передачи на величину dKP. При этом для устройств 12 восстановления динамического диапазона на выходе приемника формируется цифровой управляющий сигнал, который уменьшает коэффициент передачи по выходу квадратурных каналов на величину dKP. В том случае, если текущий коэффициент передачи регулируемого усилителя Кус. равен максимальной величине Кус.макс., то коэффициент передачи устанавливается в максимальное значение Кус.макс..
После окончания цикла (длительность tподсч.) измерения уровня полезного сигнала счетчики устройства 5 сбрасываются, при этом цифровые управляющие сигналы для регулируемого усилителя 1 и устройства 12 остаются без изменений.
3) Запускается новый цикл измерений длительностью tподсч..
4) Повторяются действия по п. 2-3 до тех пор, пока не будет остановлена работа радиоприемного устройства.
Диапазон регулировки коэффициента передачи усилителя 1, равный ΔKР=Kус.макс./Kус.мин., определяет основные возможности схемы АРУ по расширению динамического диапазона сигналов на входе АЦП.
Достигаемый технический результат:
Использование регулируемого усилителя 1 и устройства восстановления динамического диапазона на выходе приемника 12 с диапазоном регулировки коэффициента передачи ΔKp позволяет расширить динамический диапазон сигналов на входе АЦП на величину ΔKp без значительного усложнения технической реализации радиоприемного устройства. Схема компенсации смещения нуля на выходе АЦП позволяет повысить точность определения уровня выходного сигнала и передачи полезной постоянной составляющей в спектре квадратурных сигналов промежуточной частоты. Введение цифрового управления коэффициента передачи регулируемого усилителя и устройства восстановления динамического диапазона на выходах радиоприемника улучшает стабильность и точность работы схемы АРУ, кроме того возрастает надежность и высокая повторяемость результатов при серийном производстве.
Этот результат достигается за счет того, что в каждом квадратурном канале радиоприемного устройства с цифровыми выходами, содержащем последовательно соединенные фазовые детекторы и АЦП, между выходом детекторов и АЦП включены буфер и схема компенсации смещения нуля на выходе АЦП, которая запоминает постоянную составляющую в момент калибровки устройства при отсутствии полезного сигнала на входе и вычитает ее из полезного сигнала в процессе работы, а также параллельно выходам АЦП подключена схема определения уровня сигнала промежуточной частоты и устанавливающая коэффициент передачи входного регулируемого усилителя таким образом, чтобы сигнал на входе АЦП не приводил к его перегрузке (переполнению разрядной сетки) и превышал собственные шумы квантования АЦП). Введение по цифровым выходам дополнительного устройства восстановления динамического диапазона позволяет восстановить информацию об уровне сигнала на выходах радиоприемного устройства.
Аналог 1 - «Радиоприемное устройство когерентной РЛС», патент РФ 2189054.
Аналог 2 - «Приемник когерентной РЛС с большим динамическим диапазоном», патент РФ 2231807.
