ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к управлению конвейером, таким как забойный скребковый конвейер (armored face conveyor, «AFC») или консольный перегружатель (beam stage loader, «BSL»).
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0002] Горнодобывающие системы посредством длинных забоев включают в себя, среди прочего, конвейер, такой как забойный скребковый конвейер (AFC) или консольный перегружатель (BSL), для транспортировки добытого материала (например, угля) из области, где материал добывается, в область для обработки (например, дробления, хранения и т.д.). Забойные скребковые конвейеры (AFC) включают в себя, например, первую звездочку и вторую звездочку, вокруг которых выполнена цепь. Цепь приводится в движение посредством одного или более приводных механизмов или двигателей (например, двигателем главного створа, двигателем хвостового створа и т.д.), и перемещение цепи вокруг звездочек вызывает транспортировку конвейером добытого материала. Традиционные конвейеры, которые включают в себя выдвижную раму концевой станции, используют методики предварительного натяжения для увеличения натяжения цепи вокруг звездочек и предотвращения состояние нулевого натяжения или провисающей цепи. Методики предварительного натяжения включают в себя, например, использование гидравлического цилиндра для отодвигания первой звездочки от второй звездочки.
[0003] В настоящем изобретении в целом предложены, среди прочего, методики для определения натяжения цепи и управления конвейером для автоматического управления натяжением цепи посредством изменения положения звездочки с помощью гидравлического цилиндра. Настоящее изобретение может использоваться, например, совместно с конвейером, в котором первая станция конвейера является фиксированной, а вторая станция конвейера является выдвижной. Для таких конвейеров натяжение в цепи изменяется вдоль длины конвейера и необходимо избегать состояний нулевого натяжения или провисающей цепи с целью максимального повышения надежности конвейера. Как таковой, один конструктивный вариант системы включает в себя конвейер, имеющий выдвижную раму концевой станции, первую звездочку, вторую звездочку, один или более гидравлических цилиндров, одну или более цепей и контроллер. По меньшей мере одна из первой звездочки и второй звездочки включают в себя приводной механизм (например, двигатель и контроллер двигателя). Приводной механизм поворачивает присоединенную первую звездочку или вторую звездочку для транспортировки добытого материала из первого местоположения во второе местоположение, и контроллер использует измеренную силу противодействия звездочки и вычисленную силу от нижней цепи для вычисления силы от верхней цепи, которая относится к натяжению одной или более цепей. Определенная сила от верхней цепи используется для автоматического управления положением упомянутого одного или более гидравлических цилиндров и звездочек.
[0004] В одном варианте осуществления в настоящем изобретении предложен конвейер для горнодобывающей системы. Конвейер включает в себя первую звездочку, вторую звездочку, цепь, приводной механизм, датчик, чувствительный к нагрузке элемент, гидравлический цилиндр и контроллер. Первая звездочка имеет первое положение, а вторая звездочка имеет второе положение. Первое положение отделено от второго положения на некоторое расстояние. Цепь присоединена к первой звездочке и второй звездочке, и цепь имеет верхнюю часть цепи и нижнюю часть цепи. Приводной механизм соединен с одной из первой звездочки или второй звездочки и выполнен с возможностью приведения в движение одну из первой звездочки или второй звездочки. Датчик выполнен с возможностью генерирования первого сигнала, относящегося к некоторой характеристике приводного механизма. Чувствительный к нагрузке элемент выполнен с возможностью генерирования второго сигнала, относящегося к силе противодействия упомянутой одной из первой звездочки или второй звездочки. Контроллер включает в себя блок обработки и запоминающее устройство. Контроллер выполненным с возможностью приема первого сигнала от датчика, приема второго сигнала от чувствительного к нагрузке элемента, вычисления натяжения верхней части цепи на основе первого сигнала и второго сигнала и генерирования сигнала управления для управления положением гидравлического цилиндра на основе определенного натяжения верхней части цепи для управления упомянутым расстоянием между первой звездочкой и второй звездочкой.
[0005] В другом варианте осуществления в настоящем изобретении предложен способ управления натяжением конвейерной цепи. Конвейерная цепь имеет верхнюю часть цепи и нижнюю часть цепи. Способ включает в себя этапы, на которых принимают первый сигнал, относящийся к некоторой характеристике приводного механизма, и принимают второй сигнал, относящийся к силе противодействия звездочки. Приводной механизм выполнен с возможностью приведения в движение звездочку. Способ также включает в себя этапы, на которых вычисляют, с помощью процессора, натяжение верхней части цепи конвейерной цепи на основе первого сигнала и второго сигнала и генерируют сигнал управления для управления положением гидравлического цилиндра на основе вычисленного натяжения верхней части цепи.
[0006] В другом варианте осуществления в настоящем изобретении предложен конвейер для горнодобывающей системы. Конвейер включает в себя звездочку, цепь, приводной механизм, гидравлический цилиндр и контроллер. Цепь присоединена к звездочке и имеет верхнюю часть цепи и нижнюю часть цепи. Приводной механизм соединен со звездочкой и выполнен с возможностью приведения в движение звездочку. Контроллер включает в себя блок обработки и запоминающее устройство. Контроллер выполнен с возможностью приема первого сигнала, относящегося к некоторой характеристике приводного механизма, приема второго сигнала, относящегося к силе противодействия звездочки, вычисления натяжения верхней части цепи на основе первого сигнала и второго сигнала и генерирования сигнала управления для управления положением гидравлического цилиндра на основе определенного натяжения верхней части цепи.
[0007] Прежде, чем будут подробно объяснены какие-либо варианты осуществления настоящего изобретения, следует понять, что настоящее изобретение не ограничено в своем применении подробностями конфигурации и размещением компонентов, изложенных в последующем описании или изображенных на сопроводительных чертежах. Настоящее изобретение допускает наличие других вариантов осуществления и реализацию на практике или выполнение различным образом. Кроме того, следует понимать, что фразеология и терминология, используемые в данном документе, приведены с целью описания и не должны расцениваться в качестве ограничения. Используемые термины «включающий в себя», «содержащий» или «имеющий» и их разновидности в данном документе означают охват перечисленных после них элементов и их эквивалентов, а также дополнительных элементов. Если не указано или ограничено иным образом, то термины «закрепленный», «подключенный», «поддерживаемый» и «соединенный» и их разновидности используются в широком смысле и охватывают как непосредственные, так и косвенные крепления, подключения, поддержки и соединения.
[0008] Кроме того, следует понимать, что варианты осуществления настоящего изобретения могут включать в себя аппаратное обеспечение, программное обеспечение и электронные компоненты или модули, которые, в целях обсуждения, могут быть изображены и описаны, как будто большинство компонентов реализовано исключительно в аппаратном обеспечении. Однако, среднему специалисту в уровне техники, с основой на прочтение данного подробного описания, будет понятно, что по меньшей мере в одном варианте осуществления имеющие электронную основу варианты выполнения изобретения могут быть реализованы в программном обеспечении (например, сохранены на постоянном считываемом компьютером носителе), исполняемом одним или более блоками обработки, такими как микропроцессор и/или специализированные интегральные схемы (application specific integrated circuits, «ASIC»). Также следует отметить, что множество основанных на аппаратном обеспечении и программном обеспечении устройств, так же как и множество различных структурных компонентов, могут быть использованы для реализации настоящего изобретения. Например, «серверы» и «вычислительные устройства», описанные в спецификации, могут включать в себя один или более блоков обработки, один или более модулей считываемых компьютером носителей, один или более интерфейсов ввода-вывода и различные соединения (например, системную шину), соединяющие компоненты.
