Изобретение относится к геофизическим исследованиям и может быть использовано для нахождения небольших аномалий силы тяжести при морских измерениях.
Известны способ детализации измеряемого гравитационного поля за счет прохождении объектом одной точки несколько раз [1]. Недостатком такого способа является низкая производительность измерений.
Для увеличения производительности вводят дополнительные движения гравиметров [2]. Недостатком такого способа является необходимость прокладки внутрикорабельных путей для перемещения гравиметров.
Известен способ морских измерений при движении параллельными галсами [3]. Недостатком этого способа является низкая производительность, вызванная использованием относительного гравиметра с сильно демпфированной механической системой.
Задачей изобретения является повышение производительности и детализации измерений гравитационного поля и точности навигации по нему.
Это достигается тем, что используют два абсолютных гравиметра, размещенных на корабле так, что расстояние между ними в направлении нос-корма известно. Рядом с ними устанавливают горизонтальные акселерометры. На корабле размещены вычислитель и инерциальная навигационная система (ИНС) для определения линейной скорости и углов качки. На основании показаний ИНС и горизонтальных акселерометров по вторым гармоникам частот колебаний рассчитывают поступательные ускорения угловой качки в точках установки гравиметров. Вычитают вертикальные составляющие этих ускорений из показаний гравиметров. По линейной скорости, вырабатываемой ИНС, определяют время прохождения кораблем расстояния равного расстоянию между гравиметрами, и по нему рассчитывают разность фаз колебаний орбитального движения, образующуюся при прохождении гравитационной аномалии двумя гравиметрами последовательно. Рассчитывают сумму и разность сигналов, полученных после вычитания поступательных ускорений угловой качки. В разностном сигнале отсутствует гравитационная составляющая. По нему и по разности фаз определяют параметры орбитального движения, ускорения которого вычитают из суммарного сигнала и получают мгновенные значения величины ускорения силы тяжести (УСТ), которые усредняют.
Технический результат - повышение точности измерений силы тяжести на подвижном объекте.
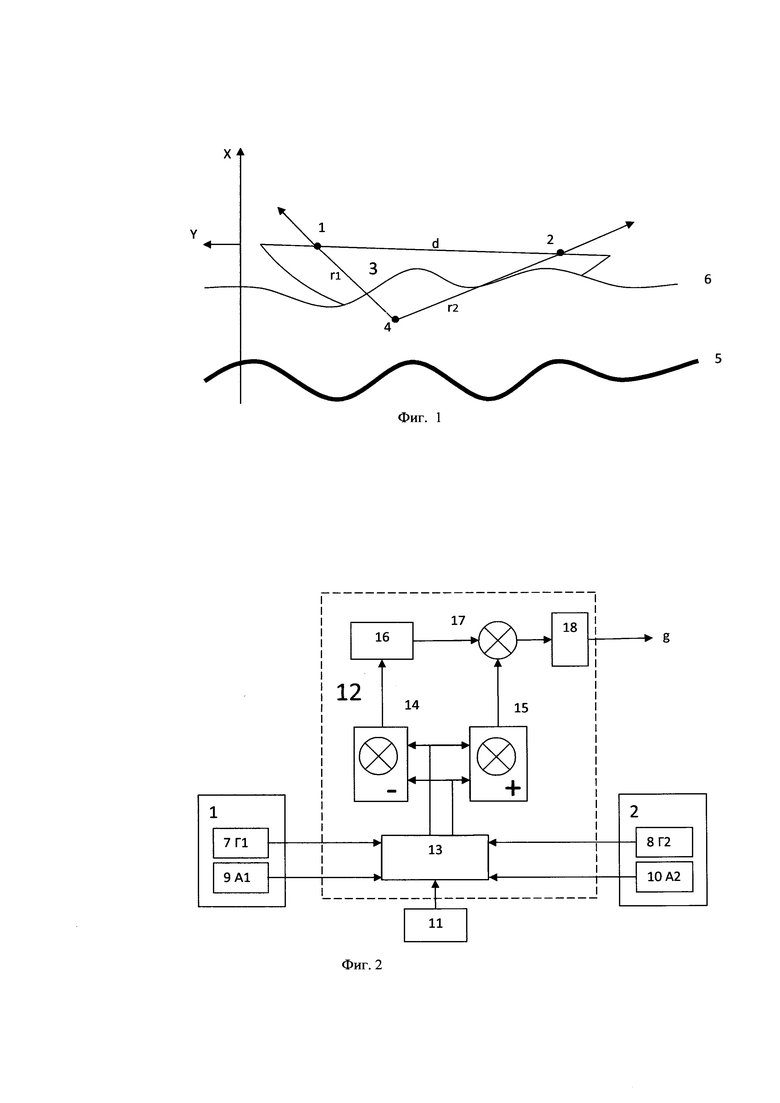
Сущность способа поясняется Фиг. 1 и Фиг. 2.
На Фиг. 1 приняты следующие обозначения:
1, 2 - точки установки гравиметров и акселерометров,
3 - объект - корабль,
4 - метацентр качки корабля,
5 - профиль гравитационного поля,
6 - профиль волнения моря,
X, Y - координатные оси,
r1, r2 - расстояние от метацентра качки до точек установки гравиметров,
d - расстояние между точками установки гравиметров.
На Фиг. 2 приняты следующие обозначения:
7, 8 - гравиметры,
