Уровень техники
[0001] Настоящее изобретение относится к конвейеру, такому как скребковый забойный конвейер (armored face conveyor - AFC) или консольный перегружатель (beam stage loader - BSL), который включает в себя устройство, ограничивающее крутящий момент.
Сущность изобретения
[0002] Системы разработки месторождений длинными забоями включают в себя, помимо прочего, конвейер, такой как AFC или BSL, для транспортировки добытого материала (например, каменного угля) из зоны, где данный материал добывают, в зону для обработки (например, дробления, хранения и др.). Конвейеры могут включать в себя первую звездочку и вторую звездочку, вокруг которых расположена цепь. Цепь приводится в движение посредством одного или более приводных механизмов (например, электродвигателя основного штрека, электродвигателя хвостового штрека и др.), и перемещение цепи вокруг звездочек вынуждает конвейер перемещать добытый материал. Конвейер может включать в себя устройство, ограничивающее крутящий момент, подсоединенное между приводным механизмом и звездочкой. Упомянутое устройство, ограничивающее крутящий момент, предотвращает приложение избыточного (например, потенциально повреждающего) крутящего момента к звездочке или цепи.
[0003] Упомянутое устройство, ограничивающее крутящий момент, приспособлено прежде всего для предохранения вращающегося оборудования от чрезмерных ударных нагрузок, связанных с внезапными ударами, чтобы уменьшить вероятность повреждений цепи в таких случаях. Устройство, ограничивающее крутящий момент, включает в себя наружную муфту, которая соединена со звездочкой, и внутренний вал, который соединен с редуктором или трансмиссией. Наружная муфта зафиксирована на внутреннем валу посредством гидравлического давления. Когда заданная величина крутящего момента превышена, давление в наружной муфте является недостаточным для обеспечения передачи движения от внутреннего вала. В результате наружная муфта проскальзывает, что позволяет внутреннему валу продолжать вращаться, хотя цепь конвейера остановлена. Вращение внутреннего вала и редуктора продолжается за счет электромагнитного момента, момента инерции, создаваемого приводным механизмом, сцеплением и редуктором и др.
[0004] В одном варианте осуществления, настоящее изобретение предусматривает конвейер для системы разработки месторождений, который включает в себя звездочку, устройство, ограничивающее крутящий момент, приводной механизм, первый датчик, второй датчик и контроллер. Упомянутое устройство, ограничивающее крутящий момент, включает в себя первую часть и вторую часть. Упомянутая первая часть и упомянутая вторая часть выполнены с возможностью вращения относительно друг друга, когда предел крутящего момента упомянутого устройства, ограничивающего крутящий момент, превышен. Упомянутый приводной механизм через устройство, ограничивающее крутящий момент, соединен с упомянутой звездочкой и выполнен с возможностью приведения в движение упомянутой звездочки. Первый датчик выполнен с возможностью генерирования первого сигнала, связанного с положением упомянутой первой части устройства, ограничивающего крутящий момент. Второй датчик выполнен с возможностью генерирования второго сигнала, связанного с положением упомянутой второй части устройства, ограничивающего крутящий момент. Упомянутый контроллер включает в себя процессор и память. Контроллер выполнен с возможностью прима первого сигнала из второго датчика, определения первой величины для положения упомянутой первой части устройства, ограничивающего крутящий момент, на основе первого сигнала, приема второго сигнала из второго датчика, определения величины для положения упомянутой второй части устройства, ограничивающего крутящий момент, на основе второго сигнала, определения разности между упомянутой первой величиной для положения первой части устройства, ограничивающего крутящий момент, и упомянутой второй величиной для положения второй части устройства, ограничивающего крутящий момент, определения величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, на основе упомянутой разности, и генерирования сигнала управления для управления работой конвейера на основе упомянутой величины проскальзывания между первой часть устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
[0005] В другом варианте осуществления, настоящее изобретение предусматривает способ управления работой конвейера для системы разработки месторождения. Упомянутый способ включает прием первого сигнала из первого датчика, связанного с положением первой части устройства, ограничивающего крутящий момент, определение первой величины для положения первой части устройства, ограничивающего крутящий момент, на основе первого сигнала, прием второго сигнала из второго датчика, связанного с положением второй части устройства, ограничивающего крутящий момент, и определение второй величины для положения второй части устройства, ограничивающего крутящий момент, на основе второго сигнала. Упомянутый способ включает также определение разности между упомянутой первой величиной для положения первой части устройства, ограничивающего крутящий момент, и упомянутой второй величиной для положения второй части устройства, ограничивающего крутящий момент, определение величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, на основе упомянутой разности, и генерирование сигнала управления для управления работой конвейера на основе упомянутой величины проскальзывания между первой часть устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
[0006] В другом варианте осуществления, настоящее изобретение предусматривает способ управления работой конвейера для системы разработки месторождения. Упомянутый способ включает определение первой величины для положения первой части устройства, ограничивающего крутящий момент, на основе сигнала первого датчика, определение второй величины для положения второй части устройства, ограничивающего крутящий момент, на основе сигнала второго датчика, определение величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, на основе разности между упомянутой первой величиной для положения первой части устройства, ограничивающего крутящий момент, и упомянутой величиной для положения второй части устройства, ограничивающего крутящий момент, и генерирование сигнала управления для управления работой конвейера на основе упомянутой величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
[0007] Прежде чем будут подробно описаны варианты осуществления изобретения, необходимо понимать, что изобретение не ограничено в своем применении деталями конфигурации и расположением элементов, выложенными в приведенном ниже описании или показанными в прилагаемых чертежах. Изобретение может иметь другие варианты осуществления и может быть реализовано или осуществлено другими способами. Кроме того, необходимо понимать, что выражения и термины, используемые в данном документе, предназначены только для описания и не должны рассматриваться как ограничивающие. Использование слов «включающий», «содержащий» или «включающий в себя» и их производных в данном документе означает включение перечисленных после этого элементов и их эквивалентов, а также дополнительных элементов. Если конкретно не указано или не ограничено как-то иначе, то термины «закреплен», «соединен», «опирается» и «связан» и их варианты используются в широком толковании и включают в себя как прямые, так и непрямые крепления, соединения, опоры и связи.
[0008] Кроме того, необходимо понимать, что варианты осуществления изобретения могут включать в себя аппаратное обеспечение, программное обеспечение и электронные элементы или модули, которые, в целях объяснения, могут быть показаны и описаны так, как если бы большинство элементов были реализованы только в аппаратном обеспечении. Однако специалисту в данной области техники, на основе прочтения данного подробного описания, будет понятно, что, в по меньшей мере одном варианте осуществления, электронные аспекты изобретения могут быть реализованы в программном обеспечении (например, хранимом на непромежуточном машиночитаемом носителе), исполняемом одним или более устройств обработки данных, таких как микропроцессор и/или специализированные интегральные схемы (application specific integrated circuit - ASIC). В связи с этим необходимо отметить, что для реализации настоящего изобретения может быть использовано множество устройств на основе аппаратного и программного обеспечения, а также множество разных структурных элементов. Например, «серверы» и «вычислительные устройства», описанные в описании, могут включать в себя одно или более устройств обработки данных, один или более модулей машиночитаемых носителей, один или более интерфейсов ввода/вывода и различные соединения (например, системную шину), соединяющие упомянутые элементы.
