Данное изобретение относится к самоподъемной системе для крана.
Понятие «самоподъем» означает относительно крана введение мачтовых элементов в башню крана, с целью приведения крана на желаемую высоту крюка. Для этого предусмотрено соединенное с возможностью сдвига с башенной конструкцией самоподъемное устройство, которое обычно окружает башню крана и имеет на одной из своих сторон отверстие, через которое можно вводить или удалять мачтовый элемент (мачтовой секцию).
В уровне техники самоподъемное устройство называется, среди прочего, самоподъемным колоколом, самоподъемным стулом, самоподъемной платформой или телескопической тележкой. Однако при этом понимается соединенная с башней крана, сдвигаемая конструкция, которая служит для введения, соответственно, удаления мачтовой секции из конструкции башни.
Самоподъем (набор высоты) крана происходит, как правило, при полностью смонтированной верхней части крана, которая содержит основную стрелу, противовесную стрелу, противовес, кабину крана и поворотный круг катания. Самоподъемное устройство расположено под верхней частью крана и соединено с ней так, что оно может поднимать верхнюю часть крана. Таким образом, можно вводить мачтовую секцию в конструкцию башни или удалять из конструкции башни, с целью приведения крана на желаемый уровень высоты.
При самоподъеме (наборе высоты) крана находящийся над самоподъемным устройством участок башенной конструкции поднимается с помощью подъемного приспособления, и мачтовый элемент (мачтовая секция) вводится в образовавшееся свободное пространство. При этом новый введенный мачтовый элемент закрепляется на конструкции башни работающими на конструкции башни монтерами. Самоподъем крана на основании требующих много персонала работ, которые необходимо выполнять в зоне подлежащего введению, соответственно, удалению матчевого элемента, является трудозатратным. Дополнительно к этому, во время выполнения процесса самоподъема имеется повышенная опасность несчастных случаев для выполняющего процесс самоподъема персонала.
Поэтому задачей данного изобретения является упрощение самоподъема крана и значительное уменьшение опасности несчатных случаев во время процесса самоподъема.
Это достигается с помощью самоподъемной системы для крана с признаками пункта 1 формулы изобретения.
Система содержит самоподъемное устройство для введения матчевого элемента в конструкцию башни крана или для удаления матчевого элемента из конструкции башни крана, а также управляющий блок для управления самоподъемным устройством. Кроме того, система характеризуется тем, что она содержит первый датчик для контролирования состояния соединительного средства самоподъемного устройства и/или конструкции башни, при этом первый датчик соединен с управляющим блоком.
Первый датчик может быть электромеханическим, индуктивным, емкостным, оптическим или ультразвуковым датчиком. Естественно, возможно также наличие нескольких первых датчиков для контролирования соединительных средств самоподъемного устройства и/или конструкции башни. При этом первый датчик может предпочтительно определять состояние соединительного средства в закрытом положении или в открытом положении. Дополнительно к этому, первый датчик предпочтительно может определять действующий на соединительное средство момент.
Башня крана содержит несколько расположенных друг над другом мачтовых элементов, которые соединены друг с другом. Как правило, отдельные мачтовые элементы соединены друг с другом с помощью болтов или аналогичных соединительных средств.
С помощью первого датчика контролируются состояния относящихся к безопасности соединительных средств, в частности, винтовых и/или болтовых соединений на самоподъемном устройстве, а также на самой башне. За счет этого можно распознавать неправильно установленные соединительные средства и передавать соответствующий сигнал в управляющий блок. Таким образом, с помощью первого датчика можно распознавать опасность вследствие неправильно установленного соединительного средства, которая может угрожать стабильности конструкции башни. Таким образом, соединение каждого вновь введенного матчевого элемента проверяется с помощью первого датчика. Датчик соединен через кабель или посредством радиосвязи с управляющим блоком и передает соответствующие сигналы о состоянии соединительного средства в управляющий блок.
Согласно другому варианту выполнения изобретения, управляющий блок содержит дополнительно интерфейс для соединения с управляющим устройством крана, так что обеспечивается возможность управления краном и самоподъемным устройством с помощью общего управляющего блока, предпочтительно управляющего блока для управления самоподъемным устройством.