Рабочий прототип 3 - «Радиолокационный приемник сложных сигналов», патент РФ 2033625.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ ПРИЕМНИК СЛОЖНЫХ СИГНАЛОВ | 1991 |
|
RU2033625C1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО ЦИФРОВОЙ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2015 |
|
RU2593928C1 |
| Устройство для цифровой фильтрации на основе дискретного преобразования Фурье | 1990 |
|
SU1795475A1 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ И ИСКЛЮЧЕНИЯ СМЕЩЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ В ПРИЕМНИКЕ С КВАДРАТУРНОЙ ДЕМОДУЛЯЦИЕЙ | 1995 |
|
RU2241304C2 |
| СПОСОБ И УСТРОЙСТВО АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ И ИСКЛЮЧЕНИЯ СМЕЩЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ В ПРИЕМНИКЕ С КВАДРАТУРНОЙ ДЕМОДУЛЯЦИЕЙ | 1995 |
|
RU2156538C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2495449C2 |
| ДЕМОДУЛЯТОР ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2008 |
|
RU2393641C1 |
| ПРИЕМНИК ПРЯМОГО ПРЕОБРАЗОВАНИЯ С КВАДРАТУРНО-ТРЕХФАЗНОЙ АРХИТЕКТУРОЙ, СПОСОБ ПРЯМОГО ПРЕОБРАЗОВАНИЯ СИГНАЛА ПОСРЕДСТВОМ УКАЗАННОГО ПРИЕМНИКА И СПОСОБ УПРАВЛЕНИЯ НАСТРОЙКОЙ УКАЗАННОГО ПРИЕМНИКА | 2013 |
|
RU2542939C1 |
| БЛОК ПРИЕМА И СИНХРОНИЗАЦИИ | 2012 |
|
RU2497148C1 |
| МОНОИМПУЛЬСНАЯ РЛС МИЛЛИМЕТРОВОГО ДИАПАЗОНА | 2015 |
|
RU2600109C1 |
Изобретение относится к радиоприемным устройствам с квадратурной цифровой обработкой сигналов и может быть использовано в радиолокационных станциях. Достигаемый технический результат - расширение динамического диапазона по входу устройства при одновременном сохранении информации об уровне сигнала на квадратурных цифровых выходах радиоприемного устройства и передача нулевых частот в спектре полезного сигнала при одновременной компенсации паразитной постоянной составляющей на выходе аналого-цифрового преобразователя (АЦП). Указанный результат достигается за счет того, что радиоприемное устройство содержит определенным образом соединенные между собой регулируемый усилитель, фазовый детектор, источник квадратурных колебаний, аналого-цифровой преобразователь, устройство формирования цифрового управляющего сигнала, буфер, устройство сравнения сигнала с нижним пороговым уровнем, устройство сравнения сигнала с верхним пороговым уровнем, дешифратор команд, устройство вычитания постоянной составляющей, блок хранения констант и устройство восстановления динамического диапазона на выходе приемника, при этом радиоприемное устройство обеспечивает регулировку коэффициента передачи приемного тракта таким образом, чтобы сигнал на входе АЦП находился в линейной части его динамического диапазона. 1 ил.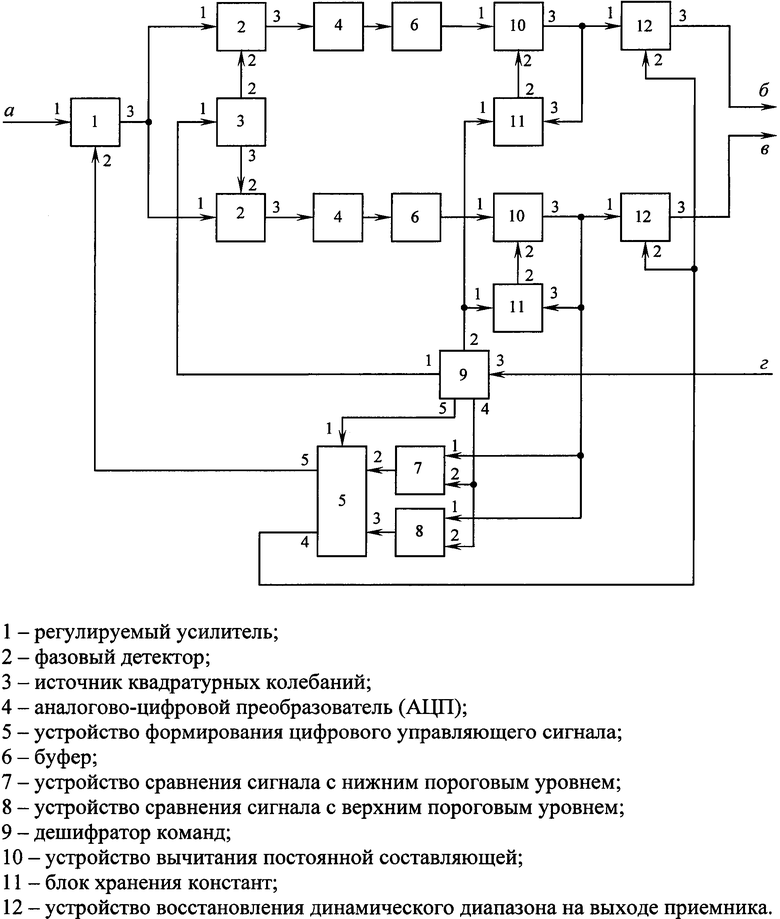
