(54) аПСХ;ОБ ОПРЕШЛЕНИЯ УСКОРЕНИЯ силы ТЯЖЕСТИ НА подвижном ОСНОВАНИИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения силы тяжести на подвижном основании | 1976 |
|
SU575597A1 |
| И. А. Маслов и И. И. Науменко-Бондаренко | 1968 |
|
SU219808A1 |
| Устройство для измерения силы тяжести | 1974 |
|
SU544926A1 |
| Способ абсолютных измерений гравитационного поля на подвижном объекте | 2019 |
|
RU2704545C1 |
| Способ измерения низкочастотных гравитационных сигналов | 1978 |
|
SU771593A1 |
| Гравиметр для измерения ускорения силы тяжести | 1978 |
|
SU775703A1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| Горизонтальный крутильный маятник | 1979 |
|
SU789965A1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Гравитационный вариометр | 1977 |
|
SU693325A1 |
Изобретение отнгюится к гравиметрии.
Известен способ измерения ускорения силы тяжести на подвижном основании с использованием горизонтальных сильнодемпфированных маятников ilX При этом показание маятника непрерывно регистрируются в, процессе измерения. Но так как амплитуда инерциальных ускорений в десятки тысяч раз превышает приращения ускорения силы тяжести, то, искточить их ъ шятше на показание маятника, приходится осреднять 10-15 минутные интервалы записи показаний прибора. Одновременно допускается, что на интервале осреднения зйачение ускорения силы тяжести не нэменяется. Следоваггельно, применение указанного способа позволяет находить лишь дискретные значения ускорения силы тяжести которые получаются осреднением измерений jaa учжгрках значительной протяженности. Такая детальность., является недостаточной для аномальных ЗОИ, а также для акваторий с шшмальными зонами, имеющими малую протяженность.
Известен способ измерения скоревия силы тяжести гравиметром, установленным на гиростабилиаированной платформе. Способ предусматривает непрерывное удеркание мештника гравиметра в нулевом положении путем подачи на него компенсирующего момента обратной связи 2.
10
Способ позволяет автоматизирс ать; npoiiecc измерения но при этом усложняет конструкцию прибора н не позволя ет полностью из&|ВН1ъся от некоторых , поправок. Кроме того, показания прибоISра также осредняюфся яа большом интервале.
Наиболее близким н предлагаемому является способ определения ускорения силы тяжести на подвижном основании.,
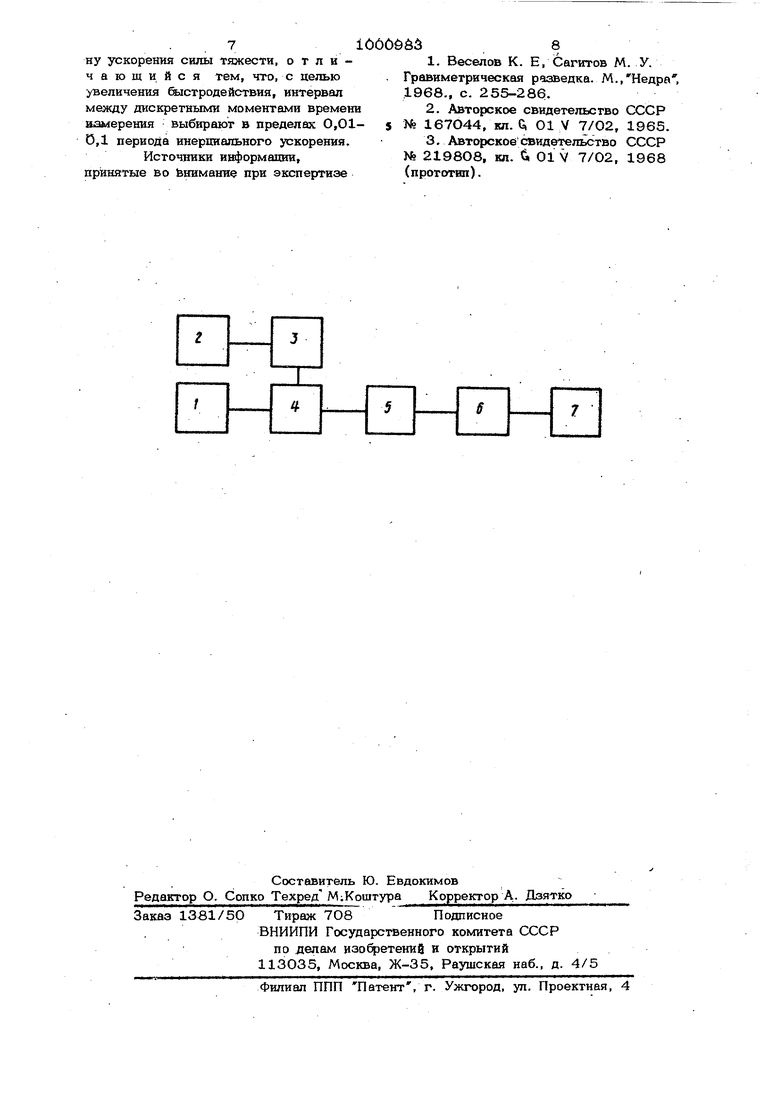
20 включающий измерение периода иверпиальных ускорений и положение вертикапьнсяо крутильного маятника и дискретные моменты времени, позволяющее по резуль3Ютатам измерений вьгшслять величину усхоренкя силы Г5ш:ести. Значение ускорения силы тяжести определяют в моменты совпадения показаний авук маятников, имеющих одинакову статическую и разную динамическую чувствительность Сз1 . Недостатками способа явянючся осреднение результатов измерения на инте вале времени порядка 3-5 мин, а на точ ность измерения оказывают влияние как переходные процессы, так и нелинейные явления. Известные способы предусматривают применение силыюдемфированных чувствительных систем, приводящих к значительным фазовым и амплитудным искажениям полезного сигнала. Кроме того, Ни в одном из известных способов щаг дискретизации по времени не устанавлнвается в зависимости от частоты инердиального ускорения. Цель изобретения -увеличение быстро . действия. Поставленная цель достигается тем, что в способе определения ускорения силы тяжести на подвижном основании, вютючающем измерение периода инерциальных ускорений иполо.