Настоящее изобретение относится к устройству для ориентирования деталей, в частности, для захвата роботами, средствами автоматизации и т.п.
Изобретение относится к области промышленной автоматизации или в любом случае, ко всем областям, в которых могут внедряться автоматические роботизированные системы, в которых существует постоянно растущий спрос на гибкие автоматизированные системы, способные удовлетворить самые разнообразные требования.
В частности, ожидается, что устройство по настоящему изобретению будет применяться в области производства резины, пластика и других синтетических материалов, стекла, в пищевой промышленности, при производстве косметики, лекарственных средств, медицинских изделий, деталей автомобилей, электробытовых приборов, компьютеров, при производстве бытовой электроники, небольших металлоизделий, в деревообрабатывающей промышленности, при производстве мебельной фурнитуры и пр.
Все сильнее чувствуется потребность в поставке различных систем промышленной автоматизации в ответ на различные производственные требования.
Современные промышленные изделия фактически характеризуются все более коротким сроком службы, сокращением объемов производства и, следовательно, необходимостью в быстрой адаптации систем к изменяющимся производственным требованиям и, одновременно, стремлением минимизировать расходы на такую адаптацию.
Такая способность систем к адаптации к разным объемам производства и переналадке на производство других изделий часто является единственным экономическим оправданием сохранения систем автоматизированного производства и отказа от возвращения к ручным системам, несмотря на то, что системы автоматического производства более дороги и менее производительны, но обладают значительно большей гибкостью, и что заставляет компании переводить производство в страны с более удобной рабочей силой.
Известны подающие устройства, которые называют просто "питатели", которые управляются роботами, работающими в картезианской системе координат, антропоморфными роботами, цилиндрическими роботами и пр.
Такие питатели оснащены системами искусственного зрения, такими как линейные камеры, матричные камеры, трехмерные камеры и т.п., которые требуют особых условий освещения, чтобы получить изображения с высоким контрастом между фоном и распознаваемыми деталями, чтобы иметь возможность отправки таких изображений на программные средства анализа изображений для распознавания деталей.
Условия освещения можно создавать с помощью внешнего освещения сверху, или заднего освещения, когда осветительное устройство обычно размещают под столом, на которой лежат детали.
Питатель заполняется снаружи с некоторыми интервалами времени, вручную, с помощью бункера, ленточного подъемника или другого технически эквивалентного средства.
Система искусственного зрения распознает нужную для производства деталь, загруженную в питатель, и робот захватывает ее. Такие известные устройства подают детали, которые образуют запас заготовок для роботов, с помощью механических вибраций и/или линейным движением с помощью моторизованных ремней.
Проблема таких питателей заключается в том, что когда подаваемые детали содержат по меньшей мере одну цилиндрическую деталь, такая деталь имеет тенденцию катиться, которые по статистике в большинстве случаев создают трудности для захвата и, следовательно, не подаются на робот.
В питателе такого типа, осуществляющего линейную подачи и/или вибрационную подачу, в любом случает невозможно изменить положение и расположение деталей на поверхности, что замедляет производственную цепочку и удорожает производство.
Кроме того, из-за затрудненного доступа к внутренним частям известных питателей возникают трудности с очисткой системы освещения, расположенной под столом, что снижает качество системы зрения и, следовательно, эффективность производства.
Чтобы устранить вышеописанные недостатки, было разработано питающее устройство, способное изменять ориентацию деталей так, чтобы облегчить их захват роботом.
В таком известном устройстве применяется круглый стол, которая вращается вокруг собственного центра и подвергается толчкам от средства генерирования импульсов, чтобы встряхивать отдельные детали, пока они не примут требуемое положение.
Такое известное устройство не лишено недостатков, одним из которых является то, что, если детали не ориентированы в правильное положение для их захвата, существует риск, что система загрузки устройства, продолжая подавать детали, перенасытит поверхность подвижного стола, что воспрепятствует ей выполнять свои функции.
Кроме того, это и другие известные устройства имеют недостаток, заключающийся в том, что, если на деталях, которыми манипулируют, несут следы масла или грязи, такие следы могут быть перенесены на подвижный стол, мешая осветительному средству создавать нужный видимый контраст между фоном и деталями, который необходим средству искусственного зрения для идентификации деталей на подвижном столе.
Целью настоящего изобретения является устранение вышеописанных недостатков известных типов питателей, таких. как описаны выше, создав эффективное устройство ориентирования, которое позволяет менять расположением деталей и их положение на поверхности, в то же время не допуская появления следов масла и грязи и переполнения подвижного стола, мешающие средству искусственного зрения идентифицировать детали, подлежащие подбору.
В рамках этой цели объектом настоящего изобретения является ориентирующее устройство, обеспечивающее легкий доступ к внутренним частям, тем самым упрощая очистку системы зрения.
Другим объектом изобретения является ориентирующее устройство, легкое в сборке с помощью средств, легко доступных на рынке и с применением обычно используемых материалов так, чтобы устройство было экономически конкурентоспособно.
