Изобретение относится к области радиотехники, а именно к пассивным системам радиоконтроля, и может быть использовано в системах контроля собственного местоположения объекта навигации в качестве альтернативного способа определения координат, в частности, в условиях нарушения работы или выходе из строя приемника сигналов глобальных навигационных спутниковых систем (ГЛОНАСС, GPS и др.).
Известны разностно-дальномерный способ и устройство определения местоположения мобильных объектов (аналог) [1].
Способ, заключающийся в поочередном излучении сетью опорных навигационных пунктов, расположенных в точках пространства с известными координатами, когерентных гармонических сигналов, их приеме на мобильном объекте, принятых от каждого опорного объекта и вычислении по ним координат мобильного объекта.
Недостатком способа и устройства является необходимость использования высокоточной шкалы единого времени на объекте навигации, точная синхронизация сигналов радиоизлучающих объектов, а также сложность реализации при больших расстояниях между опорными радионавигационными точками и объектом навигации.
Известен также способ определения собственного местоположения судна на основе сигналов автоматической идентификационной системы и устройство для его осуществления (аналог) [2].
Способ заключается в определении азимутальных углов прихода сигналов от трех или более независимых радиоизлучающих объектов с известными координатами, в качестве которых могут быть использованы суда, буи или береговые станции, определение географических координат радиоизлучающих объектов путем декодирования и анализа информации, содержащийся в сигналах, принимаемых от них, и последующее вычисление собственного местоположения объекта на основе определенных координат радиоизлучающих объектов и азимутальных углов между ними применяемым в геодезии методом однократной или многократной обратной засечки.
Недостатком способа является получение только географических координат объекта навигации: широты и долготы. Использование антенной системы с разносом антенных элементов не менее λ/2 друг от друга, где λ - максимальная длина волны сигналов в диапазоне работы устройства, приводит к существенным ошибкам определения собственного местоположения объекта навигации, обусловленным неоднозначной оценкой разности фаз между приемными каналами пеленгатора.
Наиболее близким по технической сущности и достигаемому техническому результату является способ определения собственного местоположения объекта в пространстве и устройство, его реализующее (прототип) [3].
Способ заключается в приеме сигналов от независимых радиоизлучающих объектов с известными координатами с использованием антенной системы, установленной на объекте навигации, измерении параметров сигналов от радиоизлучающих объектов с известными координатами в азимутальной и угломестной плоскостях, определении параметров векторов направлений на радиоизлучающие объекты с известными координатами в азимутальной и угломестной плоскостях, определении собственного местоположения объекта навигации на основе измеренных параметров сигналов от радиоизлучающих объектов с известными координатами.
Недостатком ближайшего аналога (прототипа) является относительно невысокая точность определения собственных координат объекта навигации, так как при измерении параметров радиосигнала не учитываются его поляризационные параметры, а также возникает необходимость использования антенных систем с разнесенными в пространстве элементами, что в большинстве случаев невозможно ввиду ограниченных габаритов самого объекта навигации.
Целью изобретения является расширение координатного пространства области применения навигационной системы при повышении точности определения собственного местоположения объекта навигации за счет обеспечения согласования по поляризации между приемной антенной системой и полем приходящей электромагнитной волны от радиоизлучающего объекта с известными координатами.
Дополнительно, определение ориентации вектора напряженности электрического поля в пространстве, позволяет исключить операции сканирования по пространственным и поляризационным параметрам, что позволит сократить временные затраты при измерении параметров сигналов от радиоизлучающих объектов с известными координатами в азимутальной и угломестной плоскостях.