Это обеспечивает особенно надежный процесс самоподъема, который может быть реализован с меньшими затратами персонала. Так, возможно, что хранящийся на земле мачтовый элемент поднимается с земли с помощью стрелы крана, высота крюка которого подлежит увеличению, и передает в самоподъемное устройство, при этом управление краном и самоподъемным устройством осуществляется с помощью управляющего как краном, так и самоподъемным устройством управляющего блока. При этом погрешности, которые могут возникать за счет расходящегося управления при передаче управляемых краном элементов в самоподъемное устройство, возникают менее часто, поскольку применяется общий управляющий блок. Поскольку дополнительно к этому управление осуществляется из «одних рук», то процесс самоподъема с помощью самоподъемной системы, согласно изобретению, упрощается и требует меньше обслуживающего персонала.
Интерфейс для соединения с управляющим устройством крана может быть выполнен с помощью кабеля или радиосвязи. Однако интерфейс выполнен так, что управляющий блок через него получает доступ к управлению краном и может управлять краном. В качестве альтернативного решения возможно также, что управление самоподъемным устройством может осуществляться с помощью управляющего устройства крана. Таким образом, обеспечивается, что управление краном и управление самоподъемным устройством может выполняться с помощью общего управляющего прибора.
Предпочтительно, самоподъемная система содержит второй датчик для обнаружения нанесенной на направляющую раму самоподъемного устройства или на конструкцию башни маркировки, которая позволяет судить об определенных свойствах конструкции башни, при этом второй датчик соединен с управляющим блоком.
Направляющая рама является наружной рамой самоподъемного устройства, которая обычно окружает снаружи матчевый элемент и соединена с ним так, что она может отдавливать верхнюю часть крана вверх. Распознаваемая с помощью второго датчика маркировка позволяет делать вывод об определенных свойствах конструкции башни. Эта информация передается в управляющий блок, который за счет этого может выполнять соответствующее уменьшение момента нагрузки во время самоподъема или же при работе крана.
Предпочтительно, управляющий блок для управления самоподъемным устройством предназначен для передачи команд управления в приводную кошку (тележку) самоподъемного устройства. С помощью этой приводной кошки мачтовый элемент перемещается горизонтально в созданное с помощью самоподъемного устройства свободное пространство. Приводная кошка используется также для перемещения приблизительно горизонтально подлежащего удалению из конструкции башни мачтового элемента, а затем опускания на землю с помощью функциональной верхней части крана.
Согласно другому оптимальному, предпочтительному признаку изобретения, система содержит дополнительно третий датчик для контролирования подъемного приспособления самоподъемного устройства, при этом третий датчик соединен с управляющим блоком.
Подъемное приспособление самоподъемного устройства поднимает все расположенные выше него элементы крана. В образованное с помощью подъемного приспособления свободное пространство можно затем вдвигать мачтовый элемент. Естественно, с помощью этого подъемного приспособления можно поднимать также расположенные над ним элементы крана, с целью удаления мачтового элемента из конструкции башни. При этом третий датчик контролирует, в частности, позицию, соответственно, положение подъемного приспособления, с целью получения информации о возможном удалении, соответственно, введении мачтового элемента. Дополнительно к этому, третий датчик соединен с управляющим блоком с помощью кабеля или радиосвязи, так что получаемая с помощью третьего датчика информация может передаваться в управляющий блок.
При этом третий датчик может быть предназначен для определения положения самоподъемного устройства на конструкции башни. Предпочтительно, третий датчик способен распознавать применяемую подъемным приспособлением опорную колодку и/или обнаруживать правильную посадку подъемного приспособления на колодке. Самоподъемное устройство опирается по меньшей мере на одну опорную колодку, которая передает отдаваемые подъемным приспособлением силы в конструкцию башни. При этом на мачтовом элементе могут быть установлены другие, расположенные в вертикальном направлении на расстоянии друг от друга опорные колодки. После введения мачтового элемента подъемное приспособление сменяет опорную колодку, на которую она опирается, на расположенную выше опорную колодку. Затем можно повторять введение матчевого элемента и поднимать кран выше.
Предпочтительно, система содержит дополнительно четвертый датчик для определения ориентации и угла наклона самоподъемного устройства и/или крана, при этом четвертый датчик соединен с управляющим блоком.
Четвертый датчик предпочтительно предназначен для измерения точного положения самоподъемного устройства, а также крана. За счет этого упрощается выравнивание крана. Выравнивание крана может также осуществляться автоматически с помощью управляющего устройства крана или с помощью управляющего блока. При этом происходит автоматическое управление движениями поворота, кошки, подъемного приспособления и стрелы.
