ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к аэрокосмической отрасли, и более конкретно к системе и способу стыковки космических кораблей.
Описание известного уровня техники
Космическая система стыковки позволяет соединять два космических корабля на космической орбите, будучи выполненной в совокупности в конструкции, и может широко применяться на космических станциях, космических лабораториях, в космической связи, на удаленных платформах обнаружения и других крупномасштабных объектах в области направляющих в сборе, переработки, пополнения запасов, поддержки и спасательных операций в космосе. Например, космический корабль «Шэньчжоу-10» и «Тяньгун-1» могут быть жестко соединены посредством системы стыковки, так что астронавт может войти в экспериментальную кабину «Тяньгун-1» из космического корабля «Шэньчжоу» через стыковочный канал.
Большинство систем стыковки обеспечиваются механической конструкцией, которая включает замыкающие механизмы, замыкающие крюки и другие механизмы. В общем существует два способа соединения двух космических кораблей: стыковка и причаливание. Операция стыковки происходит, когда преследующий космический корабль (такой как космический корабль «Шэньчжоу») входит в диапазон огибающей зоны захвата под автономным управлением маневром и производит контакт с системой стыковки целевого космического корабля (такого как «Тяньгун-1»). Операция причаливания происходит, когда внешнее соединительное устройство (такое как удаленная система, т. е. RMS), установленное на космическом корабле (таком как космическая станция), соединяется с другим космическим кораблем (таким как японский беспилотный грузовой корабль), который заводят манипуляторами в зону захвата и приводят в контакт с системой стыковки космической станции. Операции как стыковки, так и причаливания требуют наличия стыковочного устройства на обоих космических кораблях, так чтобы соединять два стыковочных устройства.
Следующие описания демонстрируют основные состояния в любом из процессов стыковки. Во-первых, имеется состояние приближения. Преследующий космический корабль заходит в диапазон условий начального контакта для стыковки. Условия начального контакта для стыковки определяются как предварительно заданная область, окружающая стыковочное устройство. Перед выполнением операций стыковки или причаливания космический корабль необходимо завести в такую область. Во-вторых, имеется состояние заведения в выравнивание. Стыковочные кольца двух космических кораблей направляют и выравнивают. Два космических корабля сближают друг с другом. В операциях стыковки стыковочные кольца приводят в выравнивание пассивно. Альтернативно для повторного выравнивания может быть использовано калибровочное смещение с визуальным оповещением RMS. В-третьих, имеется состояние захвата, в котором гибкое соединение реализуют посредством смыкания вместе двух соседствующих космических кораблей с помощью захватного устройства, такого как захватные замки. В-четвертых, имеется буферное состояние. Энергия относительного движения и остаточное относительное движение между двумя космическими кораблями абсорбируются и поглощаются системой стыковки. В-пятых, имеется состояние притягивания. Два космических корабля притягивают друг к другу с помощью активного стыковочного устройства. И точное выравнивание выполняют посредством направляющего штифта, установленного на верхней поверхности стыковочной рамы. Наконец, имеется состояние жесткого соединения. Когда стыковочные рамы двух космических кораблей находятся в близком положении, конструкционный замок срабатывает, выполняет жесткое соединение и обеспечивает усилие жесткого соединения и уплотнительное усилие для двух стыковочных поверхностей, таким образом завершая уплотнение стыковочного канала.
Система стыковки китайского космического корабля «Шэньчжоу» представляет собой систему стыковки электромеханического дифференциального типа, в которой применяется движущаяся часть моторного приводного механизма и поглощение энергии импульса выполняется за счет множества буферов, имеющих форму пружин и электромагнитных устройств. Система стыковки может быть пассивно приспособлена поглощать энергии буферизации столкновения во всех направлениях в соответствии с фактической величиной кинетической энергии в разных направлениях смещения. Однако такая система стыковки является чрезмерно сложной. При этом, что касается дифференциального устройства, уже имеется более трех сотен зубчатых передач, что дает чрезвычайно большое количество компонентов в цепи трансмиссии. По существу инерция системы увеличивается и эффективность буферизации уменьшается. В то же время вес и стоимость производства также сильно увеличиваются. В NASA предложили систему стыковки, основанную на замкнутом контуре управления с обратной связью по усилию. Для замкнутого контура управления используется цифровое устройство управления. В таких условиях растяжение, натяжение, коррекция и поглощение энергии импульса захватного кольца возлагаются на устройство управления и шарико-винтовые передачи, сервомоторы, фотоэлектрические датчики, датчики усилия и вращающего момента и могут выполняться автоматически. Однако в такой системе применяется высокоточный датчик усилия, в котором требования реального времени к устройству управления являются крайне сложными. Кроме того, уход датчика усилия может обернуться против процесса стыковки и даже приводить к колебаниям во время буферного процесса.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Для преодоления вышеупомянутых недостатков настоящее изобретение предусматривает систему стыковки космических кораблей, содержащую активное стыковочное устройство и пассивное стыковочное устройство. Активное стыковочное устройство содержит активное стыковочное кольцо и стыковочную раму. Активное стыковочное устройство дополнительно содержит три набора буферных механизмов, причем каждый набор буферных механизмов содержит главный буфер, два гаечно-винтовых узла и авто-дифференциальный буфер, при этом верхний конец и нижний конец гаечно-винтового узла с возможностью перемещения соединены с активным стыковочным кольцом и стыковочной рамой соответственно.
