Изобретение относится к области машиностроения и может быть использовано в конструкциях газотурбинных двигателей и паровых турбин.
Известно бесконтактное пальчиковое уплотнение с активным управлением зазором, содержащее корпус, выполненный в виде двух корпусных дисков, скрепленных вместе заклепками, в котором установлены подвижные элементы, выполненные в кольцевых пластинах с помощью прорезей, пьезоактуаторы, подключенные к источнику питания, связанному с управляющим контроллером, соединенным с датчиком перемещения (патент РФ №2655450, МПК F16J 15/447, опубликовано 28.05.2018 г.).
Недостатком данной конструкции является необходимость применения большого количества пьезоактуаторов (по одному на каждую подвижную площадку), что ведет к существенному усложнению информационно - измерительной системы, а также повышенная циклическая усталость подвижных элементов уплотнения в результате их радиальных деформаций.
Техническая задача, которую решает данное изобретение, - улучшение расходных и прочностных характеристик подвижных площадок уплотнения за счет изменения геометрической формы уплотнения и уменьшения количества пьезоактуаторов для управления зазором.
Поставленная задача достигается тем, что бесконтактное конусно-лепестковое уплотнение с активным управлением зазором содержит корпус, в котором установлены подвижные элементы, выполненные с помощью прорезей, пьезоактуаторы подключенные к источнику питания, связанному с управляющим контроллером, соединенным с датчиком перемещения. Согласно изобретению подвижные элементы выполнены с помощью прорезей во втулке, имеющей внутреннюю цилиндрическую и наружную коническую, переходящую в цилиндрическую, поверхности, при этом втулка установлена в корпусе с возможностью перемещения под действием пьезоактуаторов.
Технический результат заключается в уменьшении объема утечек газа, уменьшении количества пьезоактуаторов и повышении ресурса бесконтактного конусно-лепесткового уплотнения за счет исключения колебаний упругих лепестков, что позволяет устранить явление циклической усталости и повысить эффективность работы уплотнения.
Сущность изобретения поясняется чертежами.
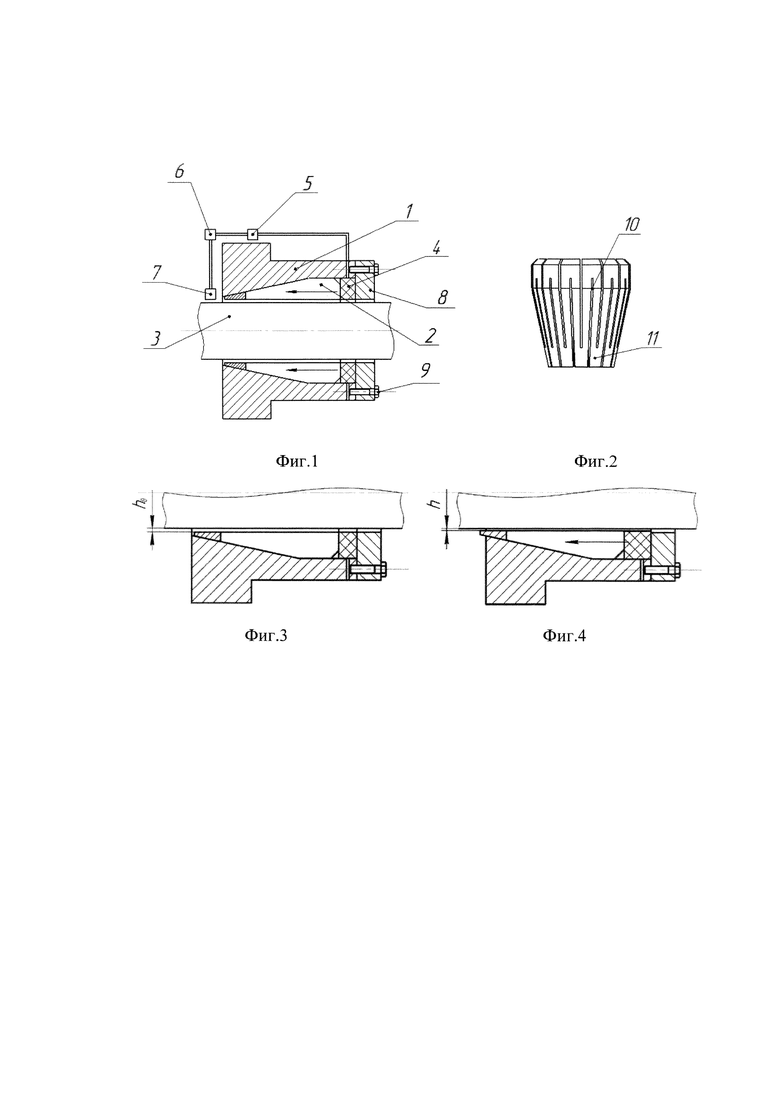
На фиг. 1 изображено бесконтактное конусно-лепестковое уплотнение (продольный разрез); на фиг. 2 изображена втулка; на фиг. 3 изображен продольный разрез бесконтактного конусно-лепесткового уплотнения при выключенном пьезоактуаторе; на фиг. 4 изображен продольный разрез бесконтактного конусно-лепесткового уплотнения при включенном пьезоактуаторе.
Бесконтактное конусно-лепестковое уплотнение (фиг. 1) содержит корпус 1, внутренняя поверхность которого образована конической, переходящей в цилиндрическую поверхностью, втулку 2, имеющую внутреннюю цилиндрическую, поверхность, охватывающую вал 3, и наружную коническую, переходящую в цилиндрическую поверхность. Втулка 2 установлена в корпусе 1 с возможностью перемещения вдоль оси вала 3. Пьезоактуаторы 4 подключены к регулируемому источнику 5 питания, который связан с управляющим контроллером 6 соединенным с датчиком 7 перемещения вала 3. Пьезоактуаторы 4 с одной стороны зафиксированы в корпусе 1 крышкой 8 посредством винтов 9, а с другой стороны пьезоактуаторы 4 контактируют с втулкой 2.
Втулка 2 (фиг. 2) имеет прорези 10 в осевом направлении, расположенные в шахматном порядке, нарезанные равномерно по всей втулке 2, образуя подвижные элементы в виде лепестков 11.
Устройство работает следующим образом.
Контроллер 6 получает от датчика 7 перемещения данные о положении вала 3, на основании которых контроллер 6 определяет вид движения вала 3. Рабочим видом движения является устойчивое движение вала 3. Неблагоприятным видом движения вала 3 является неустойчивое движение, которое может привести к повышенной вибронагрузке, к увеличению потерь на трение и выходу из строя роторной машины. В случае возникновения неустойчивого движения вала 3, контролер 6 подает управляющие сигналы на источник 5 питания, который увеличивает напряжение до определенного значения. Согласно явлению обратного пьезоэлектрического эффекта, линейные размеры пьезоатуаторов 4 при этом увеличиваются. Данное изменение пропорционально напряжению на источнике 5 питания. Под действием пьезоактуаторов 4 втулка 3 перемещается в осевом направлении по принципу клиновой передачи. В процессе движения происходит деформация подвижных лепестков 11, что приводит к возникновению упругих сил деформации и уменьшению радиального зазора между внутренней поверхностью втулки 2 и валом 3. Осевое перемещение втулки 2 происходит до того момента, пока сила, генерируемая пьезоактуаторами 4 в осевом направлении, не скомпенсируется силой упругих деформаций во втулке 2, действующей в том же направлении. При этом происходит уменьшение радиального зазора между втулкой 2 и валом 3 от величины h0 до h (фиг. 3 и 4). В случае, если контроллер 6 фиксирует устойчивое движение вала 3, выше описанные процессы происходят в обратном порядке.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНОЕ ПАЛЬЧИКОВОЕ УПЛОТНЕНИЕ С АКТИВНЫМ УПРАВЛЕНИЕМ ЗАЗОРОМ | 2017 |
|
RU2655450C1 |
| МНОГОЛЕПЕСТКОВЫЙ МЕХАТРОННЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК | 2019 |
|
RU2708413C1 |
| ЛЕПЕСТКОВЫЙ МЕХАТРОННЫЙ ГАЗОДИНАМИЧЕСКИЙ ПОДШИПНИК | 2019 |
|
RU2708409C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ | 2016 |
