ОБЛАСТЬ ТЕХНИКИ
Заявленное изобретение относится к автоматизированным системам швейного производства, а именно к компонентам швейного робототехнического комплекса, а именно к системе технического зрения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известна является система визуального позиционирования и автоматического шитья (см. CN109355812A, опубл. 19.02.2019) (1), который содержит модуль получения изображений для получения изображений вышитых образцов, подлежащих шитью, модуль обработки данных для получения полученных изображений вышитых образцов, выполнения обработки изображений для получения путей шитья, расчета координат для шитья в соответствии с к путям шитья и преобразованию путей шитья и координатных позиций для шитья в заранее отформатированные файлы для отправки, швейный модуль для приема файлов предварительно заданного формата и завершения шитья вышитых образцов в соответствии с путями шитья и координатными позициями для вшивания предварительно отформатированные файлы.
Наиболее близким аналогом заявленного устройства по мнению заявителя является система перекрытия изделий с использованием компьютерного зрения (см. KR102629757B1, опубл. 29.01.2024) (2), которая использует эталонные изображения при пошиве деталей одежды, включает в себя контрольный стол, на котором размещаются два или более сшитых изделия одинаковой формы и размера; Робот для захвата швейного материала, установленный на испытательном столе или вне испытательного стола и снабженный на конце захватом для захвата швейного материала (Obj2). В систему также включена камера, установленная на роботе захвата швейного материала, для фотографирования верхней поверхности контрольного стола и двух или более швейных материалов (Obj1, Obj2), размещенных на верхней поверхности контрольного стола; блок вычисления положения внутри изображения для каждого швейного материала, который обрабатывает изображение, снятое камерой, для расчета координат центра и углов поворота двух или более швейных материалов (Obj1, Obj2), включенных в изображение; блок установки эталонного швейного материала, который устанавливает один из швейных материалов (Obj1, Obj2) в качестве эталонного швейного материала (Obj1), чтобы переместить захват робот, захватывающего швейный материал, на швейный материал (Obj2), отличный от эталонного швейного материала (Obj1), швейный материал (Obj2), к которому должен перемещаться захват и первый блок вычисления значения коррекции положения робота, который вычисляет разность координат положения и разность углов поворота между ними. Регулируя положение захвата с помощью разности координат положения и разницы углов поворота, вычисленных первым блоком вычисления значения коррекции положения робота, захват используется для регулировки положения захвата в соответствии с швейным материалом, отличным от эталонного. швейный материал Obj1 регулируют положение захвата с помощью разности координат положения и разницы углов поворота, вычисленных вторым блоком вычисления значения коррекции положения робота, для сравнения швейного материала Obj2, удерживаемого захватом, и эталонного.
Наиболее близкий аналог предложенный в (2) имеет ряд недостатков, поскольку система слишком сложна в исполнении, управлении и использовании.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Техническим результатом изобретения является создание простой в реализации, управлении и обслуживании системы технического зрения робототехнического комплекса "Робот-швея".
Технический результат достигается посредством создания системы технического зрения робототехнического комплекса "Робот-швея", содержащей установленную на столе робототехнического комплекса на Г-образной стойке с возможностью перемещения за счёт изменения положения стойки камеру технического зрения и светильник подсветки, размещенный на верней части стола с возможностью выдвижения, при этом система технического зрения соединена с элементами управления к коллаборативного робота, которые соединены с механизмом забора из стопки и оверлоком.
В предпочтительном варианте выполнения Г-образная стойка состоит из вертикальной и консольной балок, соединенных подкосом, в верхней части установлена поперечина с держателем камеры технического зрения.
В предпочтительном варианте выполнения Г-образная стойка кронштейны крепления камеры выполнены с возможностью регулировки положения и направления.
В предпочтительном варианте выполнения Г-образная стойка элементы управления коллаборативного робота включают контроллер коллаборативного робота, коммутатор, мини ПК.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежом, на котором:
Фиг. 1 - общий вид системы технического зрения робототехнического комплекса "Робот-швея";
Фиг. 2 - общий вид светильника подсветки контура робототехнического комплекса "Робот-швея";
Фиг. 3 - схема системы технического зрения робототехнического комплекса "Робот-швея".