Эта цель и эти и другие объекты, которые будут более понятны, реализуются устройством для ориентирования деталей, в частности, для захвата роботами, средствами автоматизации и т.п., которое содержит опорную раму, образующую опорную поверхность, на которую опирается с возможностью вращения подвижный стол, связанный с двигательным средством для его вращения вокруг оси вращения, по существу перпендикулярной это опорной поверхности, средство искусственного зрения для распознавания подлежащих захвату деталей, расположенных на подвижном столе, далее снабженном средством генерирования импульсов, соединенным с опорной рамой и воздействующим на подвижный стол точно и локализовано по прямой линии воздействия, по существу перпендикулярной подвижному столу, для изменения ориентации подлежащих захвату деталей так, чтобы их можно было захватывать роботом, средством автоматизации и т.п. отличающимся тем, что содержит периметрическую канавку, образованную на опорной поверхности так, что она является радиально внешней относительно подвижного стола для облегченного удаления масляных веществ или грязи, имеющихся на подлежащих захвату деталях и переносимых на подвижный стол вследствие движения этих подлежащих захвату деталей по действием средства генерирования импульсов.
Другие отличительные признаки и преимущества изобретения будут боле понятны из подробного описания предпочтительного, но не исключительного варианта устройства для ориентирования деталей, в частности для захвата роботами, средствами автоматизации и т.п. по настоящему изобретению, которое проиллюстрировано в качестве не ограничивающего примера на приложенных чертежах, где:
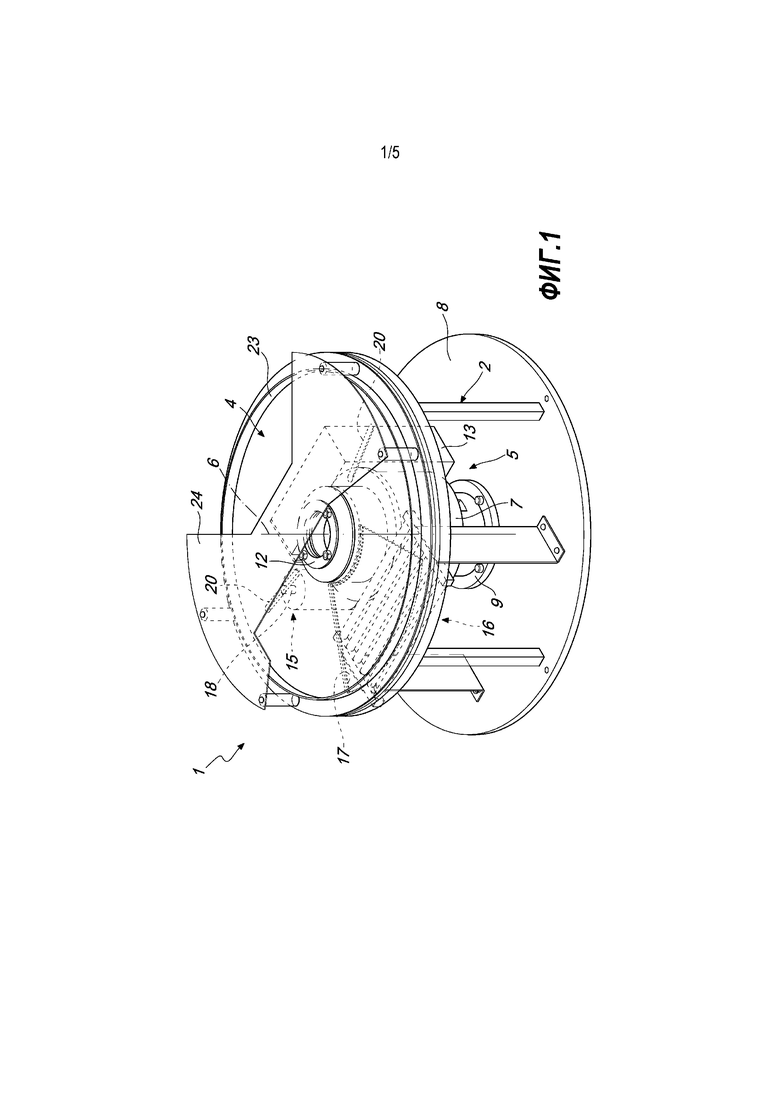
Фиг. 1 - вид в перспективе варианта ориентирующего устройства по настоящему изобретению.