Два гаечно-винтовых узла в каждом наборе одновременно приводятся в действие и растягиваются главным буфером, при этом два гаечно-винтовых узла также соединены друг с другом посредством авто-дифференциального буфера, и два гаечно-винтовых узла выполнены с возможностью относительного регулирования и растяжения посредством авто-дифференциального буфера.
В одном альтернативном варианте осуществления настоящего изобретения нижние концы шести гаечно-винтовых узлов равномерно распределены по стыковочной раме, при этом гаечно-винтовые узлы соединены с активным стыковочным кольцом посредством авто-дифференциального буфера, и три авто-дифференциальных буфера равномерно распределены по активному стыковочному кольцу на его периферии.
В одном альтернативном варианте осуществления настоящего изобретения главный буфер содержит мотор главного буфера и компоненты трансмиссии главного буфера, при этом два гаечно-винтовых узла в каждом наборе приводятся в действие соответствующим мотором главного буфера посредством компонентов трансмиссии главного буфера.
В одном альтернативном варианте осуществления настоящего изобретения главный буфер дополнительно содержит круговой датчик положения, который приспособлен регистрировать угол вращательного движения, выдаваемого компонентами трансмиссии главного буфера или мотором главного буфера.
В одном альтернативном варианте осуществления настоящего изобретения авто-дифференциальный буфер содержит два зубчатых колеса и промежуточную шестерню, при этом каждое зубчатое колесо соединено с одним из гаечно-винтовых узлов, два зубчатых колеса связаны с одной и той же промежуточной шестерней, и промежуточная шестерня дополнительно находится под управлением авто-дифференциального приводного устройства.
В одном варианте осуществления авто-дифференциальное приводное устройство содержит мотор авто-дифференциального буфера и/или пружинную структуру, и/или демпфер, и/или фрикционную муфту.
В одном варианте осуществления авто-дифференциальное приводное устройство соединено со связанной промежуточной шестерней посредством ускорительного или тормозного устройства.
В одном альтернативном варианте осуществления настоящего изобретения каждый набор буферных механизмов дополнительно содержит главную фрикционную муфту, при этом главный буфер заставляет гаечно-винтовые узлы растягиваться и сокращаться только когда главная фрикционная муфта не проскальзывает, причем главная фрикционная муфта приспособлена иметь до захвата такой вращающий момент фрикционной муфты, который меньше, чем вращающий момент фрикционной муфты после выполнения захвата, и при этом главная фрикционная муфта будет проскальзывать, когда ее вращающий момент фрикционной муфты превышен.
В одном альтернативном варианте осуществления настоящего изобретения каждый набор буферных механизмов дополнительно содержит вспомогательную фрикционную муфту буфера, при этом авто-дифференциальный буфер заставляет гаечно-винтовые узлы выполнять относительное растяжение и сокращение только когда вспомогательная фрикционная муфта буфера проскальзывает, причем вспомогательная фрикционная муфта буфера приспособлена иметь до захвата такой вращающий момент фрикционной муфты, который меньше, чем вращающий момент фрикционной муфты после выполнения захвата, и при этом вспомогательная фрикционная муфта буфера будет проскальзывать, когда ее вращающий момент фрикционной муфты превышен.
В одном альтернативном варианте осуществления настоящего изобретения вращающий момент фрикционной муфты главной фрикционной муфты и вспомогательной фрикционной муфты буфера является связанным с напряжением, подаваемым на главную фрикционную муфту и вспомогательную фрикционную муфту буфера.
В одном альтернативном варианте осуществления настоящего изобретения каждый набор буферных механизмов дополнительно содержит датчик смещения винта для регистрации смещения растяжения и сокращения гаечно-винтовых узлов и/или авто-дифференциальный датчик винта для регистрации разницы между смещениями растяжения и сокращения двух гаечно-винтовых узлов в одном и том же наборе, при этом главным буфером и авто-дифференциальным буфером управляют в соответствии с данными, полученными датчиком смещения винта и/или авто-дифференциальным датчиком винта, тем самым удовлетворяя требованиям перемещения в процессе стыковки.
В одном альтернативном варианте осуществления настоящего изобретения главный буфер выполнен для управления движением растяжения и сокращения гаечно-винтовых узлов посредством вращательного движения, авто-дифференциальный буфер выполнен для осуществления регулирования движений относительного растяжения и сокращения двух гаечно-винтовых узлов посредством вращательного движения, и поворотный датчик положения, потенциометр или круговой датчик положения применяются для реализации датчика смещения винта и/или авто-дифференциального датчика винта.