|
RU2651643C1 |
| Управляемый газомагнитный подшипниковый узел | 2017 |
|
RU2677387C1 |
| СПОСОБ УПРАВЛЕНИЯ РАДИАЛЬНО-ОСЕВЫМИ ДВИЖЕНИЯМИ РОТОРА | 2022 |
|
RU2792850C1 |
| УСТАНОВКА ДЛЯ ИССЛЕДОВАНИЯ РОТОРНЫХ СИСТЕМ С АКТИВНЫМ УПРАВЛЕНИЕМ | 2019 |
|
RU2734066C1 |
| ГИБРИДНЫЙ ПОДШИПНИКОВЫЙ УЗЕЛ С ИНТЕЛЛЕКТУАЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2821860C1 |
| АКТИВНАЯ ГИДРОСТАТИЧЕСКАЯ ОПОРА С РЕГУЛИРУЕМЫМ ДАВЛЕНИЕМ ПОДАЧИ СМАЗОЧНОГО МАТЕРИАЛА | 2016 |
|
RU2648550C2 |
| Активный упорный гидро/аэростатодинамический подшипниковый узел и способ управления его характеристиками | 2019 |
|
RU2714278C1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях газотурбинных двигателей и паровых турбин. Техническая задача, которую решает данное изобретение, - улучшение расходных и прочностных характеристик подвижных площадок уплотнения за счет изменения геометрической формы уплотнения и уменьшения количества пьезоактуаторов для управления зазором. Сущность предлагаемого изобретения: бесконтактное конусно-лепестковое уплотнение с активным управлением зазором содержит корпус, в котором установлены подвижные элементы, выполненные с помощью прорезей, пьезоактуаторы подключенные к источнику питания, связанному с управляющим контроллером, соединенным с датчиком перемещения. Согласно изобретению подвижные элементы выполнены с помощью прорезей во втулке, имеющей внутреннюю цилиндрическую и наружную коническую, переходящую в цилиндрическую, поверхности, при этом втулка установлена в корпусе с возможностью перемещения под действием пьезоактуаторов. Технический результат заключается в уменьшении объема утечек газа, уменьшении количества пьезоактуаторов и повышении ресурса бесконтактного конусно-лепесткового уплотнения за счет исключения колебаний упругих лепестков, что позволяет устранить явление циклической усталости и повысить эффективность работы уплотнения. 4 ил.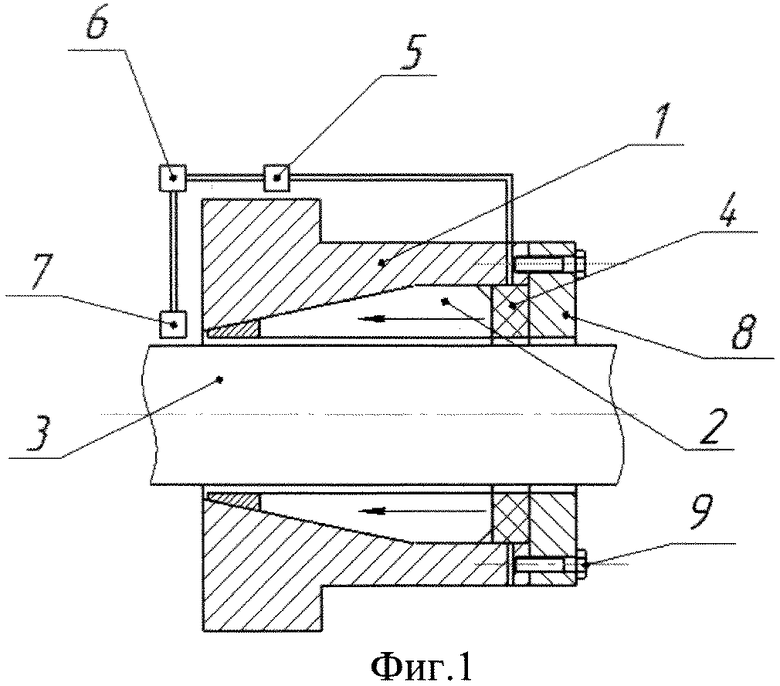
Бесконтактное конусно-лепестковое уплотнение с активным управлением зазором, содержащее корпус, в котором установлены подвижные элементы, выполненные с помощью прорезей, пьезоактуаторы, подключенные к источнику питания, связанному с управляющим контроллером, соединенным с датчиком перемещения, отличающееся тем, что подвижные элементы выполнены с помощью прорезей во втулке, имеющей внутреннюю цилиндрическую и наружную коническую, переходящую в цилиндрическую, поверхности, при этом втулка установлена в корпусе с возможностью перемещения под действием пьезоактуаторов.
| БЕСКОНТАКТНОЕ ПАЛЬЧИКОВОЕ УПЛОТНЕНИЕ С АКТИВНЫМ УПРАВЛЕНИЕМ ЗАЗОРОМ | 2017 |
|
RU2655450C1 |
| ТОРЦЕВОЕ БЕСКОНТАКТНОЕ УПЛОТНЕНИЕ (ВАРИАНТЫ) | 2000 |
|
RU2177572C2 |
| РОТОРНАЯ МАШИНА С ВНУТРЕННИМ ЗАЦЕПЛЕНИЕМ | 2005 |
|
RU2294436C1 |
| DE 4303050 A1, 02.09.1993. | |||