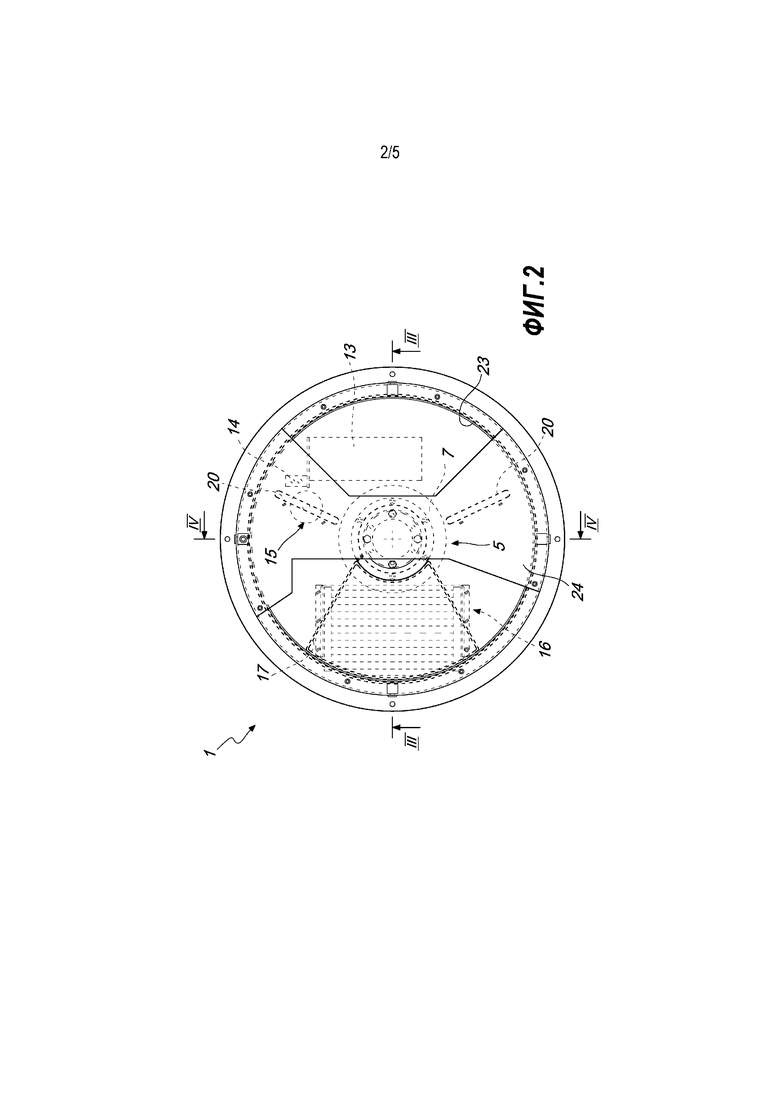
Фиг. 2 - вид сверху устройства по фиг. 1.
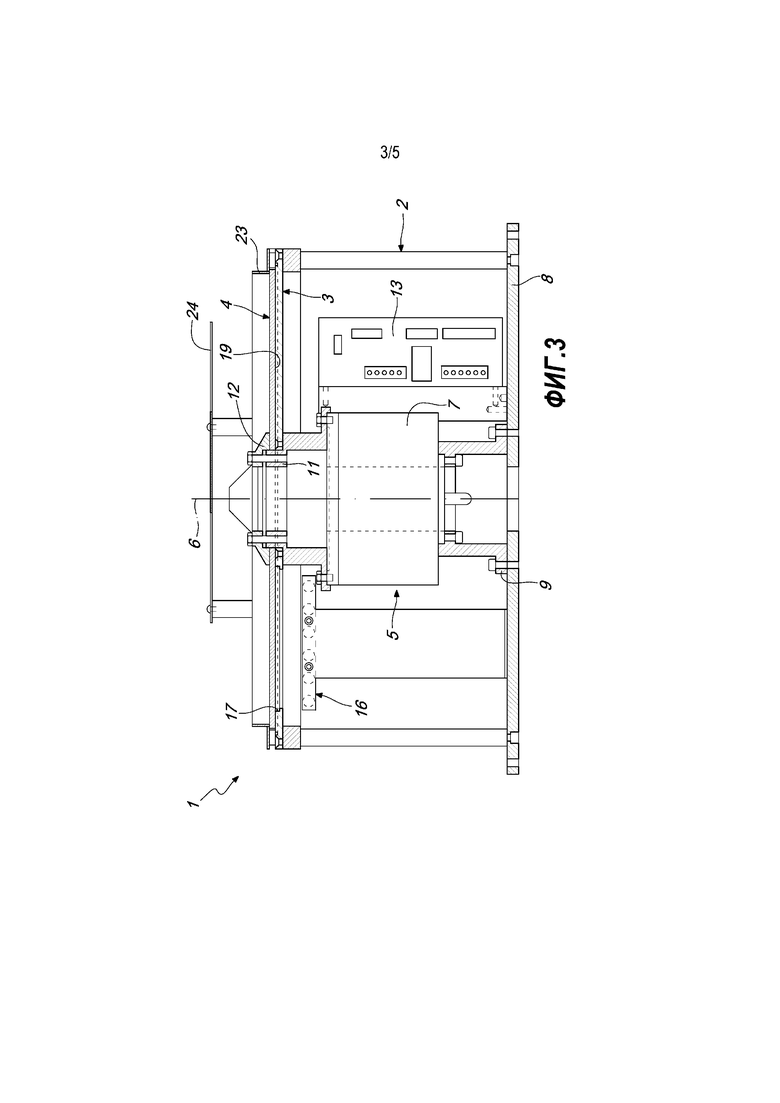
Фиг. 3 - сечение устройства по фиг. 2 по линии III-III.