В одном альтернативном варианте осуществления настоящего изобретения гаечно-винтовой узел содержит винт, гайку и передаточный механизм, при этом гайка приводится во вращение главным буфером посредством передаточного механизма, винт соответствует гайке, регулируемое растяжение и сокращение выполняют посредством вращения гайки, винт соединен с активным стыковочным кольцом, и два винта в одном и том же наборе выполнены для регулирования поправки своих относительных растяжения и сокращения посредством авто-дифференциального буфера.
Система стыковки космических кораблей дополнительно содержит устройство управления, при этом главный буфер выполнен для управления движением растяжения и сокращения гаечно-винтовых узлов посредством вращательного движения, авто-дифференциальный буфер выполнен для осуществления регулирования движений относительного растяжения и сокращения двух гаечно-винтовых узлов посредством вращательного движения, и поворотный датчик положения применяется для реализации датчика смещения винта и/или авто-дифференциального датчика винта.
Система стыковки космических кораблей дополнительно содержит устройство управления, причем устройство управления управляет главным буфером и авто-дифференциальным буфером в соответствии с зарегистрированным состоянием растяжения и сокращения гаечно-винтовых узлов для удовлетворения требований к движению стыковочного процесса.
Настоящее изобретение дополнительно предусматривает способ стыковки космических кораблей, который применяет систему стыковки космических кораблей согласно альтернативным вариантам осуществления настоящего изобретения и включает следующие этапы:
S1: главный буфер и/или авто-дифференциальный буфер переводят в режим захвата, и шесть гаечно-винтовых узлов приводят в действие посредством трех главных буферов так, что выталкивается активное стыковочное кольцо;
S2: после того как активное стыковочное кольцо вступает в контакт с пассивным стыковочным устройством, активное стыковочное кольцо отклоняется под усилием взаимодействия, и гаечно-винтовые узлы приводятся в действие и отталкиваются главным буфером в соответствии с данными о растяжении и сокращении гаечно-винтовых узлов, снятыми с главного буфера и/или авто-дифференциального буфера, так, чтобы реализовывать соответствующее направление и выравнивание;
S3: активное стыковочное кольцо и пассивное стыковочное кольцо пассивного стыковочного устройства гибко соединяют посредством захватного устройства, расположенного на них, после выполнения гибкого соединения главный буфер и/или авто-дифференциальный буфер переводят в буферный режим и запускают захватное сенсорное устройство, переходя к этапу S4 или S5;
S4: в соответствии с данными о растяжении и сокращении гаечно-винтовых узлов, снятыми с главного буфера и/или авто-дифференциального буфера, положением растяжения и сокращения гаечно-винтовых узлов управляют посредством главного буфера и/или авто-дифференциального буфера так, чтобы достигать его желаемого положения, при этом положение растяжения и сокращения двух гаечно-винтовых узлов в одном и том же наборе является идентичным; затем осуществляют переход к этапу S6;
S5: два гаечно-винтовых узла выталкиваются в предельное положение, таким образом выполняя вынужденную коррекцию стыковочного кольца; затем осуществляют переход к этапу S6;
S6: активное стыковочное устройство и пассивное стыковочное устройство притягивают ближе с получением точного выравнивания;
S7: выполняют жесткое соединение и уплотнение.
При этом приводная способность главного буфера и авто-дифференциального буфера в буферном режиме больше, чем приводная способность главного буфера и авто-дифференциального буфера в режиме захвата.
В одном альтернативном варианте осуществления настоящего изобретения каждый набор буферных механизмов дополнительно содержит главную фрикционную муфту и вспомогательную фрикционную муфту буфера, причем главный буфер заставляет гаечно-винтовые узлы растягиваться и сокращаться только когда главная фрикционная муфта не проскальзывает, при этом авто-дифференциальный буфер заставляет гаечно-винтовые узлы выполнять относительное растяжение и сокращение только когда вспомогательная фрикционная муфта буфера проскальзывает.
В соответствии с системой и способом стыковки, предусмотренными настоящим изобретением, благодаря внедрению группового управления и авто-дифференциального буфера для осуществления управления не требуется каких-либо датчиков усилия. В дополнение устраняется необходимость в вычислении точных решений для платформы Стюарта, и в системе управления достигается управление с мгновенной обратной связью.
При применении настоящего изобретения преимуществом является не только эффективная буферизация ударной нагрузки во время процесса стыковки, но также и реализация стыковки и отстыковки с разными целевыми показателями качества стыковки посредством изменения вращающего момента фрикционной муфты на орбите, а также рабочей скорости моторного приводного устройства. Также осуществляется дополнительная стыковка с существующим пилотируемым космическим кораблем. Решение согласно настоящему изобретению является простым, а значит обладает преимуществами, заключающимися в надежности работы, легком весе, большой экономности и универсальности.