9, 10 - акселерометры,
11 - инерциальная система (ИНС),
12 - вычислитель,
13 - блок вычисления и вычитания вертикальных поступательных ускорений угловой качки,
14, 15 - блоки вычисления разностного и суммарного сигналов,
16 - блок вычисления величины ускорения орбитального движения,
17 - устройство сравнения,
18 - сглаживающее устройство,
g - ускорение силы тяжести.
В точках 1 и 2 на корабле 3 оборудованы посты для установки аппаратуры. При движении корабль качается относительно метацентра 4 и совершает орбитальное движение. Вертикальные ускорения, действующие вдоль оси X, содержат ускорение силы тяжести, зависящее от гравитационного профиля 5, и инерционное ускорение, зависящее от профиля волнения моря 6. На постах размещены гравиметры 7, 8 и акселерометры с горизонтальными осями чувствительности 9, 10. На корабле также установлена инерциальная система ИНС 11. Гравиметры, акселерометры и ИНС соединены с вычислителем 12, конкретно с блоком 13 вычисления и вычитания вертикальных поступательных ускорений, вызванных угловой качкой корабля. Блок 13 соединен с блоками 14 и 15, в которых вычисляют разность и сумму ускорений, полученных после вычитания поступательных ускорений угловой качки. Блок 14 соединен с блоком 16, в котором вычисляют ускорения орбитального движения корабля. Выходы блоков 16 и 14 соединены с входами устройства сравнения 17, где вырабатывают мгновенные значения ускорений силы тяжести. Полученные ускорения пропускают через сглаживающее устройство 18, которое формирует истинную величину силы тяжести g.
Известны относительные гравиметры [3, 4]. Механическая часть этих гравиметров представляет собой поплавок в вязкой жидкости, с точки зрения теории автоматического регулирования - апериодическое звено первого порядка с постоянной времени порядка Т≈1000 с. Такое звено имеет наклон  и при указанной постоянной времени обеспечивает коэффициент ксгл=105 при отстоянии частоты сигнала от частоты среза на 2,5 декады. В этом случае ускорения качки и орбитального движения с периодом Tk=10 с и амплитудой
и при указанной постоянной времени обеспечивает коэффициент ксгл=105 при отстоянии частоты сигнала от частоты среза на 2,5 декады. В этом случае ускорения качки и орбитального движения с периодом Tk=10 с и амплитудой  успешно усредняются до допустимой величины
успешно усредняются до допустимой величины  Но в такой же мере сглаживается и профиль аномалий. Аномалии, изменяющиеся с частотой качки или меньшей, исчезают полностью [4]. Например, при скорости корабля
Но в такой же мере сглаживается и профиль аномалий. Аномалии, изменяющиеся с частотой качки или меньшей, исчезают полностью [4]. Например, при скорости корабля  не будут обнаружены аномалии длиной менее L=5 км. Для их идентификации необходимо снижать скорость измерений или многократно проходить над одной точкой.