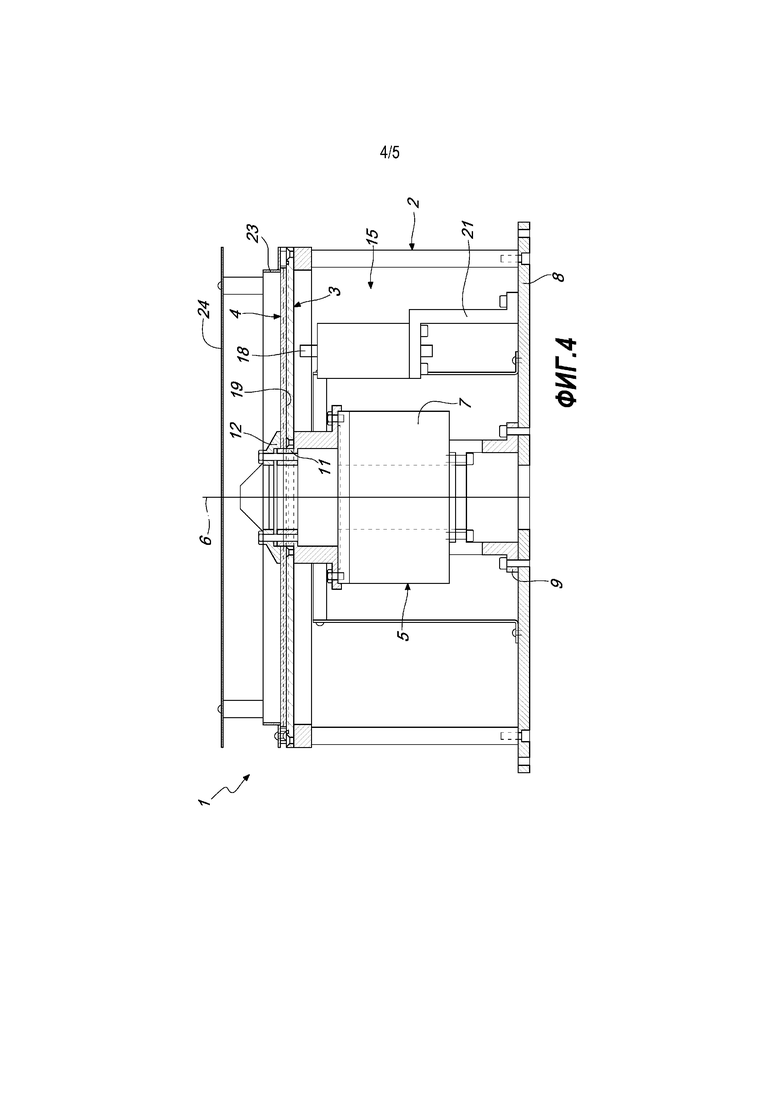
Фиг. 4 - сечение устройства по фиг. 2 по линии IV-IV.
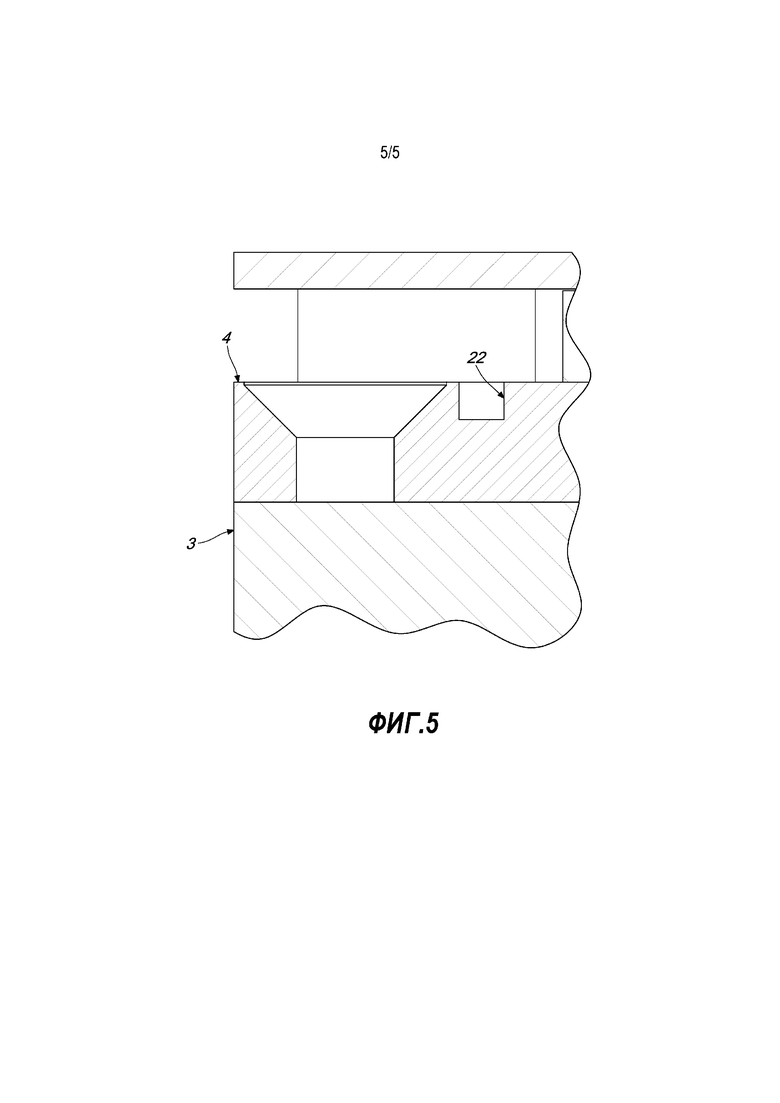
Фиг. 5 - деталь устройства по фиг. 4 в увеличенном масштабе.
