Изобретение относится к области радиолокации и может быть использовано в радиолокационных станциях (РЛС) кругового обзора в качестве радиолокационного (РЛ) приемника.
Проектирование современных РЛС, требования, предъявляемые к ним, во многом определяют рабочие характеристики РЛ-приемников. Основными из них являются: помехоустойчивость к различным видам помех (активных и пассивных), стабильность параметров всех элементов РЛ-приемника для обеспечения потенциальных точностных характеристик по измерению координат воздушных объектов (ВО), надежность (долговечность) работы РЛ-приемника, простота его обслуживания в период эксплуатации. Для удовлетворения перечисленных требований при проектировании РЛ-приемника обзорной РЛС, кроме выбора соответствующих алгоритмов обработки, существует еще один существенный фактор, который во многом определяет эксплуатационные характеристики РЛС, это выбор соответствующей элементной базы, которая позволяет реализовать технически основные элементы РЛ-приемника.
В настоящее время наиболее перспективной элементной базой является цифровая элементная база. При этом стабильность, надежность, простоту в эксплуатации, высокую повторяемость при серийном производстве РЛ-приемников определяет переход с помощью цифровой элементной базы на дискретные методы обработки сигналов. Применение цифровых методов обработки сигналов не встречает принципиальных затруднений по получению необходимых технических характеристик РЛ-приемника. Как правило, единственным ограничением улучшения рабочих характеристик РЛ-приемника являются его аналоговые элементы. Применение аналоговых элементов для обработки сигналов неизбежно до входа специальных аналогово-цифровых преобразователей (АЦП), которые осуществляют перевод аналоговой информации в цифровую форму.
Наиболее распространенным методом перевода аналоговой информации в цифровую форму является предварительное преобразование принимаемых колебаний с помощью синхронных (фазовых) детекторов на видеочастоту с последующей дискретизацией колебаний по амплитуде и времени. Полная информация о принимаемых колебаниях сохраняется на видеочастоте в том случае, когда число фазовых детекторов не менее двух. При этом на управляемый вход фазовых детекторов должны поступать сдвинутые на π/2 колебания частоты ωo, равной центральной частоте спектра принимаемых колебаний.
При последующей дискретизации принимаемых колебаний в каждом из квадратурных каналов с помощью АЦП необходимо, чтобы в результате преобразования информации в цифровую форму сохранялись количественные характеристики параметров поступающих колебаний.
Строго математически параметры квадратурных колебаний собственного шума приемника обеих квадратур должны быть тождественно равными. Практически вследствие нестабильности аналоговых элементов приемного тракта, а именно: фазовых детекторов и АЦП, точного равенства параметров квадратурных составляющих собственного шума приемника достигнуть не удается из-за наличия "пролазов" гетеродинного напряжения в фазовых детекторах, дрейфа нулевого уровня в АЦП, нелинейности амплитудных характеристик аналоговых элементов, изменения коэффициента передачи аналоговых элементов в диапазоне рабочих температур. Это ухудшает коэффициент шума приемника.
При операции переноса принимаемых колебаний на видеочастоту с помощью фазовых детекторов возникает довольно широкий спектр комбинационных составляющих, которые либо фильтруются, либо компенсируются применением специальных балансных схем. Компенсация в аналоговых элементах осуществляется с конечной точностью. В первом приближении отклонение от линейности преобразования колебаний на видеочастоту может быть оценено квадратичным полиномом. Квадратичное преобразование принимаемых колебаний приводит к появлению дополнительной случайной постоянной и флюктуационной составляющей шума эти дополнительные составляющие шума можно рассмотреть как собственный шум фазового детектора. Нелинейность характеристики АЦП приводит к такому же результату.
Таким образом совокупности аналоговых элементов (фазовые детекторы, АЦП) РЛ-приемника соответствует собственный случайный шум, зависящий от конкретный аппаратной реализации фазовых детекторов и АЦП, имеющий случайную постоянную и флюктуационные составляющие. Этот собственный шум ограничивает чувствительность РЛ-приемника.
Для сохранения чувствительности приемника на практике прибегают к усилению принимаемых колебаний на входе фазовых детекторов. Принимаемые колебания усиливают до тех пор, пока уровень случайных неконтролируемых сигналов (пролазов, дрейфа нулевого уровня в АЦП) не станет существенно меньше уровня принимаемых колебаний. Такая мера сохранения чувствительности приемного тракта в конечном счете приводит к уменьшению динамического диапазона принимаемых колебаний, которые могут линейно обрабатываться в цифровом виде, так как в любой реальной аналоговой аппаратуре существует ограничение сверху на величину поступающих сигналов.