Дополнительно к этому, согласно другому оптимальному признаку изобретения, можно измерять (регистрировать) все движения перемещения, а также положения механических компонентов с помощью систем измерения путей. При этом механическими компонентами являются поворотные движения крана, движение привода кошки, движение кошки самоподъемного устройства, которое используется для введения мачтового элемента в конструкцию башни посредством горизонтального перемещения или с помощью горизонтального перемещения из конструкции башни, вызванное движением подъемного механизма подъемного приспособления движение, движение стрелы, перемещение крюковой обоймы основной стрелы и/или движение балласта противовесной стрелы.
Система измерения путей реализована с помощью электромагнитных, индуктивных, емкостных, оптических или ультразвуковых датчиков. При этом возможна также комбинация датчиков различных типов. Система измерения путей способна измерять точное положение подробно поясненных выше механических компонентов. За счет этого можно, например, судить о положении закрепленного на приводной кошке самоподъемного устройства мачтового элемента. Предпочтительно, эта информация передается по кабельной или радиосвязи в управляющий блок.
Предпочтительно, самоподъемная система содержит пятый датчик для измерения момента по меньшей мере в одном месте самоподъемного устройства, при этом пятый датчик соединен с управляющим блоком. Соединение может быть реализовано с помощью проводов или без проводов. Предпочтительно, пятый датчик предусмотрен также на соединительных средствах, так что может измеряться приложенный к ним момент.
На основании измеряемых пятым датчиком данных возможно автоматическое выполнение монтажа башенной конструкции. Информация передается в управляющий блок и оценивается в нем, что приводит к соответствующему управлению необходимыми для монтажа и демонтажа электрическими, пневматическими и гидравлическими приспособлениями.
Согласно другой предпочтительной модификации системы, согласно изобретению, она содержит систему обнаружения для контролирования зоны между конструкцией башни и самоподъемным устройством и зоны, в которой мачтовый элемент вводится в конструкцию башни или удаляется из нее, при этом контролирование осуществляется предпочтительно с помощью системы световых решеток, лазеров, натяжных тросов или видеокамер. Предпочтительно, эта система обнаружения соединена с управляющим блоком.
Система обнаружения служит для раннего распознавания возможной опасной ситуации и предотвращения опасной ситуации с помощью соответствующего сигнала в управляющий блок. Таким образом, предпочтительно останавливается введение мачтового элемента в конструкцию башни, если в зоне опасности находится монтажный персонал. Кроме того, управляющий блок системы предпочтительно предназначен для управления самоподъемным устройством и/или краном так, что введение мачтового элемента в конструкцию башни или удаление мачтового элемента из конструкции башни осуществляется автоматизированно, без провоцирования при этом состояния перегрузки.
За счет того, что все положения подвижных частей на самоподъемном устройстве контролируются, возможна автоматизация процесса самоподъема крана. При этом предпочтительно с помощью датчиков измеряются прикладываемые к соединительным средствам, а также к направляющей раме самоподъемного устройства моменты. Эта информация обеспечивает возможность реализации автоматического монтажа, а также демонтажа соединительных средств (в частности, винтовых и болтовых соединений) с помощью электрических, пневматических и/или гидравлических приспособлений.
Предпочтительно, система содержит приспособление для соединения и рассоединения соединительных элементов, которое соединено с управляющим блоком и управляется им.
Согласно другому предпочтительному варианту выполнения изобретения, система содержит оптический индикаторный элемент для отображения различных состояний системы, при этом предпочтительно указываются также подлежащие выполнению действия.
Оптический индикаторный элемент может быть смонтирован на пульте управления и отображать с помощью дисплея или индикаторных элементов фактические состояния установки, а также необходимые в соответствии с ситуацией действия. В частности, пульт управления может быть дополнительно снабжен символами. Предпочтительно, пульт управления, а также возможно расположенные на нем оптические индикаторные элементы соединены с управляющим блоком системы. При этом возможно также, что пульт управления, а также сенсорная поверхность индикатора пульта управления обеспечивают возможность управления управляющим блоком.