[0009] Независимые варианты выполнения настоящего изобретения станут наглядными после рассмотрения подробного описания и сопроводительных чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
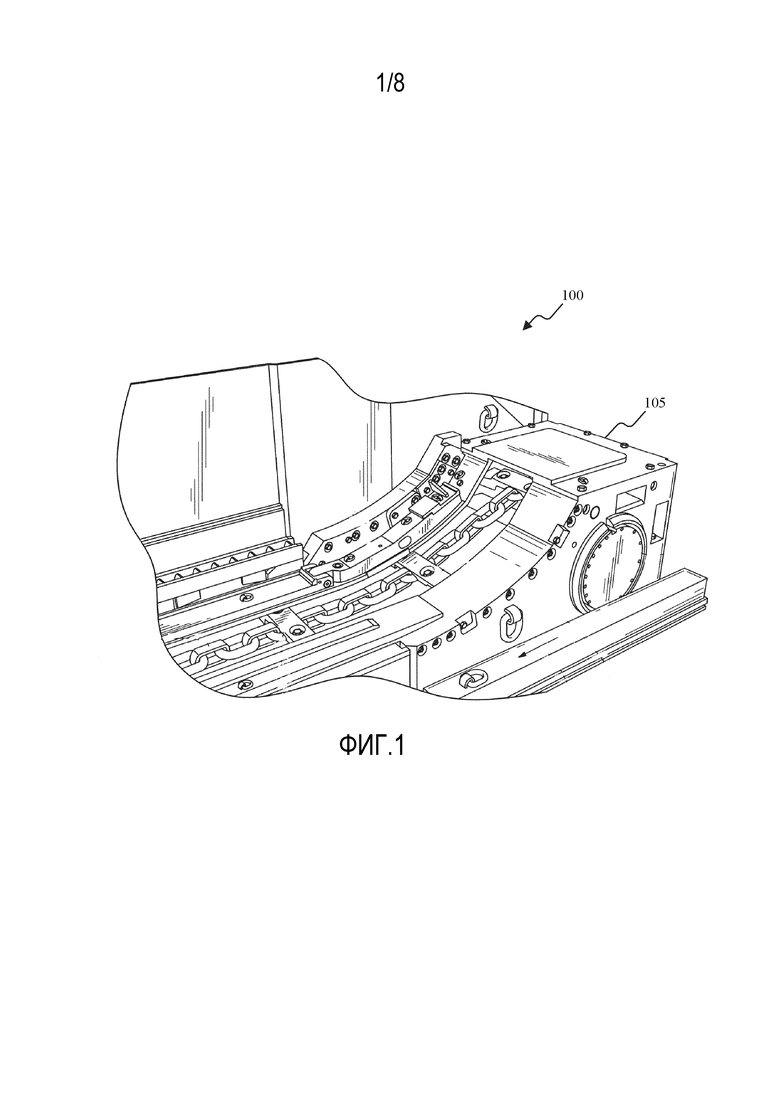
[0010] На Фиг. 1 показана рама станции цепного конвейера.
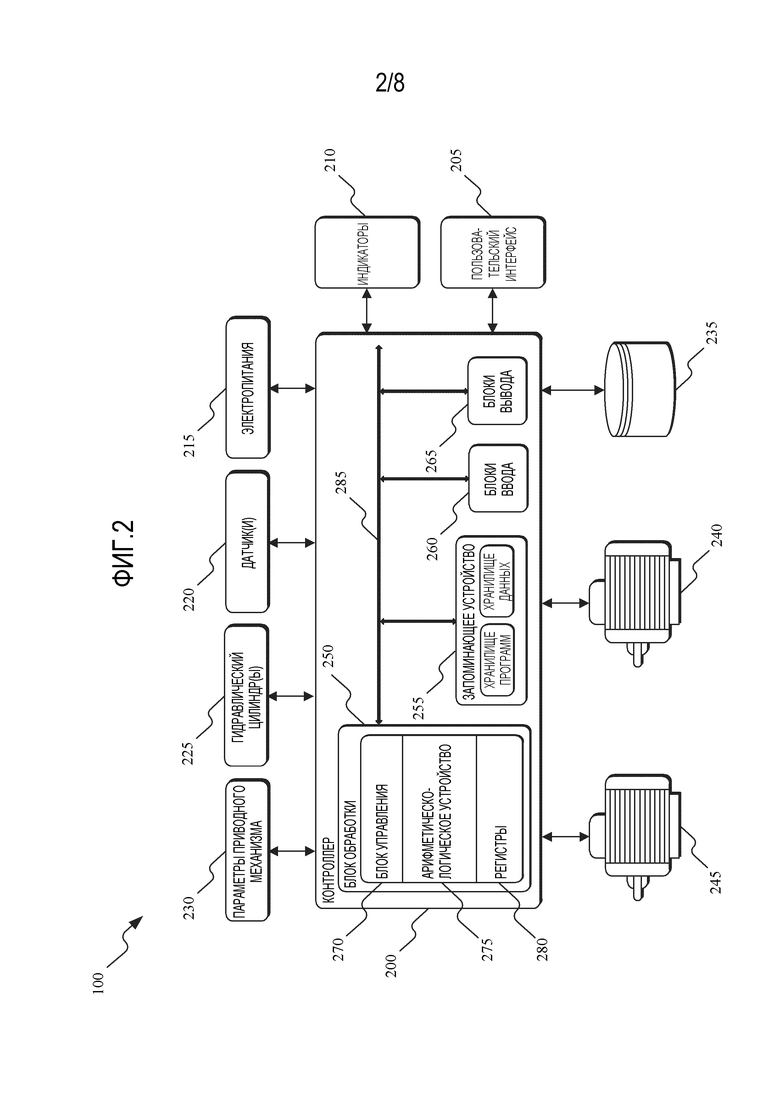
[0011] На Фиг. 2 показан контроллер для цепного конвейера согласно одному варианту осуществления настоящего изобретения.