[0009] Независимые аспекты изобретения станут очевидными в результате рассмотрения подробного описания и прилагаемых чертежей.
Краткое описание чертежей
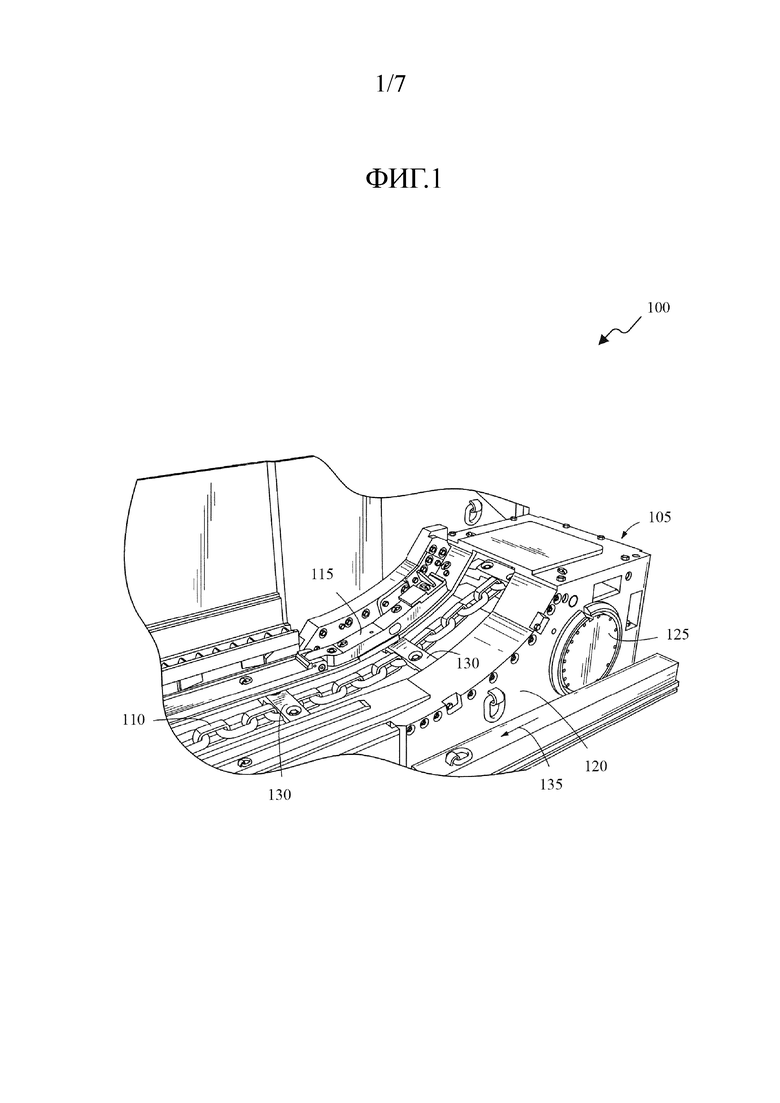
[0010] Фиг.1 показывает часть цепного конвейера, включающего в себя концевую раму.
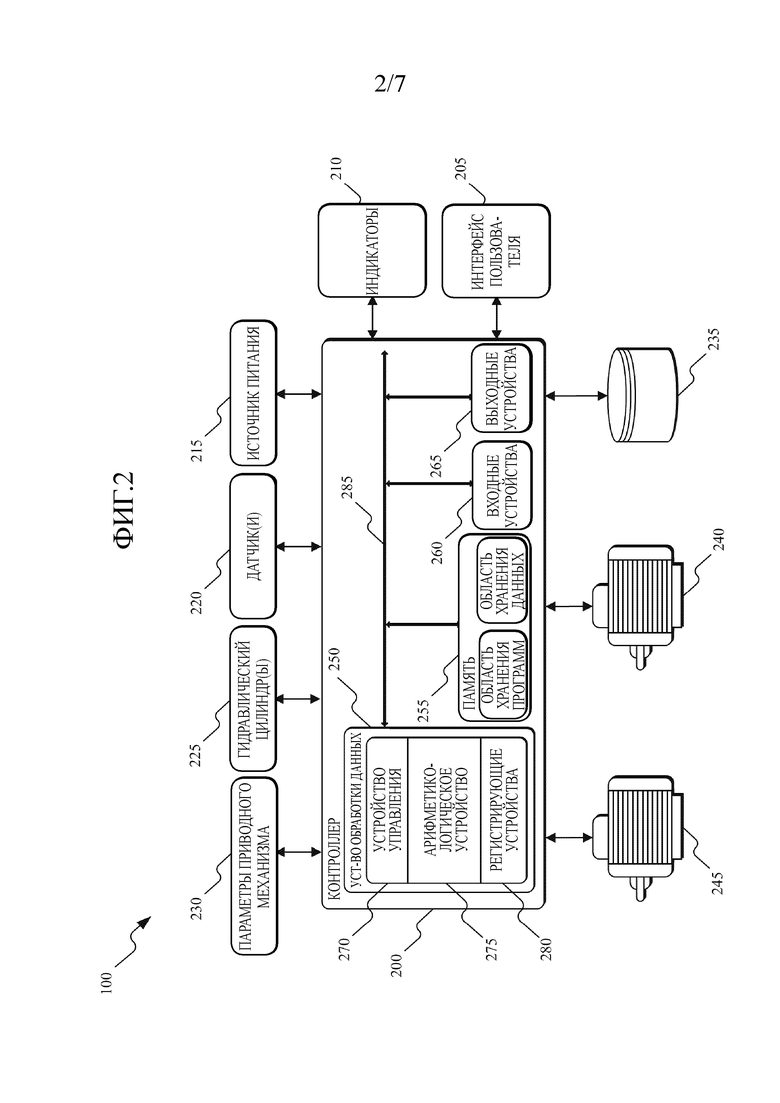
[0011] Фиг.2 показывает контроллер для цепного конвейера в соответствии с вариантом осуществления изобретения.