Дополнительно к этому, отображение с помощью оптических индикаторных элементов обеспечивает возможность диагностики и указания неисправностей. За счет этого может быть значительно уменьшено вызванное неисправностями время простоя системы, поскольку проще локализуется источник неисправности. Возможно также отображение многих или всех измеряемых с помощью датчиков значений, так что можно оптически отображать различные стадии процесса самоподъема.
Предпочтительно, управление управляющим блоком осуществляется по кабелю или по радиосвязи с ограниченной дальностью действия. За счет этого можно гибко управлять системой с множества мест. Дополнительно к этому, управляющий блок содержит режим позиционирования, в котором может быть значительно уменьшена скорость подъемного приспособления, так что легче выполнять введение, а также демонтаж соединительных средств (винтовых и болтовых соединений).
Ниже приводится более подробное пояснение изобретения со ссылками на прилагаемые чертежи, на которых изображено:
фиг.1 - самоподъемная система, согласно изобретению, с конструкцией башни, на виде сбоку;
фиг.2 - схема самоподъемной системы, согласно изобретению;
фиг.3 - пульт управления с оптическими индикаторными элементами для управления управляющим блоком системы, согласно изобретению;
фиг.4а - отображение на пульте управления определенного состояния самоподъемной системы; и
фиг.4b - отображение на пульте управления другого определенного состояния самоподъемной системы.
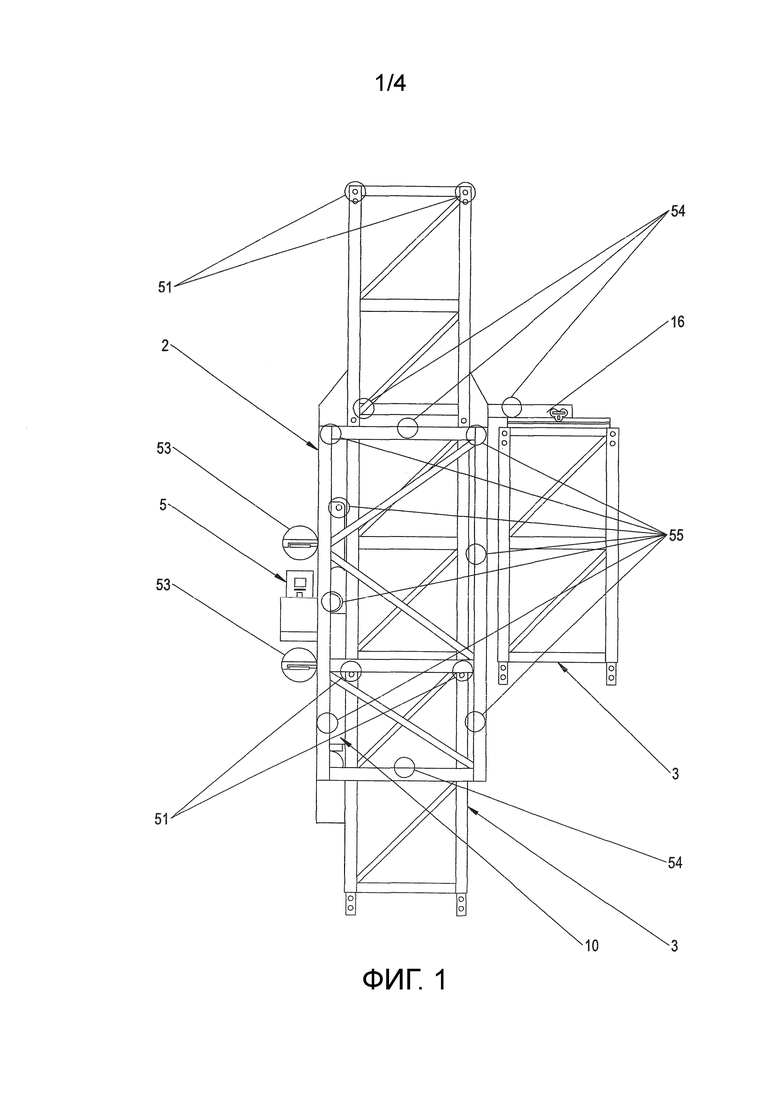
На фиг.1 показан участок башни крана, в котором расположена самоподъемная система 1. Самоподъемная система 1 содержит самоподъемное устройство, которое окружает башенную конструкцию 4. Самоподъемное устройство 2 соединено с расположенными над ним и под ним участками башни крана. Дополнительно к этому, оно имеет подъемное приспособление 10, которое может отдавливать вверх расположенный над самоподъемным устройством 2 участок крана от расположенного ниже самоподъемного устройства 2 участка крана. При этом подъемное приспособление 10 опирается на так называемые опорные колодки 14, которые выступают наружу на мачтовом элементе (= секция мачты) 3.
