Изобретение относится к технологии лазерной обработки материалов и может быть использовано в различных технологических процессах, а именно нагрев, очистка, резка, создание аморфных слоев.
Известно устройство электрогидродинамической очистки подводной поверхности судов, относящееся к области защиты корпусов судов, а также гидротехнических сооружений от биологического обрастания, содержащее две гидравлически сообщающиеся трубы малого и большого диаметра с поршнями, внешний конец трубы меньшего диаметра снабжен днищем, выполненным в форме полусферы, в фокусе которой установлены разрядные электроды, а с внешней стороны трубы большего диаметра установлено щелевидное сопло (см. патент RU № 2438916, МПК В63В59/08, В63С11/52, 2012 г.).
Недостатком этого устройства является сложность его позиционирования относительно очищаемой поверхности, поскольку очистка идет жидкостью – продуктом электрогидравлического эффекта, что в водной среде приводит к проявлениям реактивного эффекта.
В качестве ближайшего аналога принято устройство для лазерной очистки, содержащее корпус с размещенным внутри лазером и отверстием-соплом для вывода лазерного излучения, являющийся наиболее близким к заявляемому изобретению и принятый за прототип (https://www.laser-bulat.ru/products/lasersystems/htf-clean/, [электронный ресурс] дата обращения 15.10.2018). Устройство представляет собой моноблок, содержащий в себе лазерный источник и все органы управления. Лазерное излучение проходит через объектив и падает на обрабатываемую поверхность.
Недостатком этого технического решения является невозможность работы под водой.
Основной задачей, на решение которой направлено заявленное изобретение, является обеспечение возможности очистки корпусов судов под водой.
Технический результат заявляемого устройства заключается в обеспечении возможности его работы под водой, при упрощении его позиционирования над очищаемой поверхностью.
Поставленная задача решается тем, что устройство для лазерной очистки корпуса судна, содержащее контейнер с отверстием для вывода лазерного излучения и лазер, отличается тем, что контейнер выполнен герметичным, снабжен фокусирующей и сканирующей системой, выходное отверстие которой, выполнено как щелевидный конфузор, причем контейнер установлен на телеуправляем необитаемом подводном аппарате, его фокусирующая и сканирующая система посредством оптоволокна сообщена с лазером, установленным на борту судна, причем полость конфузора, сообщена посредством гибкого шланга с источником сжатого воздуха, установленного на борту судна, кроме того, сканирующая система выполнена, с возможностью формирования лазерного излучения по длине щелевидного конфузора.
Сопоставительный анализ существенных признаков заявленного технического решения с существенными признаками прототипа и аналогов свидетельствует о его соответствии критерию «новизна».
При этом совокупность признаков отличительной части формулы изобретения обеспечивает возможность работы под водой, при упрощении его позиционирования над очищаемой поверхностью, причем отличительные признаки отличительной части формулы изобретения обеспечивают решение нижеследующего комплекса функциональных задач.
Признаки, указывающие, что «контейнер выполнен герметичным, снабжен фокусирующей и сканирующей системой» исключают заполнение корпуса водой и прямое взаимодействие с ней лазерного излучения.
Признаки, указывающие, что сканирующая система «выходное отверстие которой выполнено как щелевидный конфузор» обеспечивают уменьшение поперечного сечения выходного отверстия, что упрощает организацию газовой «оболочки» в его полости, при условии подачи в него газа от источника газа.
Признаки, указывающие, что «контейнер установлен на телеуправляем необитаемом подводном аппарате» обеспечивают возможность работы устройства лазерной очистки под водой дистанционно.
Признаки, указывающие, что «фокусирующая и сканирующая система посредством оптоволокна сообщена с лазером, установленным на борту судна» обеспечивают возможность изолирования лазерного излучения от воздействия воды.