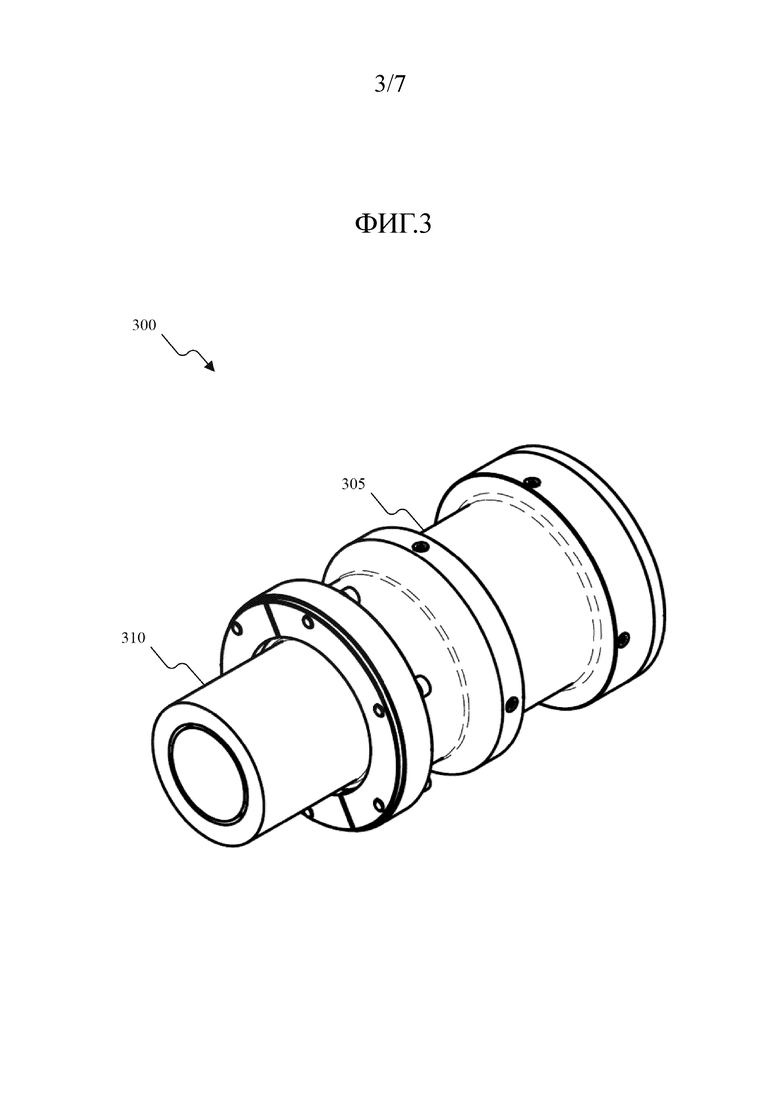
[0012] Фиг.3 показывает устройство, ограничивающее крутящий момент.
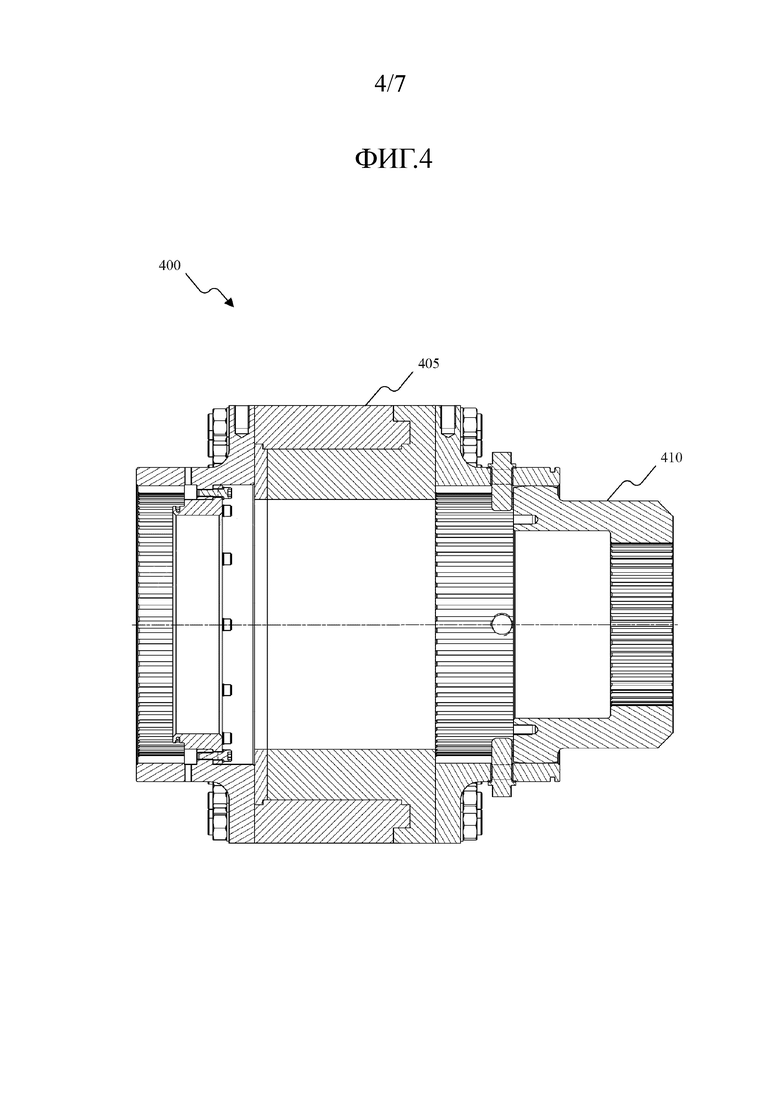
[0013] Фиг.4 показывает другое устройство, ограничивающее крутящий момент в разрезе.
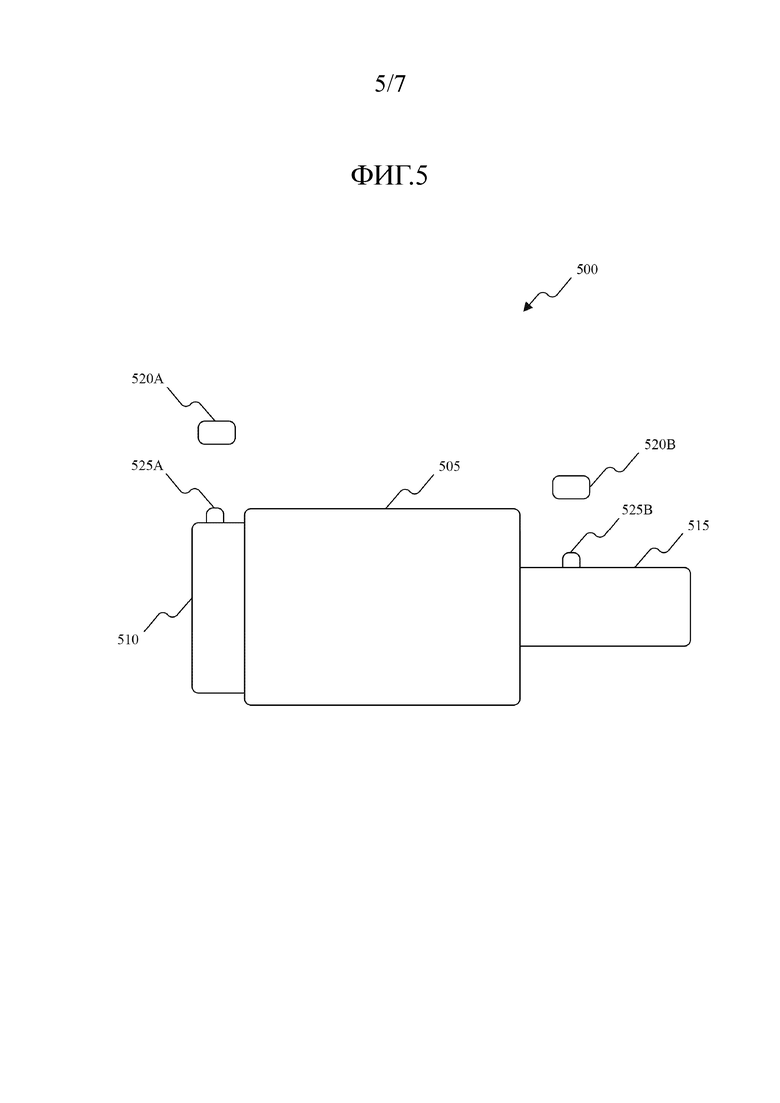
[0014] Фиг.5 показывает систему обнаружения проскальзывания в соответствии с вариантом осуществления настоящего изобретения.