Поставленная цель достигается тем, что в известном способе, заключающемся в приеме сигналов от независимых радиоизлучающих объектов с известными координатами с использованием антенной системы, установленной на объекте навигации, измерении параметров сигналов от радиоизлучающих объектов с известными координатами в азимутальной и угломестной плоскостях, определении собственного местоположения объекта навигации на основе измеренных параметров сигналов от радиоизлучающих объектов с известными координатами, согласно изобретению, в качестве антенной системы используют триортогональную вибраторную антенную систему (ТОВАС), измерения и расчеты выполняют в топоцентрической декартовой системе координат (ДСК) OXYZ и ДСК связанной с объектом навигации OОНXОНYОНZОН, выбирают N≥2 независимых радиоизлучающих объектов с известными координатами и эллиптически поляризованными радиоизлучениями, измеряют углы ориентации ТОВАС, измеряют в момент времени t1 с помощью ТОВАС ортогональные компоненты Ex,n(t1), Ey,n(t1), Ez,n(t1), где n=1…N, векторов напряженности электрического поля En(t1) принятых сигналов от независимых радиоизлучающих объектов с известными координатами, измеряют в моменты времени t2 с помощью ТОВАС ортогональные компоненты Ex,n(t2), Ey,n(t2), и Ez,n(t2) векторов напряженности электрического поля En(t2) принятых сигналов от независимых радиоизлучающих объектов с известными координатами, с учетом измеренных углов ориентации ТОВАС ξα, ξβ, ξγ, ортогональных компонент Ex,n(t1), Ey,n(t1), Ez,n(t1) и Ex,n(t2), Ey,n(t2), Ez,n(t2) определяют ориентацию векторов напряженности электрического поля En т(t1) и En т(t2) в топоцентрической ДСК OXYZ, строят 2N вспомогательных плоскостей Ωn(t1) и Ωn(t2) так, что бы они были перпендикулярны векторам En т(t1) и En т(t2) и проходили через