жение вертикаль ного крутильного маятника в дискретные моменты времени, позволяющее по ре- зупьтатам измерений вычислять величину ускорения силы тяжести, интервал между дискретными моментами времени измерения выбирают в пределах 0,01 О,1 периода инерциально.го ускорения. Сущность способа заключается в следующем. Для определенности рассмотрим уравнение колебаний маятника чувствительной cHCTeivttJ гравиметра, устайовленого на гиростай лизированной платформе, таким образом, что остаточные углы наклона его основания близки к нулю, Ч (t)72 ДЧ()+ (t) С05 Ч(t/,: Iiilsin nt)co54- 0 () где 2. Д - коэффициент демпфировашга; - длина маятника; П и 0 - собстенная частота ипостоянный угол закручивания нити маятника; X(t)M2{,-t)-- горизонтальная и верт кальная проекции инерниально го 1скорения| 1 п, А и Q-- -величины заданные; f(t). - угол отклонения маятника. З4 Нелинейное дкфференияальное уравнение {1), содержащее неизвестные. функции j((t)HZCt) , в общем виде не интаприруется. Однако прибор, поведение которого описывается уравнением (1), можно |Ьассматривать как интегрирующее устройство, дающее на выходе V(t|c учетом воздействия функций X(t) и Z(tJ . В предлагаемом способе регистриру- ют дискретные значения () как. показания на .выходе чувствительной системы гравиметра. При этом региртрируемая совокупность значений (.), где i 0,1,2,tn, включает Ъ себя как предшествующие, так и последующие, относительно t-j значения Ч(Ь) .С другой стороны, значения производных (i) и ФО-) для конкретного момента времени i могут быть вычислены с необходимой. точностью по совокупности измеряемых значений (t,). Таким образом, если записать уравнение (1) для момента времени t-ц: l4)2A((i).f.(y. Ч) Ц) (y.(y.0, (2) то по изложенйь1м вьпие причинам его можно рассматривать как алгефаическое уравнение относительно лтиь следующего набора неизвестных величин ,(1(4). Будем теперь считать, что на достаточно маломч. интервале времени от -2cf-t . до t,j. компоненты инерпивльного ускорения .X(t) и Z U) допускают следующую форму записи: x(t)) T(.f(} , где XQ и 20 - неизвестные но постоянные амплитуды, причем )COSUJi и ,7(.-t)Sinuj-fc или f(i)-f2lt)-sinwt. Сформулированные условия при соответствующем выборе dH означают, что на достаточно малом интервале времени порядка 4«r-t предполагается постоянство амплитуды и частоты инерциального ускорения. Дополняя Уравнение (2) эквивалентными ему уравнениями на моменты времени и |,±-2tr%,a также используя соотношения (3), можно получить систему линейно независимых уравнений, которая дает/возможность исдотючить неизвестные величины Q и 2 . С другой стороны, эта система уравнений позволяет выразить искомое значение ( как функайю лишь совокупности регистрируемых значений 4(i),f (Ц± cT-t), 4( ZcTt) и мгновенной частоты W инерциального ускорения, соответствующей интервалу времени t.-2с,-t +ZcTt и измеряемой, например с использованием акселерометров. Более .того, система уравнений позволяет ..также найти взаимосвязь между W и.ч(t),(), что дает возможность определять мгновенную частоту независимо от авселерометрических измерений. Таким образомг суть изложенного способа определения ускорения силы тяжести на подвижном основании состоит в использовании мгн венной частоты инерциального ускорения, которая определяется либо посредством независимого инструментального измерения, либо с применением изложен ного здесь; метода. Аналогичным офазом, решая систему уравнений типа (2) для случая, когда X(i)H 2(t) по (3) включаютр не только частотные, но и фазовые характеристики инерциальногоускорения, можно получить выражения для ускорения силы тяжести, полностью учитывающее частотно-фазовые характе, ристики инерциального ускорения. Окончательное соотношение для определения о; можно записать в виде: V; f ЧЧ)М ).d4.u, где функции С и Gi - комбинации значений частогйо-фаэовых характеристик инерпиального ускорения и показаний маятника, снимаемых относительно моме та времени i и дискретно отстоящих от него других моментов времени(С| Ц) Для частного случая, когда f-|(t)- (-t)slnuJ-t, функция G-CFit lt и и (.tv.) имеют вид: ЧЧМЧ ---4V 4 1V WK xfblfrt )(t-{/i)l+Sinu) . j .. KSinu)(t )f )ПС(Ч) + Sinujt| StnU)-tj -d4|r t| +crtj xfto ffi -с/tl-ttrlf {t Я k 40 36 e,(lj)Stnu) crt))() ( x5.nu,(t./«t)tsjC/() i). ,(-c)((, причем ((t)( COS vet) На чертеже показана бпок-схема устройства для реализации способа. Устройство состоит из гравиметра 1, акселерометра 2, анализатора 3, датчика 4 угловых отклонений маятника, формирователя 5, вычислителя 6, регистратора 7. Реализация способа осуществляется следующим образом. Акселерометр 2 измеряет период Т инерциальных ускорений, затем анализатор 3 устанавливает оптимальный режим измерения положения маятника гравиметра 1, определяемый условием 0,01 4 «ft 4 ОД Т. С датчика 4 данные о положении маятника передаются в формирователь 5, где составляются суммы и разно-сти величинJt-j(+(ri,ij,-cri и т.д. В вычиспителе 6 по полученньш данным определяется значение с. Использование предлагаемого способа позволит определять усредненные значения ускорения силы тяжести на интервале времени, равном 3-5 периодам инерциального ускорения. Основная частота инерциальных ускорений на с в океане около Ю с. Слеаовательно, каждое усредненное значение будет определяться в среднем через 2О-5О с. В прототипе на эту операцию требуется 35 мин. т. е, процесс измерення ускорит-, ся в 5-10 раз. Это приводит не только к увеличе шю детальности и производительности работ, но и к уменьшению амплитудно-фазовых искажений полезного сигнала. Формула изобретения Способ определения ускорения силы тяжести на подвижном основании,, включакмций измерение периода инерциальных ускорений и положение бертикального-крутильного маятника в дискретные моменты времени, позволяющее по результатам измерений вычислять величину ускорения силы тяжести, отличающийся тем, что, с целью увеличения быстродействия, интервал между дискретными моментами времени намерения выбирают в пределах 0,010,1 периода инерниального ускорения.
Источники информации, пртанятые во Ьнимание при экспертизе