Кроме того, показан подлежащий введению мачтовый элемент 3, который подвешен к приводной кошке 16 самоподъемного устройства 2. Приводная кошка 16 обеспечивает возможность по существу горизонтального перемещения мачтового элемента, так что он может вводиться в образованное с помощью подъемного приспособления 10 свободное пространство. Мачтовый элемент передается с помощью смонтированной верхней части крана на смонтированное на определенной высоте самоподъемное устройство.
Дополнительно к этому, вблизи соединительных средств отдельных мачтовых элементов 3 имеется первый датчик 51, который контролирует состояние соединительного средства. Таким образом, может быть установлено, находятся ли соединительные средства между отдельными мачтовыми элементами 3 в их заданных положениях.
Кроме того, два третьих датчика 53 расположены на направляющей раме 7 самоподъемного устройства 2. Они способны определять положение подъемного механизма подъемного приспособления 10, и могут определять как раз применяемую опорную колодку 14, на которую опирается подъемное приспособление.
На расположенных вверху и внизу распорках направляющей рамы 7 расположены два четвертых датчика, которые могут определять наклон направляющей рамы 7, соответственно, башенной конструкции 4.
Кроме того, на направляющей раме 7 установлено несколько пятых датчиков 55, которые в их месте установки могут определять прикладываемые к направляющей раме моменты. За счет этого можно обнаруживать превышение допустимой механической нагрузки направляющей рамы 7, и с помощью подходящих контрмер возвращать нагрузку в нормальное состояние.
Все датчики соединены с управляющим блоком 5. Соединение может быть по проводам или беспроводным. Собираемая многими датчиками информация обрабатывается в управляющем блоке 5, так что обеспечивается возможность также автоматического самоподъема с помощью самоподъемной системы, согласно изобретению.
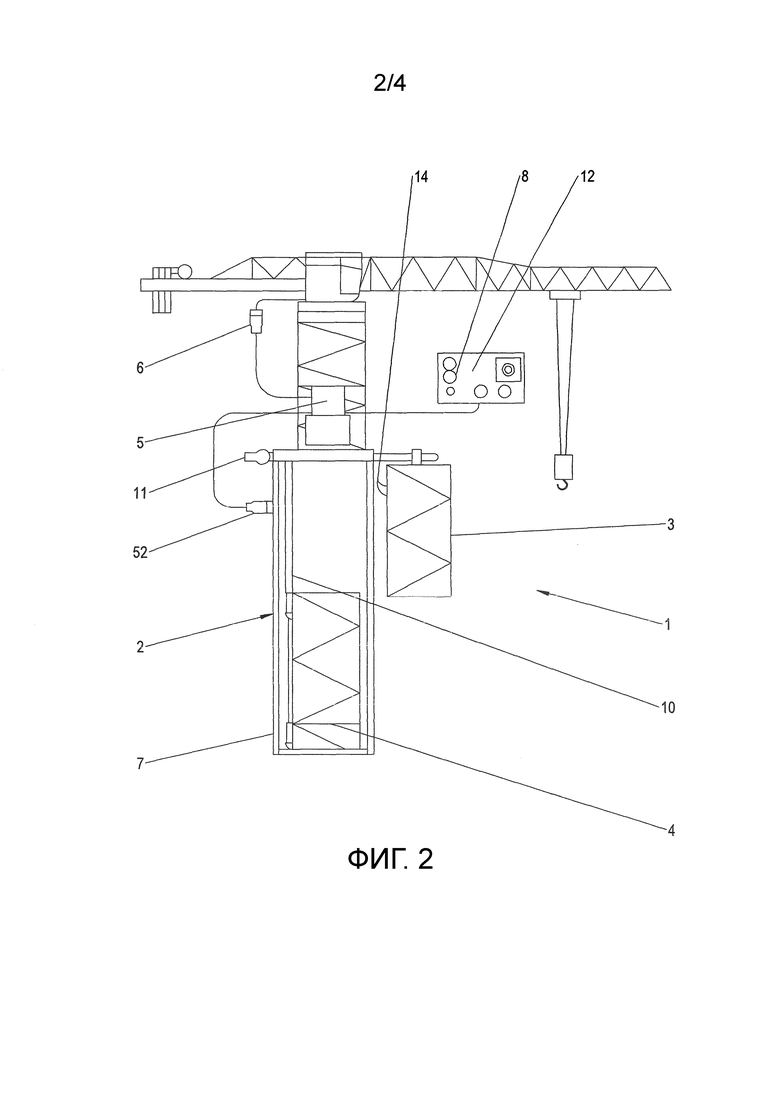
На фиг.2 показан кран, который имеет самоподъемную систему 1. Показано расположенное под верхней частью крана самоподъемное устройство 2, а также мачтовый элемент 3, который с помощью кошки можно вводить в образованное с помощью подъемного приспособления 10 свободное пространство. При этом мачтовый элемент 3 подвешен к относящейся к самоподъемному устройству 2 кошке 11. Для попадания в это положение мачтовый элемент 3 с помощью основной стрелы крана поднимается с земли и передается в самоподъемное устройство 2.