не будут обнаружены аномалии длиной менее L=5 км. Для их идентификации необходимо снижать скорость измерений или многократно проходить над одной точкой.
В абсолютном гравиметре механическая часть - безынерционна. Примем длину волны видимого света ϒ=5*10-7 м. Чередование интерференционных полос соответствуют изменению пути на полуволну. Путь h, пройденный телом за время τ при падении под действием ускорения силы тяжести g, определяется формулой  а время падения
а время падения  Приращение времени Δτ, соответствующее изменению высоты Δh определится выражением
Приращение времени Δτ, соответствующее изменению высоты Δh определится выражением 
Если измерять путь количеством n длин полуволн h=2n ϒ, а приращение пути принять равной длине полуволны Δh=0,5 ϒ, получим
При несимметричном способе измерений максимальное приращение времени зафиксируется при прохождении первой полуволны
что соответствует частоте  Последующие измерения будут происходить на частотах, превышающих fmin>10 кГц.
Последующие измерения будут происходить на частотах, превышающих fmin>10 кГц.
Отсчеты, полученные на частоте превышающей 10 кГц усредняют за время полета пробного тела. Примем высоту падения тела h=5*10-3 м и время падения τ=0,03 с. В этом случае на траектории падения укладывается n=2,5*104 отсчетов. Можно принять погрешность каждого измерения [3] Δgj=100 Гал. При простом осреднении коэффициент сглаживания  недостаточен для достижения необходимой точности
недостаточен для достижения необходимой точности  Однако, выбирая тип и порядок фильтра, например, косинусное окно в фильтре с конечной импульсной характеристикой [5], у которого коэффициент сглаживания
Однако, выбирая тип и порядок фильтра, например, косинусное окно в фильтре с конечной импульсной характеристикой [5], у которого коэффициент сглаживания  добиваются необходимой степени сглаживания при заданном количестве измерений. Так как Т≈107 Δτmax, то детализация съемки гравитационного поля улучшиться на 7 порядков без уменьшения скорости корабля.
добиваются необходимой степени сглаживания при заданном количестве измерений. Так как Т≈107 Δτmax, то детализация съемки гравитационного поля улучшиться на 7 порядков без уменьшения скорости корабля.
На корабль помимо инерциальной система, которая измеряет линейную скорость и угловые параметры качки, устанавливают группу акселерометров для определения метацентра качки и поступательных ускорений качки. Рассмотрим ускорения в точках, расположенных в диаметральной плоскости. Полное вертикальное ускорение аполн содержит мгновенные значения гравитационной составляющей gj, ускорения орбитального движения  и поступательные ускорения качки aΨ
и поступательные ускорения качки aΨ