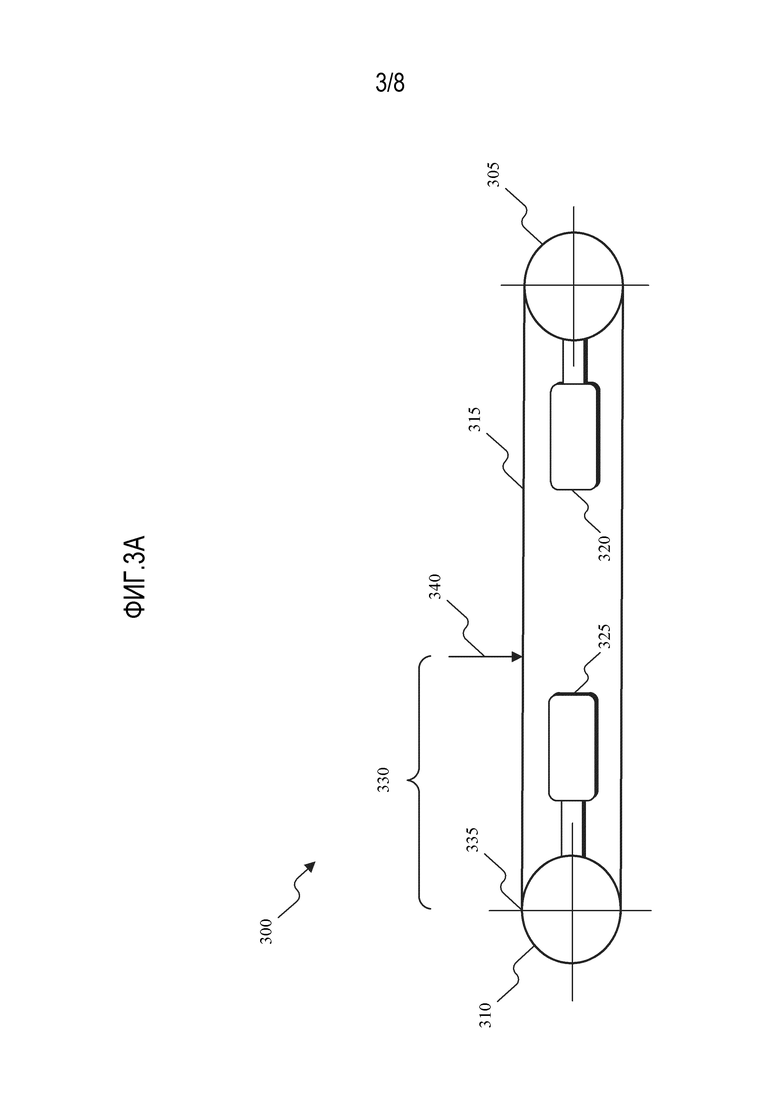
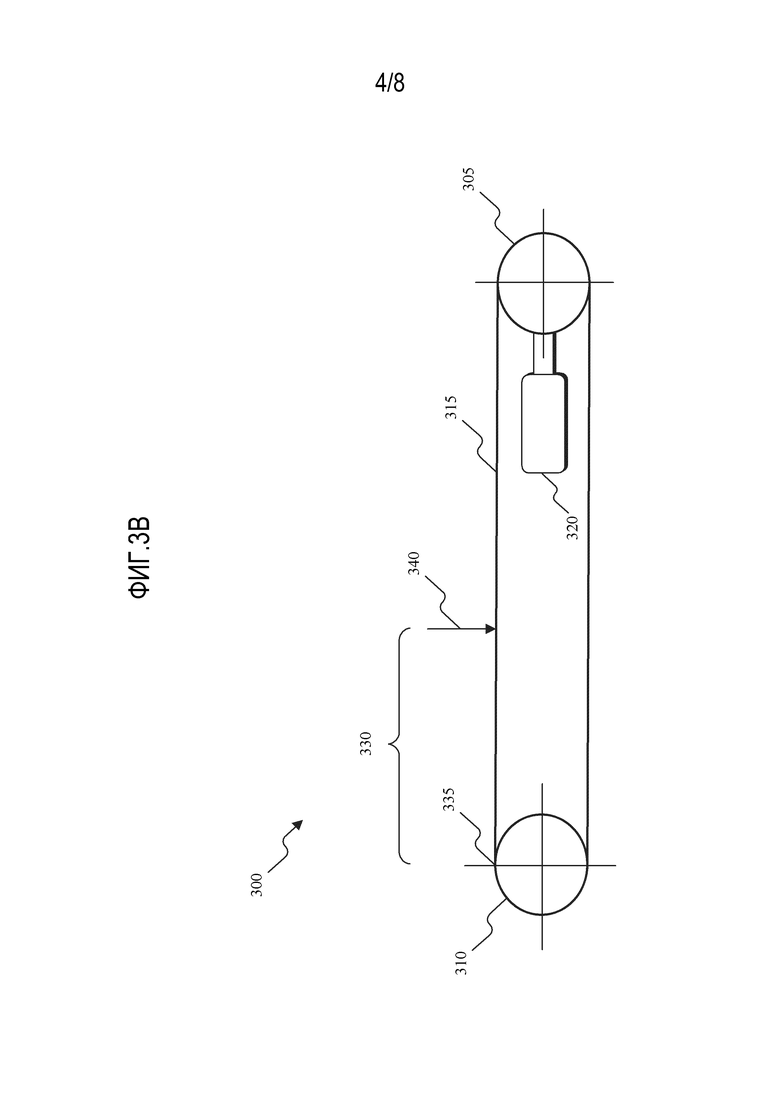
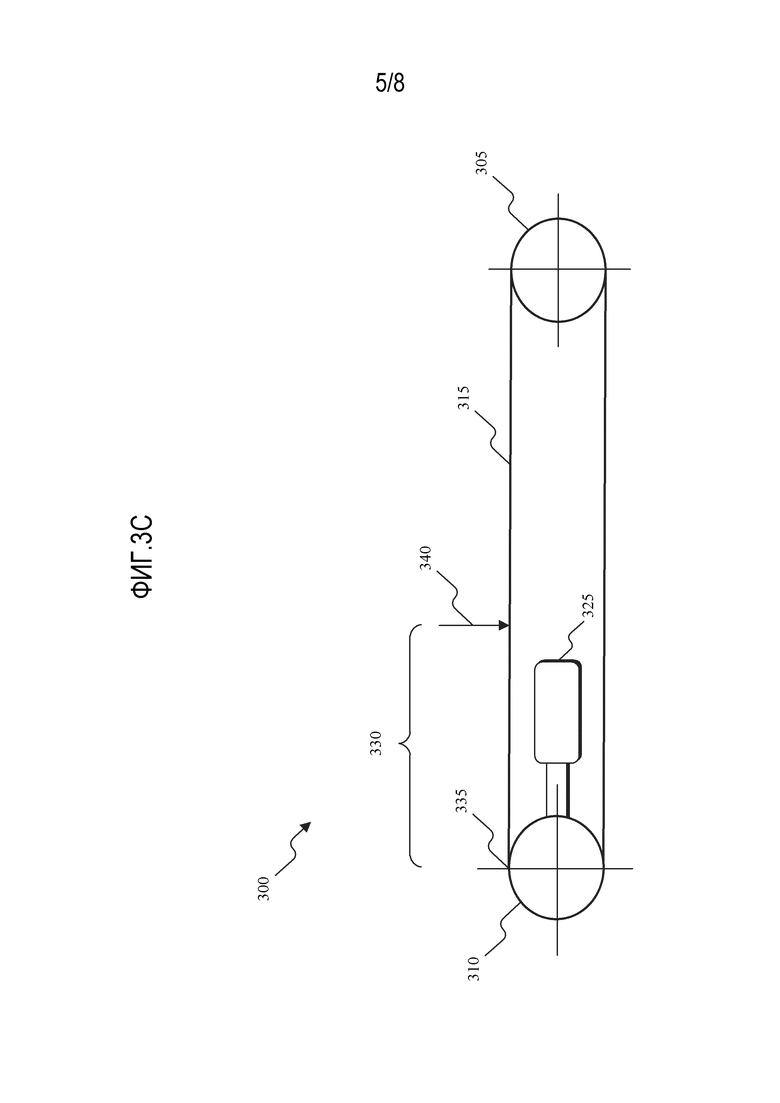
[0012] На Фиг. 3A, 3B и 3C показаны схемы, изображающие обобщенные конвейеры и «опасной участок» конвейеров.
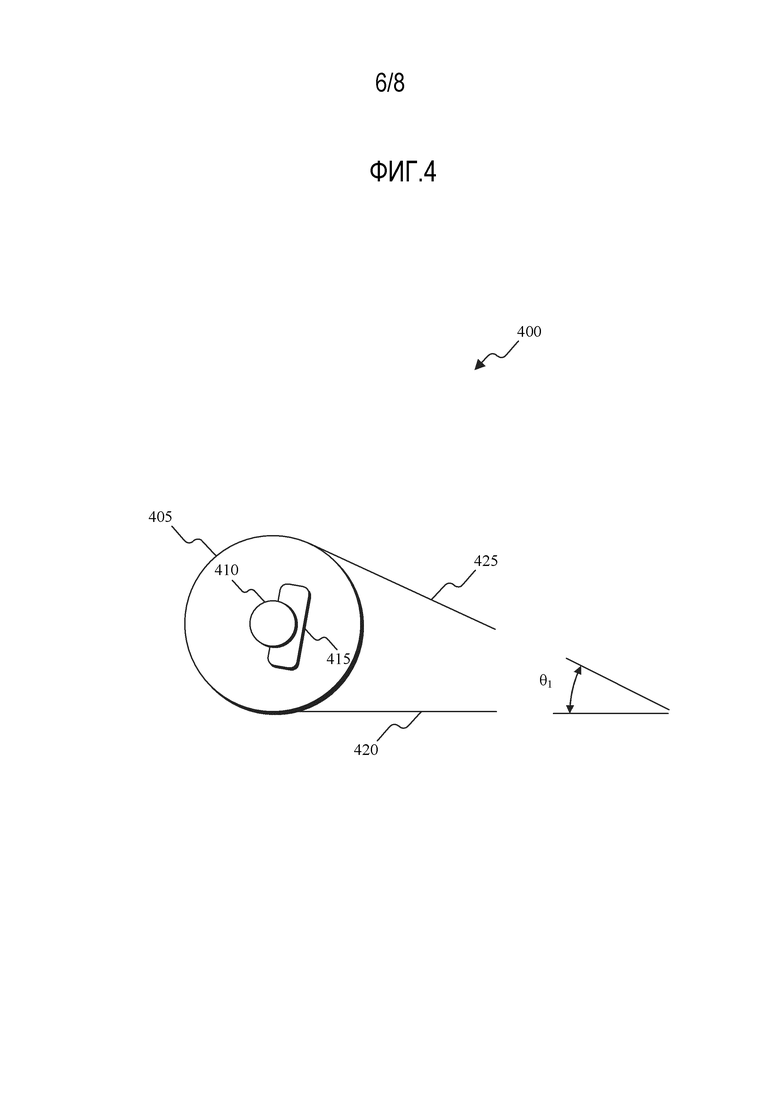
[0013] На Фиг. 4 показана звездочка для конвейера и угол цепи, отходящий от звездочки.