Самоподъемное устройство 2 находится в соединении с башенной конструкцией 4, т.е. опирается на нее, с целью образования зазора между башенной конструкцией и расположенными над самоподъемным устройством элементами крана.
Кроме того, показан управляющий блок 5, который соединен с пультом 12 управления для управления управляющим блоком. Показан также интерфейс управляющего блока 5, через который создается соединение с управляющим устройством крана. Кроме того, управляющий блок имеет соединение со вторым датчиком 52, который может обнаруживать нанесенную на башенную конструкцию 4 или на направляющую раму самоподъемного устройства 2 маркировку, за счет чего управляющий блок 5 получает информацию об определенных свойствах башенной конструкции 4. Таким образом, можно с помощью этой информации согласовывать управление краном с определенными свойствами во время процесса самоподъема. Например, можно ограничивать максимально поднимаемый краном груз или уменьшать максимальную длину стрелы во время самоподъема крана.
Интерфейс 6 управляющего блока 5 служит для соединения с управляющим устройством крана. При выполнении этого соединения возможно управление краном и самоподъемным устройством с помощью общего управления. При этом возможно согласованное управление краном и самоподъемным устройством. Таким образом, также без подачи сигнала управления, управляющий блок 5 может управлять краном. Это предпочтительно, в частности, когда с помощью показанных на фиг.1 датчиков распознается отклоняющееся от нормы состояние. При наклоне направляющей рамы 7, соответственно башенной конструкции 4, автоматически происходит перемещение противовеса, с целью компенсации наклона направляющей рамы, соответственно, башни крана.
На фиг.3 показан пульт 9 управления для управляющего блока 5. Показаны дисплей 8, а также расположенные рядом с дисплеем 8 индикаторы состояния и клавиши управления для взаимодействия с управляющим блоком 5.
На фиг.4а показано возможное изображение дисплея 8. При этом схематично показано поперечное сечение башенной конструкции 4 в зоне, в которой самоподъемное устройство 2 охватывает башню крана. Кроме того, показаны состояния отдельных соединительных средств 13, которые предназначены для вдвигания в предусмотренные для них противоположные элементы. В данном случае соединительные средства 13 являются болтами, которые предназначены для введения в согласованные приемные отверстия. Ни одно из соединительных средств 13 не находится в кинематическом соединении с башенной конструкцией 4, поскольку отображается, что соответствующие болты не соединены с ней.
Кроме того, с помощью графического изображения 15 показано состояние подъемного приспособления 10. Показано, что подъемный цилиндр подъемного приспособления 10 не находится в выдвинутом состоянии.
Дополнительно к этому, показан вид мачтового элемента 3, на котором показано несколько расположенных по вертикали друг над другом опорных колодок 14, на которые может опираться самоподъемное устройство. Справа рядом со стилизованным мачтовым элементом 3 показано также состояние подъемного приспособления 10, которое соответствует на фиг.4а введенному состоянию.
