ОБЛАСТЬ ТЕХНИКИ
Настоящая заявка относится к инструменту для обнаружения отверстий на трубопроводах транспортировки углеводородных продуктов, используя систему датчиков. Функция этого инструмента сводится к прохождению по длине трубы определенного диаметра, контролируя его толщину и обнаруживая любое отверстие, которая будет найдено по пути и, согласно полученным данным, определение расстояния, на котором были найдены отверстия, вычислением от начальной точки, время в момент обнаружения, и положение отверстия по окружности трубы и его размер, причем все вышеупомянутое устанавливается в онлайновом процессе по мере перемещения инструмента через целевой трубопровод. В конце выполнения процесса информация может быть загружена в компьютер, где она доступна для последующего использования и принятия соответствующего решения относительно целостности трубопровода. Инструмент перемещается в трубопроводе потоком транспортируемой среды, как это обычно делается при использовании скребков для очистки трубопроводов.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В современной технике существуют многочисленные инструментальные средства для очистки или физического разделения различных жидкостей, которые транспортируются по трубам; другой тип инструмента ориентирован на обслуживание и контроль внутренних и внешних условий транспортировки углеводородов или газов, который позволяют получать и записывать геометрическую информацию о трубе, такую как размер, положение и внутренние и внешние дефекты, среди прочих данных.
Среди инспекционных инструментальных средств есть онлайновые инспекционные инструментальные средства, которые перемещаются внутри трубы благодаря динамике жидкости, в которой они транспортируется, благодаря чему такие средства не мешают нормальному функционированию трубопровода при осуществлении цели инспекции трубы.
Интеллектуальные инструментальные средства используют различные способы инспекции. Эти способы, главным образом, имеют целью определение различных параметров трубы, используя рассеяние магнитного потока (MFL) и ультразвук (UT). Интеллектуальные инструментальные средства, особенно те, которые используют технологию MFL, являются наиболее распространенными и были разработаны в самых разных вариантах, так что существует большое количество патентов, относящихся к таким инструментам.
Среди документов, относящихся к этим типам инструментальных средств, можно отметить патент США 4.153.875, который относится к прибору для испытаний трубопроводов путем пропускания тока через металлические трубы, которые имеют, по меньшей мере, один местный изгиб. Устройство работает благодаря перемещению зонда в трубах. Указанный зонд имеет обмотки, которые служат как излучатель-приемник, и оборудован электрическим кабелем, который соединяет проводники с зондом, и механически связан с зондом, чтобы обеспечить поступательное движение, которое начинается с заднего конца трубы, и этот зонд связан с системой мониторинга трубы, которая находится за пределами трубы. Это устройство имеет различные узлы для считывания данных о параметрах трубы и для их хранения. Однако инструмент, описанный в этом патенте, не обеспечивает зонду легкую маневренность внутри трубы, учитывая, что он не имеет гомокинетических соединений, и информация, принятая датчиками, управляется только через электронные средства.
Кроме того, имеется патент США 5.864.232, который описывает интеллектуальный инструмент, используемый для анализа аномалий, которые могут быть найдены на стенках трубы. Этот инструмент представляет собой цилиндрический корпус, которое включает подающий узел, модуль хранения данных, средства формирования и передачи магнитного поля; средство считывания утечки магнитного потока, вызванные аномалиями на такой трубе, и множество колес, соединенных с корпусом инструмента, которые позволяют устройству скользить по стенкам трубы. Кроме того, инструмент, описанный в этом документе, имеет несколько колес, служащих только для смещения, и среду, которая перемещает инструмент через трубу, что не рекомендуется, поскольку имеет место большое потребление энергии из-за узла привода, который перемещает инструмент через трубу.
Кроме того, имеется патент США 6.023,986, который относится к системе локализации дефектов трубы, и который содержит внутреннюю навигационную систему (INS) и систему глобального позиционирования (GPS). В частности этот патент относится к способу инспекции трубы, и он не ограничен единственным инструментом для обнаружения, который создает поле для устройства, которое может использоваться в трубе. Такой инструмент слишком сложен, и его потребляемая мощность увеличивается из-за большого количества дополнительных узлов, с которыми он осуществляет обнаружение дефектов в трубе. Кроме того, этот инструмент обслуживается специальным персоналом, обученным для работы с ним и интерпретации данных, из-за сложности узлов INS и GPS.
Кроме того, опубликован патент США 6.100.684 раскрывающий систему обнаружения трещин и изменений в толщине стенок трубы, и способ обнаружения, используя такую систему. Эта система содержит: среду для формирования и ввода магнитного потока на части трубы, среду для измерения местных магнитных полей на внутренней поверхности трубы, среду для обработки, хранения и локализации таких измерений и среду для перемещения такой системы через поток жидкости в трубе. Такая система имеет недостаток по площади обнаружения и инспекции трубы, который основан на неспособности к отклонению от поступательного движения при повороте трубы, поскольку если изгиб слишком острый, инструмент может застрять в нем. Кроме того, система имеет большое количество различных узлов, которые двигают и перетаскивают инструмент.
В дополнение к упомянутым выше документам, мы нашли патент США 6.640.655, который относится к интеллектуальному инструменту, который имеет механизм привода, магнитную секцию и секцию хранения и записи данных. Магнитная секция имеет множество датчиков, которые обнаруживают различные дефекты на стенке анализируемой трубы. Механизм привода отвечает за проталкивание инструмента через трубу. Инструмент имеет систему подвески, которая позволяет определять толщину трубы и таким образом определить, существует ли нарушения целостности трубы.
Наиболее близким технологическим аналогом настоящего изобретения является патентная заявка США 2002/0011124, которая определяет интеллектуальный инструмент для обнаружения дефектов, которые могут быть найдены в трубе, особенно, при определении толщины стенки этой трубы. Этот инструмент, в основном, состоит из трех электронных блоков, которые включают блок датчиков, блок питания и блок хранения данных. Этот инструмент использует ультразвук для обнаружения дефектов. Основной недостаток этого инструмента состоит в том, что он может использоваться только в относительно прямых трубах, поскольку его система связи между блоками не позволяет ему легко проходить изгибы трубы, что ограничивает область его применения. Кроме того, описанное в этом документе изобретение не имеет ни ряда датчиков Холла, ни плат, связанных с ними, таким образом, в нем не используется персонализированная система групп датчиков и, следовательно, система не обеспечивает эффективное управление данными и высокую точность при обнаружении дефектов, которые могут иметь место в трубе.
Онлайновая инспекция трубы выдвигает две основных проблемы. Первой из них являются препятствия в трубе, такие как вмятины, преграды или геометрические ограничения, такие как кривые или клапаны, которые затрудняют перемещение обычных инструментальных средств и не позволяют осуществить инспекцию по всей длине трубы. Согласно описанию, инструментальные средства связаны с некоторыми неудобствами, поскольку они не собирают все данные, относящиеся к определенным секциям трубы, и в результате операторы получают неполное изображение или информацию относительно состояния трубы. Эти зоны, в основном, могут содержать потенциальные нарушения отказы или дефекты и могут потребовать приоритетного обслуживания, чтобы гарантировать нормальное функционирование трубы.
Учитывая это, требуются более эффективные инструменты, чтобы избежать вышеупомянутых ограничений по длине трубы, что вызывало большой интерес в течение прошлых лет. Некоторые из этих изобретений, которые пытаются преодолеть эти неудобства, упоминаются ниже.
В этом смысле обратимся к патенту США 4.769.598, который относится к устройству и способу оценки стенок трубы электромагнитным способом. Это изобретение, в основном, технически состоит из двух узлов, которые имеют некоторые устройства привода, которые позволяют инструменту скользить через трубу легким и безопасным способом. Один из узлов этого инструмента формирует электромагнитное поле, которое позволяет обнаружить дефекты на стенке трубы, и эти дефекты считываются магнитными датчиками.