Как показано на чертежах, устройство для ориентирования деталей, в частности, для захвата роботами, средствами автоматизации и т.п., в целом обозначенное позицией 1, содержит опорную раму 2, которая образует опорную поверхность 3, на которую опирается с возможностью вращения подвижный стол 4, связанный с двигательным средством 5 для его вращения вокруг оси 6 по существу перпендикулярной опорной поверхности 3.
Более подробно, двигательное средство 5 может содержать двигатель 7 электрического типа, например, асинхронный электродвигатель, опирающийся на опорную раму 2 и зафиксированный на основании 8 устройства 1 с помощью опоры 9 двигателя.
В предложенном варианте подвижный стол 4 имеет по существу круглую форму и непосредственно связан с приводным валом 7 двигателя 7 и зафиксирован на нем с возможностью вращения как одно целое с ним вокруг оси 6 вращения через захватывающий фланец 11 и затягивающий фланец, которые находятся в зацепление друг с другом так, что подвижный стол 4 зажат между ними.
Таким образом, центр подвижного стола 4 лежит на оси 6 вращения.
Для удобства двигательное средство 5 может содержать приводной двигатель 13, зафиксированный на основании 8 кронштейном 14 адаптера.
Таким образом, двигатель 7 имеет возможность работать со управляемой и переменной скоростью и/или управляемыми и переменными ускорениями в соответствии с характеристиками деталей, загружаемых в устройство 1.
Кроме того, имеется средство искусственного видения для распознавания подлежащих захвату деталей, расположенных на подвижном столе 4, и средство 15 для генерирования импульсов, соединенное с опорной рамой 2 и воздействует на подвижный стол 4 точно и локализовано вдоль прямой линии воздействия, по существу перпендикулярной подвижному столу 4, для изменения ориентации подлежащих захвату деталей так чтобы их мог захватить роботами, средствами автоматизации и т.п.
Средство искусственного зрения может быть расположено снаружи и над устройством 1, и поскольку оно известно, его подробное описание и иллюстрация опускаются.
По существу, средство искусственного зрения может содержать оптическую видеокамеру и средство 16 подсветки, связанное с опорной рамой 2 и расположенное на противоположной стороне подвижного стола 4 относительно опорной поверхности 3 у средства искусственного зрения, для задней подсветки подлежащих захвату деталей, расположенных на подвижном столе 4 так, чтобы обеспечить их идентификацию средством искусственного зрения.
Обычно подвижный стол 4 изготавливают из материала, проницаемого для света и упруго гибкого, а в опорной поверхности 3 имеется окно 17, имеющее форму по существу сектора круга, и снабженное адаптированным стеклом для защиты, образуемым у средства задней подсветки так, чтобы обеспечить заднюю подсветку подвижного стола 4.
Средство 15 генерирования импульсов содержит ударный магнит 18, соединенный с опорной рамой 2 и воздействующий на нижнюю поверхность 19 подвижного стола 4 через по меньшей мере одно отверстие 20, образованное на опорной поверхности 3 на расстоянии от окна 17.
Для удобства можно создать два взаимно противоположных отверстия 20 так, чтобы создать возможность установки средства 15 генерирования импульсов в двух разных местах устройства 1 в соответствии с требованиями компоновки, определяемыми устройством для захвата деталей.
Преимущественно средство 15 для генерирования импульсов связано с опорной рамой 2 подвижным ползуном 21, выполненным с возможностью допускать движение ударного магнита 18 в радиальном направлении относительно оси 6 вращения.
Для удобства отверстие 20 имеет форму паза, удлиненного в радиальном направлении относительно оси 6 вращения, в соответствии с движением ударного магнита под действием подвижного ползуна 21.
Таким образом, ударный магнит 18 в любой момент времени можно позиционировать в периферийном положении относительно центра подвижного стола 4 так, чтобы иметь возможность воздействовать на все радиальное протяжение подвижного стола 4.
Согласно настоящему изобретению на опорной поверхности 3 образована периметрическая канавка 22, находящаяся радиально снаружи от подвижного стола 4 для облегченного удаления маслянистых веществ и грязи, присутствующих на подлежащих захвату деталях и, следовательно, переносимых на подвижный стол 4 вследствие движения подлежащих захвату деталей под действием средства 15 генерирования импульсов.
Кроме того, радиально снаружи от подвижного стола 4 может быть выполнен кольцевой буртик 23, выполненный с возможностью радиально удерживать подлежащие захвату детали, и закрывающий элемент 24, выполненный как одно целое с опорной рамой 2 и расположенный над подвижным столом 4 и средством 15 для генерирования импульсов для вертикального удержания подлежащих захвату деталей вследствие действия средства 15 для генерирования импульсов.
Таким образом, устройство 1 по настоящему изобретению можно разделить на по меньшей мере один сектор захвата деталей, образованный около средства искусственного зрения, по меньшей мере один сектор ориентирования деталей, образованный у средства 15 генерирования импульсов, и по меньшей мере один сектор для загрузки деталей с помощью бункера и т.п.
Далее следует описание работы устройства 1 для ориентирования деталей, в частности, для захвата роботами, средствами автоматизации и т.п.
С помощью бункера, ленточного подъемника, вручную или другими известными средствами устройство 1 можно заполнять снаружи с заранее заданными интервалами времени деталями, которые следует ориентировать, чтобы их мод подобрать робот и т.п.