соответствующие радиоизлучающие объекты с известными координатами, на пересечениях плоскостей Ωn(t1) и Ωn(t2) строят N линий местоположения объекта  , которые проходят через n-й радиоизлучающий объект с известными координатами, определяют собственное местоположение объекта навигации как точку пересечения линий собственного местоположения объекта
, которые проходят через n-й радиоизлучающий объект с известными координатами, определяют собственное местоположение объекта навигации как точку пересечения линий собственного местоположения объекта  . Выбирают интервалы между моментами времени t1 и t2 равным четверти периода электромагнитной волны измеряемого радиосигнала.
. Выбирают интервалы между моментами времени t1 и t2 равным четверти периода электромагнитной волны измеряемого радиосигнала.
Благодаря указанной новой совокупности существенных признаков при реализации заявленного способа обеспечивается согласование по поляризации между приемной ТОВАС и полем приходящей электромагнитной волны радиоизлучающего объекта с известными координатами, что исключает возникновение дополнительных ошибок в определении линий собственного местоположения объекта навигации, следовательно, указывает на возможность повышения точности определения собственных координат объекта навигации.
Заявленное изобретение поясняется чертежами, на которых показаны:
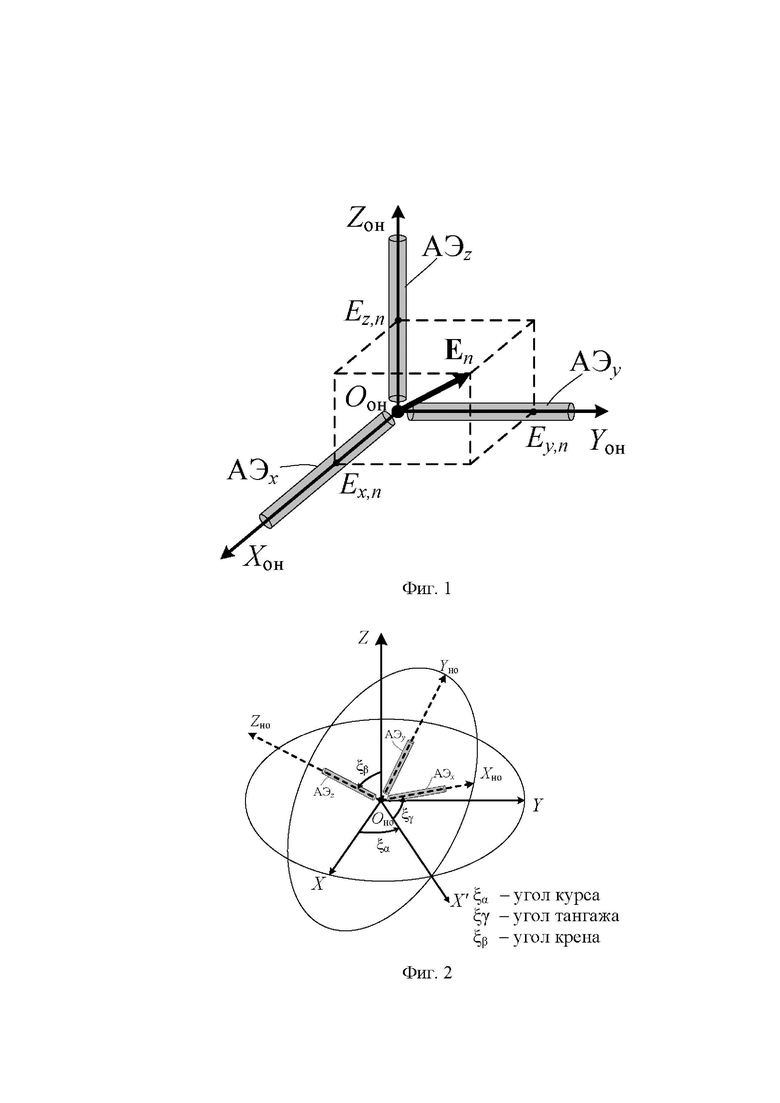
на фиг. 1 ориентация вектора напряженности электрического поля в трехмерном пространстве относительно ТОВАС;
на фиг. 2 углы ориентации ТОВАС в трехмерном пространстве;
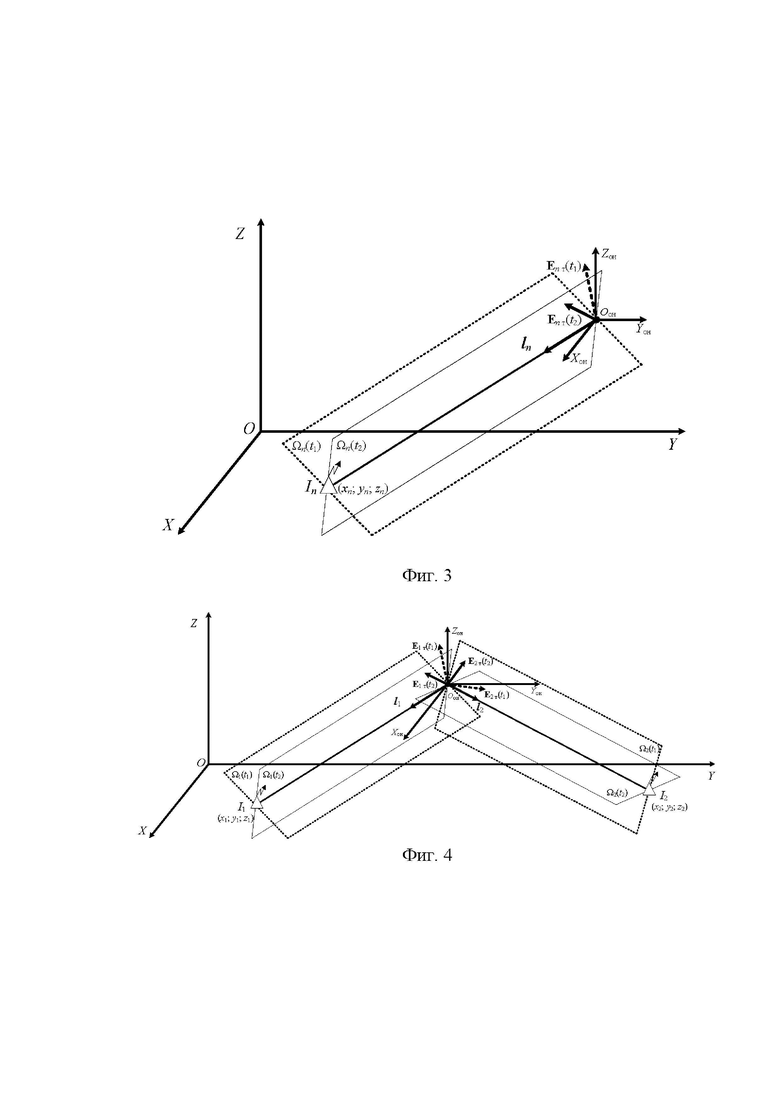
на фиг. 3 графическое представление определения линий местоположения объекта навигации;
на фиг. 4 графическое представление способа определения собственного местоположения объекта в пространстве.