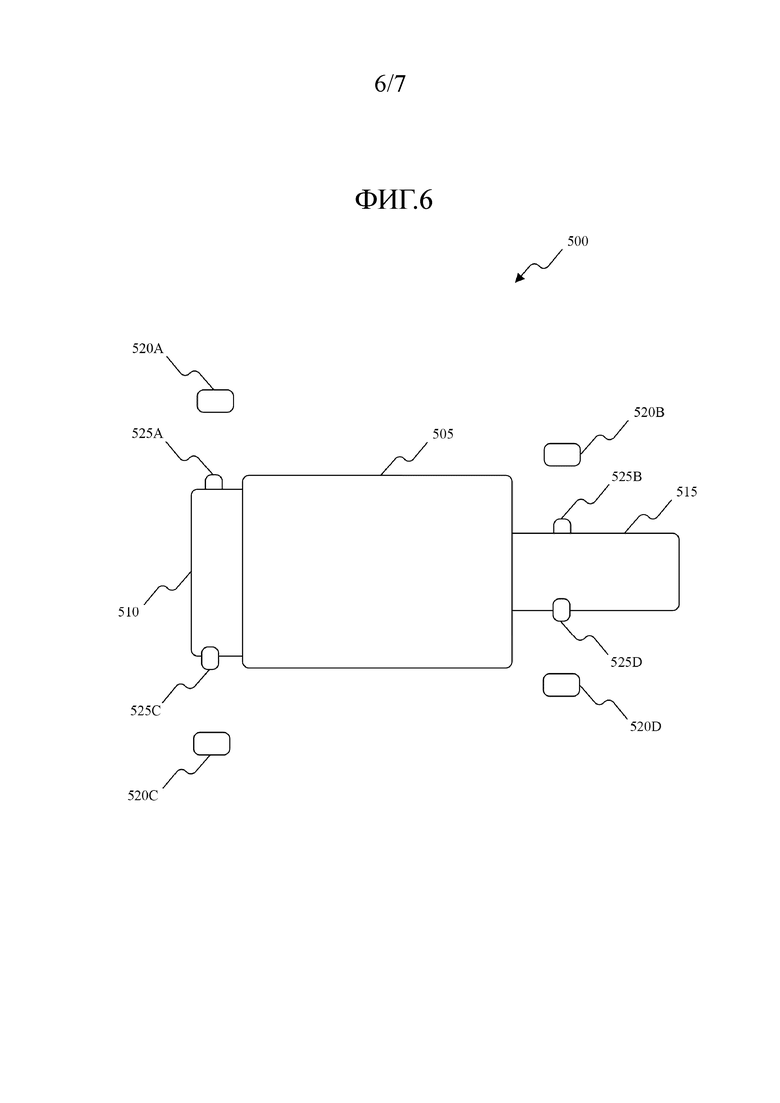
[0015] Фиг.6 показывает систему обнаружения проскальзывания в соответствии с другим вариантом осуществления настоящего изобретения.
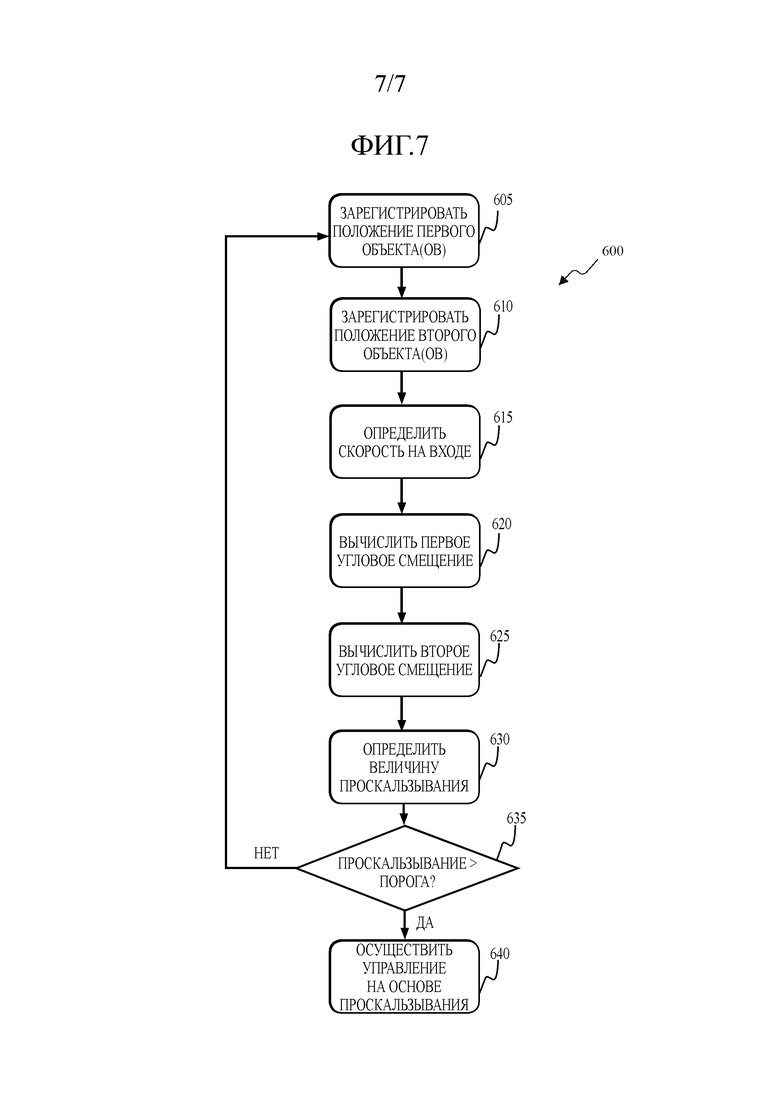
[0016] Фиг.7 представляет собой процесс обнаружения проскальзывания в соответствии с вариантом осуществления изобретения.