На фиг.4b показаны по существу те же символы, что и на фиг.4а. Изменено лишь их состояние. Так, на виде поперечного сечения башенной конструкции 4 два соединительных элемента 13 соединены с башней. Это означает введенный болт. Также средняя из трех расположенных друг над другом опорных колодок 14 изображена другим цветом. Это означает, что подъемное приспособление 10 находится в соединении с этой опорной колодкой и опирается на нее. Состояние самого подъемного приспособления также изменилось по сравнению с фиг.4а и отображено с помощью выдвинутого цилиндра.
С помощью этой визуализации оператор самоподъемной системы, согласно изобретению, может в короткое время обозревать все важные параметры системы и быстро распознавать возможные ошибки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ монтажа секций одноколонного наклонного пилона вантового моста и одностороннее самоподъемное устройство для монтажа секций стального пилона | 2021 |
|
RU2815701C1 |
| САМОПОДЪЕМНЫЙ БАШЕННЫЙ КРАН | 1971 |
|
SU422679A1 |
| Строительно-монтажный самоподъемный самоходный кран | 1951 |
|
SU94368A1 |
| Самоподъемный башенный кран | 1979 |
|
SU800115A1 |
| Самоподъемный кран Я.И.Водяницкого | 1989 |
|
SU1773854A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛИРОВАНИЯ РАБОЧИХ ПАРАМЕТРОВ И/ИЛИ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ИЗНОСА ТРОСА ПРИ ИСПОЛЬЗОВАНИИ В ПОДЪЕМНЫХ МЕХАНИЗМАХ | 2017 |
|
RU2729841C2 |
| Самоподъемный кран | 1989 |
|
SU1705231A1 |
| Механизм самоподъема башенного крана | 1980 |
|
SU950663A1 |
| КРАН | 2017 |
|
RU2734966C2 |
| КРАН И СПОСОБ УПРАВЛЕНИЯ ТАКИМ КРАНОМ | 2017 |
|
RU2728315C2 |


Изобретение относится к самоподъемной системе для крана. Система содержит самоподъемное устройство (2) для введения матчевого элемента (3) или для удаления матчевого элемента (3) из конструкции (4) башни крана, и управляющий блок (5) для управления самоподъемным устройством (2). Система дополнительно содержит первый датчик (51) для контролирования состояния соединительного средства самоподъемного устройства (2) и/или конструкции (4) башни, при этом первый датчик (51) соединен с управляющим блоком (5). Достигается упрощение процесса самоподъема крана и повышение безопасности процесса самоподъема. 9 з.п. ф-лы, 5 ил.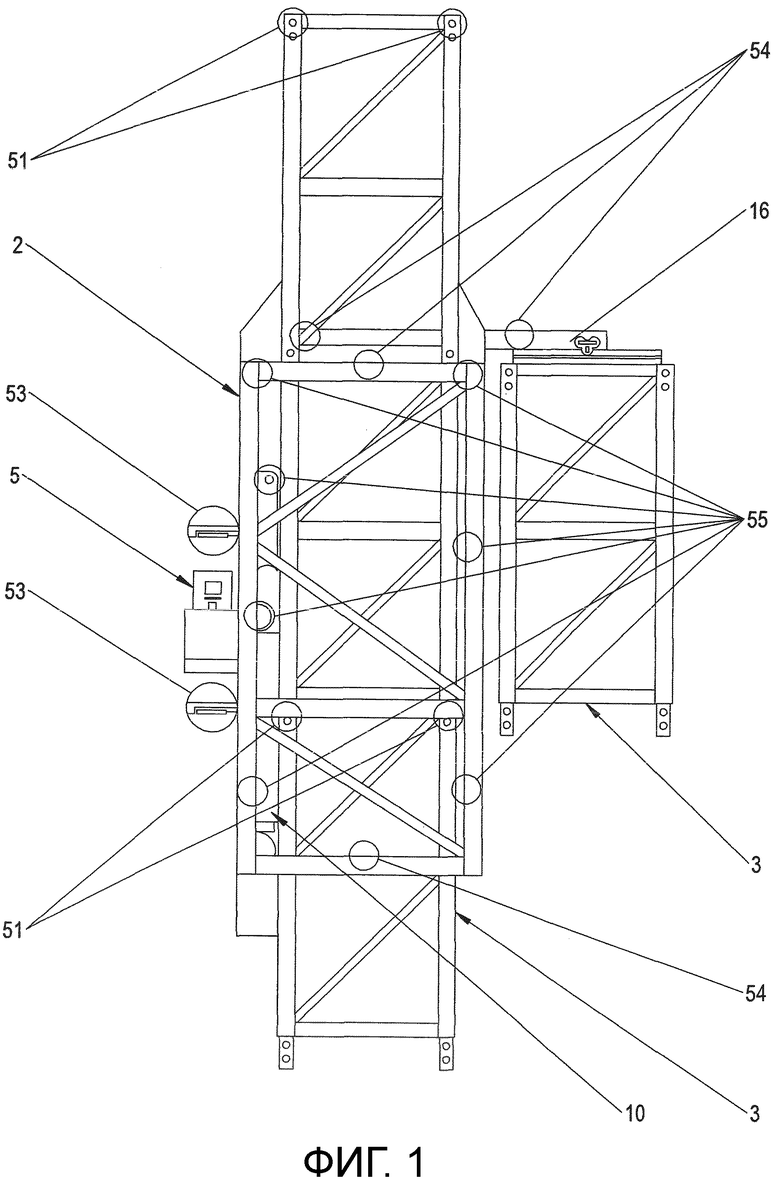
1. Самоподъемная система (1) для крана, содержащая
самоподъемное устройство (2) для введения мачтового элемента (3) или для удаления мачтового элемента (3) из конструкции (4) башни крана, и
управляющий блок (5) для управления самоподъемным устройством (2),
отличающаяся тем, что предусмотрен первый датчик (51) для контролирования состояния соединительного средства (13) самоподъемного устройства (2) и/или конструкции (4) башни, при этом первый датчик (51) соединен с управляющим блоком (5).