В патенте ZL201210489374.5 раскрыта система стыковки с однородной жесткостью и замкнутым контуром управления демпфированием с обратной связью. В нем применяется линейный приводной механизм, имеющий реверсивную передачу, и буферное демпфирующее усилие реализуется посредством мотора с шестью линейными приводными устройствами, работающего в соответствии с предварительно заданным алгоритмом управления. Система не оснащается какими-либо встроенными высокоточными датчиками усилия, так что сложность системы понижается. Однако система требует выполнения операций нахождения точных решений для платформы Стюарта, и следовательно требующийся объем расчетов является очень большим. Также независимое приведение в действие шести линейных приводных устройств обладает недостатками, такими как малые углы захвата и т. д.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Сопроводительные графические материалы представлены для обеспечения лучшего понимания настоящего изобретения, и включены в это техническое описание и составляют его часть. На графических материалах представлены варианты осуществления настоящего изобретения, и вместе с описанием они служат цели объяснения принципов настоящего изобретения. На графических материалах:
Фиг. 1 представляет собой схематический вид активного стыковочного устройства согласно одному варианту осуществления настоящего изобретения.
Фиг. 2 представляет собой схематический вид пассивного стыковочного устройства согласно одному варианту осуществления настоящего изобретения.
Фиг. 3 представляет собой функциональную схему буферного механизма согласно одному варианту осуществления настоящего изобретения.
Фиг. 4 представляет собой схематический вид гаечно-винтового узла согласно одному варианту осуществления настоящего изобретения.
Фиг. 5 представляет собой схему системы координат активного стыковочного устройства согласно одному варианту осуществления настоящего изобретения.
Фиг. 6 представляет собой график кривой зависимости вращающего момента от угла поворота авто-дифференциального буфера при постоянной угловой скорости и при определенном указанном алгоритме управления согласно одному варианту осуществления настоящего изобретения.
Фиг. 7 представляет собой график эквивалентной эффективности стыковочного кольца в направлении Y и при определенном указанном алгоритме управления согласно одному варианту осуществления настоящего изобретения.
Фиг. 8 представляет собой функциональную схему буферного механизма согласно другому варианту осуществления настоящего изобретения.
Фиг. 9 представляет собой схему мотора главного буфера и главной фрикционной муфты, реализованной посредством планетарного замедляющего механизма передачи, согласно другому варианту осуществления настоящего изобретения.
Фиг. 10 представляет собой график кривой нагрузочной характеристики механизма цилиндрической пружины согласно другому варианту осуществления настоящего изобретения.
Фиг. 11 представляет собой график эквивалентной эффективности стыковочного кольца в направлении Y согласно другому варианту осуществления настоящего изобретения.
Фиг. 12 представляет собой график эквивалентной эффективности стыковочного кольца в направлении тангажа согласно другому варианту осуществления настоящего изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже приводится подробная ссылка на предпочтительные варианты осуществления настоящего изобретения, примеры которых проиллюстрированы на сопроводительных графических материалах. По возможности, для обозначения одинаковых или похожих деталей на графических материалах и в описании используются одинаковые ссылочные позиции.
Смотрите фиг. 1 – фиг. 12, на которых представлены варианты осуществления настоящего изобретения. Система и способ стыковки космических кораблей, предусмотренные настоящим изобретением, будут подробно описаны ниже со ссылками на фиг. 1 – фиг. 12. При этом варианты осуществления, описанные ниже, снабжены иллюстрациями, чтобы продемонстрировать техническое содержимое и характеристики настоящего изобретения и чтобы предоставить возможность специалистам в данной области техники понять, осуществить и применить настоящее изобретение. Однако следует отметить, что они не предназначены для ограничения объема настоящего изобретения. Поэтому любые эквивалентные модификации или изменения согласно идеям настоящего изобретения также должны входить в объем настоящего изобретения.
Вариант осуществления 1
Смотрите фиг. 1 – фиг. 7. Настоящее изобретение предусматривает систему стыковки космических кораблей, содержащую активное стыковочное устройство 100 и пассивное стыковочное устройство 200. Пассивное стыковочное устройство 200 расположено на целевом космическом корабле, и компоненты пассивного стыковочного устройства 200 упрощены в сравнении с активным стыковочным устройством, с сохранением таким образом лишь стыковочных колец, жестких соединительных устройств, устройства управления и т. д.
Активное стыковочное устройство 100 содержит активное стыковочное кольцо и стыковочную раму. Активное стыковочное устройство дополнительно содержит множество захватных замков 103, систему 105 конструкционных замков и стыковочную раму 104. Пассивное стыковочное устройство 200 дополнительно содержит пассивное стыковочное кольцо 201, плиту 202 и т. д.
Активное стыковочное кольцо 101 содержит множество лепестков, и захватный замок 103 расположен на каждом лепестке активного стыковочного кольца 101. Захватный замок 103 выполнен с возможностью сцепления с плитой 202 пассивного стыковочного устройства 200, находящегося напротив, для захватывания. Также может применяться электромагнитный захватный механизм.