Подробное описание
[0017] Изобретение, описанное в данном документе, относится к управлению конвейером в системе разработки месторождения. Упомянутый конвейер включает, например, скребковые забойные конвейеры (armored face conveyor - AFC) или консольные перегружатели (beam stage loader - BSL). В целях пояснения, изобретение описано в данном документе со ссылкой на варианты осуществления, которые включают в себя AFC. AFC включают в себя звездочку, цепь, один или несколько приводных механизмов (например, электродвигателей), один или несколько гидравлических цилиндров и контроллер. Между упомянутым приводным механизмом и упомянутой звездочкой подсоединено устройство, ограничивающее крутящий момент. Упомянутое устройство, ограничивающее крутящий момент включает в себя наружную муфту и внутренний вал. Наружная муфта зафиксирована на внутреннем валу посредством гидравлического давления. Когда заданная величина крутящего момента превышена, давление в наружной муфте является недостаточным для обеспечения передачи движения от внутреннего вала, и наружная муфта проскальзывает относительно внутреннего вала. Упомянутый контроллер выполнен с возможностью или приспособлен для определения или обнаружения наличия проскальзывания в устройстве, ограничивающем крутящий момент. Обнаружение проскальзывания осуществляется посредством использования первого датчика и второго датчика. Первый датчик используется для отслеживания вращения наружной муфты устройства, ограничивающего крутящий момент. Второй датчик используется для отслеживания вращения внутреннего вала устройства, ограничивающего крутящий момент. Упомянутые датчики представляют собой, например, бесконтактные датчики. Когда наружная муфта и внутренний вал вращаются, объекты, расположенные на наружной муфте и внутреннем валу, регистрируются первым датчиком и вторым датчиком. Период времени между регистрацией упомянутых объектов используют для вычисления относительного вращения наружной муфты и внутреннего вала. Если периоды времени между регистрацией объектов на наружной муфте и внутреннем валу разные, то в устройстве, ограничивающем крутящий момент, появляется проскальзывание.
[0018] Фиг.1 показывает часть забойного конвейера 100. Конвейер 100 включает в себя возвратный конец 105, перемещающий элемент или цепь 110, которая перемещается между возвратным концом 105 и участком разгрузки системы разработки длинными забоями, и узел 115 датчиков, расположенный рядом с возвратным концом 105. Цепь 110 приводится в движение посредством приводного механизма, такого как двигатель с переменной скоростью вращения. Возвратный конец 105 включает в себя раму 120, звездочку или натяжной вал 125, закрепленный на упомянутой раме 120, и по меньшей мере один гидравлический цилиндр (не показанный). Рама 120 перемещается относительно участка разгрузки на основе выдвижения и отвода гидравлического цилиндра. Цепь 110 проходит вокруг натяжного вала 125 так, чтобы перемещаться по непрерывному контуру между упомянутым участком разгрузки и возвратным концом 105. Цепь 110 включает в себя множество ставов или пластин 130, закрепленных на цепи 110 и разнесенных на первом расстоянии в направлении 135 перемещения цепи 110.
[0019] Фиг.2 показывает контроллер 200, связанный с конвейером 100. Контроллер 200 соединен или связан с множеством дополнительных блоков или элементов, таких как блок 205 интерфейса пользователя, один или более индикаторов 210, блок 215 питания, один или более датчиков 220, один или более гидравлических цилиндров 225, блок 230 параметров приводного механизма или электродвигателя, память данных или база 235 данных, первый приводной механизм и привод 240 (например, связанный с главным забоем), и второй приводной механизм или привод 245 (например, связанный с хвостовым забоем). В некоторых вариантах осуществления, первый приводной механизм и привод 240 включает в себя первый электродвигатель и первый электропривод, а второй приводной механизм и привод 245 включает в себя второй электродвигатель и второй электропривод. В некоторых вариантах осуществления, первый электродвигатель и первый электропривод 240 и второй электродвигатель и второй электропривод 245 каждый включает в себя коммутационные узлы. Варианты осуществления изобретения, описанные в данном документе, описаны применительно к приводным механизмам и приводам, представляющим собой электродвигатели и электроприводы. Упомянутые один или более датчиков 220 представляют собой, например, тахометры, приспособленные для измерения или регистрации характеристики первой звездочки и/или второй звездочки (например, углового положения звездочки, скорости вращения звездочки, углового ускорения звездочки и др.), бесконтактные датчики, приспособленные для измерения или регистрации характеристики упомянутого устройства, ограничивающего крутящий момент, и/или цепи (например, положения цепи, скорости цепи, ускорения цепи и др.), датчики мощности внутри конвейера 100, приспособленные для измерения или регистрации электрической характеристики (например, тока, напряжения, коэффициента мощности, крутящего момента, скорости, входной мощности, выходной мощности и др.), динамометрические элементы и др. Контроллер 200 включает в себя комбинации аппаратного обеспечения и программного обеспечения, которые запрограммированы, приспособлены и/или выполнены с возможностью, помимо прочего, управления работой конвейера 100, управления положением упомянутого одного или более гидравлических цилиндров 225, активации упомянутого одного или более индикаторов 210 (например, жидкокристаллического дисплея [liquid crystal display - LCD]), осуществления контроля за работой конвейера 100 и др.
[0020] В некоторых вариантах осуществления, контроллер 200 включает в себя множество электрических и электронных элементов, которые обеспечивают электропитание, оперативное управление и защиту для элементов и блоков внутри контроллера 200 и/или конвейера 100. Например, контроллер 200 включает в себя, помимо прочего, устройство 250 обработки данных (например, микропроцессор, микроконтроллер или другое пригодное программируемое устройство), память 255, входные устройства 260 и выходные устройства 265. Устройство 250 обработки данных включает в себя, помимо прочего, устройство 270 управления, арифметико-логическое устройство (arithmetic logic unit - ALU) 275 и множество регистрирующих устройств 280 (показанных на фиг.2 в виде группы регистрирующих устройств) и реализовано с использованием известной архитектуры компьютера, такой как модифицированная гарвардская архитектура, фон-неймановская архитектура и др. Устройство 250 обработки данных, память 255, входные устройства 260 и выходные устройства 265, а также различные блоки, соединенные с контроллером 200, подсоединены посредством одной или более управляющих и/или информационных шин (например, общей шины 285). Упомянутые управляющие и/или информационные шины показаны в целом на фиг.2 в целях объяснения. Использование одной или более управляющих и/или информационных шин для взаимного соединения между и связи между различными блоками и элементами известно специалисту в данной области техники в связи с изобретением, описанным в данном документе. В некоторых вариантах осуществления, контроллер 200 реализован частично или полностью на полупроводниковом кристалле, представляет собой программируемую пользователем вентильную матрицу (field-programmable gate array - FPGA), представляет собой специализированную интегральную схему (application specific integrated circuit - ASIC) и др.
[0021] Память 255 включает в себя, например, область хранения программ и область хранения данных. Область хранения программ и область хранения данных могут включать в себя комбинации разных типов запоминающих устройств, таких как постоянное запоминающее устройство (read-only memory - ROM), запоминающее устройство с произвольной выборкой (random access memory - RAM) (например, динамическое RAM [dynamic RAM - DRAM], синхронное DRAM [synchronous DRAM - SDRAM] и др.), электрически-стираемое программируемое постоянное запоминающее устройство (electrically erasable programmable read-only memory - EEPROM), флэш-память, жесткий диск, карта памяти SD и другие пригодные магнитные, оптические, физические или электронные запоминающие устройства или структуры данных. Устройство 250 обработки данных соединено с памятью 255 и исполняет программные инструкции, которые могут храниться в RAM памяти 255 (например, во время исполнения), ROM памяти 255 (например, на преимущественно постоянной основе) или другом непромежуточном машиночитаемом носителе, таком как другая память или диск. Программное обеспечение и инструкции, включенные в реализацию конвейера 100, могут храниться в памяти 255 контроллера 200. Программное обеспечение включает в себя, например, встроенное программное обеспечение, одно или более приложений, данные программ, фильтры, правила, один или более программных блоков и другие исполняемые инструкции. Контроллер 200 приспособлен для извлечения из памяти и исполнения, помимо прочего, инструкций, связанных с процессами и способами управления, описанными в данном документе. В других исполнениях, контроллер 200 включает в себя дополнительные, меньше по количеству или другие элементы.