Традиционные угломерные способы и методы определения координат объекта основаны на ортогональности фронта фаз к направлению на источники радиоизлучения (ИРИ). Используя фазовый пеленгатор с антенной системой, имеющей жесткую привязку к осям объекта навигации, измеряют углы прихода радиосигналов радиоизлучающих объектов в азимутальной и угломестной плоскостях в связанной локальной системе координат объекта навигации [4-7].
Основой данных способов пеленгования радиосигналов принято считать различие времени прихода радиоволны в разнесенные точки пространства. При этом точность пеленгования радиосигналов неизвестной поляризации классическими способами, ориентированными на обработку электромагнитного поля определенной поляризации, дает значительные погрешности пеленгования, если поляризационные характеристики пеленгаторной антенной системы не согласованы с поляризацией падающих волн. Повышение точности пеленгования в большинстве случаев достигается увеличением базы пеленгаторной антенной системы, то есть разнесением в пространстве антенных элементов пеленгаторной антенной системы [7].
Также существует другой класс методов определения координат объекта, основанный на ортогональности векторов напряженности электрического и магнитного поля [8-12], который в настоящее время недостаточно изучен. Изучение и применение методов этого класса становится особо актуальным при использовании малогабаритных летательных аппаратов в качестве платформы для развертывания средств пеленгования ИРИ [11].
Информация о пространственном положении ИРИ содержится в значениях тех или иных параметров радиосигналов, поступающих на вход антенной системы объекта навигации: амплитуда, частота, фаза, время запаздывания и поляризационные параметры радиоволны.
Учет поляризационных параметров радиоволны возможен за счет измерения пространственного положения вектора напряженности электрического поля. Для определения ориентации вектора напряженности электрического поля Е в пространстве необходимо определить три его ортогональные составляющие в системе координат объекта навигации [10].
Пространственная ориентация вектора напряженности электрического поля на объекте навигации Е определяется с помощью сосредоточенной ТОВАС, состоящей из трех антенных элементов (АЭ) АЭx, АЭy, АЭz [6, 7].
Измерения и расчеты выполняют в топоцентрической декартовой системе координат (ДСК) OXYZ и ДСК связанной с объектом навигации OОНXОНYОНZОН в которой центр координат OОН совмещен с центром ТОВАС, оси OОНXОН, OОНYОН и OОНZОН направлены по ортогональным АЭx, АЭy, АЭz соответственно (фиг. 1).
Выбирают N≥2 независимых радиоизлучающих объектов с известными координатами (xn; yn; zn), где n=1…N - номер радиоизлучающего объекта.
Измеряют углы ориентации ТОВАС относительно топоцентрической ДСК. Существуют различные методы определения ориентации твердого тела в трехмерном пространстве, каждый из которых имеет свои достоинства и недостатки. Наиболее распространенным методом определения ориентации твердого тела в трехмерном пространстве является метод углов Эйлера, согласно которому твердое тело может быть переведено из начального положения в любое конечное положение с помощью трех последовательных поворотов вокруг осей OZ, OY, ОХ на соответствующие углы курса (ξα), крена (ξβ) и тангажа (ξγ) (фиг. 2).
Измеряют параметры сигналов от радиоизлучающих объектов с известными координатами в связанной с объектом навигации ДСК, для чего в моменты времени t1 и t2 измеряют значения ортогональных компоненты Ex,n, Ey,n, и Ez,n не менее двух векторов напряженности электрического поля En в общем случае эллиптически поляризованного аналогового радиосигнала на АЭx, АЭy и АЭz ТОВАС соответственно (фиг. 1).
С учетом измеренных углов ориентации ТОВАС ξα, ξβ, ξγ, ортогональных компонент Ex,n(t1), Ey,n(t1), Ez,n(t1) и Ex,n(t2), Ey,n(t2), Ez,n(t2) определяют ориентацию векторов напряженности электрического поля En т(t1) и En т(t2) в топоцентрической ДСК OXYZ. Для этого путем векторного сложения ортогональных компонент Ex,n, Ey,n, и Ez,n определяют ориентацию векторов напряженности электрического поля En в пространстве и запоминают их.
Вектор напряженности электрического поля преобразуют в топоцентрическую систему координат за счет последовательного перемножения измеренного вектора En на три матрицы поворота A3(ξα), A2(ξβ), A3(ξγ), соответствующие углам Эйлера ξα, ξβ, ξγ [12]:
En т=А3(ξα)А2(ξβ)А3(ξγ)En,
где 
Вспомогательную плоскость Ωn, проходящую через точку с координатами радиоизлучающих объектов (xn; yn; zn) и перпендикулярную вектору напряженности электрического поля, который определяется тремя ортогональными составляющими Ex,n т, Ey,n т, и Ez,n т можно описать уравнением:

Строят 2N вспомогательных плоскостей Ωn(t1) и Ωn(t2) так, чтобы они были перпендикулярны векторам En т(t1) и En т(t2) и проходили через соответствующие радиоизлучающие объекты с известными координатами.
Линия собственного местоположения объекта  , определяется пересечением плоскостей Ωn(t1) и Ωn(t2) и находится при решении системы линейных уравнений (фиг. 3):
, определяется пересечением плоскостей Ωn(t1) и Ωn(t2) и находится при решении системы линейных уравнений (фиг. 3):

На фиг. 3 отображено графическое представление определения линий местоположения объекта навигации  , как линии пересечения вспомогательных плоскостей Ωn(t1) и Ωn(t2), проходящих через точку с координатами радиоизлучающих объектов In(xn; yn; zn) и перпендикулярных соответствующим векторам напряженности электрического поля En т(t1) и En т(t2), измеренных в моменты времени t1 и t2 соответственно. Ориентацией и перемещением в пространстве объекта навигации за указанный временной интервал можно пренебречь.
, как линии пересечения вспомогательных плоскостей Ωn(t1) и Ωn(t2), проходящих через точку с координатами радиоизлучающих объектов In(xn; yn; zn) и перпендикулярных соответствующим векторам напряженности электрического поля En т(t1) и En т(t2), измеренных в моменты времени t1 и t2 соответственно. Ориентацией и перемещением в пространстве объекта навигации за указанный временной интервал можно пренебречь.
Строят N линий собственного местоположения объекта  , на пересечениях плоскостей Ωn(t1) и Ωn(t2), проходящих каждая через n-й радиоизлучающий объект с известными координатами, определяют собственное местоположение объекта навигации как точку пересечения линий собственного местоположения объекта
, на пересечениях плоскостей Ωn(t1) и Ωn(t2), проходящих каждая через n-й радиоизлучающий объект с известными координатами, определяют собственное местоположение объекта навигации как точку пересечения линий собственного местоположения объекта  (фиг. 4).
(фиг. 4).
Учитывая, что в прямоугольной системе координат направляющий вектор не отделим от прямой линии [12], при определении параметров линии собственного местоположения объекта достаточно определить параметры направляющего вектора. На основе теории электромагнитного поля Д.К. Максвелла для нахождения параметров направляющего вектора  необходимо найти векторное произведение векторов En т(t1) и En т(t2):
необходимо найти векторное произведение векторов En т(t1) и En т(t2):

Линия местоположения объекта навигации может быть описана параметрическим уравнением прямой в пространстве, зная координаты радиоизлучающих объектов и направляющие вектора данных прямых:

где sn - некоторый параметр n-ой линии местоположения объекта навигации, который может принимать любые действительные значения.