Позиции на фиг. 1 обозначают следующее:
1 - вертикальная балка;
2 - консольная балка;
3 - подкос;
4 - поперечина;
5 - камера RGB;
6 - коллаборативный робот;
7 - контроллер коллаборативного робота;
8 - шкаф силового управления;
9 - коммутатор;
10 - мини ПК;
11 - клавиатура, мышь;
12 - монитор;
13 - оверлок;
14 - механизм забора из стопки ;
15 - подсветка из-под стола и датчик наличия ткани.
Эти чертежи не охватывают и, кроме того, не ограничивают весь объем вариантов реализации данного технического решения, а представляют собой только иллюстративный материал частного случая его реализации.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленная система технического зрения является частью робототехнического комплекса «Робот-швея» (далее - РТК), предназначенного для автоматизации обработки (обмётывания) срезов текстильных материалов при изготовлении швейных изделий.
РТК содержит стол, на котором размещены механизм забора из стопки (14), коллаборативный робот (6), оверлок (13). РТК снабжен системой технического зрения, размещенной на стойке (1), которая крепится к столу, светильником подсветки для освещения нижней поверхности детали (15), сменным прижимом, присоединяемым к коллаборативному роботу и системой управления, шкафом силового энергоснабжения и шкафом управления .
РТК производит забор детали из стопки, определение контура системой технического зрения (СТЗ), подачу детали роботом к рабочему органу оверлока, обработку края и перемещение изделия на следующие операции. Цикл обметывания состоит и следующей последовательности операций:
1) Оператор укладывает стопку деталей приемную зону;
2) Оператор с помощью кнопочного поста запускает РТК в атоматическом режиме. Деталь с помощью механизма забора из стопки перемещается в зону сканирования СТЗ;
3) В зоне сканирования детали. Производится сканирование и распознавание контура системой технического зрения (СТЗ);
4) Робот осуществляет прижим детали с учетом ее ориентации;
5) Далее робот производит перемещение детали в рабочую зону оверлока;
6) Оверлок обметывает деталь по необходимому контуру, срезая излишки ткани;
7) Готовая деталь перемещается роботом с помощью прижима на следующий стол на дальнейшие операции.
Система технического зрения обеспечивает обнаружение, автоматический контроль и анализ расположения объектов (деталей) в зоне сканирования. Внешний вид системы показан на фиг. 1.
Система выполнена на комбинированной основе и представляет из себя Г-образную стойку, состоящую из вертикальной (1) и консольной (2) балок, соединенных подкосом (3), в верхней части установлена поперечина (4) с держателем RGB-камеры (5). Кронштейны крепления камеры предусматривают возможность регулировки положения и направления.
Светильник подсветки контура служит для освещения нижней поверхности детали и обеспечения контраста контура для работы системы технического зрения. Светильник стоит из корпуса, внутри которого проложены управляемые светодиодные ленты. Предусмотрена регулировка яркости света. Светильник устанавливается в верхней части стола и мажет выдвигаться для обслуживания. Внешний вид светильника показан на фиг. 2.
Система технического зрения соединена с элементами управления коллаборативного робота (6), которые соединены с механизмом забора из стопки (14) и оверлоком (13).
Элементы управления коллаборативного робота включают контроллер коллаборативного робота (7), коммутатор (9), мини ПК (10), снабженные клавиатурой, мышью (11), монитором (12). Питание регулируется шкафом силового управления (8).