Поступательное ускорение качки состоит из двух частей: тангенциальной -  и радиальной -
и радиальной - 

Ускорения можно разделить и выделить гравитационную составляющую gj. Полное ускорение aполн измеряют гравиметром. Углы, скорости и угловые ускорения качки  измеряют инерциальной системой, ею же измеряют линейную скорость корабля Vk.
измеряют инерциальной системой, ею же измеряют линейную скорость корабля Vk.
Для оценочных расчетов примем качку гармонической.

где Ψm и ω - амплитуда и частота качки.
Выражения для ускорений имеют вид


где i - 1 и 2 - номер точки установки приборов.
Тангенциальные ускорения изменяются с частотой качки ω, а радиальные - состоят из постоянной составляющей и составляющей, изменяющейся с удвоенной частотой качки - 2ω.
Проекции поступательных ускорений на оси x и y имеют вид:

где αi - угол между горизонтальной плоскостью и направлением радиус-векторов, соединяющих метацентр качки и точки установки измерительных приборов.
В сигналах гравиметров и акселерометров выделяют проекции радиального ускорения на двойной частоте качки

При решении четырех уравнений с четырьмя неизвестными получим значения ri и αi. По ним рассчитаем тангенциальные ускорения  и
и  . Радиальные и тангенциальные ускорения исключим из полного ускорения. В результате получают остаточное ускорение
. Радиальные и тангенциальные ускорения исключим из полного ускорения. В результате получают остаточное ускорение

Для разделения g и  при измерениях одним гравиметром обычно корабль над одной аномалией проходит несколько раз. При установке двух гравиметров на одном корабле аномалия вызывает одинаковое изменение силы тяжести для гравиметров последовательно проходящих над ней, а орбитальное движение запаздывает по фазе.
при измерениях одним гравиметром обычно корабль над одной аномалией проходит несколько раз. При установке двух гравиметров на одном корабле аномалия вызывает одинаковое изменение силы тяжести для гравиметров последовательно проходящих над ней, а орбитальное движение запаздывает по фазе.
Сигнал первого гравиметра имеет вид:

где ϕ1 - фаза орбитального движения для первого гравиметра.
При прохождении той же точки вторым гравиметром сигнал приобретет вид

Запишем выражения разности  и суммы сигналов
и суммы сигналов 

где  - промежуток времени между прохождениями точек 1 и 2.
- промежуток времени между прохождениями точек 1 и 2.
Разностный сигнал представим в виде

Будем считать, что измерения идут непрерывно с частотой превышающей 10 кГц. По записи разностного сигнала найдем его амплитуду  как экстремальное значение при
как экстремальное значение при
Где m - номера прохождений сигналом экстремумов.

Вычислим аргумент и амплитуду орбитального движения
Вычислим величину сигнала орбитального движения в суммарном сигнале

и вычитаем еe из суммарного сигнала. В результате получим мгновенное значение величины ускорения силы тяжести