Собственное местоположение объекта навигации определяются как точка пересечения линий местоположения объекта  , для чего приравниваем соответствующие уравнения линий местоположения объекта и проводим упрощения:
, для чего приравниваем соответствующие уравнения линий местоположения объекта и проводим упрощения:
Решаем полученную систему трех линейных уравнений с двумя неизвестными, для чего выразим параметр s1, через s2 из первого уравнения системы (5):

Выразим параметр s2, для чего подставим во второе уравнение системы (5) полученное выражение для параметра s1:

Координаты собственного местоположения объекта навигации рассчитываются путем подстановки параметр s2 в параметрическое уравнение прямой в пространстве относительно второго радиоизлучающего объекта:
В интересах повышения точности определения собственного местоположения объекта в пространстве интервалы между моментами времени t1 и t2 выбирают равным четверти периода электромагнитной волны измеряемого радиосигнала.
Проверка возможности достижения сформулированного технического результата была проведена путем компьютерного моделирования.
Методика проверки точности определения координат собственного местоположения объекта навигации в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех.
Исходными данными является эллиптически поляризованное радиоизлучение на входе ТОВАС пеленгатора при различных параметрах сигнала и взаимном расположении объекте навигации и радиоизлучающих объектов с известными координатами. В ходе имитационного моделирования установлено, что выигрыш при использовании разработанного способа составляет 5…20% в зависимости от количества радиоизлучающих объектов с известными координатами, топологии их взаимного размещения относительно объекта навигации, поляризационных параметров сигналов радиоизлучающих объектов и отношения сигнал/шум на входе радиоприемного устройства объекта навигации.
Реализация заявленного способа преимущественно целесообразна при размещении ТОВАС на подвижном объекте, в частности на летательном аппарате, при этом отсутствует необходимость высокоточного определения углов ориентации летательного аппарата в пространстве.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы. - М: Радио и связь, 1994, с. 211-214.
2. Патент №2685705 (Россия). Способ определения собственного местоположения судна на основе сигналов автоматической идентификационной системы и устройство для его осуществления / С.В. Трусов, О.И. Барабошкин, A.M. Кузнецов, С.А. Бобровский. - 2019.
3. Патент №2779283 (Россия). Способ определения собственного местоположения объекта в пространстве и устройство его реализующее / В.В. Беляев, А.Ю. Бондарцов, Ю.А. Бондарцов, Г.С.Ковалев. - 2022.
4. Дворников С.В., Саяпин В.Н., Симонов А.Н. Теоретические основы координатометрии источников радиоизлучений. Учебное пособие. - СПб.: ВАС, 2007. - 80 с.
5. Липатников В.А., Соломатин А.И., Терентьев А.В. Радиопеленгация. Теория и практика. - СПб.: ВАС, 2006. - 358 с.
6. Волков Р.В., Дворников С.В., Саяпин В.Н., Симонов А.Н. Основы построения и функционирования разностно-дальномерных систем координатометрии источников радиоизлучений. - СПб.: ВАС, 2013. - 116 с.
7. Основы построения и функционирования угломерных систем координатометрии источников радиоизлучений: Учеб. пособие / Под ред. А.Н. Симонова. - СПб.: ВАС, 2017. - 248 с
8. Канарейкин Д.Б., Павлов Н.Ф., Потехин В.А. Поляризация радиолокационных сигналов. - М.: «Советское радио», 1966. - 440 с.
9. Комарович В.Ф., Никитченко В.В. Методы пространственной обработки радиосигналов. - Л.: ВАС, 1989. - 278 с.
10. Патент №2624449 (Россия). Способ поляризационного пеленгования радиосигналов С.В. Богдановский, Р.В. Волков, В.В. Севидов, А.Н. Симонов. - 2017.
11. Способ определения координат беспилотного летательного аппарата на основе поляризационной обработки радиоизлучений реперных станций / С.В. Богдановский, А.Н. Симонов, С.Ф. Теслевич, А.Б. Махетов // Наукоемкие технологии. - 2017. - Т. 18, №11. - С. 16-21.
12. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. - М.: Наука, 1973. - 832 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2023 |
|
RU2827103C1 |
| Способ определения угловой ориентации летательного аппарата | 2024 |
|
RU2821640C1 |
| Способ определения координат источника радиоизлучений с борта летательного аппарата с использованием триортогональной рамочной антенной системы | 2024 |
|
RU2824445C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741072C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2023 |
|
RU2822686C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2714502C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННОЙ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741068C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2709607C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ РАМОЧНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741074C1 |
Изобретение относится к области радиотехники, а именно к пассивным системам радиоконтроля, и может быть использовано в системах контроля собственного местоположения объекта навигации в качестве альтернативного способа определения координат, в частности в условиях нарушения работы или выхода из строя приемника сигналов глобальных навигационных спутниковых систем (ГЛОНАСС, GPS и др.). Техническим результатом является расширение области применения навигационной системы при повышении точности определения собственного местоположения объекта навигации за счет обеспечения согласования по поляризации между приемной антенной системой и полем приходящей электромагнитной волны от радиоизлучающих объектов с известными координатами. Заявленный способ основан на определении собственного местоположения объекта навигации в пространстве путем приема радиосигналов от N ≥ 2 независимых радиоизлучающих объектов с известными координатами с использованием триортогональной вибраторной антенной системой (ТОВАС), установленной на объекте навигации, измерении с ее помощью в моменты времени t1 и t2 троек ортогональных компонент Ex,n(t1), Ey,n(t1), Ez,n(t1) и Ex,n(t2), Ey,n(t2), Ez,n(t2), векторов напряженности электрического поля En(t1) и En(t2) принятых сигналов от независимых радиоизлучающих объектов с известными координатами, где n = 1…N – номер радиоизлучающего объекта, измерении углов ориентации ТОВАС в пространстве, определении ориентации векторов напряженности электрического поля En т(t1) и En т(t2) в топоцентрической декартовой системе координат (ДСК) OXYZ с учетом измеренных углов ориентации ТОВАС ξα, ξβ, ξγ, а также ортогональных компонент Ex,n(t1), Ey,n(t1), Ez,n(t1) и Ex,n(t2), Ey,n(t2), Ez,n(t2), формировании вспомогательной Ωn(t1) и Ωn(t2), так, что бы они были перпендикулярны векторам En т(t1) и En т(t2) и проходили через соответствующие радиоизлучающие объекты с известными координатами, определении линии местоположения объекта ln, на пересечениях этих плоскостей и вычислении координат собственного местоположения объекта навигации как точки пересечения линий местоположения объекта ln. 1 з.п. ф-лы, 4 ил.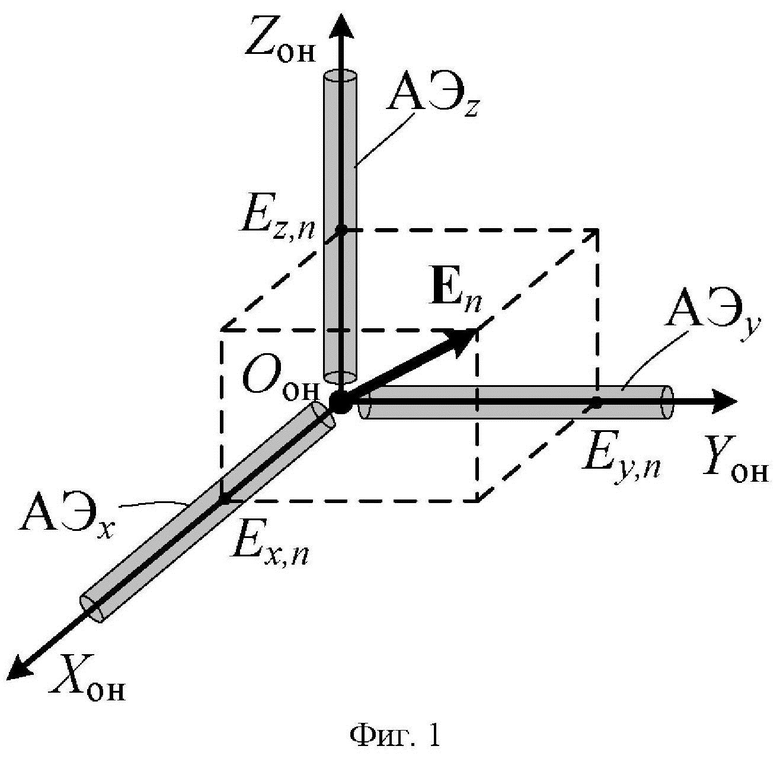