При цифровой реализации обработки сигналов в РЛ-приемнике удается достигнуть существенно большего линейного участка динамического диапазона обрабатываемых колебаний, чем при реализации обработки сигналов в РЛ-приемнике на аналоговой элементной базе. В частности, ограничение динамического диапазона обрабатываемых сигналов в аналоговой системе селекции движущихся целей (СДЦ) определяется уровнем ложных сигналов, существующих в аналоговых линиях задержки, а также рядом других технических причин, обусловленных нестабильностью аналоговых элементов аппаратуры обработки. При цифровой обработке эти недостатки отсутствуют, благодаря этому применение цифровой элементной базы позволяет достигнуть более высоких характеристик по помехозащищенности от помех, вызываемых мешающими отражениями (пассивными помехами, местными предметами). Улучшение характеристик по помехозащищенности в этом случае достигается за счет линеаризации обработки принимаемых колебаний. Поэтому весьма актуально увеличение линейности обработки РЛ-приемника.
Целью изобретения является улучшение помехозащищенности РЛ-приемника при использовании в РЛС сложных зондирующих сигналов за счет увеличения динамического диапазона обрабатываемых колебаний путем компенсации и стабилизации случайных изменений параметров аналоговой аппаратуры РЛ-приемника.
Сущность изобретения заключается в том, что в состав типового РЛ-приемника сложных сигналов, содержащего последовательно соединенные фазовые детекторы, АЦП, систему селекции движущихся целей (СДЦ), ограничитель оптимальный фильтр, детектор и накопитель, между выходом АЦП и входом СДЦ включается схема адаптивного вычитания постоянной составляющей, которая вычитает постоянную составляющую на основе предварительной оценки уровня ложных тревог на фиксированном пороговом уровне, и параллельно ее выходу подключен блок автоматической регулировки усиления (АРУ), выход которого управляет регулируемым усилителем, включенным на входе фазовых детекторов.
При этом устройство вычитания постоянной составляющей (ВПС) выполнено из блока сравнения, один из входов которого является входом устройства ВПС, а выход является выходом устройства ВПС, знаковый разряд блока сравнения через фильтр низких частот (ФНЧ) соединен с вторым входом блока сравнения, а второй вход ФНЧ подключен к выходу источника опорных меток, устройство автоматической регулировки усиления выполнено из последовательно соединенных детектора, блока сравнения с фиксированным пороговым уровнем, фильтра низких частот (ФНЧ) и цифроаналогового преобразователя (ЦАП), выход которого подключен к управляемому входу регулируемого усилителя, вход которого является входом всего устройства, а выход подключен к входу фазовых детекторов.
На фиг. 1 приведена структурная схема предложенного приемника; на фиг. 2 схема фильтра нижних частот; на фиг. 3 представлены эпюры напряжений в отдельных точках предложенного устройства.
Приемник содержит регулируемый усилитель 1, фазовый детектор 2, АЦП 3, блок сравнения 4, блок 5 СДЦ, ограничитель 6, фильтр сжатия 7, детектор 8, некогерентный накопитель 9, ФНЧ 10, хронизатор 11, источник квадратурных колебаний 12, блок 13 хранения постоянных чисел, ЦАП 14. ФНЧ содержит инвертор 15, блок 16 совпадения, реверсивный счетчик 17.
Принцип работы устройства заключается в следующем. На вход регулируемого усилителя 1 поступают колебания в полосе пропускания, равной ширине спектра зондирующих сигналов (см. фиг. 3, а).
На выходе усилителя 1 колебания с помощью фазовых детекторов 2 разделяются на два квадратурных канала, при этом на управляемые фазовые детекторы 2 поступают гармонические колебания с соответствующих выходов источника квадратурных колебаний 12.
Источник квадратурных колебаний 12 представляет собой последовательное соединение двух блоков: генератора гармонических колебаний частоты ωo и фазовращателя на частоте ωo на 90о, вход и выход которого являются выходами источника 12. Частота равна центральной частоте спектра принимаемых колебаний.
Принятые колебания усиливаются до такого уровня, чтобы собственный шум последующих последовательно соединенных блоков 2 и 3 не оказывал заметного влияния на коэффициент шума РЛ-приемника.
В идеальном случае амплитудные характеристики блоков 2 и 3 должны быть строго линейными, тогда они не вносят искажений в принимаемые колебания.