Согласно указанному варианту осуществления настоящего изобретения активное стыковочное устройство 100 дополнительно содержит три набора буферных механизмов, и каждый набор буферных механизмов 102 содержит главный буфер, два гаечно-винтовых узла 303 и авто-дифференциальный буфер. Верхний конец и нижний конец гаечно-винтового узла 303 с возможностью перемещения соединены с активным стыковочным кольцом 101 и стыковочной рамой 104 соответственно.
Два гаечно-винтовых узла 303 в каждом наборе одновременно приводятся в действие и растягиваются одним главным буфером. Два гаечно-винтовых узла 303 также соединены друг с другом посредством авто-дифференциального буфера. В результате два гаечно-винтовых узла 303 можно относительно регулировать и растягивать посредством авто-дифференциального буфера.
В одном альтернативном варианте осуществления настоящего изобретения количество лепестковых конструкций активного стыковочного кольца 101, захватных замков 103, буферных механизмов 102 и плит 202 равно трем или же может быть равно четырем или даже более. Что касается активного стыковочного кольца, электромагнитного захватного механизма, системы конструкционных замков и т. д., поскольку они были полностью описаны в патенте ZL201210489374.5, здесь они заново не поясняются. В отношении этого патента могут даваться и пониматься ссылки.
В одном предпочтительном варианте осуществления настоящего изобретения, см. фиг. 1, нижние концы шести гаечно-винтовых узлов 303 равномерно распределены по стыковочной раме 104, при этом гаечно-винтовые узлы 303 соединены с активным стыковочным кольцом 101 посредством авто-дифференциального буфера, и три авто-дифференциальных буфера равномерно распределены по активному стыковочному кольцу 101 на его периферии.
Мотор 301 главного буфера и гаечно-винтовой узел 303 расположены на внутреннем фланце стыковочной рамы 104 посредством опорной конструкции. Мотор 302 авто-дифференциального буфера расположен на стыковочном кольце 101 посредством опорной конструкции. Таким образом, стыковочное кольцо 101 и стыковочная рама 104 структурно соединены шестью винтами 318 так, чтобы образовывать платформу Стюарта с 6 степенями свободы.
Описание главного буфера
В одном варианте осуществления настоящего изобретения главный буфер содержит мотор 301 главного буфера и компоненты трансмиссии главного буфера. Два гаечно-винтовых узла 303 в каждом наборе приводятся в действие соответствующим мотором 301 главного буфера посредством компонентов трансмиссии главного буфера. Компоненты трансмиссии главного буфера в основном содержат вал 313 главного буфера; в дополнительном альтернативном варианте осуществления настоящего изобретения роторный выходной вал мотора 301 главного буфера является соосным валу 313 главного буфера и прямо соединен с ним. Для лучшей надежности и способности буферизации моторы 301 главных буферов также необязательно могут использоваться последовательно.
Главный буфер дополнительно содержит круговой датчик положения, который приспособлен регистрировать угол вращательного движения, выдаваемого компонентами трансмиссии главного буфера или мотором 301 главного буфера. Круговой датчик положения может использоваться для измерения угла вала 313 главного буфера при вращении. Отдельный датчик измерения угла также может быть использован посредством размещения определенных звеньев трансмиссии так, чтобы передавать вращательное движение вала 313 главного буфера на датчик измерения угла. Датчик измерения угла может быть выбран, помимо прочего, из кругового датчика положения, преобразователя координат, потенциометра и т. д., в зависимости от ситуации, когда удовлетворяет требуемой точности измерений.
В дополнение мотор 301 главного буфера должен обладать тормозной блокирующей функцией без увеличения потребления мощности, обеспечивающей функцию удержания стыковочного кольца 101 в отведенном состоянии. В других альтернативных вариантах осуществления настоящего изобретения, когда мотор 301 главного буфера не обладает такой блокирующей функцией, тормозное устройство также может быть расположено на вале 313 главного буфера, и тормозное устройство может быть реализовано в общем механизме. По существу, после того как мотор 301 главного буфера включается, тормозное устройство разблокирует степень свободы вращения вала 313 главного буфера.
Описание авто-дифференциального буфера
В одном варианте осуществления настоящего изобретения авто-дифференциальный буфер содержит два зубчатых колеса 305, 306 и промежуточную шестерню 304. Каждое зубчатое колесо 305 или 306 соединено с гаечно-винтовым узлом 303, и два зубчатых колеса связаны с одной и той же промежуточной шестерней 304. Промежуточной шестерней 304 также можно управлять посредством авто-дифференциального приводного устройства.
В дополнительном альтернативном варианте осуществления настоящего изобретения авто-дифференциальное приводное устройство содержит мотор авто-дифференциального буфера и/или пружинную структуру, и/или демпфер, и/или фрикционную муфту. Авто-дифференциальное приводное устройство соединено со связанной промежуточной шестерней посредством ускорительного или тормозного устройства.
В случае применения мотора авто-дифференциального буфера мотор 302 авто-дифференциального буфера соединен с промежуточной шестерней 304. Шестерня 304 взаимодействует с зубчатыми колесами 305 и 306, соответственно, и все три могут вращаться одновременно. В данном варианте осуществления настоящего изобретения мотор 302 авто-дифференциального буфера соединен со связанной промежуточной шестерней 304. Альтернативно мотор 302 авто-дифференциального буфера может быть соединен с зубчатым колесом 305 или зубчатым колесом 306, или же ускорительное или тормозное устройство могут быть добавлены между мотором 302 и зубчатым колесом 305 или зубчатым колесом 306, или несколько моторов могут быть выборочно соединены с вышеупомянутыми зубчатыми колесами. С помощью мотора 302 авто-дифференциального буфера промежуточной шестерней 304 можно управлять так, чтобы вращать соответственно согласно требуемой величине относительного растяжения или сокращения. Внутренняя часть мотора 302 авто-дифференциального буфера содержит круговой датчик положения, который может быть использован для измерения угла поворота промежуточной шестерни 304. Альтернативно отдельный датчик измерения угла также может быть использован посредством размещения определенных звеньев трансмиссии так, чтобы передавать вращательное движение вала 313 главного буфера или промежуточной шестерни 304 на датчик измерения угла. Датчик измерения угла может быть выбран, помимо прочего, из кругового датчика положения, преобразователя координат, потенциометра и т. д., в зависимости от ситуации, когда удовлетворяет требуемой точности измерений.
Мотор 302 авто-дифференциального буфера используется для авто-дифференциальной буферизации и коррекции одного и того же набора винтов и является независимым от выталкивания и отхождения стыковочного кольца 101. Поэтому мотор авто-дифференциального буфера также можно заменить комбинацией пружинного механизма и демпфера или любым одним из них. Когда мотор заменяется только с помощью демпферного механизма, длина винтов в одном и том же наборе не может автоматически достигать коррекции равной длины. Мотор 301 главного буфера должен толкать активное стыковочное кольцо 101 в предельное положение, приводя шесть винтов к равной длине, чтобы корректировать стыковочное кольцо. Демпферы, фрикционные муфты и т. п. также, к примеру, могут представлять собой, помимо прочего, электромагнитные механизмы сцепления, магнитореологические демпферы, гистерезисные муфты или электромеханические устройства управления.
В связи с вышеупомянутым поворотным датчиком положения, можно считать, что согласно вариантам осуществления настоящего изобретения каждый набор буферных механизмов дополнительно содержит датчик смещения винта для обнаружения смещения растяжения и сокращения гаечно-винтовых узлов и/или авто-дифференциальный датчик винта для обнаружения разницы между смещениями растяжения и сокращения двух гаечно-винтовых узлов в одном и том же наборе. Главным буфером и авто-дифференциальным буфером управляют в соответствии с данными, полученными датчиком смещения винта и/или авто-дифференциальным датчиком винта, таким образом удовлетворяя требованиям перемещения в процессе стыковки.
В вышеупомянутых вариантах осуществления, поскольку главный буфер выполнен для управления движением растяжения и сокращения гаечно-винтовых узлов посредством вращательного движения, авто-дифференциальный буфер выполнен с возможностью осуществления регулирования движения относительного растяжения и сокращения двух гаечно-винтовых узлов посредством вращательного движения. Поворотный датчик положения применяется для реализации датчика смещения винта и/или авто-дифференциального датчика винта.
Описание гаечно-винтового узла 303
Гаечно-винтовой узел содержит винт 308, гайку 307 и передаточный механизм. Гайка 307 может представлять собой зубчатую гайку, которая приводится во вращение главным буфером посредством передаточного механизма. Винт 308 соответствует гайке 307, и регулируемое растяжение и сокращение осуществляются вследствие вращения гайки 307. Винт 308 соединен с активным стыковочным кольцом 101, и два винта 308 в одном и том же наборе применяются для регулирования их поправки относительного растяжения и сокращения посредством авто-дифференциального буфера. В одном альтернативном варианте осуществления настоящего изобретения винт 308 и гайка 307 относятся к обычному типу шариковой винтовой пары. Когда гайка 308 вращается, винт 307 соответственно линейно вытягивается и отходит по гайке 308.
Путем надлежащего проектирования ходового процесса винта 307 винт 307 и гайка 308 могут обладать замечательной плавностью перемещения, обеспечивая возможность передней и обратной передачи. То есть, перемещение, выдаваемое вращением гайки 308, может вызывать растяжение и сокращение винта 307. Альтернативно может просто осуществляться осевое перемещение винта 307, и это приводит к обратному вращению гайки 308, тем самым обеспечивая сокращение между винтом 307 и гайкой 308.
Два винта в одном и том же наборе соответственно представляют собой винт с левой резьбой и винт с правой резьбой, так что когда вал 313 главного буфера вращается, один и тот же набор винтов 307 растягивается или сокращается в одном и том же направлении посредством передаточного механизма. Разумеется, два винта в одном и том же наборе могут также быть реализованы с одинаковым направлением вращения. В этом случае взаимосвязь с передаточным механизмом необходимо приспособить для обеспечения одного и того же направления растяжения и сокращения двух винтов.