2. Система (1) по п.1, в которой управляющий блок (5) содержит интерфейс (6) для соединения с управляющим устройством крана, так что обеспечивается возможность управления краном и самоподъемным устройством (2) с помощью общего управляющего блока, предпочтительно управляющего блока (5).
3. Система (1) по п.1 или 2, дополнительно содержащая второй датчик (52) для обнаружения нанесенной на направляющую раму (7) самоподъемного устройства (2) или на конструкцию (4) башни маркировки, которая позволяет судить об определенных свойствах конструкции (4) башни, при этом второй датчик (52) соединен с управляющим блоком (5).
4. Система (1) по любому из пп.1-3, дополнительно содержащая третий датчик (53) для контролирования подъемного приспособления (10) самоподъемного устройства (2), при этом третий датчик (53) соединен с управляющим блоком (5).
5. Система (1) по любому из пп.1-4, дополнительно содержащая четвертый датчик (54) для определения ориентации и угла наклона самоподъемного устройства (2) и/или крана, при этом четвертый датчик (54) соединен с управляющим блоком (5).
6. Система (1) по любому из пп.1-5, дополнительно содержащая
пятый датчик (55) для измерения момента по меньшей мере в одном месте самоподъемного устройства (2), при этом пятый датчик (55) соединен с управляющим блоком (5).
7. Система (1) по любому из пп.1-6, дополнительно содержащая систему обнаружения для контролирования зоны между конструкцией (4) башни и самоподъемным устройством (2) и зоны, в которой мачтовый элемент (3) вводится в конструкцию (4) башни или удаляется из нее, при этом контролирование осуществляется предпочтительно с помощью системы световых решеток, лазеров, натяжных тросов и/или видеокамер.
8. Система (1) по любому из пп.1-7, в которой управляющий блок (5) предназначен для управления самоподъемным устройством (2) и/или краном так, что введение мачтового элемента (3) в конструкцию (4) башни или удаление мачтового элемента (3) из нее осуществляется автоматизированно.
9. Система (1) по п.8, дополнительно содержащая по меньшей мере одно устройство для соединения и рассоединения соединительных средств (13), которое соединено с управляющим блоком (5) и выполнено с возможностью управления им.
10. Система (1) по любому из пп.1-9, дополнительно содержащая оптические индикаторные элементы (8) для отображения различных состояний системы (1) и предпочтительно для индикации подлежащих выполнению действий.
| WO 2014048516 A1, 03.04.2014 | |||
| DE 202005009236 U1, 21.09.2006 | |||
| СПОСОБ БЕЗОПАСНОГО УПРАВЛЕНИЯ/КОНТРОЛЯ РАСКЛАДЫВАНИЕМ И СКЛАДЫВАНИЕМ БАШЕННОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2328441C2 |