Детали выгружаются на подвижный стол 4 в секторе загрузки в произвольном положении и, благодаря вращению подвижного стола 4, они располагаются в секторе захвата, где робот после оборота захватывает детали, распознанные средством искусственного зрения.
Чтобы обеспечить представление деталей роботу с разных сторон, чтобы увеличить статистическую вероятность захвата деталей роботом, к вращению подвижного стола 4 вокруг оси 6 вращения добавляется колебательное движение также вокруг оси 6 вращения.
Таким способом можно изменить положение деталей на подвижном столе 4 во время вращения и, как было указано, создать благоприятные условия для захвата их роботом.
Кольцевой буртик 23 устраняет риск падения деталей с подвижного стола 4 под действием центробежной силы, возникающей при вращении.
Для специальных деталей, например с очень скругленными характеристиками формы или для очень круглых деталей, которые можно захватывать роботом только за одну их часть, вращательно-колебательное движения подвижного стола 4 может быть недостаточно, чтобы предотвратить замедление такого способа.
В этом случае можно активировать средство 15 генерирования импульсов, которое в предлагаемом решении содержит ударный магнит 18 так, чтобы толкать одну или более деталь, чтобы после удара они меняли ориентацию в своем расположении.
Закрывающий элемент 24 устраняет риск выбрасывания деталей за пределы устройства 1.
Ударным магнитом 18 может управлять оператор через средство зрения, и его относительное положение относительно опорной рамы 2 можно менять, приводя в действие подвижный ползун 21.
Преимущественно, для предотвращения неправильной работы устройства 1 для каждой загрузки деталей и/или оборота подвижного стола 4, применяют итеративный цикл, состоящий из следующих этапов:
Сначала с помощью средства искусственного зрения делают фотографию части подвижного стола 4, находящуюся в секторе захвата и, затем, изображение, полученное на этом этапе, анализируют для идентификации подлежащих захвату деталей, которые присутствуют на той части подвижного стола 4, которая находится в секторе захвата, и определения, правильно ли такие детали ориентированы для их захвата.
Если будет определено, что подлежащие захвату детали ориентированы правильно, детали захватываются роботом, средством автоматизации и т.п.
Если будет определено, что количество подлежащих захвату деталей, ориентированных неправильно, меньше заранее определенной величины, подвижный стол 4 поворачивают до тех пор, пока ранее сфотографированная часть не будет расположена частично в секторе загрузки, чтобы загрузить новые детали на подвижный стол 4 из бункера и т.п.
Наконец, если будет определено, что количество подлежащих захвату деталей, ориентированных неправильно, превышает заранее определенную величину, подвижный стол 4 поворачивают до тех пор, пока ранее сфотографированная часть не будет расположена в секторе ориентирования деталей, чтобы изменить ориентацию деталей с помощью воздействия средства 15 генерирования импульсов точным и локализованным образом по прямой линии воздействия, которая по существу перпендикулярна подвижному столу 4.
Преимущественно на этапе анализа изображения сравнение неправильно ориентированных деталей с заранее определенной величиной выполняют путем сравнения отношения количества белых пикселей к количеству черных пикселей изображения, при этом пороговая величина задается пользователем, а полученное изображение является черно-белым.
Затем эти этапы итеративно повторяют, поворачивая подвижный стол 4, пока ранее сфотографированный участок вновь не будет расположен в секторе захвата деталей, чтобы повторить вышеописанные этапы.
На практике было обнаружено, что устройство для ориентирования деталей, в частности, для захвата роботами, средствами автоматизации и т.п., согласно настоящему изобретению, полностью достигает поставленную цель в том, что дает возможность менять положение подлежащих захвату деталей, чтобы статистически благоприятствовать захвату роботами, средствами автоматизации и т.п., и эффективно эвакуировать остатки масла и грязь, которые затрудняют идентификацию деталей.
В частности, наличие средства генерирования импульсов, которое вертикально толкает подвижный стол, на котором лежат подлежащие захвату детали, позволяет при желании изменить расположение деталей.
Кроме того, возможность перемещения вышеуказанного средства генерирования импульсов в радиальном направлении относительно центра подвижного стола позволяет использовать устройство по настоящему изобретению бля более широкой номенклатуры деталей, отличающихся друг от друга как материалом, так и геометрией.
Другое преимущество изобретения заключается в том, что система позволяет изменять положение и расположение каждой отдельной детали с минимальным перемешиванием деталей и, следовательно, позволяет использовать устройство питателе для роботов, средств автоматизации и т.п. для манипулирования деталями с чувствительными участками или деталями, изготовленными из особо хрупких материалов.
Кроме того, минимизации перемешивания снижает шумовой порог, тем самым улучшая условия труда на предприятии где используется такое устройство.
Другим преимуществом питателя для роботов по настоящему изобретению является то, что по меньшей мере описанный вариант дает больше пространства для средства зрения внутри устройства, тем самым облегчая очистку внутреннего пространства устройства и, тем самым, упрощая процесс очистки такого средства зрения.
И последнее по порядку, но не по важности, применение широко доступных материалов и простота механической конструкции также делают устройство питателя для роботов, средств автоматизации и т.п. по настоящему изобретению экономически конкурентоспособным.
В предлагаемое устройство для ориентирования деталей, в частности, для захвата роботами, средствами автоматизации и т.п., можно внести различные изменения, которые находятся в пределах объема прилагаемой формулы.
Кроме того, все детали могут быть заменены другими, технически эквивалентными элементами.
На практике применяемые материалы и возможные размеры и формы могут выбираться в соответствии с требованиями уровня техники.
Содержание заявки на патент Италии № AR2014А000058 (102014902314778) по которой испрашивается приоритет, включено в настоящее описание путем отсылки.
Ссылочные позиции в формуле изобретения являются лишь справочными и не ограничивают толкование каждого элемента, обозначенного такими позициями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс "Робот-швея" | 2024 |
|
RU2836073C1 |
| Система технического зрения робототехнического комплекса "Робот-швея" | 2024 |
|
RU2832590C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ДЕТАЛЕЙ С НАКОПЛЕНИЕМ ИХ В КАССЕТАХ | 2015 |
|
RU2604161C2 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| УСТАНОВКА ОРИЕНТИРОВАНИЯ КАССЕТНОГО БОЕПРИПАСА В ПРОЦЕССЕ ЕГО ОБЕЗВРЕЖИВАНИЯ | 2009 |
|
RU2406068C1 |
| СИСТЕМА ТРАНСПОРТИРОВКИ, ПРЕДНАЗНАЧЕННАЯ ДЛЯ УСТАНОВКИ ДЕТАЛИ В ТРЕБУЕМОЙ ОРИЕНТАЦИИ, И ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА, ПРЕДНАЗНАЧЕННОЕ ДЛЯ УКАЗАННОЙ СИСТЕМЫ ТРАНСПОРТИРОВКИ | 2012 |
|
RU2580441C2 |
| Устройство для ориентирования деталей | 1976 |
|
SU654389A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Автоматизированный комплекс для штамповки | 1987 |
|
SU1549649A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ ДРАГОЦЕННОГО КАМНЯ | 2012 |
|
RU2615615C2 |
Устройство (1) для ориентирования деталей содержит опорную раму (2), образующую опорную поверхность (3), на которую опирается с возможностью вращения подвижный стол (4), связанный с двигательным средством (5) для его вращения вокруг оси (6) вращения, перпендикулярной опорной поверхности (3). Имеется средство искусственного зрения для распознавания деталей, расположенных на подвижном столе (4), и средство (15) генерирования импульсов, соединенное с опорной рамой (2) и воздействующее на подвижный стол (4) точным и локализованным образом по прямой линии, перпендикулярной подвижному столу (4), для изменения ориентации этих деталей так, чтобы их можно было захватить роботами или средствами автоматизации. Устройство дополнительно содержит периметрическую канавку (22), образованную на опорной поверхности (3) так, что она расположена радиально снаружи от подвижного стола (4) для облегченного удаления маслянистых веществ или грязи, присутствующих на деталях и переносимых на подвижный стол (4) вследствие движения деталей посредством средства (15) генерирования импульсов. 2 н. и 7 з.п. ф-лы, 5 ил.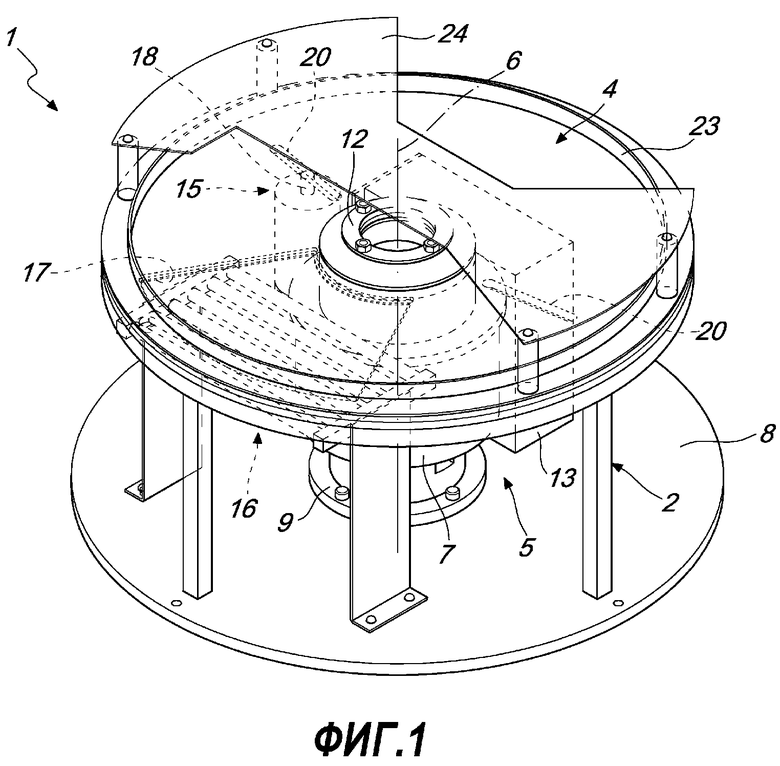
1. Устройство (1) для ориентирования деталей, в частности для захвата роботами, средствами автоматизации, содержащее опорную раму (2), образующую опорную поверхность (3), на которую опирается с возможностью вращения подвижный стол (4), связанный с двигательным средством (5) для его вращения вокруг оси (6) вращения, по существу перпендикулярной опорной поверхности (3), при этом дополнительно предусмотрены средство искусственного зрения для распознавания подлежащих захвату деталей, расположенных на подвижном столе (4), и средство (15) генерирования импульсов, соединенное с опорной рамой (2) и воздействующее на подвижный стол (4) точным и локализованным образом по прямой линии действия, по существу перпендикулярной подвижному столу (4), для изменения ориентации подлежащих захвату деталей для обеспечения возможности их захвата роботами, средствами автоматизации, отличающееся тем, что содержит периметрическую канавку (22), образованную на опорной поверхности (3) радиально снаружи относительно подвижного стола (4) для облегченного удаления маслянистых веществ или грязи, присутствующих на подлежащих захвату деталях и, как следствие, переносимых на подвижный стол (4) вследствие движения подлежащих захвату деталей посредством средства (15) генерирования импульсов.