Этот документ имеет недостаток, который состоит в том, что каждый из узлов содержат, по меньшей мере, четыре ролика или колеса, позволяющие инструменту скользить по стенке, и они выполняют только эту функцию, не позволяя таким колесам выполнять различные другие функции. Кроме того, инструмент, описанный в этом документе, не рассчитан на работу с системами управления и системами позиционирования, поскольку он не имеет платы мультиплексирования или платы управления, которая контролирует другие операции, в режиме прерывания, сигналами с микроконтроллеров таких плат. Кроме того, учитывая, что инструмент не оборудован этими платами, невозможно непрерывно управлять информацией, поступающей с датчиков, и нет надлежащей связи с компьютером для интерпретации полученных данных пользователем.
В онлайновой инспекции существует еще одна проблема, в основном, связанная с интерпретацией полученных данных. В существующих инструментальных средствах способом интерпретации хранящихся данных является после-инспекционная интерпретация, которая сводится к интерпретации хранящихся данных через программную обработку сигналов, поступающих через нейронные сети, Используемые для этого алгоритмы являются трудным, затратным и длительным процессом, который обычно требует проверки допустимости и интерпретации экспертом. Отметим также, что процесс требует элементов большой емкости и устойчивой архитектуры для хранения и обработки информации.
Способ, предложенный в настоящем изобретении представляет собой онлайновую интерпретацию данных, которая состоит в анализе информации, принятой в процессе инспекции от инструмента в режиме реального времени. Этот способ интерпретации предлагает универсальный стабильный инструмент для любого типа пользователей и также позволяет уменьшить количество и размеры устройств хранения данных, которые используются в этом инструменте.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Инструмент для обнаружения отверстий, как объект настоящего изобретения, включен в систему, состоящую из двух больших узлов: один для сбора, интерпретации и хранения данных и другой для декодирования данных и визуализации этих данных. Узел сбора данных, интерпретации и хранения является основным элементом инструмента для внутренней инспекции трубы. Эта инспекция, в основном, осуществляется с помощью магнитных датчиков (эффект Холла), и полученные данные обрабатываются и интерпретируются с помощью внутренних алгоритмов, которые позволяют получать, обрабатывать, интерпретировать и хранить в режиме реального времени всю информацию, которая соответствует типичным характеристикам обнаруженных отверстий.
Второй узел декодирования и визуализации данных включает программное обеспечение, которое отвечает за получение информации, хранящейся в инструменте, ее декодирование и представление в графическом интерфейсе, который понятен и управляем пользователем системы без необходимости экспертной проверки допустимости.
Узел сбора интерпретации и хранения данных в инструменте для обнаружения отверстий физически состоит из трех основных блоков: блок питания (1), основной блок управления (2) и блок магнитных датчиков (3). Дополнительно, инструмент может быть снабжен двумя вторичными блоками обнаружения повреждений, которые могут быть размещены в блоке магнитных датчиков (3).
Такие дополнительные модули могут или не могут использоваться по необходимости и определяются как ультразвуковое устройство и устройство визуального распознавания; они позволяют подтвердить информацию, полученную блоком магнитных датчиков (3); цель этого объекта состоит в предоставлении дополнительной информации.
Благодаря действию различных типов устройств обнаружения повреждений, которые содержит предлагаемый инструмент, можно обнаружить любой существующий дефект в трубе, среди них износ внутренней и внешней поверхности, что обеспечивает инструменту соответствующую диагностику целостности всего трубопровода для транспортировки углеводородных продуктов, принимая во внимание, что в этом случае его главная цель состоит в хранении только той информации, которая относится к соответствующим отверстиям.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение может быть лучше понято из изучения чертежей, на которых показаны каждый из элементов, составляющих интеллектуальный инструмент для обнаружения отверстий и онлайновой интерпретации данных. Кроме того, на чертежах приведены цифровые позиции, присвоенные соответствующим частям упомянутого устройства.
Фигура 1: Эта фигура соответствует общей схеме инструмента обнаружения.
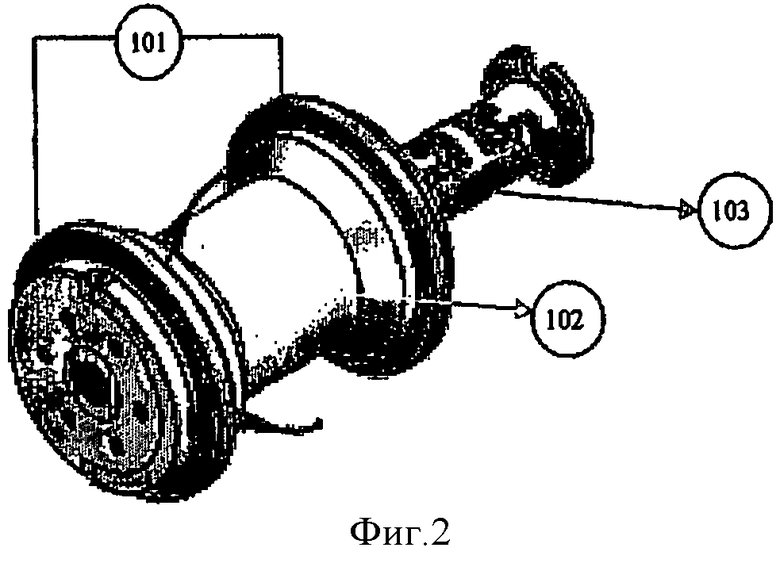
Фигура 2: Эта фигура соответствует светокопии блока батареи (1).
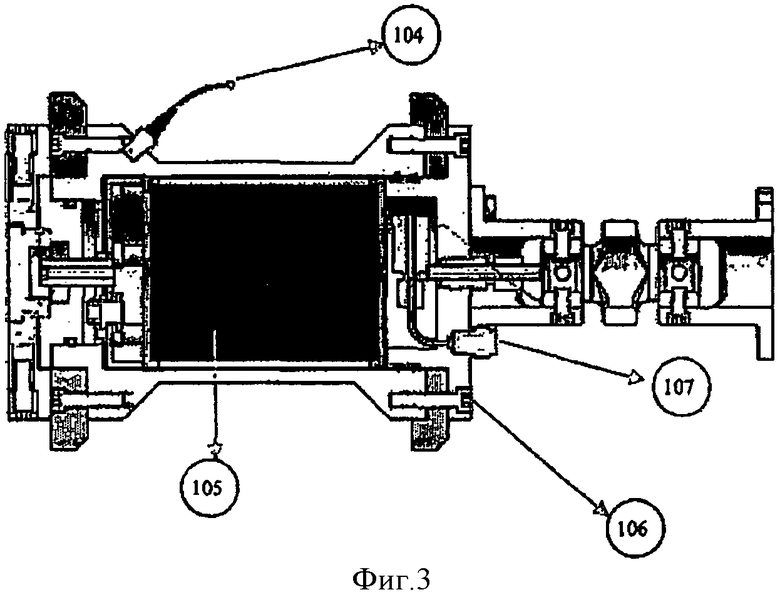
Фигура 3: Эта фигура соответствует поперечному разрезу блока батареи (1) из фигуры 2.