Признаки, указывающие, что «полость конфузора, сообщена посредством гибкого шланга с источником сжатого воздуха, установленного на борту судна» обеспечивают в конфузоре давление несколько большее давления воды на глубине, что предотвращает попадание жидкости внутрь конфузора при работе под водой.
Признаки, указывающие, что «сканирующая система выполнена, с возможностью формирования лазерного излучения по длине щелевидного конфузора» позволяют повысить производительности устройства за счет придания щелевидности пятну лазерного излучения.
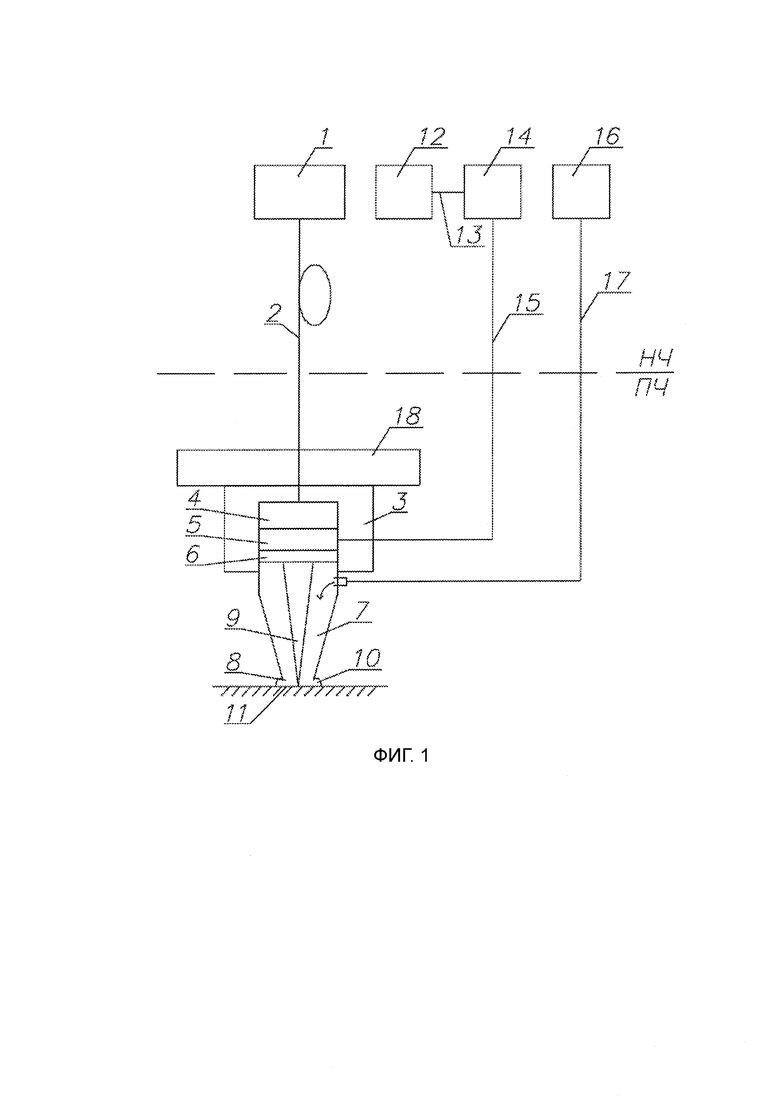
Сущность заявляемого изобретения поясняется чертежом, где на фиг. 1 изображено устройство для лазерной очистки.
На чертежах показаны лазер 1, оптоволокно 2, герметичный контейнер 3, фокусирующая система 4, сканирующая система 5, защитное стекло 6, щелевидный кожух 7, плоская щель 8, сфокусированное лазерное излучение 9, газовая оболочка 10, обрабатываемая поверхность 11, персональный компьютер 12, кабель управления контроллером 13, контроллер 14, кабель управления системой сканирования лазерного луча 15, источник сжатого воздуха (пневматическая магистраль судна) 16, гибкий шланг 17, телеуправляемый необитаемый подводный аппарат 18.