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
Предложенная система технического зрения робототехнического комплекса "Робот-швея" предназначена для применения в швейном производстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс "Робот-швея" | 2024 |
|
RU2836073C1 |
| Механизм забора из стопки робототехнического комплекса "Робот-швея" | 2024 |
|
RU2832763C1 |
| СПОСОБ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ БАНКНОТ, И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ, БАНКНОТ | 2020 |
|
RU2737603C1 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ УЧАСТОК ПЕРЕСЧЕТА ДЕНЕЖНОЙ НАЛИЧНОСТИ | 2018 |
|
RU2697316C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ СВАРКИ ЛИСТОШТАМПОВОЧНЫХ ЭЛЕМЕНТОВ КУЗОВА АВТОМОБИЛЯ | 1999 |
|
RU2164201C2 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| СПОСОБ ПАРАЛЛЕЛЬНОЙ РАСПРЕДЕЛЁННОЙ РАБОТЫ ГРУППЫ РОБОТОТЕХНИЧЕСКИХ КОМПЛЕКСОВ ПРИ РЕШЕНИИ ЗАДАЧИ РАСПОЗНАВАНИЯ МНОЖЕСТВА ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2024 |
|
RU2828320C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ СВАРКИ ПОДСБОРОК КУЗОВА АВТОМОБИЛЯ | 2002 |
|
RU2221683C1 |
| ШВЕЙНЫЙ РОБОТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1999 |
|
RU2154701C1 |

Заявленное изобретение относится к автоматизированным системам швейного производства, а именно к системе технического зрения робототехнического комплекса "Робот-швея" обработки срезов швейных изделий, содержащей камеру технического зрения, установленную на столе робототехнического комплекса на Г-образной стойке с возможностью перемещения за счёт изменения положения стойки, при этом камера технического зрения осуществляет обнаружение, автоматический контроль и анализ расположения деталей в зоне сканирования, и светильник подсветки контура нижней поверхности деталей, размещенный на верхней части стола с возможностью выдвижения, при этом система технического зрения соединена с элементами управления, присоединенными к коллаборативному роботу и соединенными с механизмом забора из стопки, и оверлоком. 3 з.п. ф-лы, 3 ил.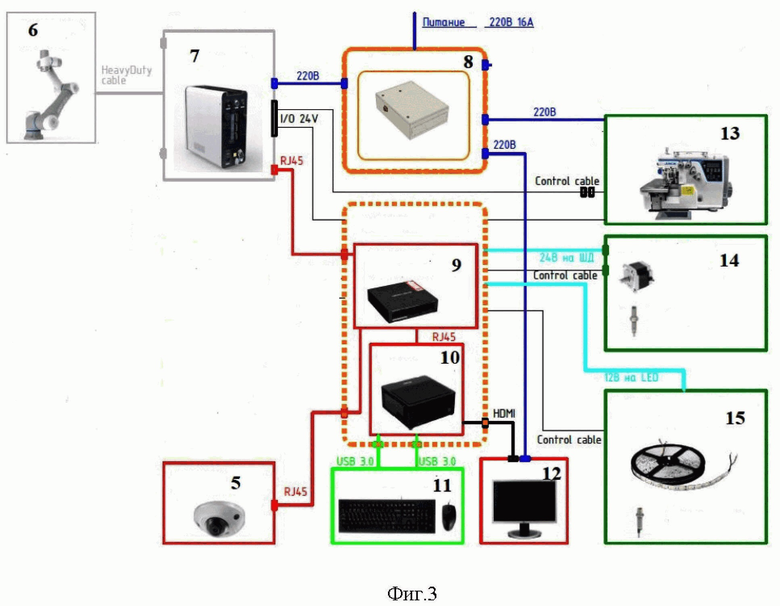
1. Система технического зрения робототехнического комплекса «Робот-швея» обработки срезов швейных изделий, содержащая камеру технического зрения, установленную на столе робототехнического комплекса на Г-образной стойке с возможностью перемещения за счёт изменения положения стойки, при этом камера технического зрения осуществляет обнаружение, автоматический контроль и анализ расположения деталей в зоне сканирования, и светильник подсветки контура нижней поверхности деталей, размещенный на верхней части стола с возможностью выдвижения, при этом система технического зрения соединена с элементами управления, присоединенными к коллаборативному роботу и соединенными с механизмом забора из стопки, и оверлоком.
2. Система технического зрения по п.1, отличающаяся тем, что Г-образная стойка состоит из вертикальной и консольной балок, соединенных подкосом, в верхней части установлена поперечина с держателем камеры технического зрения.
3. Система технического зрения по п.2, отличающаяся тем, что держатель камеры технического зрения выполнен в виде кронштейна крепления с возможностью регулировки положения и направления камеры технического зрения.
4. Система технического зрения по п.1, отличающаяся тем, что элементы управления коллаборативного робота включают контроллер коллаборативного робота, коммутатор, мини-ПК.
| CN 116079734 A, 09.05.2023 | |||
| ШВЕЙНАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА | 2007 |
|
RU2347025C2 |
| WO 2023116129 A1, 29.06.2023 | |||
| EP 3847617 A1, 14.07.2021 | |||
| US 20190389069 A1, 26.12.2019 | |||
| KR 20230134704 A, 22.09.2023 | |||
| CN 117021121 A, 10.11.2023. | |||