[0022] Блок 230 параметров приводного механизма или электродвигателя соединен с или связан с электродвигателями и приводами 240, 245, которые связаны с первой звездочкой и/или второй звездочкой. Блок 230 параметров приспособлен для приема сигналов, связанных с одним или более параметрами (например, током, напряжением, коэффициентом мощности, крутящим моментом, скоростью, входной мощностью, выходной мощностью и др.) двигателей 240, 245. В некоторых вариантах осуществления блок 230 параметров принимает сигналы, связанные с параметрами электродвигателей. В других вариантах осуществления блок 230 параметров включает в себя или соединен с упомянутым одним или более датчиками 220 для регистрации параметров электродвигателей.
[0023] Управление электродвигателями 240, 245 осуществляется посредством сигналов управления, принимаемых из контроллера 200. Электродвигатели 240, 245 также соединены с редукторами с зубчатой передачей или трансмиссиями для уменьшения скорости вращения двигателей до скорости вращения, пригодной для звездочек и конвейера 100. В некоторых вариантах осуществления контроллер 200 приспособлен для управления электродвигателями 240, 245 и конвейером 100 автономно с использованием датчиков 220 и одной или более хранимых программ или блоков. В других вариантах осуществления, контроллер 200 приспособлен для управления электродвигателями и конвейером 100 на основе комбинации ручных вводов данных и средств автоматического управления. Упомянутые один или более гидравлических цилиндров 225 также принимают сигналы управления из контроллера 200 и селективно выдвигают или отводят раму 120 возвратного конца (например, изменяют положение первой звездочки, второй звездочки и др.) на основе сигналов управления из контроллера 200. Контроллер 200 также осуществляет контроль за электродвигателями и одним или более гидравлическими цилиндрами 225 для определения соответствующих характеристик. Например, контроллер 200 может осуществлять контроль или регистрировать электрические характеристики упомянутого одного или более электродвигателей, положение упомянутого одного или более гидравлических цилиндров 225 (например, выдвижение одного или более гидравлических цилиндров) и др. Хотя на чертеже показан один контроллер 200, в других исполнениях контроллер 200 может быть разделен на множество контроллеров. Например, контроллер 200 может быть разделен на объединенный блок управления (consolidated control unit - CCU), программируемый блок управления (programmable control unit - PCU) и др. CCU может быть размещен в взрывозащищенной оболочке и обеспечивает контроль над конвейерной системой. PCU представляет собой по сути надежную систему, которая выполнена с возможностью взаимодействия с CCU для, помимо прочего, остановки, замедления, выключения и др. работы конвейера 100.
[0024] Блок 205 интерфейса пользователя используется для управления или осуществления контроля за конвейером 100 или системой разработки месторождения. Например, блок 205 интерфейса пользователя функционально связан с контроллером 200 так, чтобы управлять скоростью конвейера, скоростью упомянутого одного или более электродвигателей и др. Блок 205 интерфейса пользователя может включать в себя комбинацию цифровых и аналоговых входных и выходных устройств, требующихся для достижения необходимого уровня управления и контроля для конвейера 100. Например, блок 205 интерфейса пользователя может включать в себя дисплей и входные устройства, такие как сенсорный дисплей, одну или более ручек управления, круговые шкалы, переключатели, кнопки и др. Упомянутый дисплей представляет собой, например, жидкокристаллический дисплей (liquid crystal display - LCD), светодиодный (light-emitting diode - LED) дисплей, органический LED(OLED) дисплей, электролюминесцентный дисплей (electroluminescent display - ELD), плоский дисплей с люминофором на основе эффекта эмиссии электронов с поверхностной проводимостью (surface-conduction electron-emitter display - SED), плоский дисплей на основе эффекта полевой эмиссии электронов и люминофора (field emission display - FED), жидкокристаллический дисплей на тонкопленочных транзисторах (thin-film transistor LCD - TFTLCD) и др. В других исполнениях дисплей представляет собой суперактивный матричный OLED (active-matrix OLED - AMOLED) дисплей. Блок 205 интерфейса пользователя может быть также приспособлен для отображения условий и данных, связанных с конвейером 100, в реальном времени или по существу в реальном времени. Например, блок 205 интерфейса пользователя приспособлен для отображения измеряемых электрических характеристик конвейера 100, состояния конвейера 100, натяжения цепи, неисправных состояний (например, ослабленной цепи, цепи с нулевым натяжением и др.), количества добытого материала на конвейере и др. В некоторых вариантах осуществления, управление блоком 205 интерфейса пользователя осуществляется в сочетании с упомянутым одним или более индикаторами 210 (например, LED) для обеспечения визуальной индикации состояния или условий конвейера 100.
[0025] Фиг.3 показывает примерное устройство 300, ограничивающее крутящий момент, которое включает в себя наружную муфту 305 и внутренний вал 310. Наружная муфта 305 и внутренний вал 310 выполнены с возможностью вращения относительно друг друга, когда достигнут предел крутящего момента устройства 300, ограничивающего крутящий момент. Фиг.4 показывает другое устройство, ограничивающее крутящий момент, в разрезе. Как показано на фиг.4, устройство 400, ограничивающее крутящий момент, включает в себя наружную муфту 405 и внутренний вал 410. По аналогии с устройством 300, ограничивающим крутящий момент, наружная муфта 405 и внутренний вал 410 устройства 400, ограничивающего крутящий момент, выполнены с возможностью вращения относительно друг друга, когда достигнут предел крутящего момента устройства 400, ограничивающего крутящий момент. В некоторых вариантах осуществления, устройства, ограничивающие крутящий момент, используемые с конвейером 100, аналогичны устройствам, ограничивающим крутящий момент, продаваемым компанией Voith Turbo Inc., Йорк, Пенсильвания, США.
[0026] Фиг.5 показывает систему 500 обнаружения проскальзывания, которая включает в себя обобщенное устройство 505, ограничивающее крутящий момент. Устройство 505, ограничивающее крутящий момент, включает в себя наружную муфту или первую часть 510 и внутренний вал или вторую часть 515. Наружная муфта 510 и внутренний вал 515 выполнены с возможностью вращения относительно друг друга, когда достигнут предел крутящего момента устройства 505, ограничивающего крутящий момент. Система 500 обнаружения проскальзывания также включает в себя первый датчик 520А, второй датчик 520В, первый объект 525А и второй объект 525В. Первый датчик 520А и второй датчик 520В представляют собой, например, бесконтактные датчики, которые регистрируют наличие первого объекта 525А и второго объекта 525В, соответственно. Датчики 520А и 520В генерируют выходные сигналы, которые передаются в контроллер 200. Используя выходные сигналы от датчиков 520А и 520В, контроллер 200 вычисляет или определяет угловое смещение наружной муфты 510 и угловое смещение внутреннего вала 515. Контроллер вычисляет или определяет величину проскальзывания между наружной муфтой 510 и внутренним валом 515 на основе периода времени между датчиками 520А и 520В, обнаруживающими объекты 525А и 525В. В некоторых вариантах осуществления, датчики 520А и 520В выдают сигналы в контроллер 200, когда объект обнаружен. В других вариантах осуществления, датчики 520А и 520В выдают сигналы в контроллер 200 непрерывно или по существу непрерывно во время работы конвейера 100, и контроллер 200 осуществляет оценку упомянутых сигналов, чтобы определять когда объект обнаружен. Система 500, показанная на фиг.5, включает в себя один датчик и объект для наружной муфты 510 и один датчик и объект для внутреннего вала 515. В других вариантах осуществления, система 500 может включать в себя дополнительные датчики и/или дополнительные объекты. Например, фиг.6 показывает систему 500, включающую в себя третий датчик 52°C и четвертый датчик 520D, а также третий объект 525С и четвертый объект 525D. Контроллер 200 принимает сигналы из каждого из датчиков и способен определять угловое смещение наружной муфты 510 или внутреннего вала 515 на основе каждого датчика отдельно или на основе комбинации датчиков.
[0027] На фиг.7 показан процесс 600 определения или обнаружения наличия проскальзывания в устройстве, ограничивающем крутящий момент, и соответственно осуществления управления на основе обнаруженного проскальзывания. Различные этапы, описанные в данном документе относительно процесса 600, могут выполняться одновременно, параллельно или в другом порядке, отличающемся от показанной последовательности выполнения. Процесс 600 может осуществляться с использованием меньшего количества этапов, чем в показанном варианте осуществления.
[0028] Процесс 600 начинается с регистрации положения первого объекта 525А (этап 605). Например, датчик 520А размещен на неподвижной части конвейера 100. Объект 525А размещен на наружной муфте 510 устройства 505, ограничивающего крутящий момент. Когда наружная муфта 510 вращается, датчик 520А регистрирует наличие объекта 525А, когда объект 525А, проходит мимо датчика 520А. Когда датчик 520А регистрирует наличие объекта 525А второй раз, контроллер 200 может определить, что наружная муфта 510 совершила полный оборот (т.е. повернулась на 360°). Аналогично, на этапе 610 осуществляется регистрация положения второго объекта 525В. После того как положение каждого из первого объекта 525А и второго объекта 525В зарегистрировано, контроллер 200 определяет скорость на входе, связанную с конвейером 100. Скорость на входе конвейера 100 может быть использована для определения наличия проскальзывания в устройстве 505, ограничивающем крутящий момент. Скорость на входе конвейера 100 может быть также использована для того чтобы определять, работает ли конвейер и с какой скоростью предположительно должна вращаться входная сторона устройства 505, ограничивающего крутящий момент.
[0029] На этапе 620, определяют или вычисляют первое угловое смещение, связанное с наружной муфтой 510. Упомянутое первое угловое смещение вычисляют или определяют на основе того, сколько раз первый датчик 520А регистрирует объект 525А, проходящий мимо первого датчика 520А, и периода времени между моментами, когда объект регистрируется первым датчиком. Упомянутое первое угловое смещение может быть измерено, например, относительно фиксированного положения наружной муфты 510, такого как положение объекта 525А, положение верхней мертвой точки (top dead center - TDC) наружной муфты 510, пусковое положение наружной муфты 510 и др. Первое угловое смещение может быть выражено в градусах, радианах, метрах (например, длина дуги) и др. На этапе 625, определяют или вычисляют второе угловое смещение, связанное с внутренним валом 515. Упомянутое второе угловое смещение вычисляют или определяют на основе того, сколько раз второе датчик 520В регистрирует объект 525В, проходящий мимо второго датчика 520В, и периода времени между моментами, когда объект регистрируется вторым датчиком 520В. Второе угловое смещение может быть измерено, например, относительно фиксированного положения внутреннего вала 515, такого как положение объекта 525В, положение TDC внутреннего вала 515, исходное положение внутреннего вала 515 и др. Второе угловое смещение может быть выражено в градусах, радианах, метрах (например, длина дуги) и др.
[0030] После определения первого углового смещения и второго углового смещения контроллер 200 определяет или вычисляет величину проскальзывания между наружной муфтой 510 и внутренним валом 515 (этап 630). Величина проскальзывания может быть выражена в градусах, радианах, метрах (например, длина дуги) и др. Величину проскальзывания сравнивают с пороговой величиной (например, нулем) (этап 635), чтобы определить, является ли проскальзывание, которое было определено или вычислено, показателем состояния превышения момента. Если на этапе 635 установлено, что проскальзывание, которое было определено или вычислено, меньше чем пороговое, то способ 600 возвращается к этапу 605. Если же на этапе 635 установлено, что величина проскальзывания, которая было определена или вычислена, больше порога, то контроллер 200 будет осуществлять или выполнять операцию управления на основе упомянутого проскальзывания (этап 640). В некоторых вариантах осуществления, упомянутая операция управления представляет собой выключение конвейера 100. Выключение конвейере 100 может включать в себя, например, удаление электропитания из приводного электродвигателя или привода, уменьшение скорости приводного электродвигателя или привода, уменьшение усилия от приводного электродвигателя или привода и др. В других вариантах осуществления, операция управления включает в себя генерирование сигнала для выдачи пользователю или оператору индикации наличия или величины проскальзывания. Например, контроллер 200 выполнен с возможностью или приспособлен для генерирования сигнала возбуждения для визуального индикатора (например, LED, LCD и др.), сигнала возбуждения для звукового индикатора (например, громкоговорителя и др.), сигнала возбуждения для тактильного индикатора (например, электродвигателя) и др. Индикация наличия проскальзывания уведомляет пользователя или оператора о том, что произведено или должно быть произведено корректирующее действие (например, выключен конвейер и др.).
[0031] Таким образом, настоящее изобретение в целом обеспечивает, помимо прочего, системы, способы, устройства и непромежуточные машиночитаемые носители для определения или обнаружения наличия проскальзывания в устройстве, ограничивающем крутящий момент, и соответственно выполнения операции управления на основе обнаруженного проскальзывания. Различные признаки и преимущества изобретения выложены в приведенной ниже формуле изобретения.
Контроллер выполнен с возможностью приема первого сигнала из первого датчика, определения первой величины для положения первой части устройства, ограничивающего крутящий момент, на основе упомянутого первого сигнала, приема второго сигнала из второго датчика, определения второй величины для положения второй части устройства, ограничивающего крутящий момент, на основе упомянутого второго сигнала, определения разности между упомянутой первой величиной для положения упомянутой первой части и упомянутой второй величиной для положения упомянутой второй части, определения величины проскальзывания между упомянутой первой частью и упомянутой второй частью на основе упомянутой разности и генерирования сигнала управления для управления работой конвейера на основе упомянутой величины проскальзывания. Упомянутое устройство, ограничивающее крутящий момент, предотвращает приложение избыточного крутящего момента к звездочке или цепи. 3 н. и 17 з.п. ф-лы, 7 ил.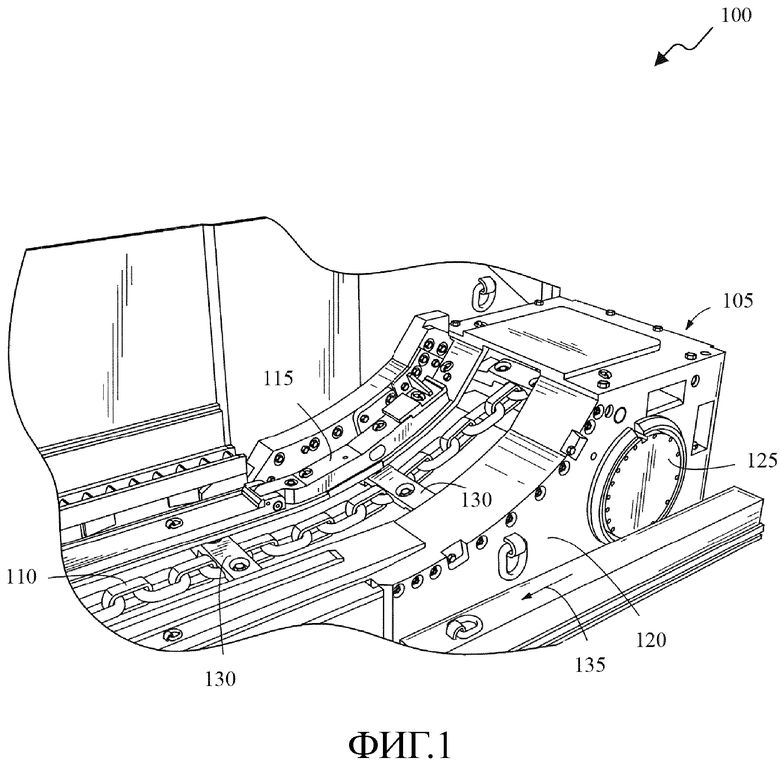
1. Конвейер для системы горных работ, причем упомянутый конвейер содержит:
звездочку;
устройство, ограничивающее крутящий момент, включающее в себя первую часть и вторую часть, причем первая часть и вторая часть выполнены с возможностью вращения относительно друг друга, когда превышен предел крутящего момента устройства, ограничивающего крутящий момент;
приводной механизм, соединенный через устройство, ограничивающее крутящий момент, со звездочкой, причем приводной механизм выполнен с возможностью приведения в движение звездочки;
первый датчик, выполненный с возможностью генерирования первого сигнала, связанного с положением первой части устройства, ограничивающего крутящий момент;
второй датчик, выполненный с возможностью генерирования второго сигнала, связанного с положением второй части устройства, ограничивающего крутящий момент;
контроллер, включающий в себя процессор и память, причем контроллер выполнен с возможностью
приема первого сигнала из первого датчика,
определения первой величины для положения первой части устройства, ограничивающего крутящий момент, на основе первого сигнала,
приема второго сигнала из второго датчика,
определения второй величины для положения второй части устройства, ограничивающего крутящий момент, на основе второго сигнала,
определения разности между первой величиной для положения первой части устройства, ограничивающего крутящий момент, и второй величиной для положения второй части устройства, ограничивающего крутящий момент,
определения величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, на основе разности и
генерирования сигнала управления для управления работой конвейера на основе величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
2. Конвейер по п.1, в котором первый датчик и второй датчик представляют собой бесконтактные датчики.
3. Конвейер по п.1, в котором положение первой части устройства, ограничивающего крутящий момент, представляет собой угловое смещение первой части устройства, ограничивающего крутящий момент, и положение второй части устройства, ограничивающего крутящий момент, представляет собой угловое смещение второй части устройства, ограничивающего крутящий момент.
4. Конвейер по п.1, в котором контроллер выполнен также с возможностью сравнения величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
5. Конвейер по п.4, в котором генерирование сигнала управления осуществляется тогда, когда величина проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, больше пороговой величины.
6. Конвейер по п.1, в котором сигнал управления выполнен с возможностью удаления электропитания из приводного механизма.
7. Конвейер по п.1, в котором сигнал управления генерирует визуальную индикацию величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
8. Конвейер по п.1, дополнительно содержащий первый объект, расположенный на первой части устройства, ограничивающего крутящий момент, и связанный с первым датчиком, и второй объект, расположенный на второй части устройства, ограничивающего крутящий момент, и связанный со вторым датчиком.
9. Конвейер по п.1, в котором конвейер представляет собой скребковый забойный конвейер.
10. Способ управления конвейером для горных работ, причем способ включает:
прием первого сигнала из первого датчика, связанного с положением первой части устройства, ограничивающего крутящий момент;
определение первой величины для положения первой части устройства, ограничивающего крутящий момент, на основе первого сигнала;
прием второго сигнала из второго датчика, связанного с положением второй части устройства, ограничивающего крутящий момент;
определение второй величины для положения второй части устройства, ограничивающего крутящий момент, на основе второго сигнала;
определение разности между первой величиной для положения первой части устройства, ограничивающего крутящий момент, и второй величиной для положения второй части устройства, ограничивающего крутящий момент;
определение величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент; и
генерирование сигнала управления для управления работой конвейера на основе величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
11. Способ по п.10, в котором первый датчик и второй датчик представляют собой бесконтактные датчики.
12. Способ по п.10, в котором положение первой части устройства, ограничивающего крутящий момент, представляет собой угловое смещение первой части устройства, ограничивающего крутящий момент, и положение второй части устройства, ограничивающего крутящий момент, представляет собой угловое смещение второй части устройства, ограничивающего крутящий момент.
13. Способ по п.10, дополнительно включающий сравнение величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, с пороговой величиной.
14. Способ по п.13, в котором генерирование сигнала управления осуществляется тогда, когда величина проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, больше пороговой величины.
15. Способ по п.10, в котором сигнал управления выполнен с возможностью удаления электропитания из приводного механизма.
16. Способ по п.10, в котором сигнал управления генерирует визуальную индикацию величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
17. Способ по п.10, в котором конвейер представляет собой скребковый забойный конвейер.
18. Способ управления конвейером для системы горных работ, причем способ включает:
определение первой величины для положения первой части устройства, ограничивающего крутящий момент, на основе сигнала первого датчика;
определение второй величины для положения второй части устройства, ограничивающего крутящий момент, на основе сигнала второго датчика;
определение величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, на основе разности между первой величиной для положения первой части устройства, ограничивающего крутящий момент, и второй величиной для положения второй части устройства, ограничивающего крутящий момент; и
генерирование сигнала управления для управления работой конвейера на основе величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент.
19. Способ по п.18, дополнительно включающий сравнение величины проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, с пороговой величиной.
20. Способ по п.19, в котором генерирование сигнала управления осуществляется тогда, когда величина проскальзывания между первой частью устройства, ограничивающего крутящий момент, и второй частью устройства, ограничивающего крутящий момент, больше пороговой величины.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| DE 202010012659 U1, 09.12.2010 | |||
| DE 102013003954 B4, 25.09.2014 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |