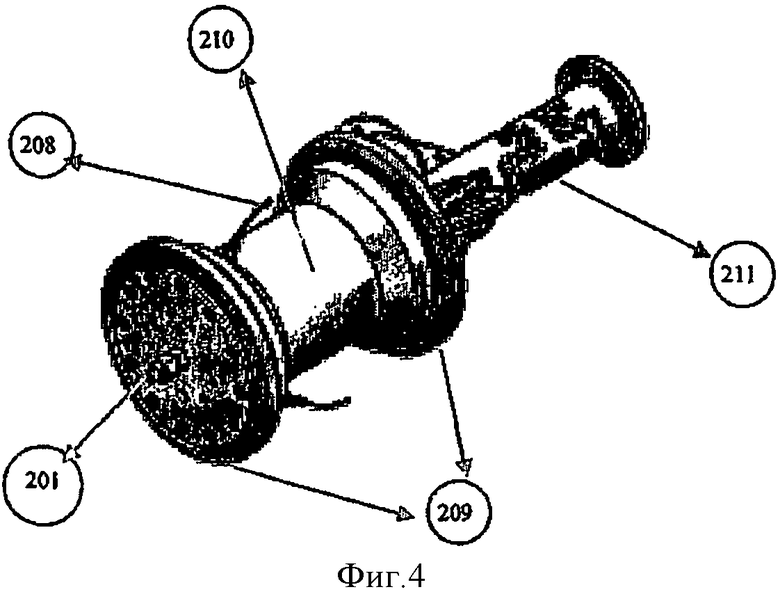
Фигура 4: Эта фигура соответствует плоскости расположения и основного блока управления (2).
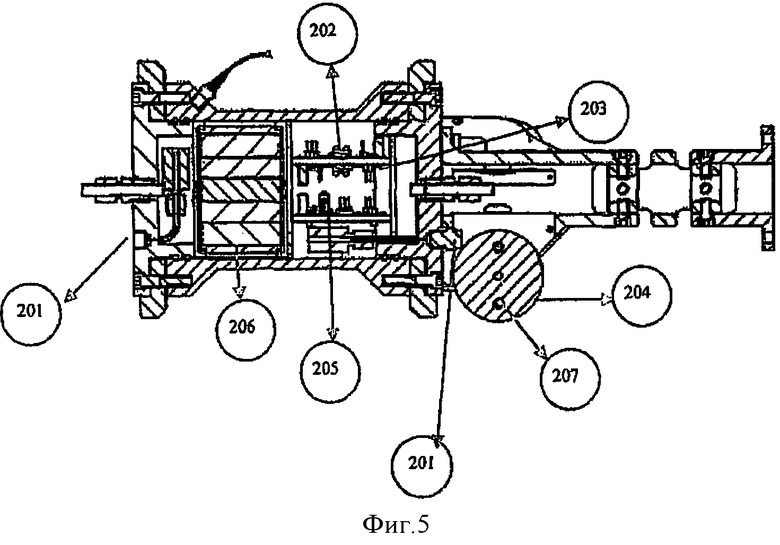
Фига 5: Эта фигура соответствует поперечному разрезу устройства и основного блока управления (2) из фигуры 4.
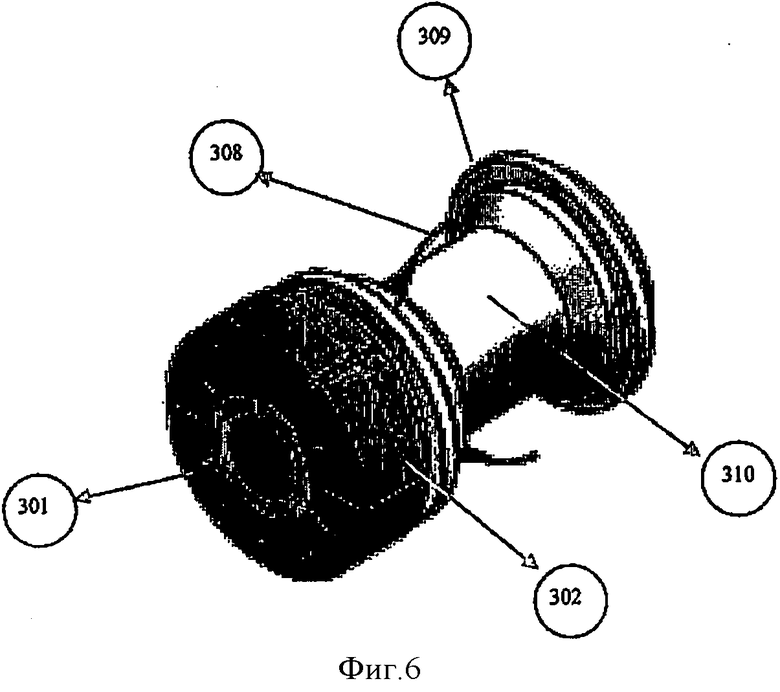
Фигура 6: Эта фигура соответствует плоскости блока магнитных датчиков (3).
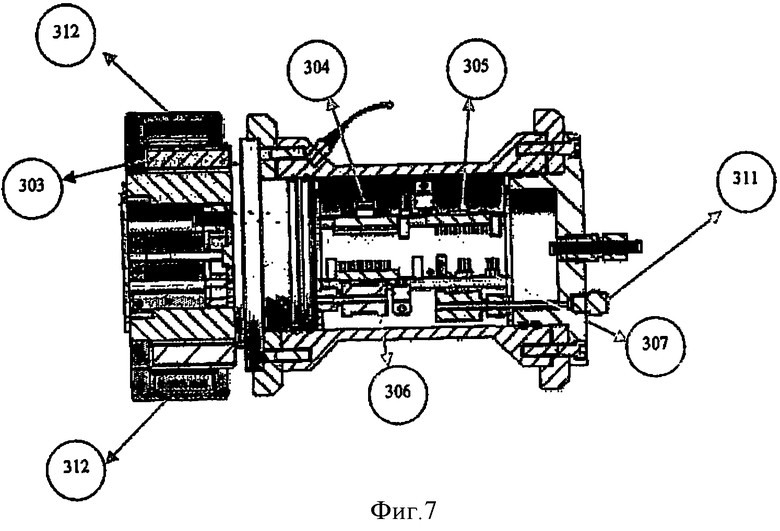
Фигура 7: Эта фигура соответствует поперечному разрезу блока магнитных датчиков (3).
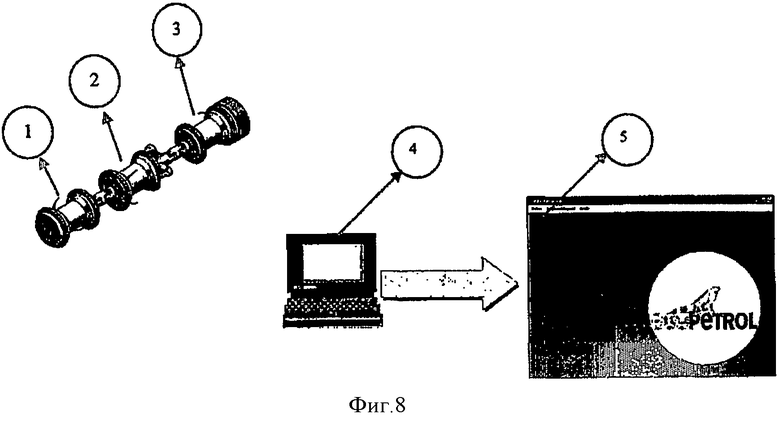
Фигура 8: Эта фигура соответствует общему и концептуальному устройству узла сбора, хранения и визуализации информации.