Отклонения от линейности амплитудных характеристик приводят к появлению дополнительных комбинационных составляющих случайного процесса, которые отсутствуют при линейной обработке. Эти дополнительные составляющие случайного процесса являются характеристикой конкретного элемента блоков (2 или 3) и их можно рассматривать как собственный шум этих элементов. Характерный вид искаженного сигнала приведен на фиг. 3, б. В общем случае амплитудную характеристику 2 или 3 можно представить в виде ряда Тейлора:
f(x)  anxn где an коэффициенты, которые являются численными параметрами нелинейности амплитудной характеристики аналоговых элементов.
anxn где an коэффициенты, которые являются численными параметрами нелинейности амплитудной характеристики аналоговых элементов.
В интересующем нас случае амплитудная характеристика имеет вид
f(x) ≃ a1x + a2x2, причем в виду слабой нелинейности a2 << a1.
Преобразование случайного процесса в нелинейном квадратичном элементе приводит к появлению постоянной составляющей и дополнительного флюктуационного шума, которые отсутствовали при идельно линейной амплитудной характеристике. По мощности уровень постоянной составляющей и дополнительного шума равны на выходе квадратичного нелинейного преобразования.
Таким образом, если скомпенсировать постоянную составляющую на выходе последовательно соединенных блоков 2 и 3, то можно улучшить (увеличить) динамический диапазон линейно обрабатываемых колебаний. С учетом того, что максимальное изменение постоянной составляющей равно сумме постоянных составляющих на выходах блоков 2 и 3, а дополнительные флюктуационные составляющие шума увеличиваются некогерентно, то минимальное увеличение динамического диапазона на входе блока 5 составит величину не менее 9 дБ.
Кроме того, вычитание постоянной составляющей на выходе АЦП 3 позволяет снизить технические требования, предъявляемые к величине дрейфа нулевого уровня, что является дополнительным достоинством данной операции.
Сущность компенсации постоянной составляющей заключается в следующем. Сигналы с выхода АЦП 3, представленные в виде К-разрядного числа в каждом из квадратурных каналов, поступают на вход К-разрядного блока сравнения 4, представляющего собой алгебраический сумматор, который осуществляет вычитание среднего значения из случайного процесса на выходе АЦП 3. На один из блоков 4 поступают числовые значения, соответствующие случайному процессу на выходе АЦП 3, а на его другой вход поступает оценка среднего значения случайного процесса с выхода ФНЧ 10 (см. фиг. 4, в). ФНЧ 10 может быть выполнен несколькими способами, но при цифровой реализации ФНЧ 10 целесообразно в качестве основного интегратора ФНЧ использовать реверсивный счетчик. Пример такой реализации ФНЧ 10 приведен на фиг. 2, где блок 10 состоит из инвертора 15, двух блоков совпадения 16 и реверсивного счетчика 17. Вход ФНЧ 10 соединен с входами блока совпадения 16, с одним из блоков совпадения непосредственно, а с другим через инвертор 15. Вторые входы объединены и являются вторым ФНЧ 10, а их выходы соединены с входами реверсивного счетчика 17, выход которого является выходом ФНЧ.
Формирование оценки среднего значения случайного процесса ФНЧ 10 происходит в результате подсчета числа положительных и отрицательных выбросов случайного процесса по выходу блока сравнения 4 в каждом элементарном кванте времени (дискрете) (см. фиг. 3, г, д). Длительность квантов должна быть выбрана равной времени корреляции шума τ, чтобы двоичные сигналы различных квантов были статистически независимыми. Разделение положительных и отрицательных сигналов на выходе блока 4 осуществляется с помощью знакового разряда. При этом напряжение знакового разряда, равное логической "единице", соответствует положительному числу, а напряжение логического "нуля" отрицательному числу. Напряжение знакового разряда блока 4 поступает на входы двух блоков совпадения 16, на один из блоков непосредственно, а на второй через инвертор 15. На вторые входы с выхода хронизатора 11 поступает непрерывная последовательность импульсов, следующих через временной интервал τ, равный корреляции шума (см. фиг. 3, е).
Хронизатор 11 может быть выполнен, например, в виде последовательно соединенных компаратора, счетчика числа импульсов и дешифратора. При этом вход компаратора является входом хронизатора 11 и он соединен с одним из выходов источников квадратурных колебаний 12. С помощью последовательного соединения указанных элементов реализуется непрерывная последовательность импульсов, указанная на фиг. 3. Реверсивный счетчик 17 осуществляет подсчет импульсов этой последовательности. При этом импульсы, соответствующие положительному знаковому разряду, поступают на вход прямого счета, а соответствующие отрицательному знаковому разряду на вход обратного счета реверсивного счетчика 17.
В установившемся режиме на прямой и обратный счетные входы реверсивного счетчика 17 поступают импульсы, вероятность появления которых на выходах блоков 16 фиксирована и равна 0,5. Равновероятное появление импульсов на выходах блоков 16 означает, что на выходе реверсивного счетчика 17 сформировалось постоянное число, равное среднему значению случайного процесса.
Точность оценки среднего значения случайного процесса определяется коэффициентом усиления между выходом знакового разряда блока 4 и выходом реверсивного счетчика 17. Коэффициент усиления выбирается так, чтобы в оценке среднего значения случайного процесса участвовало большое число временных интервалов, достаточное для применения закона больших чисел. Коэффициент усиления изменяется (увеличивается) путем подключения вторых входов блока 4 к более старшим разрядам детектора 8. Отметим, что среднее значение вычисляется адаптивным образом непосредственно в пределах зоны обнаружения РЛС. В силу этого обстоятельства на выходе блока 4 отслеживаются также случайные изменения постоянной составляющей, обусловленные нелинейными искажениями при воздействии нестационарного случайного процесса (в общем случае многомодального), что приводит к дополнительному улучшению динамических характеристик приемного тракта в сложных помеховых условиях. Характерный вид установившегося случайного процесса с переходным участком изображен на фиг. 3, ж.
Флюктуационную составляющую (дополнительную) случайного процесса, возникающую в результате нелинейных искажений в фазовых детекторах 2 и АЦП 3, скомпенсировать невозможно. Для исключения ее влияния на чувствительность приемника необходимо, чтобы цена младшего разряда АЦП 3 была не менее среднеквадратичного значения случайного процесса (собственного шума РЛ-приемника) на входе АЦП 3. Загрубление чувствительности младшего разряда может приводить к заметным потерям в отношении сигнал-шум при обнаружении пороговых сигналов. Для поддержания этих потерь на заданном уровне при максимальном динамическом диапазоне обрабатываемых колебаний необходимо фиксировать коэффициент передачи случайного процесса через фазовые детекторы 2 и АЦП 3 на минимально допустимом уровне. Выполнение этой задачи решается путем оценки среднеквадратичного значения случайного процесса на выходе блоков 4, а результат оценки используется для управления коэффициентом передачи регулируемого усилителя 1.
Для оценки среднеквадратичного значения случайного процесса принятые колебания на выходе блока 4 детектируются дополнительным детектором 8. На выходе детектора 8 уровень принятых колебаний сравнивается с фиксированным числом в дополнительном блоке сравнения 4, который представляет собой алгебраический сумматор. Набор фиксированных чисел хранится в блоке 13, выход которого соединен с вторым входом дополнительного блока 4 сравнения. В качестве блока 13 могут быть использованы элементы цифровой памяти типа оперативно запоминающих устройств либо постоянное запоминающее устройство, в котором записано в двоичном коде постоянное число.
Формирование оценки среднеквадратичного значения случайного процесса на выходе дополнительного блока 4 сравнения осуществляется в результате подсчета на ее выходе числа положительных и отрицательных значений случайного процесса с помощью дополнительного ФНЧ 10. Разделение положительных и отрицательных сигналов на выходе дополнительного блока 4 осуществляется с помощью знакового разряда. Реализация дополнительного ФНЧ 10 может быть выполнена точно так же, как и в случае оценки среднего значения постоянной составляющей случайного процесса (см. фиг. 2).
В установившемся режиме на прямой и обратный счетные входы реверсивного счетчика 17 будут поступать импульсы, вероятность появления которых равна 0,5. Равновероятное появление счетных импульсов на входах 17 реверсивного счетчика 17 означает, что на входе дополнительного блока 4 среднеквадратичное значение случайного процесса с выхода дополнительного детектора 8 равно в среднем постоянному числу, хранящемуся в блоке 13. Напряжение на выходе ФНЧ 10 с помощью ЦАП 14 преобразуется в постоянное аналоговое напряжение, которое управляет коэффициентом усиления усилителя 1 для поддержания максимально допустимого уровня собственного шума приемника на входе блока 5. В ограничителе 6 происходит нормирование принятых колебаний по мощности. С выхода ограничителя 6 нормированные колебания поступают на вход фильтра 7, который осуществляет внутрипериодную обработку эхо-сигналов. На выходе фильтра 7 принятые колебания детектируются детектором 8 и поступают на вход некогерентного накопителя 9, где осуществляется некогерентная фильтрация принятых колебаний по азимутальной координате.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИЕМНОЕ УСТРОЙСТВО | 1985 |
|
RU2212041C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| УСТРОЙСТВО ОПТИМАЛЬНОЙ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТЕЙ ШИРОКОПОЛОСНЫХ СИГНАЛОВ С МОДУЛЯЦИЕЙ НЕСУЩЕЙ ЧАСТОТЫ | 1990 |
|
RU2237908C2 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО ДЛЯ РЛС С РАСШИРЕННЫМ ДИНАМИЧЕСКИМ ДИАПАЗОНОМ | 2018 |
|
RU2701719C1 |
| ПРИЕМНОЕ УСТРОЙСТВО СО СТАБИЛИЗАЦИЕЙ УРОВНЯ ЛОЖНЫХ ТРЕВОГ | 1990 |
|
RU2226703C2 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ В РЛС С ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ | 1991 |
|
RU2230337C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| Устройство для цифровой фильтрации на основе дискретного преобразования Фурье | 1990 |
|
SU1795475A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2011 |
|
RU2495449C2 |
| Ультразвуковой фазовый измеритель виброперемещений | 1990 |
|
SU1753404A1 |


Использование: радиолокация. Сущность изобретения: радиолокационный приемник содержит регулируемый усилитель 1, два фазовых детектора 2, два аналого - цифровых преобразователя 3, три блока сравнения 4, блок 5 селекции движущихся целей, ограничитель 6, фильтр сжатия 7, детектор 8, некогерентный накопитель 9, три фильтра нижних частот 10, хронизатор 11, источник квадратурных колебаний 12, блок хранения констант 13 и цифроаналоговый преобразователь 14. 1-2-3-4-5-6-7-8-9, 14-8 4-10-14-1, 2-12, 2-11-10, 13-4, 10-4. 3 ил.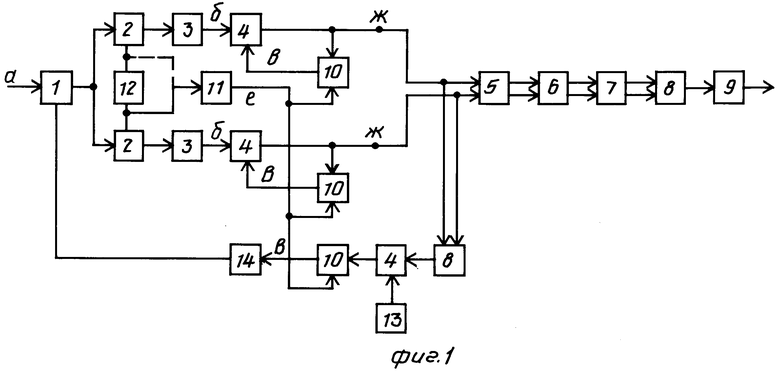
РАДИОЛОКАЦИОННЫЙ ПРИЕМНИК СЛОЖНЫХ СИГНАЛОВ, содержащий два параллельно соединенных квадратурных канала, каждый из которых состоит из последовательно соединенных фазового детектора, управляемые входы которого подключены к источнику квадратурных колебаний, и аналого-цифрового преобразователя, последовательно соединенные блок селекции движущихся целей, ограничитель, фильтр сжатия, детектор некогерентный накопитель, выход которого является выходом приемника, отличающийся тем, что, с целью повышения помехозащищенности и стабилизации уровня ложных тревог путем компенсаций искажений, возникающих за счет отклонения амплитудных характеристик аналоговых элементов квадратурных каналов от линейных, введены регулируемый усилитель, вход которого является входом приемника, а выход подключен к входам квадратурных каналов, блоки сравнения, выходы которых раздельно подключены к соответствующим входам блока селекции движущихся целей, а входы к выходам аналого-цифрового преобразователя каждого из квадратурных каналов, к второму входу блока сравнения подключен вход фильтра низких частот, первый вход которого соединен со знаковым разрядом блока сравнения, а второй вход фильтра низких частот соединен с выходом хронизатора, вход которого соединен с одним из выходов источника квадратурных колебаний, введены третий блок сравнения, второй детектор, третий фильтр низких частот, цифроаналоговый преобразователь и блок хранения констант, выходы первого и второго блоков сравнения соединены с входами второго детектора, выход которого через последовательно соединенные третий блок сравнения, второй вход которого соединен с выходом блока хранения констант, третий фильтр низких частот, второй вход которого соединен с выходом хронизатора, и цифроаналоговый преобразователь соединен с управляемым входом регулируемого усилителя.
| Лезин Ю.С | |||
| Оптимальные фильтры и накопители импульсных сигналов | |||
| М.: Сов.радио, 1969, с.26. |