Устройство состоит из надводной и подводной частей.
Надводная часть устройства состоит из корпуса, выполненного герметичным и служащего для размещения лазера 1, работающего в импульсном режиме, кабельных вводов (на чертежах не показаны) для питания лазера электроэнергией и оптоволокна 2 длиной от 10 до 100 метров, для управления режимом сканирования лазерного луча, по кабелю управления 13 подключен контроллер 14 с персональным компьютером 12.
Подводная часть устройства состоит из телеуправляемого необитаемого подводного аппарата 18 с установленным герметичным контейнером 3 внутри которого находится фокусирующая система 4 и сканирующая система (сканатор) 5 с защитным стеклом 6 прозрачным для лазерного излучения, и щелевидным кожухом 7 с плоской щелью 8, через которую выводится сфокусированное лазерное излучение 9 на обрабатываемую поверхность 11. Причем к щелевидному кожуху 7 подключен источник сжатого воздуха 16 (пневматическая магистраль судна) с помощью гибкого шланга 17.
Работает устройство следующим образом.
Предварительно осуществляют подготовку устройства лазерной очистки к работе. Для этого на палубе судна устанавливают лазер 1, контроллер 14 и персональный компьютер 12. Лазер 1 соединяют с фокусирующей системой 4 с помощью оптоволокна 2. Контроллер 14 подключают к сканирующей системе 5 и к персональному компьютеру 12 с помощью кабелей управления 13 и 15 соответственно. Щелевидный кожух 7 подключают к источнику сжатого воздуха 16 с помощью гибкого шланга 17. Герметичный контейнер 3 с элементами «устройства» размещают на телеуправляемом необитаемом подводном аппарате 18 и погружают под воду, предварительно создав давление сжатого воздуха в щелевидном кожухе 7 от 6 до 16 бар. Включают питание лазера 1 и персонального компьютера 12. Программно устанавливают заданный режим сканирования лазерного луча и частоту импульсов лазерного излучения.
Телеуправляемый необитаемый подводный аппарат 18 с герметичным контейнером 3 ориентируют (позиционируют) в воде таким образом, чтобы плоская щель 8 находилась над обрабатываемой поверхностью 11 на расстоянии от 2 до 10 мм. Включают импульсное лазерное излучение на лазере 1 и перемещают телеуправляемый необитаемый подводный аппарат 18 в заданном направлении над обрабатываемой поверхностью 11. Сфокусированный сканирующий в плоской щели 8 лазерный луч 9, находясь в области воздушного (газового) пузыря 10, попадает на обрабатываемую поверхность 11 и в режиме абляции удаляет биообрастатели.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ ЛАЗЕРНЫЙ МОДУЛЬ МЛМ (КОМПЛЕКС) | 2021 |
|
RU2769194C1 |
| ПОГРУЖАЕМАЯ ПЛАТФОРМА-ТРАНСФОРМЕР И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОСУЩЕСТВЛЕНИЯ ПОДВОДНЫХ РАБОТ | 2010 |
|
RU2438914C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| БЫСТРОХОДНОЕ СПАСАТЕЛЬНОЕ СУДНО | 2023 |
|
RU2798921C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2024 |
|
RU2829517C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
Изобретение относится к устройству для лазерной очистки корпуса судна. Устройство содержит контейнер с отверстием для вывода лазерного излучения и лазер. Контейнер выполнен герметичным с фокусирующей и сканирующей системой, выходное отверстие которой выполнено как щелевидный конфузор. Контейнер установлен на телеуправляемом необитаемом подводном аппарате. Фокусирующая и сканирующая система посредством оптоволокна сообщена с лазером, установленным на борту судна. Полость конфузора сообщена посредством гибкого шланга с источником сжатого воздуха, установленного на борту судна. Сканирующая система выполнена с возможностью формирования лазерного излучения по длине щелевидного конфузора. Технический результат изобретения заключается в обеспечении возможности работы под водой при упрощении позиционирования устройства над очищаемой поверхностью. 1 ил.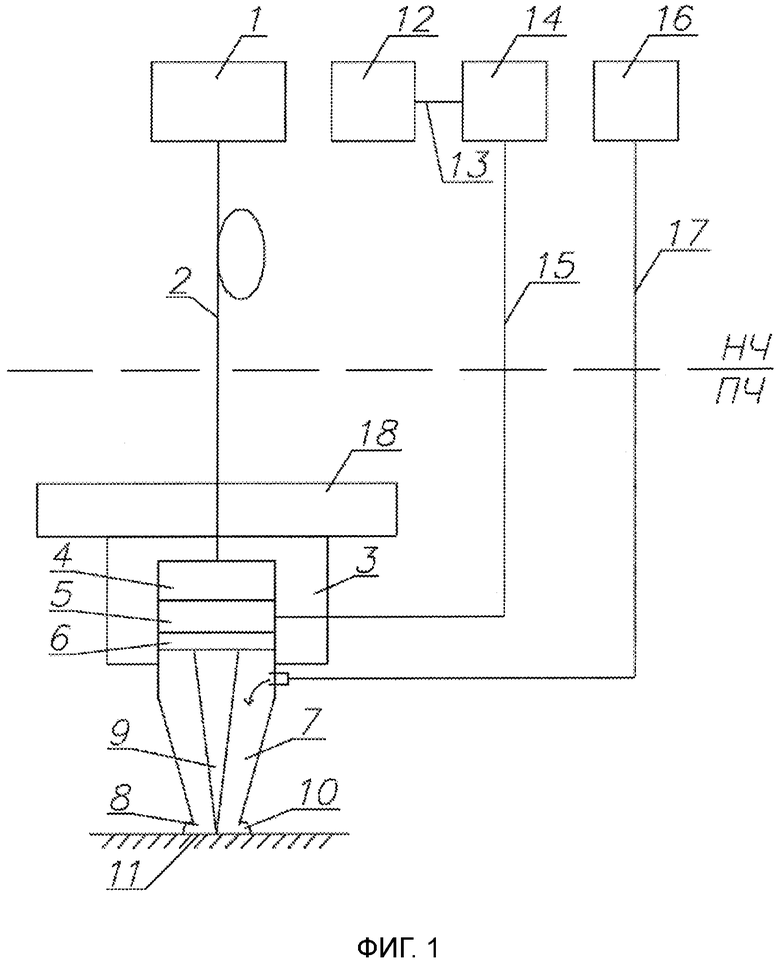
Устройство для лазерной очистки корпуса судна, состоящее из надводной и телеуправляемой подводной частей, при этом надводная часть содержит лазер и источник сжатого воздуха, устанавливаемые на борту судна, а телеуправляемая подводная часть содержит фокусирующую и сканирующую системы, сообщенные с лазером посредством оптоволокна, и герметичный контейнер с щелевидным кожухом, в котором выполнена плоская щель для вывода лазерного излучения, при этом фокусирующая и сканирующая системы установлены в упомянутом контейнере, а полость плоской щели сообщена посредством гибкого шланга с источником сжатого воздуха, причем сканирующая система выполнена с возможностью формирования лазерного излучения по длине плоской щели.
| RU2016123158 A, 14.12.2017 | |||
| Многофункциональный комплекс для выполнения подводно-технических работ | 2017 |
|
RU2653527C1 |
| RU 2016123158 A, 14.12.2017 | |||
| US 20170081000 A1, 23.03.2017 | |||
| US 5852984 A1, 29.12.1998 | |||
| JP 2011016153 A,27.01.2011 | |||
| JP 8103882 A, 23.04.1996 | |||
| JP 2005081368 A, 31.03.2005 | |||
| JP 9010980 A, 14.01.1997 | |||
| JP 7001171 A, 06.01.1995 | |||
| JP 8206869 A, 13.08.1996. | |||