1. Способ определения собственного местоположения объекта в пространстве, заключающийся в том, что принимают сигналы от независимых радиоизлучающих объектов с известными координатами с использованием антенной системы, установленной на объекте навигации, измеряют параметры сигналов от радиоизлучающих объектов с известными координатами в азимутальной и угломестной плоскостях, определяют собственное местоположение объекта навигации на основе измеренных параметров сигналов от радиоизлучающих объектов с известными координатами, отличающийся тем, что в качестве антенной системы используют триортогональную вибраторную антенную систему (ТОВАС), измерения и расчеты выполняют в топоцентрической декартовой системе координат (ДСК) OXYZ и ДСК, связанной с объектом навигации OонXонYонZон, выбирают N ≥ 2 независимых радиоизлучающих объектов с известными координатами и эллиптически поляризованными радиоизлучениями, измеряют углы ориентации ТОВАС, измеряют в момент времени t1 с помощью ТОВАС ортогональные компоненты Ex,n(t1), Ey,n(t1), Ez,n(t1) векторов напряженности электрического поля En(t1) принятых сигналов от независимых радиоизлучающих объектов с известными координатами, где n = 1…N – номер радиоизлучающего объекта, измеряют в момент времени t2 с помощью ТОВАС ортогональные компоненты Ex,n(t2), Ey,n(t2), и Ez,n(t2) векторов напряженности электрического поля En(t2) принятых сигналов от независимых радиоизлучающих объектов с известными координатами, с учетом измеренных углов ориентации ТОВАС 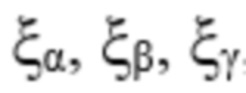 , ортогональных компонент Ex,n(t1), Ey,n(t1), Ez,n(t1) и Ex,n(t2), Ey,n(t2), Ez,n(t2) определяют ориентацию векторов напряженности электрического поля En т(t1) и En т(t2) в топоцентрической ДСК OXYZ, строят 2N вспомогательных плоскостей
, ортогональных компонент Ex,n(t1), Ey,n(t1), Ez,n(t1) и Ex,n(t2), Ey,n(t2), Ez,n(t2) определяют ориентацию векторов напряженности электрического поля En т(t1) и En т(t2) в топоцентрической ДСК OXYZ, строят 2N вспомогательных плоскостей  и
и  так, чтобы они были перпендикулярны векторам En т(t1) и En т(t2) и проходили через соответствующие радиоизлучающие объекты с известными координатами, на пересечениях плоскостей и строят N линий местоположения объекта ln, которые проходят через n-й радиоизлучающий объект с известными координатами, определяют собственное местоположение объекта навигации как точку пересечения линий местоположения объекта ln.
так, чтобы они были перпендикулярны векторам En т(t1) и En т(t2) и проходили через соответствующие радиоизлучающие объекты с известными координатами, на пересечениях плоскостей и строят N линий местоположения объекта ln, которые проходят через n-й радиоизлучающий объект с известными координатами, определяют собственное местоположение объекта навигации как точку пересечения линий местоположения объекта ln.
2. Способ по п.1, отличающийся тем, что интервалы между моментами времени t1 и t2 выбирают равным четверти периода электромагнитной волны измеряемого радиосигнала.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741072C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОБСТВЕННОГО МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2779283C1 |
| Способ определения собственного местоположения судна на основе сигналов автоматической идентификационной системы и устройство для его осуществления | 2018 |
|
RU2685705C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2709607C1 |
| Способ определения координат источников радиоизлучения | 2019 |
|
RU2718737C1 |
| CN 102981177 A, 20.03.2013 | |||
| CN 104050362 A, 17.09.2014. | |||