Гайка 308 соединена с валом 313 главного буфера посредством конических зубчатых колес 309~312. Благодаря конструкции конических зубчатых колес 309~312 гаечно-винтовой узел 303 можно вращать в двух измерениях вокруг нижней точки поворота. Фиг. 4 представляет собой изображение варианта осуществления согласно настоящему изобретению с особой конструктивной схемой. Как показано на фиг. 4, конструктивная рама 315 закреплена на стыковочной раме 104, и вращающаяся рама 314 соединена с конструктивной рамой 315 посредством вращающегося вала для осуществления одномерного вращения. Коническое зубчатое колесо 311 закреплено на одном конце вращающегося вала рамы 314. На другой стороне рамы 314 гаечная рама 316 и зубчатое колесо 309 соединены тем же вращающимся валом, и все три могут приводиться в относительное вращение. Трансмиссия конического зубчатого колеса 309 и гайки 308 приводится в действие посредством конической формы.
Верхняя часть винта 308 соединена с зубчатыми колесами 305, 306 посредством универсального шарнира, соответственно, и винт 308 и зубчатые колеса 305 или 306 могут вращаться одновременно. Таким образом, имеется три степени свободы вращения между винтом 307 и стыковочным кольцом 101. Коническое зубчатое колесо 312 соединено с валом 313 главного буфера посредством универсального шарнира, и эти универсальные шарниры используются для передач в разных валах между каждым передаточным валом. Считается, что в случае обеспечения соосности между передаточными валами для трансмиссии также можно приспособить соединительный механизм или т. п. В дополнение эластичное звено может быть добавлено на верхний конец винта 307, такое как пружина сжатия предварительной затяжки для буферизации осевой ударной нагрузки более крупного ходового винта.
Буферный механизм 102 образует замкнутую приводную цепь так, что стыковочное кольцо 101 и стыковочная рама 104 образуют платформу Стюарта с 6 степенями свободы посредством структурного соединения шести винтов 307.
Система стыковки космических кораблей дополнительно содержит устройство управления, причем устройство управления управляет главным буфером и авто-дифференциальным буфером в соответствии с зарегистрированным состоянием растяжения и сокращения гаечно-винтовых узлов 303 для удовлетворения требований к движению стыковочного процесса. Кроме того, главный буфер применяется для осуществления растяжения и сокращения гаечно-винтового узла 303 посредством вращательного движения, и авто-дифференциальный буфер применяется для регулирования относительных поправок растяжения и сокращения двух гаечно-винтовых узлов посредством вращательного движения.
Устройство управления управляет главным буфером и авто-дифференциальным буфером в соответствии с данными об угле поворота, снимаемыми с главного буфера и авто-дифференциального буфера и связанными с растяжением и сокращением гаечно-винтового узла 303, так, чтобы удовлетворять требованиям к движению стыковочного процесса.
Механизм работы устройства управления является следующим.
Устройство управления соединено с мотором 301 главного буфера и мотором 302 авто-дифференциального буфера, и устройство управления может быть расположено на стыковочной раме 104 или внутри кабины космического корабля в зависимости от разных прикладных требований.
До процесса стыковки устройство управления управляет мотором 301 главного буфера и мотором 302 авто-дифференциального буфера так, чтобы создавать определенный удерживающий момент. После того как стыковочные кольца двух космических кораблей входят в механический контакт при начальных условиях, устройство 106 управления приводит в действие мотор 301 главного буфера, чтобы вытягивать активное стыковочное кольцо 101, и активное стыковочное кольцо 101 преследующего космического корабля подвергается воздействию стыковочного усилия, так что на мотор 301 главного буфера и мотор 302 авто-дифференциального буфера воздействует трансмиссия винта и зубчатого колеса. Под таким воздействием стыковочного усилия мотор 301 главного буфера начинает тормозить или ускоряться. Устройство управления управляет максимальным выходным вращающим моментом мотора 301 главного буфера, приводя его к предопределенной величине посредством регулирования рабочего тока. Когда противодействующий вращающий момент, прикладываемый к мотору 301 главного буфера, превышает его максимальный выходной вращающий момент, мотор 301 главного буфера может быть заблокирован или переведен в противоположное вращение (т. е., стыковочное усилие воздействует на мотор 301 так, что мотор начинает вращаться из переднего направления назад в противоположном направлении).
Когда вращающий момент, прикладываемый к мотору 301 главного буфера стыковочным усилием, по направлению является равным направлению выходной мощности мотора 301 главного буфера, мотор 301 главного буфера демонстрирует ускоренное вращение. Устройство управления предварительно устанавливает максимальный предел скорости мотора 301 главного буфера. Когда мотор 301 главного буфера приближается к своему пределу скорости, устройство 106 управления выполняет торможение мотора 301 главного буфера посредством ослабления силы тока или обращения направления тока, или т. п. Активное стыковочное кольцо 101 пассивно создает отклонения положения и ориентации. Под воздействием стыковочного усилия винты 307 в одном и том же наборе создают разность длины, которая вызывает вращение промежуточной шестерни 304 против удерживающего момента мотора 302 авто-дифференциального буфера. Когда промежуточная шестерня 304 создает углы поворота, устройство управления регулирует вращающий момент и направление мотора 302 авто-дифференциального буфера в реальном времени. Разумеется, когда мотор авто-дифференциального буфера заменен пружинной структурой, демпфером или т. п., поправки могут также выполняться самостоятельно без управления устройством управления.