Радиоприемное устройство с цифровыми выходами и расширенным динамическим диапазоном, содержащее регулируемый усилитель, вход которого является входом радиоприемного устройства, два параллельно соединенных квадратурных канала, каждый из которых состоит из последовательно соединенных фазового детектора, аналого-цифрового преобразователя (АЦП) и устройства вычитания постоянной составляющей, при этом вход каждого из фазовых детекторов соединен с выходом регулируемого усилителя, а управляемый вход подключен к источнику квадратурных колебаний, а также содержащее блок автоматической регулировки усиления (АРУ), отличающееся тем, что регулируемый усилитель выполнен с цифровым управлением, в каждый из каналов введен буфер между АЦП и устройством вычитания постоянной составляющей, а также в каждый из каналов введен блок хранения констант, один из входов которого соединен с выходом устройства вычитания постоянной составляющей своего канала, а выход блока хранения констант соединен с вторым входом устройства вычитания постоянной составляющей своего канала, на выходе устройства вычитания постоянной составляющей в каждом канале введено устройство восстановления динамического диапазона, выходы устройств восстановления динамического диапазона являются выходами радиоприемного устройства, в радиоприемное устройство введен также дешифратор команд, связанный с блоком хранения констант в каждом канале и с источником квадратурных колебаний, при этом блок АРУ содержит устройство формирования цифрового управляющего сигнала и два устройства сравнения сигнала с нижним и верхним пороговыми уровнями, выходы устройств сравнения сигнала с нижним и верхним пороговыми уровнями соединены с соответствующими входами устройства формирования цифрового управляющего сигнала, а входы устройств сравнения сигнала с нижним и верхним пороговыми уровнями соединены с выходом устройства вычитания постоянной составляющей одного из каналов, а также с одним из выходов дешифратора команд, первый и второй выходы устройства формирования цифрового управляющего сигнала блока АРУ соединены соответственно с входом регулируемого усилителя и с входом устройств восстановления динамического диапазона обоих каналов, один из входов устройства формирования цифрового управляющего сигнала соединен с соответствующим выходом дешифратора команд, на вход которого принимается информация от внешнего управляющего устройства.
| РАДИОЛОКАЦИОННЫЙ ПРИЕМНИК СЛОЖНЫХ СИГНАЛОВ | 1991 |
|
RU2033625C1 |
| Способ расширения динамического диапазона в радиотехнических системах | 2015 |
|
RU2614345C1 |
| РАДИОЛОКАЦИОННЫЙ ПРИЕМНИК С БОЛЬШИМ ДИНАМИЧЕСКИМ ДИАПАЗОНОМ ПО ИНТЕРМОДУЛЯЦИИ ТРЕТЬЕГО ПОРЯДКА | 2004 |
|
RU2254590C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ РЕГУЛИРОВКИ УСИЛЕНИЯ В ЦИФРОВОМ РАДИОПРИЕМНИКЕ | 1995 |
|
RU2163416C2 |
| US 20140044221 A1, 13.02.2014 | |||
| Способ определения аймалина в лекарственных препаратах | 1988 |
|
SU1603297A1 |
| WO 2006009468 A1, 26.01.2006 | |||
| US 4893316 A, 09.01.1990. | |||