2. Устройство по п. 1, отличающееся тем, что содержит средство (16) задней подсветки, связанное с опорной рамой (2) и расположенное с противоположной стороны от подвижного стола (4) относительно опорной поверхности (3) у средства искусственного зрения для задней подсветки подлежащих захвату деталей, расположенных на подвижном столе (4), с обеспечением возможности их идентификации средством искусственного зрения, при этом подвижный стол (4) выполнен из светопроницаемого и упругогибкого материала, а в опорной поверхности (3) выполнено окно (17), образованное у средства (16) задней подсветки с обеспечением задней подсветки подвижного стола (4).
3. Устройство по п. 1 или 2, отличающееся тем, что средство (15) генерирования импульсов содержит ударный магнит (18), соединенный с опорной рамой (2) и воздействующий на нижнюю поверхность (19) подвижного стола (4) через по меньшей мере одно отверстие (20), образованное в опорной поверхности (3), при этом указанное по меньшей мере одно отверстие (20) образовано на удалении от окна (17).
4. Устройство по одному или более из предшествующих пунктов, отличающееся тем, что средство (15) генерирования импульсов связано с опорной рамой (2) через подвижный ползун (21), выполненный с возможностью обеспечения движения ударного магнита (18) в радиальном направлении относительно оси (6) вращения, при этом указанное по меньшей мере одно отверстие (20) имеет форму паза, удлиненного в радиальном направлении относительно оси (6) вращения в соответствии с перемещением ударного магнита (18) посредством подвижного ползуна (21).
5. Устройство по одному или более из предшествующих пунктов, отличающееся тем, что подвижный стол (4) имеет по существу круглую форму, центр которой лежит на оси (6) вращения, причем окно (17) имеет форму по существу сектора круга.
6. Устройство по одному или более из предшествующих пунктов, отличающееся тем, что содержит закрывающий элемент (24), выполненный как одно целое с опорной рамой (2) и расположенный над подвижным столом (4) у средства (15) генерирования импульсов для вертикального удержания подлежащих захвату деталей в результате воздействия средства (15) генерирования импульсов.
7. Устройство по одному или более из предшествующих пунктов, отличающееся тем, что содержит по меньшей мере один сектор захвата деталей, образованный у средства искусственного зрения, по меньшей мере один сектор ориентирования деталей, образованный у средства (15) генерирования импульсов, и по меньшей мере один сектор для загрузки деталей с помощью бункера.
8. Способ захвата и загрузки для устройства (1) ориентирования деталей, в частности для захвата роботами, средствами автоматизации, по одному или более из предшествующих пунктов, отличающийся тем, что содержит этапы, на которых:
- фотографируют с помощью средства искусственного зрения часть подвижного стола (4), расположенную в указанном по меньшей мере одном секторе захвата деталей;
- анализируют изображение, созданное на предыдущем этапе для идентификации подлежащих захвату деталей, присутствующих на указанной части подвижного стола (4), расположенной в указанном по меньшей мере одном секторе захвата деталей, правильно ли они ориентированы для захвата или нет;
- в случае идентификации правильно ориентированных подлежащих захвату деталей захватывают подлежащие захвату детали роботом, средством автоматизации;
- в случае идентификации неправильно ориентированных подлежащих захвату деталей в количестве, которое меньше заранее определенной величины, поворачивают подвижный стол (4) до тех пор, пока ранее сфотографированная часть не будет расположена в указанном по меньшей мере одном секторе загрузки деталей для загрузки новых подлежащих захвату деталей на подвижный стол (4) с помощью бункера;
- в случае идентификации неправильно ориентированных подлежащих захвату деталей в количестве, которое больше заранее определенной величины, поворачивают подвижный стол (4) до тех пор, пока ранее сфотографированная часть не будет расположена в указанном по меньшей мере одном секторе ориентирования деталей для изменения их ориентации под действием средства (15) генерирования импульсов точным и локализованным образом по прямой линии воздействия, по существу перпендикулярной подвижному столу (4);
- поворачивают подвижный стол (4) до тех пор, пока ранее сфотографированная часть вновь не будет расположена в указанном по меньшей мере одном секторе захвата деталей для повторения предшествующих этапов.
9. Способ по п. 8, отличающийся тем, что на этапе анализа изображения сравнение количества неправильно ориентированных подлежащих захвату деталей с заранее определенной величиной осуществляют путем сравнения отношения количества белых пикселей к количеству черных пикселей с пороговой величиной, заданной пользователем, при этом изображение является черно-белым.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |