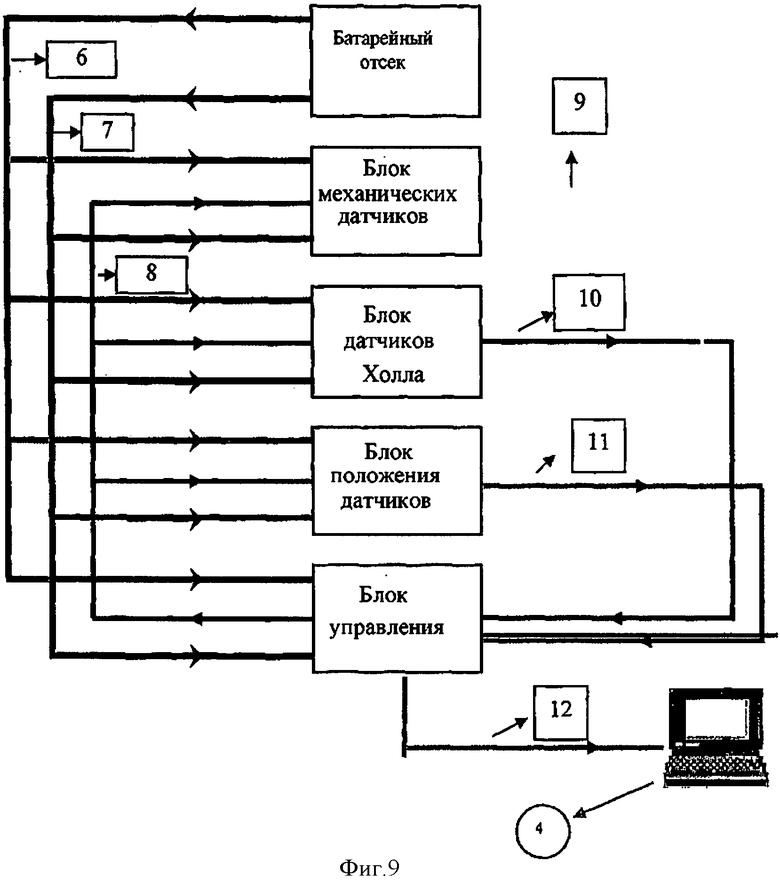
Фигура 9: Эта фигура соответствует блок-схеме процесса сбора и хранения данных.
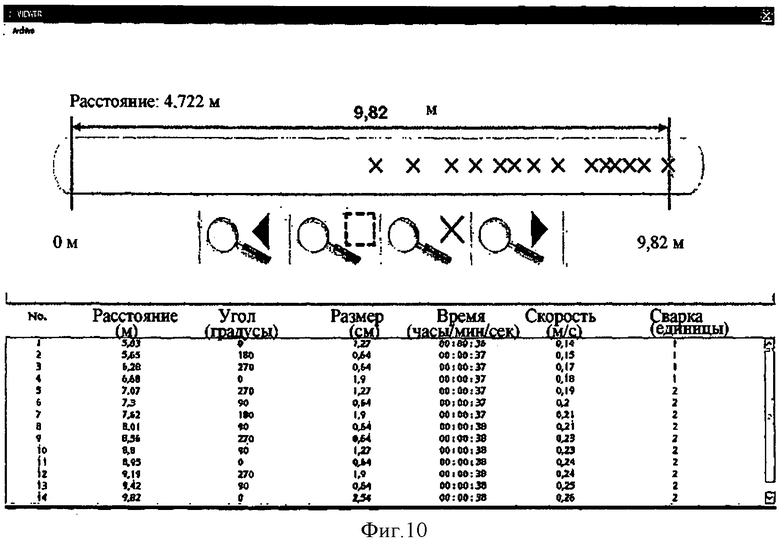
Фигура 10: Эта фигура соответствует результатам, полученным при использовании инструмента по настоящему изобретению, которое описано на примере 1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фигуре 1 показан инструмент для обнаружения отверстий и онлайновой интерпретации данных, который состоит из трех блоков, определенных как блок питания (1), основной позиционирующий и управляющий блок (2) и блок магнитных датчиков (3). И каждый из этих блоков состоит из ряда элементов, которые выполняют определенную работу и обеспечивают новизну настоящего изобретения.
Блок питания (1) показан на фигурах 2 и 3, и отвечает за подачу необходимой энергии для всего инструмента. Кроме того, этот блок выполняет функцию регулирования всех напряжений, необходимых каждому из элементов, расположенных на других блоках. Этот блок питания (1) в виде схемы внутренних соединений расположен в том же самом блоке, соединяющем батареи (105) и внешний соединитель (106) с целью обеспечить заряд батареи при необходимости.
Вышеупомянутый блок питания (1) снабжен различными сглаживающими конденсаторами, которые могут иметь емкость от 1 микрофарады до 100 микрофарад с целью максимального снижения пульсаций тока и помех, которые могут возникнуть на стадии регулирования системы.
Блок питания (1), в основном, состоит из множества батарей (105) с техническими параметрами от 2500 мА/час до 5000 мА/час и напряжением от 1,2 В до 5 В, чтобы создать общий блок напряжений от 9,5 В до 12 В и тока от 18000 мА/час до 22000 мА/час, в соответствии с техническими условиями электропитания датчиков, микроконтроллеров, устройств памяти и различных электронных элементов. Блок питания обеспечивает достаточное количество электроэнергии для инструмента и выполнения его соответствующих функций, принимая во внимание расстояние, которое инструмент должен пройти в трубе.
Физически, внешняя конструкция каждого из блоков (1, 2 и 3) является одинаковой. Они состоит из двух опорных дисков (101, 209 и 309) и металлического корпуса (102, 210 и 310). Диски (101, 209 и 309) обеспечивают устойчивость инструмента в трубе, учитывая, что по всему пути они полностью скреплены вместе и прижаты к внутренней стенке трубы. По этой причине, диски (101, 209 и 309) должны быть изготовлены из прочного материала, стойкого к трению, высокому давлению и химической природе перекачиваемой жидкости. Диски предпочтительно изготавливаются из полиуретана или полипропилена.
Корпус (102, 201, 310) блока является полой металлической трубой, обеспечивающей необходимую жесткость. Предпочтительно, корпус имеет толщину стенки, которая выдерживает внешнее давление до 15 МПа. Блок питания (1) так же как другие блоки (2, 3) имеют внешний контакт в трех точках (104, 208, 308), которые обеспечивают контакт с поверхностью во время движения инструмента и отводят всю возможную энергию или статический заряд, который они могут получить за счет трения.
Во внутренней части корпуса батарейного отсека (1) размещается блок батарей (105). Кроме того, этот блок соединен с основным позиционирующим и управляющим блоком (2) через гомокинетическое соединение (103, 211), который обеспечивает гибкость системы, позволяя инструменту перемещаться по кривым трубам. Схема внутренних соединений с проводами связи и питания проходит через эти соединения.
Основной позиционирующий и управляющий блок (2), показанный на фигурах 4 и 5, разделен на две секции согласно выполняемым функциям, которые состоят в получении данных о расположении инструмента и поддержке основного контроллера.
Секция позиционирования выполняет два необходимых действия. Первое заключается в измерении тремя одометрами расстояния, которое прошел инструмент в трубе, с момента запуска до момента окончания движения, чтобы получить расстояние, на котором расположены все найденные отверстия. Одометрическая плата (203) обеспечивает управление этой информацией в основном, позиционирующем и управляющем блоке (2). Каждый из этих трех одометров состоит из колеса (204), которое должно быть в контакте с внутренней стенкой трубы во время прохождения всего пути, и поэтому оно должно быть изготовлено из износостойкого материала, но с высоким коэффициентом трения, учитывая, что оно никогда не должно скользить, потому что это создавало бы ошибки при телеизмерении. Исходя из этого, колесо (204) может быть изготовлено из Тефлона, Вайтона, полиуретана или их смеси. Кроме того, колесо (204) имеет два встроенных магнита (207) расположенных на противоположных сторонах одной и той же поверхности. Эти магниты (207) позволяют считывать количество оборотов колеса (204), чтобы получить значение расстояния через магнитные датчики.
Другая функция основного блока позиционирования и управления (2) состоит в измерении углового положения каждого отверстия или дефекта, который обнаружен по поперечному разрезу трубы. Для этого, используются два акселерометра, расположенные на одометрической плате (203) и формирующие различное напряжение для каждого положения на плоскости по двум координатам X-Y, в которых находится инструмент. Затем эти значения обрабатываются алгоритмом, который в результате указывает на угловое расположение отверстия или дефекта, который был найден по окружности трубы. Вся эта информация отправляется микроконтроллеру, расположенному на плате положения (202). Эта плата положения (202) также связана с часами в реальном времени, которые позволяют фиксировать точный момент (время) обнаружения отверстий или дефектов. Данные акселерометров и часов в реальном времени в нужный момент передаются через микроконтроллер на основную плату управления (205).
Этот основной блок позиционирования и управления (2) имеет схему внутренних соединений и содержит выводы последовательной передачи, через которые все данные будут переданы основному контроллеру, кроме блока дополнительной батареи (206), которая распределяет энергию, предоставляемую батарейным отсеком (1).
Секция основного контроллера содержит плату управления (205). Эта плата управления (205) обеспечивает получение всех данных от периферийных устройств инструмента для их организации, кодирования и хранения для последующего использования в памяти, предпочтительно, EEPROM, RAM, Кэшпамяти, флеш-памяти или ROM по протоколу связи 12C.
Устройства памяти обеспечивают хранение и поддержку информации об отверстиях или дефектах, найденных по пути после его полного прохождения, и эта информация может быть загружена и устройством внешней визуализации, таким как компьютер, персональные секретари PDA, сотовые телефоны и тому подобные устройства.
Блоки (1, 2 и 3) снабжены входными и выходными клапанами (107, 201 и 311) для ввода или вывода азота или другого инертного газа, который вытесняет воздух из блока и создает инертную среду, которая обеспечивает безопасную работу инструмента.
Блок магнитных датчиков (3) на фигурах 6 и 7 обеспечивает обнаружение отверстий и дефектов в трубе. Так, при наличии отверстия или дефекта на этом участке трубы имеет место максимальная потеря металла, и наиболее часто используемый способ, для измерения этих потерь является способ рассеяния магнитного потока (MFL). Этот инструмент использует способ MFL с измерением изменения магнитного поля датчиками Холла, который в настоящее время не используется никакими инструментальными средствами, которые были найдены в уровне техники.
Обычно в способе MFL намагничиваются стенки трубы, и датчики измеряют изменения магнитного поля, которое может быть сформировано в них. В отличие от этого, инструмент по настоящему изобретению работает с конфигурацией системы датчиков, в которой элементы, создающие магнитное поле, для намагничивания стенок трубы, не находятся в прямом контакте с ними. Такие элементы, создающие магнитное поле, являются постоянными магнитами (303) радиально расположенными на корпусе блока, в виде короны датчиков (312) таким образом, что каждый из них взаимодействует с датчиком Холла (302). Эти датчики Холла (302) расположены радиально на расстоянии от 1 до 3 миллиметров от внутренней стенки трубы. Изменения в магнитном поле представлены изменениями выходного напряжения датчиков, позволяя обнаруживать отверстия или дефекты трубопровода.
Магниты (303) используемые на блоке магнитных датчиков (3) могут состоять из керамических, кремниевых или редкоземельных элементов, предпочтительно из последних с плотностью поля от 100 до 200 милливебер (10000 и 20000 гауссов). Магниты из редкоземельных элементов могут быть выбраны от группы, состоящей из самария, кобальта, бора или неодима, хотя желательно использовать неодим, обладающий хорошими магнитными характеристиками.
Корона датчиков (312) этого блока (3) состоит из шести секций короны (301), в которой расположены датчики Холла, предпочтительно в количестве 30-70 датчиков, более предпочтительно от 40 до 60. Эти секции короны (301) находятся в контакте с внутренними стенками трубы по всему пути прохождения, таким образом, материал, из которого они изготовлены, должен быть прочным и износостойким, предпочтительно, это должен быть полиуретан, полипропилен или их смеси.
В предпочтительном варианте этот блок (3) состоит из четырех плат. Три из них обеспечивают управление информацией от датчиков Холла (302) в группах по равному числу в каждой. Для случая 48 датчиков Холла (302) каждая плата имеет 16 таких датчиков.
Блок (3) содержит четыре электронных платы, которые сконфигурированы по принципу «ведущий-ведомый» элемент. Три мультиплексных платы (304, 305 и 306) действуют как ведомые элементы, выполняя алгоритмы, которые позволяют получить информацию в режиме реального времени, которая действительно важна. Плата, которая действует как ведущий элемент, является четвертой платой коммутации (307), которая обеспечивает управление и синхронизацию упомянутых выше мультиплексных плат (304, 305 и 306).
Мультиплексная плата (304) обеспечивает получение и интерпретацию данных, исходящих из датчиков 1-16. Для достижения этого, плата связана с микроконтроллером, который является интеллектуальной частью платы и обеспечивает получение информации от датчиков, ее анализ и интерпретацию в режиме реального времени. Этот микроконтроллер должен иметь 8, 16 или больше битов, и иметь память данных не менее чем 256×8 байтов. Кроме того, он должны иметь последовательный блок передачи, аналого-цифровой преобразователь и ICSP (внутрисхемный программный модуль.
Для управления передачей данных с датчиков на микроконтроллер используется аналоговый мультиплексор и формирователь сигнала (CAS), которые расположены между выходом мультиплексора и входом микроконтроллера, с целью определения местоположения важной информации, обеспечиваемой датчиками Холла (302) и удаления ненужной информации. Описанная конфигурация повышает чувствительность и увеличивает скорость интерпретации.
Кроме того, мультиплексорная плата (304) связана с двойным регулированием напряжения, учитывая, что рабочие пределы интегральных схем отличаются от пределов датчиков, интегральных фильтров КС в системе, чтобы минимизировать помехи, которые могут вызвать ошибки при измерениях.
С другой стороны, мультиплексорная плата (305) обеспечивает получение и интерпретацию данных, полученных от датчиков 17-32. Конфигурация этой платы подобна конфигурации, описанной в отношении платы мультиплексора (304), принимая во внимание вышеопределенные параметры.
Мультиплексорная плата (306) сконфигурирована аналогичным образом, как и другие две мультиплексорные платы (304 и 305) с той разницей, что эта плата обеспечивает получение и интерпретацию данных, полученных от датчиков 33-48.
Коммутационная и мультиплексорная плата (307) является звеном связи между мультиплексорными платами (304, 305 и 306) и обеспечивает получение, анализ и фильтрацию в реальном времени полезной информации и данных, необходимых для отправки таких данных в центр управления в заданный момент. Эта работа делается с помощью программных алгоритмов в микроконтроллере в коммутационной и мультиплексорной плате (307). Этот микроконтроллер должен иметь те же самые характеристики, что и микроконтроллер, выделенный для мультиплексорных плат (304, 305 и 306), используемых для синхронизации передачи между платами.
С другой стороны, плата управления (205), которая находится в основном управляющем блоке (2), обеспечивает управление работой и протоколом связи со всеми другими платами инструмента. Кроме того, такая плата управления (205) контролирует любое событие, которое происходит, то есть она обеспечивает обнаружение отверстий, дефекта сварки, износа или другого внутреннего дефекта, который может иметь место в трубе.
Эта плата управления (205) также обеспечивает хранение всей важной информации, полученной из результатов инспекции, и устанавливает связь с устройством визуального распознавания (4), когда выполнена передача обработанных данных и данные сохранены в памятях.
Аналогичным образом, плата управления (205) имеет микроконтроллер, характеристики которого подобны характеристикам предыдущих плат, но дополнительно имеет память для хранения информации. Учитывая, что инструмент выполняет сбор, анализ, интерпретацию и фильтрацию информации в онлайновом режиме, нет необходимости снабжать его памятью большой емкости, но могут использоваться различные типы устройств памяти, предпочтительно EEPROM, RAM, FLASH или ROM, емкостью от 128 до 2048 килобит, предпочтительно от 256 до 1024 килобит.
Кроме того, плата положения (202) обеспечивает получение информации углового положения и времени (часы, минуты и секунды) в секции трубы, где обнаружено отверстие или дефект. Для этого плата положения (202) снабжается интеллектуальной частью, которая состоит из микроконтроллера с теми же характеристиками, что и характеристики плат, описанных выше.