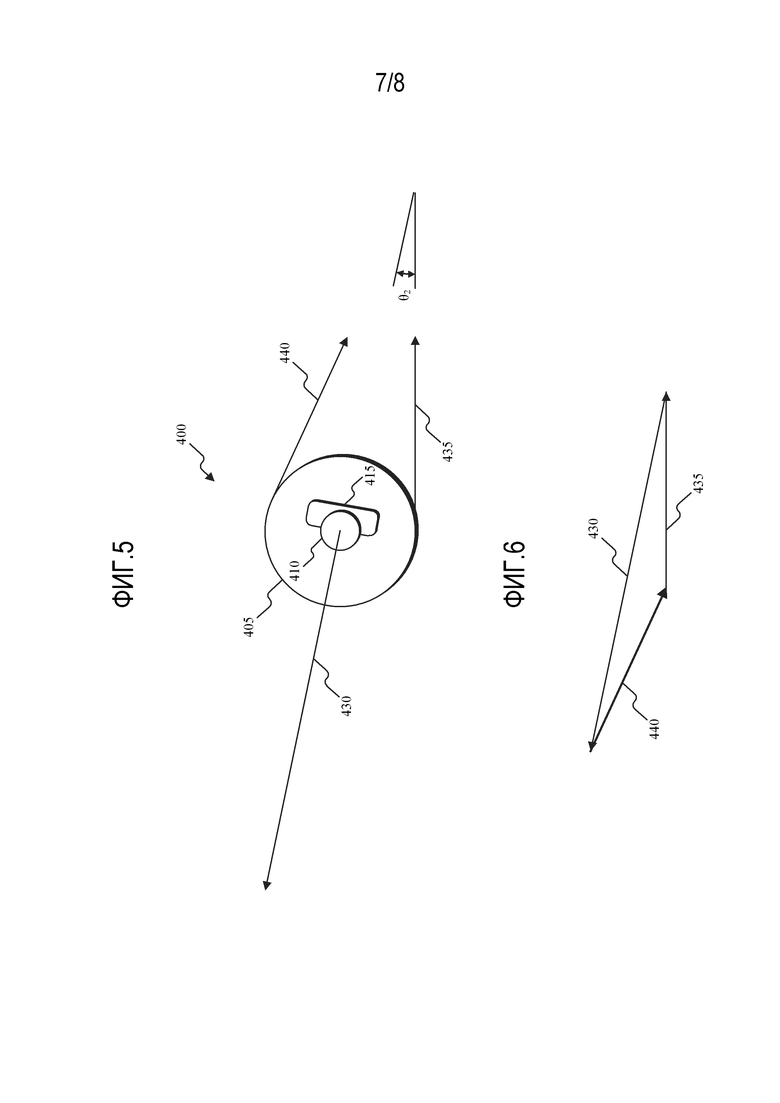
[0014] На Фиг. 5 показана схема, изображающая силу противодействия звездочки и силу от цепи.
[0015] На Фиг. 6 показана схема, изображающая векторное суммирование силы противодействия звездочки и силы от цепи.
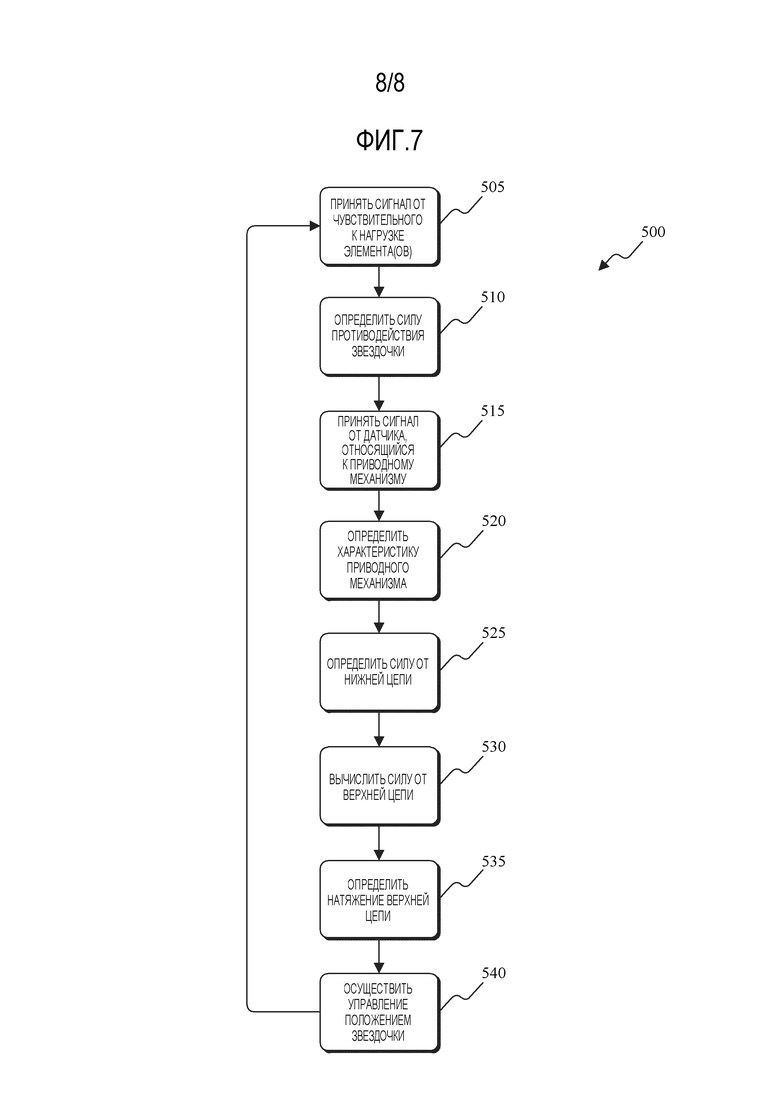
[0016] На Фиг. 7 показан процесс управления положением гидравлического цилиндра для цепного конвейера.
ПОДРОБНОЕ ОПИСАНИЕ
[0017] Настоящее изобретение, описанное в данном документе, относится к цепочно-конвейерной системе и управлению ею. Цепочно-конвейерная система включает в себя, например, забойный скребковый конвейер («AFC»), консольный перегружатель («BSL») или другой конвейер или горнодобывающий конвейер. В описательных целях настоящее изобретение описано в данном документе по отношению к вариантам осуществления настоящего изобретения, которые включают в себя забойный скребковый конвейер (AFC). Забойные скребковые конвейеры (AFC) включают в себя, например, раму концевой станции, первую звездочку, вторую звездочку, цепь, один или более приводных механизмов или двигателей (например, двигатель хвостового створа, двигатель главного створа и т.д.), один или более гидравлических цилиндров и контроллер. Контроллер выполнен с возможностью приема сигналов, относящихся к некоторой характеристике упомянутого одного или более двигателей (например, крутящий момент двигателя) и силе противодействия звездочки (например, от чувствительного к нагрузке элемента). На основе принятых сигналов контроллер выполнен с возможностью определения натяжения для верхней части цепи. На основе натяжения верхней части цепи контроллер определяет одно или более из необходимого выдвижения рамы концевой станции, необходимого положения для упомянутого одного или более гидравлических цилиндров, необходимого положения для первой звездочки или необходимого положения для второй звездочки. Например, после того, как контроллер определил необходимое положение для упомянутого одного или более гидравлических цилиндров, контроллер управляет упомянутым одним или более гидравлическими цилиндрами до необходимого положения для изменения положения первой звездочки.