которое усредняем, например, с помощью фильтра с конечной импульсной характеристикой [5], имеющего передаточную функцию W(j)
g= gjW(j)
Технический эффект заключается в повышении производительности измерений гравитационного поля и точности навигации по нему.
Литература.
1. Блинов В.Н., Лопатенто Л.Е., Трушляков В.И., Бескоровайный И.В., Иванов Н.Н., Шалай В.В., Маркелов В.В. Способ измерения гравитационного поля Земли. Патент РФ 2251127. 29.12.2003 Владельцы патента: «Омский государственный технический университет», ЗАО КБ «Полет».
2. Ставров К.Г., Костенич А.В., Сувернев В.Е., Гусева В.И., Денисюк Е.А., Малышева В.Ф. Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте. Патент РФ 2479859. 2010-08-03. Патентообладатель «Государственный научно-исследовательский навигационно-гидрографический институт». (ОАО «ГНИНГИ»)
3. А.А. Краснов, А.В. Соколов, Л.С. Элинсон. Результаты многолетней эксплуатации гравиметров «Чекан-АМ». Новый аэроморской гравиметр серии «Чекан». Симпозиум международной ассоциации по геодезии (IAG). Наземная, морская и аэрогравиметрия: измерения на неподвижных и подвижных основаниях (TG - SMM 2013). Санкт-Петербург. 2013.
4. Л.К. Железняк, Е.И. Попов. Новая упругая система морского гравиметра. Гравиинерциальная аппаратура в геофизических исследованиях. М.: ИФЗ АН СССР, 1988, с. 92
5. Теория и практика ЦОС. Спектральный анализ на ограниченном интервале времени. Оконные функции, www.dsplib.ru
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс для измерения абсолютного значения ускорения силы тяжести на подвижном основании | 2019 |
|
RU2705926C1 |
| АВТОНОМНЫЙ ГРАВИТАЦИОННЫЙ ГРАДИЕНТОМЕТР | 2015 |
|
RU2578247C1 |
| Способ построения инерциальных демпфированных систем с произвольным периодом, инвариантных по отношению к маневрированию, и устройство для его осуществления | 2015 |
|
RU2616087C1 |
| СПОСОБ ИЗМЕРЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ АБСОЛЮТНОГО ЗНАЧЕНИЯ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ И ГРАВИМЕТРЫ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523108C1 |
| СПОСОБ КОРРЕКЦИИ КОМПЛЕКСНОЙ ИНС ПО АНОМАЛИИ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ | 1985 |
|
SU1840368A1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СПОСОБ ВЫСТАВКИ В ВЕРТИКАЛЬ ЛАЗЕРНОГО ЛУЧА БАЛЛИСТИЧЕСКОГО ГРАВИМЕТРА И ГРАВИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2522116C1 |
| СИСТЕМА КОРРЕКЦИИ ГИРОСТАБИЛИЗАТОРА МОРСКОГО ГРАВИМЕТРА | 2007 |
|
RU2332642C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2378616C1 |
Изобретение относится к геофизическим исследованиям и может быть использовано для нахождения небольших аномалий силы тяжести при морских измерениях. Технический эффект, заключающийся в повышении точности измерений силы тяжести на подвижном объекте, повышении производительности измерений гравитационного поля, а также в точности навигации по нему, достигается за счёт того, что два абсолютных гравиметра неподвижно устанавливают на объекте в точках с известным расстоянием между ними, в тех же точках устанавливают акселерометры с горизонтальными осями чувствительности, в сигналах гравиметров и акселерометров выделяют вторую гармонику колебаний качки объекта, по ней рассчитывают вертикальные составляющие поступательных ускорений качки, которые вычитают из сигналов гравиметров, полученные после вычитания поступательных ускорений угловой качки сигналы гравиметров складывают и вычитают, получая сигналы суммы и разности, по расстоянию между точками установки гравиметров и скорости движения объекта определяют необходимое для преодоления этого расстояния время и вычисляют возникший за это время сдвиг фазы орбитального движения, подставив сдвиг фаз в сигнал разности, рассчитывают параметры орбитального движения, вычитают сигнал ускорения орбитального движения из сигнала суммы и получают величину мгновенного ускорения силы тяжести, которую усредняют. 2 ил.
Способ измерения ускорения силы тяжести на подвижном объекте, заключающийся в размещении на объекте гравиметра, акселерометров, инерциальной системы и вычислителя, расчете и вычитании из показаний гравиметров поступательных ускорений качки и орбитального движения, отличающийся тем, что два абсолютных гравиметра неподвижно устанавливают на объекте в точках с известным расстоянием между ними, в тех же точках устанавливают акселерометры с горизонтальными осями чувствительности, в сигналах гравиметров и акселерометров выделяют вторую гармонику колебаний качки объекта, по ней рассчитывают вертикальные составляющие поступательных ускорений качки, которые вычитают из сигналов гравиметров, полученные после вычитания поступательных ускорений угловой качки сигналы гравиметров складывают и вычитают, получая сигналы суммы и разности, по расстоянию между точками установки гравиметров и скорости движения объекта определяют необходимое для преодоления этого расстояния время и вычисляют возникший за это время сдвиг фазы орбитального движения, подставив сдвиг фаз в сигнал разности, рассчитывают параметры орбитального движения, вычитают сигнал ускорения орбитального движения из сигнала суммы и получают величину мгновенного ускорения силы тяжести, которую усредняют.
| Способ определения ускорения силы тяжести на подвижном основании | 1981 |
|
SU1000983A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324207C1 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2479859C2 |
| CN 106168682 B, 05.04.2017. | |||