Кроме того, эта плата снабжена двумя акселерометрами, обеспечивающими координаты X-Y, в которых находится инструмент во время процесса обнаружения и инспекции. Эта информация подается в микроконтроллер как разница напряжений, которая через предварительно запрограммированный алгоритм преобразуется в угловое положение, которое будет отправлено на плату управления (205). Плата положения (202) также связана с часами в реальном времени и обеспечивает синхронизацию соединения с микроконтроллером. Эти часы обеспечивают непрерывную посылку сигналов времени, прошедшего за период инспекции, выполняемой вдоль целевой трубы. Положение и данные времени сохраняются только в момент, указанный платой управления (205).
Аналогичным образом, позиционирующий и управляющий блок (2) связан с одометрической платой (203), которая обеспечивает передачу информации о расстоянии, пройденном инструментом в трубе. Эта плата содержит микроконтроллер с характеристиками, аналогичными характеристикам вышеописанных плат, принимая во внимание, что этот контроллер должен иметь, по меньшей мере, три аналого-цифровых преобразователя, с учетом того, что через эти терминалы вводится информации от датчиков Холла, расположенных на опоре колеса (204) каждого из этих трех одометров. Так же как и в предыдущем случае, информация о пройденном расстоянии сохраняется только в момент, указанный платой управления (205).
В дополнение к блоку магнитных датчиков (3), инструмент снабжен дополнительными системами обнаружения, которые могут использоваться в нужный момент, учитывая, что модульная структура инструмента позволяет это сделать без каких-либо затруднений, просто добавляя дополнительные устройства памяти того же типа и увеличивая количество батарей в соответствии с областью применения. Эти дополнительные системы обнаружения используются в случае, когда требуется более полная инспекция трубы для получения информации не только о соответствующем отверстии, но также и об общем состоянии трубы.
Кроме того, в дополнение к блоку магнитных датчиков (3) система может быть снабжена ультразвуковым устройством, которое работает с передатчиком и приемником сверхзвуковых волн. Эти волны непрерывно излучаются по направлению к внутренним стенкам трубы, которые отражают эти волны по направлению к приемнику. Приемник имеет датчик, который позволяет преобразовать акустические сигналы в электрические, анализировать их в реальном времени соответствующими алгоритмами микроконтроллера ультразвукового устройства и, таким образом, определить, имеется ли отверстие или дефект в трубе.
Аналогичным образом блок магнитных датчиков (3) может включать устройство визуального распознавания, которое снабжено инфракрасной камерой, которая позволяет получать непрерывные изображения внутренней секции трубы, по которой перемещается инструмент. Эти изображения поступают во внутренний процессор, который, используя алгоритмы обработки изображений, хранящиеся в микроконтроллерах, определяют состояние внутренней стенки трубы. Вся эта информация после прохождения через ряд описанных выше плат интерпретируется в режиме реального времени и хранится в памяти.
Устройство визуального распознавания (4) является дополнением к описанному инструменту. После выполнения инспекции инструмент для обнаружения отверстий соединяется с таким устройством визуального распознавания (4), программное обеспечение которого немедленно связывается с указанным инструментом с помощью основного блока позиционирования и управления (2), в частности, через плату управления (205). Вся информация, хранящаяся в памяти такой платы, передается устройству визуального распознавания (4) для декодирования, упорядочивания и визуального распознавания. Затем программное обеспечение, содержащееся в упомянутом блоке визуального распознавания (4), обеспечивает показ результатов инспекции в графическом интерфейсе, к которому имеет доступ каждый сотрудник персонала. Это программное обеспечение совместимо с типом микроконтроллера, который встроен в плату управления (205).
Устройство визуального распознавания (4) отображает каждое обнаруженное отверстие или дефект, количество отверстий или дефектов, так же как расстояние относительно начальной точки, углового положения отверстий или дефекта в поперечном разрезе трубы, размер отверстия или дефекта, скорость движения инструмента в момент обнаружения и время момента обнаружения в часах, минутах и секундах.
В предпочтительном режиме, время загрузки информации в 1000 отверстий инструментом и устройством визуального распознавания (4) лежит в диапазоне от одной до двух минут. Кроме того, программное обеспечение, разработанное для сбора и визуального распознавания данных, которое находится в устройстве визуального распознавания (4), также обладает опцией диагностики работы каждого из датчиков Холла в режиме реального времени функционирования, что позволяет вовремя определять неисправность любого их этих датчиков.
На фигуре 9 представлена блок-схема электронной обработки, выполняемой инструментом, в которой участвует каждый из вышеописанных блоков и которые являются основной частью настоящего изобретения, так же как поток связанных с ней процессов.
На этой фигуре можно видеть, что блок питания (1) соединен с каждым из других блоков с целью подачи необходимой энергии для их работы и обеспечивает рабочий процесс блоков (6 и 7) в трубе.
Основной позиционирующий и управляющий блок (2) представлен на рисунке 9 как блок положения и блок управления, которые взаимодействуют друг с другом и с другими блоками путем передачи процесса позиционирования (11) на стадии приема управления (8), описанной выше, и как это обозначено стрелками потока.
Блок магнитных датчиков (3) определен блоком механического обнаружения и блоком Холла, которые обеспечивают выполнение процесса передачи механического датчика (9) и процесса передачи датчика Холла (10), которые обрабатываются управляющим блоком.
Блок управления выполняет процесс передачи данных (12), которые поступают в устройство визуального распознавания (4), чтобы представить и показать информацию, полученную из процесса сбора, анализа, интерпретации и фильтрации в формате, облегчающим понимание конечным пользователем.
Подводя итог, отметим, инструмент по настоящему изобретению работает с помощью платы управления (205), которая контролирует действия и информационный поток от других электронных плат, включая плату положения (202), плату одометра (203) и коммутационную и мультиплексорную плату (307), через режим прерывания, выполняемый в микроконтроллере каждой из плат. Кроме выполнения этой функции, плата управления хранит данные, собранные другими платами, поскольку она снабжена достаточным объемом памяти.
С другой стороны, она также обеспечивает установление связи с устройством визуального распознавания (4) в момент загрузки хранящихся данных или использует одну из различных программ, содержащихся в программном обеспечении инструмента для сбора и визуального распознавания данных.
Обмен информацией между всеми платами выполняется на основе последовательного асинхронного протокола связи, аналогичного протоколу связи с устройством визуального распознавания (4). Таким образом, информация, принятая указанной платой управления (205), обрабатывается и классифицируется, чтобы решить, соответствует ли она характеристикам отверстий. В утвердительном случае, плата управления (205) запрашивает информацию от платы положения (202) и от одометрической платы (203), и затем сохраняет всю эту информацию в памяти с целью анализа этой информации в режиме реального времени.
В случае если классифицированная информация не соответствуют характеристикам отверстий, следующий процесс укажет, соответствует ли информация другому параметру, обнаруженному датчиками, такими как изгиб трубы или сварка, которые не должны быть сохранены в памяти, но должны быть приняты во внимание для правильного функционирования инструмента. Этот процесс повторяется до тех пор, пока инструмент не обнаружит, что линия, которую он инспектирует, закончена.
ПРИМЕРЫ
Пример №1
Выполняемый тест состоял в проведении инспекции с помощью инструмента для обнаружения отверстий, проходящий через трубу длиной 10 метров. В этой трубе было сделано двадцать отверстий, среди которого тринадцать имели диаметр 6,35 мм (1/4"), три 12,7 мм (1/2"), три из 19,05 мм (3/4") и одно 25,4 мм (1"), с целью проверить функционирование системы, величину, если отверстия обнаружены, и характеристики каждого сохраненного в памяти. Отверстия диаметром 25,4 мм (1") были сделаны в частях трубы соединенных сваркой для всех случаев. Кроме того, цель теста состояла в проверке корректной загрузки данных в устройство визуального распознавания, в данном случае, в персональный компьютер.