[0018] На Фиг. 1 показана часть забойного скребкового конвейера (AFC) 100, который включает в себя раму 105 концевой станции. Рама 105 концевой станции включает в себя, среди прочего, фиксированную часть рамы, выдвижную часть рамы и один или более гидравлических цилиндров. Рама 105 концевой станции является частью горнодобывающей системы, которая также включает в себя, например, выемочный комбайн. В некоторых конструктивных вариантах положение выдвижной части рамы определяется с использованием датчика линейного смещения, выполненного с возможностью измерения положения выдвижной части рамы на всем ее диапазоне перемещения. Положение выдвижной части рамы может быть изменено (например, приближено или отдалено) для соответствующего управления положением одного или более гидравлических цилиндров, первой звездочки, второй звездочки и т.д.
[0019] На Фиг. 2 показан контроллер 200, присоединенный к забойному скребковому конвейеру (AFC) 100. Контроллер 200 подключен к или соединен со множеством дополнительных модулей или компонентов забойного скребкового конвейера (AFC) 100, таких как модуль 205 пользовательского интерфейса, один или более индикаторов 210, модуль 215 электропитания, один или более датчиков 220, один или более гидравлических цилиндров 225, модуль 230 параметров приводного механизма или двигателя, хранилище или база 235 данных, первый приводной механизм и привод 240 (например, связанный с главным створом) и второй приводной механизм и привод 245 (например, связанный с хвостовым створом). В некоторых вариантах осуществления первый приводной механизм и привод 240 включает в себя первый двигатель и первый привод двигателя, а второй приводной механизм и привод 245 включает в себя второй двигатель и второй привод двигателя. В некоторых вариантах осуществления каждый из первого двигателя и первого привода 240 двигателя и второго двигателя и второго привода 245 двигателя включает в себя блоки переключения скоростей. Варианты осуществления настоящего изобретения, описанного в данном документе, описываются по отношению к приводным механизмам и приводам, являющимся двигателем и приводами двигателей. Один или более датчиков 220 являются, например, датчиками мощности внутри забойного скребкового конвейера (AFC) 100, выполненными с возможностью измерения или считывания некоторой электрической характеристики (например, тока, напряжения, коэффициента мощности, крутящего момента, скорости, входной мощности, выходной мощности и т.д.), чувствительными к нагрузке элементами и т.д. Контроллер 200 включает в себя сочетание аппаратного обеспечения и программного обеспечения, которые выполнены с возможностью, среди прочего, управления функционированием забойного скребкового конвейера (AFC) 100, управления положением одного или более гидравлических цилиндров 225, задействования одного или более индикаторов 210 (например, жидкокристаллического дисплея [«LCD»]), наблюдения за функционированием забойного скребкового конвейера (AFC) 100 и т.д. Один или более датчиков 220 включают в себя, среди прочего, тензодатчик с нагружаемым штифтом, один или более чувствительных к нагрузке элементов, один или более тахометров и т.д.
[0020] В некоторых вариантах осуществления контроллер 200 включает в себя множество электрических и электронных компонентов, которые обеспечивают мощность, функциональное управление и защиту для компонентов и модулей внутри контроллера 200 и/или забойного скребкового конвейера (AFC) 100. Например, контроллер 200 включает в себя, среди прочего, блок 250 обработки (например, микропроцессор, микроконтроллер или другое подходящее программируемое устройство), запоминающее устройство 255, блоки 260 ввода и блоки 265 вывода. Блок 250 обработки включает в себя, среди прочего, блок 270 управления, арифметическо-логическое устройство (arithmetic logic unit, «ALU») 275 и множество регистров 280 (изображенных в качестве группы регистров на Фиг. 2) и реализован с использованием известной компьютерной архитектуры, такой как видоизмененная Гарвардская архитектура, архитектура фон Неймана и т.д. Блок 250 обработки, запоминающее устройство 255, блоки 260 ввода и блоки 265 вывода, а также различные модули, подключенные к контроллеру 200, подключены посредством одной или более шин управления и/или данных (например, общей шины 285). Шины управления и/или данных показаны в целом на Фиг. 2 для иллюстративных целей. Использование одной или более шин управления и/или данных для взаимного соединения и осуществления связи между различными модулями и компонентами должно быть известно специалисту в данной области техники в свете настоящего изобретения, описанного в данном документе. В некоторых вариантах осуществления контроллер 200 реализован частично или полностью на полупроводниковом кристалле, является программируемой вентильной матрицей (field-programmable gate array, «FPGA»), является специализированной интегральной схемой («ASIC») и т.д.
[0021] Запоминающее устройство 255 включает в себя, например, область хранения программ и область хранения данных. Область хранения программы и область хранения данных могут включать в себя сочетания различных типов запоминающих устройств, таких как постоянное запоминающее устройство (read-only memory, «ROM»), запоминающее устройство с произвольным доступом (random access memory, «RAM») (например, динамическое RAM [dynamic RAM, «DRAM»], синхронное DRAM [synchronous DRAM, «SDRAM»] и т.д.), электрически стираемое программируемое постоянное запоминающее устройство (electrically erasable programmable read-only memory, «EEPROM»), флэш-память, жесткий диск, SD-карту или другие подходящие магнитные, оптические, физические или электронные запоминающие устройства или структуры данных. Блок 250 обработки подключен к запоминающему устройству 255 и исполняет команды программного обеспечения, которые выполнены с возможностью хранения в запоминающем устройстве (RAM) с произвольным доступом запоминающего устройства 255 (например, в течение исполнения), постоянном запоминающем устройстве (ROM) запоминающего устройства 255 (например, в целом на постоянной основе) или другом постоянном считываемом компьютером носителе, таком как другое запоминающее устройство или диск. Программное обеспечение, содержащееся в реализации забойного скребкового конвейера (AFC) 100, может быть сохранено в запоминающем устройстве 255 контроллера 200. Программное обеспечение включает в себя, например, встроенное микропрограммное обеспечение, одно или более приложений, программных данных, фильтры, правила, один или более программных модулей и другие исполняемые команды. Контроллер 200 выполнен с возможностью извлечения из запоминающего устройства и исполнения, среди прочего, команд, относящихся к процессам и способам управления, описанным в данном документе. В других конструктивных вариантах контроллер 200 включает в себя дополнительные, меньшего количества или другие компоненты.
[0022] Модуль 230 параметров или приводного механизма подключен к или присоединен к двигателям и приводам 240, 245, которые соединены с первой звездочкой и/или второй звездочкой. Модуль 230 параметров подключен к или входит в состав, например, одного или более переключателей скоростей. Модуль 230 параметров выполнен с возможностью приема сигналов, связанных с одним или более параметрами (например, током, напряжением, коэффициентом мощности, крутящим моментом, скоростью, входной мощностью, выходной мощностью и т.д.) двигателей 240, 245. В некоторых вариантах осуществления модуль 230 параметров принимает сигналы, относящиеся к параметрам двигателей. В других вариантах осуществления модуль 230 параметров включает в себя или подключен к одному или более датчикам 220 для считывания параметров двигателя.
[0023] Управление двигателями 240, 245 осуществляется посредством сигналов управления, принятых от контроллера 200 или другого связанного контроллера. Двигатели также соединены с редукторами для уменьшения скорости вращения двигателя до скорости вращения, подходящей для звездочек и конвейера. В некоторых вариантах реализации контроллер 200 выполнен с возможностью автономного управления двигателями и забойным скребковым конвейером (AFC) с использованием датчиков 220 и одной или более сохраненных программ или модулей. В других вариантах реализации контроллер 200 выполнен с возможностью управления двигателями и забойным скребковым конвейером (AFC) на основе сочетания ручного ввода и средств автоматического управления. Один или более гидравлических цилиндров 225 также принимают сигналы управления от контроллера 200 и выборочно выдвигают раму концевой станции (например, изменяют положение одного или более гидравлических цилиндров, первой звездочки, второй звездочки и т.д.) на основе сигналов управления от контроллера 200. Контроллер 200 также наблюдает за двигателями и одним или более гидравлическими цилиндрами 225 для определения связанных характеристик. Например, контроллер 200 может наблюдать за или считывать электрические характеристики упомянутого одного или более двигателей, положение одного или более гидравлических цилиндров 225 (например, выдвижение упомянутого одного или более гидравлических цилиндров) и т.д. Несмотря на то, что показан одиночный контроллер, в других конструктивных вариантах контроллер 200 может быть разделен на множество контроллеров. Например, контроллер 200 может быть разделен на консолидированный блок управления (consolidated control unit, «CCU»), программируемый блок управления (programmable control unit, «PCU») и т.д. Консолидированный блок (CCU) управления может быть помещен во взрывозащищенный корпус и обеспечивает управление системой конвейера. Программируемый блок (PCU) управления является искробезопасной системой, которая может быть сопряжена с консолидированным блоком (CCU) управления для, среди прочего, остановки, препятствия, прекращения и т.д. функционирования конвейера.
[0024] Модуль 205 пользовательского интерфейса используется для управления или наблюдения за забойным скребковым конвейером (AFC) или горнодобывающей системой. Например, модуль 205 пользовательского интерфейса функционально соединен с контроллером 200 для управления скоростью конвейера, скоростью упомянутого одного или более двигателей и т.д. Модуль 205 пользовательского интерфейса может включать в себя сочетание устройств цифрового и аналогового ввода или вывода, требуемых для достижения необходимого уровня управления и наблюдения за забойным скребковым конвейером (AFC). Например, модуль 205 пользовательского интерфейса может включать в себя устройства отображения и ввода, такие как устройство отображения с сенсорным экраном, одна или более ручек, номеронабиратели, переключатели, кнопки и т.д. Устройство отображения является, например, жидкокристаллическим дисплеем (liquid crystal display, «LCD»), светодиодным (light-emitting diode, «LED») дисплеем, органическим LED (organic LED, «OLED») дисплеем, электролюминесцентным дисплеем (electroluminescent display, «ELD»), дисплеем на основе эффекта эмиссии электронов с поверхностной проводимостью (surface-conduction electron-emitter display, «SED»), полевым эмиссионным дисплеем (field emission display, «FED»), жидкокристаллическим дисплеем (LCD) на основе тонкопленочных транзисторов («TFT») и т.д. В других конструктивных вариантах устройство отображения является AMOLED-дисплеем (органическим жидкокристаллическим дисплеем с активной матрицей) Высокого качества. Модуль 205 пользовательского интерфейса может также быть выполнен с возможностью отображения состояний или данных, связанных с забойным скребковым конвейером (AFC) в режиме реального времени или по существу реального времени. Например, модуль 205 пользовательского интерфейса выполнен с возможностью отображения измеренных электрических характеристик забойного скребкового конвейера (AFC), статуса забойного скребкового конвейера (AFC), натяжений цепи, состояний неисправности (например, провисающая цепь, цепь с нулевым натяжением и т.д.), количество добытого материала на конвейере и т.д. В некоторых вариантах реализации управление модулем 205 пользовательского интерфейса осуществляется совместно с одним или более индикаторами 210 (например, светодиодами (LED)) для предоставления визуальных указаний статуса или состояний забойного скребкового конвейера (AFC).
[0025] Обобщенная иллюстрация конвейера 300 для горнодобывающей системы показана на Фиг. 3A. Конвейер 300 включает в себя первую звездочку или звездочку 305 главного створа, вторую звездочку или звездочку 310 хвостового створа, цепь 315, первый гидравлический цилиндр 320, второй гидравлический цилиндр 325 и интересующий участок цепи или «опасный участок» 330. Участок 330 иллюстративно показан в качестве области между верхней мертвой точкой (top dead center, «TDC») 335 второй звездочки 310 и точкой 340 приложения нагрузки (то есть, точкой на верхней части цепи, в которой материал загружается на конвейер). Участок 330 представляет собой часть цепи 315, которая, наиболее вероятно, испытывает состояние провисающей цепи (то есть, малое натяжение). Натяжение цепи 315 на участке 330 может быть определено и использовано для управления взаимными положениями первой звездочки 305 и второй звездочки 310. Взаимные положения звездочек могут быть изменены посредством управления первым гидравлическим цилиндром 320 и вторым гидравлическим цилиндром 325. На Фиг. 3B и 3C показаны конвейеры согласно некоторым вариантам осуществления настоящего изобретения, которые включают в себя один гидравлический цилиндр, соединенный либо с первой звездочкой 305, либо со второй звездочкой 310.
[0026] В реальных вариантах реализации забойных скребковых конвейеров (AFC) для горнодобывающего применения конвейер и цепь не образованы полностью параллельными верней и нижней частями цепи, как изображено на Фиг. 3A, 3B и 3C. Скорее всего, например, рама станции забойного скребкового конвейера (AFC) закруглена возле звездочек и поднимает цепь прежде, чем возвратить цепь на высоту или уровень, на котором должен быть загружена порода. Форма рамы станции является результатом размера звездочек, которые используются в горнодобывающих применениях. В некоторых вариантах осуществления звездочка имеет приблизительно один метр в диаметре. В результате размера звездочек цепь свешивается от рамы станции под фиксированным углом, как изображено на Фиг. 4. На Фиг. 4 показана упрощенная версия 400 рамы 105 концевой станции забойного скребкового конвейера (AFC) 100. На Фиг. 4 показана звездочка 405, подшипник (или вал) 410, чувствительный к нагрузке элемент 415, нижняя часть цепи 420 и верхняя часть цепи 425. Вследствие геометрии рамы 105 концевой станции верхняя часть цепи 425 отходит от звездочки 405 под первым углом, θ1. Первый угол, θ1, является по существу фиксированным углом.
[0027] Силы, связанные с рамой 400 станции Фиг. 4, показаны на Фиг. 5. Сила 430 противодействия звездочки (например, сила противодействия подшипника звездочки) рамы 400 станции показана в качестве вектора, имеющего амплитуду и угол, θ2. Поскольку геометрия рамы 400 станции является по существу фиксированной, то угол, θ2, силы противодействия также является по существу фиксированным. Как таковая, будет изменять только амплитуда силы противодействия. Тогда вектор силы противодействия образован амплитудой силой противодействия и фиксированным углом, θ2, силы противодействия. Сила от нижней части цепи 435 показана в качестве вектора, имеющего некоторую амплитуду и некоторый угол. Угол силы от нижней части цепи 435 по существу параллелен основанию в системе отсчета рамы 400 станции. Как таковой, угол вектора силы для нижней части цепи 435 является по существу нулевым. Сила от верхней части цепи 440 также показана в качестве вектора, имеющего некоторую амплитуду и некоторый угол. Как было указано ранее, угол, θ1, под которым цепь отходит от звездочки 405, является по существу фиксированным.
[0028] Сила 430 противодействия звездочки может быть измерена с использованием чувствительного к нагрузке элемента 415. Поскольку геометрия рамы 400 станции является фиксированной, то чувствительный к нагрузке элемент 415 может быть помещен по отношению к звездочке 405 и подшипникам 410 так, чтобы он был по существу перпендикулярен углу силы 430 противодействия звездочки. Посредством реализации чувствительного к нагрузке элемента 415 таким образом выходной сигнал чувствительного к нагрузке элемента 415 является непосредственным измерением силы 430 противодействия звездочки. В некоторых вариантах осуществления чувствительный к нагрузке элемент реализован по-другому, и контроллер 200 вычисляет силу 430 противодействия звездочки из выходного сигнала чувствительного к нагрузке элемента 415 (то есть, чувствительный к нагрузке элемент 415 не помещается перпендикулярно по отношению к углу силы 430 противодействия звездочки).
[0029] Сила от нижней части цепи 435 определяется на основе некоторой характеристики приводного механизма или двигателя для звездочки 405. Например, один или более датчиков могут быть реализованы в или присоединены к двигателю для звездочки 405. Датчики выполнены с возможностью предоставления контроллеру 200 сигналов, которые относится к характеристикам приводного механизма, таким как напряжение, ток, скорость, крутящий момент, мощность и т.д. В некоторых вариантах осуществления непосредственно измеряется крутящий момент или крутящий момент на валу, связанный с двигателем. В других вариантах осуществления для вычисления крутящего момента или крутящего момента на валу двигателя используется скорость двигателя и мощность (например, напряжение, умноженное на ток) двигателя. Как только определен крутящий момент или крутящий момент на валу двигателя, может быть вычислена или определена сила, связанная с нижней частью цепи 435. Например, звездочка 405 имеет фиксированный и известный диаметр (например, приблизительно один метр в диаметре). С использованием крутящего момента и известного радиуса звездочки 405 (то есть, радиус является половиной диаметра) может быть определена сила, например, в нижней мертвой точке (ottom-dead-center, «BDC») звездочки 405. Данная определенная сила представляет собой силу от нижней части цепи 435.
[0030] Сила от верхней части цепи 440 может быть определена на основе силы 430 противодействия звездочки и силы от нижней части цепи 435. Как показано на Фиг. 6, векторное суммирование силы 430 противодействия звездочки и силы от нижней части цепи 435 образует вектор 440 силы для верхней части цепи. После того, как сила от верхней части цепи 435 вычислена или определена, данная сила может использоваться для управления гидравлическими цилиндрами и взаимными положениями звездочек конвейера. В некоторых вариантах осуществления сила от верхней части цепи 435 используется для управления гидравлическими цилиндрами и взаимными положениями звездочек конвейера. В других вариантах осуществления сила от верхней части цепи 435 используется для определения натяжения в верхней части цепи. Затем натяжение в верхней части цепи используется для управления гидравлическими цилиндрами и взаимными положениями звездочек конвейера. Например, на основе определенного натяжения в верхней части цепи контроллер 200 выполнен с возможностью автоматического управления положением одного или более гидравлических цилиндров для управления взаимным расстоянием между двумя звездочками.
[0031] В частности, управление одним или более гидравлическими цилиндрами 225 осуществляется для увеличения или уменьшения расстояния между первой звездочкой и второй звездочкой для компенсации натяжения в цепи. Посредством автоматического управления положением гидравлических цилиндров 225 натяжение в цепи в течение функционирования забойного скребкового конвейера (AFC) может быть постоянно и автоматически изменяться или регулироваться для поддержания натяжения цепи в пределах предварительно определенного или необходимого интервала (например, который уменьшает повреждение или износ в забойном скребковом конвейере (AFC)). Дополнительно, автоматическое управление положением гидравлических цилиндров 225, как это описано, позволяет контроллеру 200 реализовать множество механизмов улучшения функционирования забойного скребкового конвейера (AFC). Например, контроллер 200 может также выключить забойный скребковый конвейер (AFC) в случае потери натяжения цепи, потери гидравлического давления, незапланированного изменения положения гидравлического цилиндра, когда предполагается, что положение гидравлического цилиндра было изменено, но никакого изменения обнаружено не было, и т.д.
[0032] На Фиг. 7 показан процесс 500 управления забойным скребковым конвейером (AFC). Процесс 500 начинается с приема контроллером 200 одного или более сигналов от одного или более чувствительных к нагрузке элементов (этап 505). Чувствительные к нагрузке элементы расположены относительно первой звездочки, второй звездочки или каждой из первой звездочки и второй звездочки. Чувствительные к нагрузке элементы, например, расположенные перпендикулярно по отношению к силе противодействия на подшипниках звездочки. Поскольку верхняя и нижняя части цепи взаимодействуют со звездочкой под фиксированными углами входа и выхода, то угол силы противодействия, θ2, является фиксированным. В результате изменяется только амплитуда силы противодействия. Вектор силы противодействия звездочки образован амплитудой силы противодействия и фиксированным углом силы противодействия. После приема одного или более сигналов от одного или более чувствительных к нагрузке элементов контроллер 200 определяет амплитуду силы противодействия звездочки (этап 510).
[0033] Контроллер 200 также принимает сигнал от датчика, относящегося к приводному механизму конвейера (этап 515). Приводной механизм является, например, двигателем, и сигнал от датчика является некоторой характеристикой двигателя, такой как напряжение в двигателе, ток в двигателе, скорость двигателя, мощность двигателя, крутящий момент двигателя и т.д. На основе данного сигнала, принятого от датчика, контроллер 200 определяет некоторую характеристику приводного механизма (этап 520). В некоторых вариантах осуществления контроллер 200 принимает множество сигналов от датчика или сигналов от множества датчиков (например, указывающих скорость двигателя, мощность двигателя, ток в двигателе и т.д.). Упомянутая характеристика приводного механизма является, например, крутящим моментом или крутящим моментом на валу. В некоторых вариантах осуществления крутящий момент на валу вычисляется на основе скорости вращения двигателя и мощности двигателя. В других вариантах осуществления крутящий момент на валу измеряется непосредственно или определяется на основе тока в двигателе.
[0034] Затем контроллер вычисляет силу, действующую на нижнюю часть цепи, на основе упомянутой характеристики приводного механизма (этап 525). Например, диаметр звездочки является фиксированным (например, приблизительно один метр в диаметре). С использованием определенного крутящего момента на валу звездочки и известного диаметра (и радиуса) звездочки может быть вычислена сила от нижней части цепи. Сила от нижней части цепи по существу параллельна, например, основанию (например, угол приблизительно в 0°). Амплитуда силы от нижней части цепи и ее угол образуют вектор силы для нижней части цепи.
[0035] Вектор, соответствующий амплитуде и углу силы от нижней части цепи, и вектор, соответствующий силе противодействия звездочки, могут быть суммированы (то есть, быть векторным суммированием) для вычисления силы от верхней части цепи (этап 530). Сила от верхней части цепи является результатом натяжения в верхней части цепи. Контроллер 200 выполнен с возможностью использования соотношения между силой и натяжением в верхней части цепи для определения натяжения верхней части цепи (этап 535). Например, соотношение между силой от верхней части цепи и натяжением в верхней части цепи может быть сохранено в запоминающем устройстве (например, запоминающем устройстве 255). Данное соотношение может быть сохранено в качестве одной или более функций, одной или более поисковых таблиц (look up table, «LUT») или в качестве набора пороговых величин, с которыми сравниваются эти силы. В некоторых вариантах осуществления после того, как определена сила от верхней части цепи, для определения натяжения в верхней части цепи используется Ньютоновская физика (например, суммирование сил). В других вариантах осуществления натяжение в верхней части цепи выводится из амплитуды силы от верхней части цепи.
[0036] После этапа 535 контроллер 200 использует определенное натяжение в верхней части цепи для управления положением звездочки конвейера. Управление положением звездочки осуществляется посредством управления положением гидравлического цилиндра, присоединенного к звездочке. Как описано выше, в некоторых вариантах осуществления к одной или обеим из звездочек присоединен гидравлический цилиндр. Линейный датчик может использоваться для определения положения гидравлического цилиндра (например, положения поршня внутри гидравлического цилиндра). Если, на основе натяжения в верхней части цепи, натяжение должно быть увеличено или уменьшено; то положение гидравлического цилиндра может быть отрегулировано. Посредством регулирования положения гидравлического цилиндра взаимные положения двух звездочек конвейера (например, звездочек главного створа и хвостового створа) могут быть увеличены или уменьшены (то есть, расстояние между звездочками может быть увеличено или уменьшено). После использования гидравлического цилиндра для управления взаимными положениями звездочки процесс 500 возвращается на этап 505, чтобы снова определить натяжение в верхней части цепи. В некоторых вариантах осуществления натяжение в верхней части цепи постоянно и постепенно увеличивается для достижения или поддержания необходимого уровня натяжения. Например, с изменением точки приложения нагрузки конвейера (например, при перемещении выемочного комбайна вдоль забоя шахты) натяжение в верхней части цепи от приложения нагрузки постоянно изменяется. Постоянное изменение взаимных положений звездочек конвейера позволяет контроллеру 200 компенсировать эти постоянные изменения натяжения.
[0037] Дополнительно, методики управления, описанные выше, могут быть применены к предварительному натяжению забойного скребкового конвейера (AFC). В таких примерных вариантах сила противодействия звездочки измеряется при неподвижной цепи. Результирующая сила от верхней части цепи относится к истинному предварительному натяжению цепи. Затем предварительное натяжение может подвергаться регулировке по мере необходимости для достижения необходимого уровня предварительного натяжения.
[0038] Таким образом, настоящее изобретение может в целом предложить, среди прочего, системы, способы, устройства и считываемые компьютером носители для управления функционированием горнодобывающей системы на основе силы противодействия звездочки и определенного натяжения цепи.
Изобретение относится к управлению конвейером, таким как забойный скребковый конвейер или консольный перегружатель. Техническим результатом является автоматическое управление натяжением цепи. Конвейер включает в себя звездочку, цепь, приводной механизм, гидравлический цилиндр и контроллер. Цепь присоединена к звездочке и имеет верхнюю часть цепи и нижнюю часть цепи. Приводной механизм соединен со звездочкой и выполнен с возможностью приведения в движение звездочки. Контроллер включает в себя блок обработки и запоминающее устройство. Контроллер выполнен с возможностью приема первого сигнала, относящегося к некоторой характеристике приводного механизма, приема второго сигнала, относящегося к силе противодействия звездочки, вычисления натяжения верхней части цепи на основе первого сигнала и второго сигнала и генерирования сигнала управления для управления положением гидравлического цилиндра на основе определенного натяжения верхней части цепи. 3 н. и 18 з.п. ф-лы, 7 ил.
1. Конвейер для горнодобывающей системы, содержащий:
первую звездочку, имеющую первое положение;
вторую звездочку, имеющую второе положение, причем первое положение отделено от второго положения на некоторое расстояние;
цепь, связанную с первой звездочкой и второй звездочкой, причем цепь имеет верхнюю часть цепи и нижнюю часть цепи;
приводной механизм, соединенный с одной из первой звездочки или второй звездочки, причем приводной механизм выполнен с возможностью приведения в движение одной из первой звездочки или второй звездочки;
датчик, выполненный с возможностью генерирования первого сигнала, относящегося к некоторой характеристике приводного механизма;
чувствительный к нагрузке элемент, выполненный с возможностью генерирования второго сигнала, относящегося к силе противодействия одной из первой звездочки или второй звездочки;
гидравлический цилиндр; и
контроллер, включающий в себя блок обработки и запоминающее устройство, причем контроллер выполнен с возможностью
приема первого сигнала от датчика,
приема второго сигнала от чувствительного к нагрузке элемента,
вычисления натяжения верхней части цепи на основе первого сигнала и второго сигнала, и
генерирования сигнала управления для управления положением гидравлического цилиндра на основе определенного натяжения верхней части цепи для управления упомянутым расстоянием между первой звездочкой и второй звездочкой.
2. Конвейер по п. 1, в котором приводной механизм является двигателем.
3. Конвейер по п. 2, в котором упомянутая характеристика включает в себя ток в двигателе или крутящий момент двигателя.
4. Конвейер по п. 1, в котором контроллер дополнительно выполнен с возможностью вычисления силы от нижней части цепи на основе первого сигнала.
5. Конвейер по п. 4, в котором контроллер дополнительно выполнен с возможностью вычисления векторной суммы силы от нижней части цепи и силы противодействия одной из первой звездочки или второй звездочки для определения силы от верхней части цепи.
6. Конвейер по п. 5, в котором натяжение верхней части цепи определено на основе силы от верхней части цепи.
7. Конвейер по п. 1, в котором угол силы противодействия одной из первой звездочки или второй звездочки является фиксированным.
8. Конвейер по п. 7, в котором чувствительный к нагрузке элемент расположен перпендикулярно к углу силы противодействия одной из первой звездочки и второй звездочки.
9. Способ управления натяжением конвейерной цепи, имеющей верхнюю часть цепи и нижнюю часть цепи, причем способ содержит этапы, на которых:
принимают первый сигнал, относящийся к характеристике приводного механизма, причем приводной механизм выполнен с возможностью приведения в движение звездочки;
принимают второй сигнал, относящийся к силе противодействия звездочки;
вычисляют, с помощью процессора, натяжение верхней части цепи конвейерной цепи на основе первого сигнала и второго сигнала; и
генерируют сигнал управления для управления положением гидравлического цилиндра на основе вычисленного натяжения верхней части цепи.
10. Способ по п. 9, в котором приводной механизм является двигателем.
11. Способ по п. 10, в котором упомянутая характеристика включает в себя ток в двигателе или крутящий момент двигателя.
12. Способ по п. 9, дополнительно содержащий этап, на котором рассчитывают силу от нижней части цепи на основе первого сигнала.
13. Способ по п. 12, дополнительно содержащий этап, на котором вычисляют векторную сумму силы от нижней цепи и силы противодействия звездочки, и
определяют силу от верхней части цепи на основе векторной суммы.
14. Способ по п. 9, в котором угол силы противодействия звездочки является фиксированным.
15. Конвейер для горнодобывающей системы, содержащий:
звездочку;
цепь, присоединенную к звездочке, причем цепь имеет верхнюю часть цепи и нижнюю часть цепи;
приводной механизм, соединенный со звездочкой, причем приводной механизм выполнен с возможностью приведения в движение звездочки;
гидравлический цилиндр; и
контроллер, включающий в себя блок обработки и запоминающее устройство, причем контроллер выполнен с возможностью:
приема первого сигнала, относящегося к характеристике приводного механизма,
приема второго сигнала, относящегося к силе противодействия звездочки,
вычисления натяжения верхней части цепи на основе первого сигнала и второго сигнала, и
генерирования сигнала управления для управления положением гидравлического цилиндра на основе определенного натяжения верхней части цепи.
16. Конвейер по п. 15, в котором приводной механизм является двигателем.
17. Конвейер по п. 16, в котором упомянутая характеристика включает в себя ток в двигателе или крутящий момент двигателя.
18. Конвейер по п. 15, в котором контроллер дополнительно выполнен с возможностью вычисления силы от нижней части цепи на основе первого сигнала.
19. Конвейер по п. 18, в котором контроллер дополнительно выполнен с возможностью вычисления векторной суммы силы от нижней цепи и силы противодействия одной из первой звездочки или второй звездочки для определения силы от верхней части цепи.
20. Конвейер по п. 19, в котором натяжение верхней части цепи вычислено на основе силы, действующей на верхнюю часть цепи.
21. Конвейер по п. 15, в котором угол силы противодействия одной из первой звездочки или второй звездочки является фиксированным.
| RU 2012132477 A, 27.01.2014 | |||
| US 4284192 A1, 18.08.1981 | |||
| US 5641058 A, 24.06.1997 | |||
| СПОСОБ ПОЛУЧЕНИЯ НАНОРАЗМЕРНОГО ПОРОШКА ГАММА-ОКСИДА АЛЮМИНИЯ | 2012 |
|
RU2493102C1 |