Для моделирования динамики жидкости, использовался электродвигатель, который обеспечивал перемещение инструмента в трубе. Скорость механизма регулировалась электронным приводом, который обеспечивал перемещение инструмента во время испытания со скоростью двух метров в секунду, что является типичной скоростью движения углеводородной среды в трубопроводе.
Кроме того, важно упомянуть, что тест проводился с подавлением функции формирователя сигналов (CAS) в плате управления (205).
Результаты испытаний
Как можно видеть из фигуры 10, результаты, полученные по программе обеспечения визуального распознавания, в данном случае, используя персональный компьютер, состоят в следующем:
- Было обнаружено 14 из 20 отверстий:
- 3 по 12,7 мм
- 3 по 19,05 мм
- 1 по 25,4 мм
- 6 по 6,35 мм
- Были обнаружены два сварочных шва на расстоянии 10 метров вдоль трубы.
- Соответствующие данные по характеристикам расстояния, углового положения и размерам, являются результатом реальной информации об отверстиях и составляют низкую ошибку в процентах.
- Загрузка данных в компьютер была успешной, и время загрузки информации, соответствующей этим 14 отверстием, не превышало двух секунд.
- Было подтверждено, что онлайновая интерпретация выполнена удовлетворительно.
Пример №2
Этот тест состоял в выполнении инспекции с инструментом для обнаружения отверстий, пропуская инструмент через трубу длиной 10 метров. В этой трубе были сделаны 24 дефекта, четырнадцать из размером 6,35 мм (1/4"), из которых два от представляли собой просверленные отверстия и двенадцать были выполнены сваркой; три диаметром 12,7 мм (1/2"), два диаметром 19,05 мм (3/4") и два диаметром 25,4 мм (1"). Кроме того, в трубе сваркой было проделано прямоугольное отверстие, чтобы доказать, что система обнаруживает дефекты сварки, причем характеристики каждого дефекта сохранялись в памяти, и все данные загружались компьютер.
Для моделирования динамики жидкости, использовался электродвигатель, который обеспечивал перемещение инструмента в трубе. Скорость механизма регулировалась электронным приводом, который обеспечивал перемещение инструмента во время испытания со скоростью двух метров в секунду.
Результаты испытаний
- Были обнаружены 22 из 24 отверстий:
- 3 по 12,7 мм (1/2")
- 2 по 19,05 мм (3/4")
- 2 по 25,4 мм (1")
- 12 по 6,35 мм (1/4")
Прямоугольное отверстие 5×10 мм
- Было обнаружено два сварных шва на 10 метрах трубы.
- Данные, соответствующие расстоянию, угловому положению и размеру, являются результатом реальной информации об отверстиях и имели низкую процентную погрешность.
- Загрузка данных в компьютер была успешной, и время загрузки, соответствующей этим 22 отверстиям, не превысило двух секунд.
- Было подтверждено, что онлайновая интерпретация была удовлетворительной.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКТ ДАТЧИКА НА ОСНОВЕ ЭФФЕКТА ХОЛЛА С ДИАГНОСТИЧЕСКИМИ ВОЗМОЖНОСТЯМИ | 2014 |
|
RU2662036C2 |
| Портативный электромагнитный сканер-дефектоскоп для неразрушающего контроля бурильных труб | 2019 |
|
RU2727559C1 |
| УСТРОЙСТВО И СПОСОБ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2022 |
|
RU2784140C1 |
| Космический мобильный робот-инспектор | 2022 |
|
RU2783640C1 |
| УСТРОЙСТВО МАГНИТНОГО ДЕФЕКТОСКОПА И СПОСОБ УМЕНЬШЕНИЯ ПОГРЕШНОСТИ ОПРЕДЕЛЕНИЯ РАЗМЕРОВ ДЕФЕКТОВ ТРУБОПРОВОДА МАГНИТНЫМИ ДЕФЕКТОСКОПАМИ | 2014 |
|
RU2586261C2 |
| НАВИГАЦИЯ С ПОМОЩЬЮ ОПТОВОЛОКОННОГО ДАТЧИКА ДЛЯ ВИЗУАЛИЗАЦИИ И МОНИТОРИНГА СОСУДОВ | 2013 |
|
RU2686954C2 |
| ИНТЕРФЕЙС ДЛЯ УСТРОЙСТВА ДЛЯ АВТОМАТИЧЕСКОГО РАСПРЕДЕЛЕНИЯ ГИГИЕНИЧЕСКОЙ ЛИСТОВОЙ БУМАГИ | 2014 |
|
RU2665453C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО КОМПОНЕНТА СКВАЖИННОГО УСТРОЙСТВА ЗАКАНЧИВАНИЯ СКВАЖИНЫ | 2008 |
|
RU2446282C2 |
| Устройство для автоматической дезинфекции поручней, дверных ручек и других протяженных объектов при помощи ультрафиолетового излучения | 2020 |
|
RU2734046C1 |
| АППАРАТ С УПРАВЛЕНИЕМ ПИТАНИЯ ОТ АККУМУЛЯТОРА | 2014 |
|
RU2619735C1 |
Изобретение относится к внутритрубной дефектоскопии и может быть использовано для обнаружения отверстий в трубопроводах. Сущность: инструмент содержит соединенные между собой блок питания (1), позиционирующий и управляющий блок (2) и блок магнитных датчиков (3). Блок магнитных датчиков выполнен в виде постоянных магнитов, расположенных радиально в короне датчиков с возможностью взаимодействовать своим магнитным полем с датчиками Холла (302). Функция инструмента заключается в его прохождении через трубопровод по всей его длине, контролируя толщину этого трубопровода и обнаруживая любое отверстие по пути прохождения и, в соответствии с полученными данными, устанавливая расстояние, на котором расположены отверстия, начиная от исходной точки, время в момент обнаружения, а также положение по окружности трубопровода. Все измерения являются частью онлайнового процесса, выполняемого по мере движения инструмента через трубопровод. В конце выполнения процесса информация может быть загружена в компьютер, где она становится доступной для использования и для принятия соответствующих решений относительно целостности трубопровода. 2 табл., 36 з.п. ф-лы, 10 ил.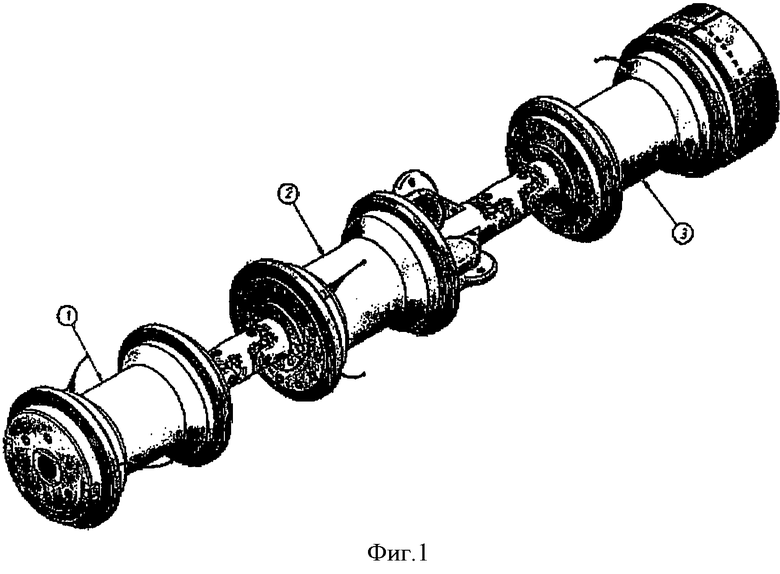
1. Инструмент для обнаружения дефектов и отверстий в трубе и онлайновой интерпретации данных, содержащий соединенные между собой блок питания (1), позиционирующий и управляющий блок (2), который выполняет функции:
- измерения расстояния, пройденного инструментом;
- измерения углового положения дефектов и отверстий в трубе; и
- анализа и интерпретации информации;
- и блок магнитных датчиков (3) сбора информации о дефектах и отверстиях в трубе, который выполнен в виде постоянных магнитов (303), расположенных радиально в короне датчиков (312) и с возможностью взаимодействовать своим магнитным полем с датчиками Холла (302).
2. Инструмент по п.1, отличающийся тем, что датчики Холла блока магнитных датчиков (3) размещены радиально на расстоянии от 1 мм до 3 мм от внутренней стенки трубы.
3. Инструмент по п.1, отличающийся тем, что магниты (303), используемые в блоке магнитных датчиков (3), выполнены керамическими, типа Альнико или состоят из редкоземельных элементов.
4. Инструмент по п.3, отличающийся тем, что магниты предпочтительно выбраны из группы, состоящей из редкоземельных элементов с плотностью поля от 100 до 200 милливебер (10000-20000 гауссов).
5. Инструмент по п.4, отличающийся тем, что магниты выбраны из группы, состоящей из самария, кобальта, бора или неодима.
6. Инструмент по п.5, отличающийся тем, что магниты изготовлены из неодима.
7. Инструмент по п.1, отличающийся тем, что корона датчиков (312) состоит из шести секций (301), в которых расположены датчики Холла.
8. Инструмент по п.7, отличающийся тем, что корона датчиков содержит от 30 до 70 датчиков.
9. Инструмент по п.8, отличающийся тем, что корона датчиков содержит от 40 до 60 датчиков.
10. Инструмент по п.7, отличающийся тем, что корона датчиков изготовлена из полиуретана, полипропилена или их смеси.
11. Инструмент по п.1, отличающийся тем, что блок (3) содержит, по меньшей мере, четыре платы в конфигурации ведущее-ведомое устройство.
12. Инструмент по п.11, отличающийся тем, что ведомые платы - мультиплексорные платы, которые обеспечивают управление информацией, поступающей из датчиков Холла (302) в группах с равным количеством датчиков в каждой.
13. Инструмент по п.11, отличающийся тем, что ведомые платы - три мультиплексорные платы (304, 305 и 306), которые выполняют алгоритмы, позволяющие получить в режиме реального времени информацию об отверстиях или дефектах трубы.
14. Инструмент по п.11, отличающийся тем, что ведомые платы также содержат формирователь сигнала (CAS) от выхода мультиплексора до ввода микроконтроллера.
15. Инструмент по п.11, отличающийся тем, что четвертая коммутационная и мультиплексорная плата (307) выполнена в виде ведущего устройства, обеспечивающего управление и синхронизацию мультиплексорных плат (304, 305 и 306).
16. Инструмент по п.11, отличающийся тем, что платы содержат микроконтроллер на 8, 16 или больше битов, и память данных не менее чем на 256×8 байтов.
17. Инструмент по п.16, отличающийся тем, микроконтроллер включает последовательный блок передачи, аналого-цифровой преобразователь и устройство внутрисхемного программирования (ICPS).
18. Инструмент по п.11, отличающийся тем, что блок магнитных датчиков содержит четыре платы, одна из них ведущая и три ведомые, которые обеспечивают управление информацией от 48 датчиков Холла (302), распределенных группами по 16 датчиков на плату.
19. Инструмент по п.1, отличающийся тем, что позиционирующий и управляющий блок (2) разделен на два секции, одна для сбора данных положения и другая для поддержки основного контроллера.
20. Инструмент по п.19, отличающийся тем, что секция позиционирования содержит, по меньшей мере, три одометра на колесе (204), контактирующем с внутренней стенкой трубы в процессе движения инструмента, причем в колесе (204) имеется два встроенных магнита (207), расположенных на противоположных сторонах одной и той же поверхности.
21. Инструмент по п.20, отличающийся тем, что колесо (204) изготовлено из износостойкого материала с высоким коэффициентом трения, выбранным из тефлона, вайтона, полиуретана или их смесей.
22. Инструмент по п.19, отличающийся тем, что блок (2) также содержит одометрическую плату (203), которая имеет, по меньшей мере, два акселерометра, которые измеряют угловое положение каждого отверстия или обнаруженного дефекта.
23. Инструмент по п.22, отличающийся тем, что одометрическая плата (203) также содержит микроконтроллер, который имеет, по меньшей мере, три аналогово-цифровых преобразователя.
24. Инструмент по п.19, отличающийся тем, что блок (2) содержит секцию сбора данных положения с платой положения (202), которая имеет микроконтроллер, и часы реального времени.
25. Инструмент по п.24, отличающийся тем, что контроллер содержит плату управления (205) с памятью для хранения информации.
26. Инструмент по п.25, отличающийся тем, что память для хранения информации выбрана из группы, состоящей из EEPROM, RAM, FLASH и ROM.
27. Инструмент по п.26, отличающийся тем, что память для хранения информации имеет емкость от 128 до 2048 килобит.
28. Инструмент по п.27, отличающийся тем, что память для хранения информации имеет емкость предпочтительно от 256 до 1024 килобит.
29. Инструмент по п.1, отличающийся тем, что блок питания (1) содержит блок батареи (105), схему внутренних соединений, внешний соединитель (106) и сглаживающие фильтры.
30. Инструмент по п.29, отличающийся тем, что сглаживающие фильтры имеют конденсаторы емкостью от 1 микрофарады до 100 микрофарад.
31. Инструмент по п.29, отличающийся тем, что батареи батарейного отсека (105) обеспечивают ток от 2500 мА/ч до 5000 мА/ч и напряжение от 1,2 В до 5 В, для создания единого блока с напряжением от 9,5 до 12 В при токе от 18000 мА/ч до 22000 мА/ч.
32. Инструмент по п.1, отличающийся тем, что внешняя структура каждого из блоков (1, 2 и 3) состоит из двух опорных дисков (101, 209 и 309) и металлического корпуса (102, 210 и 310), который является полой металлической трубой с гомокинетическими соединениями (103, 211), через которые проходят схемы внутренних соединений между блоками.
33. Инструмент по п.32, отличающийся тем, что каждый из блоков (1, 2, 3) содержит внешние контакты для соединения с землей (104, 208, 308), которые во время движения инструмента отводят статическое электричество, которое может возникнуть от трения.
34. Инструмент по п.33, отличающийся тем, что каждый из блоков (1, 2, 3) содержит также входные и выходные клапаны (107, 201, 311) для ввода и вывода азота или инертного газа, который вытесняет воздух из блока, чтобы создать инертную атмосферу для безопасной работы инструмента.
35. Инструмент по п.1, отличающийся тем, что блок магнитных датчиков (3) дополнительно содержит ультразвуковое устройство и устройство визуального распознавания.
36. Инструмент по п.35, отличающийся тем, что ультразвуковое устройство имеет передатчик и приемник сверхзвуковых волн, а устройство визуального распознавания имеет инфракрасную камеру.
37. Инструмент по п.35, отличающийся тем, что инструмент соединен с устройством визуального распознавания (4) через плату управления (205), для передачи информации, полученной во время движения инструмента через трубу, с программным обеспечением, содержащимся в указанном устройстве визуального распознавания (4), для декодирования и визуализации результатов инспекции.
| ВНУТРИТРУБНЫЙ МАГНИТНЫЙ ДЕФЕКТОСКОП | 2000 |
|
RU2176082C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| МАГИСТРАЛЬНЫЙ ПРОХОДНОЙ МАГНИТНЫЙ ДЕФЕКТОСКОП | 2006 |
|
RU2303779C1 |
| СНАРЯД-ДЕФЕКТОСКОП ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ В СТЕНКАХ ВНУТРИ ТРУБОПРОВОДА | 2003 |
|
RU2265816C2 |
| US 4439730 A, 27.03.1984. | |||