Когда устройство управления определяет, что два стыковочных кольца космических кораблей соединены и приспособлены для захвата, устройство управления изменяет алгоритм управления мотора 301 главного буфера и мотора 302 авто-дифференциального буфера, и устройство 106 управления собирает сигналы с круговых датчиков положения мотора 301 главного буфера и мотора 302 авто-дифференциального буфера, чтобы вычислить соответствующие величины углов поворота. В соответствии с этими вычисленными величинами устройство управления управляет мотором 301 главного буфера и мотором 302 авто-дифференциального буфера так, чтобы перемещать винт в предварительно заданное положение по длине согласно предопределенному алгоритму управления, таким образом реализуя буферизацию и корректировку стыковочного кольца.
С другой стороны, настоящее изобретение дополнительно предусматривает способ стыковки космических кораблей, который применяет систему стыковки космических кораблей, описанную выше в настоящем изобретении, и включает следующие этапы:
S1: главный буфер и/или авто-дифференциальный буфер переводят в режим захвата, и шесть гаечно-винтовых узлов 303 приводят в действие посредством трех главных буферов так, что выталкивается активное стыковочное кольцо 101.
В сочетании с системой, упомянутой выше, он может быть более подробно описан так:
Устройство управления подает питание на мотор 301 главного буфера, чтобы реализовать передачу между мотором 301 главного буфера и винтом 308, так, что активное стыковочное кольцо 101 выталкивается в стыковочное положение, и алгоритм управления мотора 301 главного буфера переводят в режим захвата, ожидая стыковки;
С другой точки зрения можно понять, что активное стыковочное кольцо 101 является разблокированным и выталкивается из отведенного состояния в положение готовности к стыковке. Устройство управления подает питание на мотор, в результате чего моторное приводное устройство выталкивает винт в соответствии с предопределенным положением стыковочного кольца. После того как стыковочное кольцо достигает своего правильного места, перемещение останавливают. В таких обстоятельствах устройство управления переводит алгоритм управления мотора в режим захвата в соответствии с характеристиками цели стыковки (в целом в этом режиме максимальный выходной вращающий момент меньше), ожидая стыковки;
S2: после того как активное стыковочное кольцо вступает в контакт с пассивным стыковочным устройством, активное стыковочное кольцо отклоняется под усилием взаимодействия. Гаечно-винтовые узлы приводятся в действие и отталкиваются главным буфером и/или авто-дифференциальным буфером в соответствии с данными о растяжении и сокращении гаечно-винтовых узлов, снятыми с главного буфера и/или авто-дифференциального буфера, так, чтобы реализовывать соответствующее направление и выравнивание;
В сочетании с конструкцией, упомянутой выше, его можно более детально понять так:
Преследующий космический корабль переходит в диапазон начальных условий захвата для стыковки, при этом активное стыковочное устройство и пассивное стыковочное устройство вступают в контакт друг с другом, и главное стыковочное кольцо отклоняется под усилием взаимодействия. По существу устройство управления управляет растяжением и сокращением соответствующего винта посредством мотора в соответствии с сигналами кругового датчика положения мотора. В результате активное стыковочное кольцо соответственно приспосабливают для направления и выравнивания;
Это также можно описать так: преследующий космический корабль переходит в диапазон начальных условий контакта для стыковки, выполняется переход в состояние направляющего выравнивания стыковочного устройства, и направляющие пластины двух космических кораблей входят в контакт. Под таким усилием взаимодействия стыковочное кольцо активного стыковочного устройства отклоняется. После регистрации изменения длины винта система управления подает мощность на моторное приводное устройство, и стыковочное кольцо выталкивается посредством мотора главного буфера, тем самым выполняя направление и выравнивание;
S3: активное стыковочное кольцо и пассивное стыковочное кольцо пассивного стыковочного устройства гибко соединяют посредством захватного устройства, расположенного на них; после выполнения гибкого соединения главный буфер и/или авто-дифференциальный буфер переводят в буферный режим и запускают захватное сенсорное устройство, переходя к этапу S4 или S5;
Другими словами, активное стыковочное кольцо и пассивное стыковочное кольцо гибко соединяют посредством захватного устройства, расположенного на них, для выполнения захватывания; при этом система управления получает сигнал о захватывании и затем переводит алгоритм управления мотора в буферный режим;
Вышеуказанные два этапа также могут быть описаны так: процесс захватывания стыковочного устройства основан на том, что два находящихся рядом стыковочных устройства гибко соединяются посредством механического захвата (такого как режим захвата стыковочного механизма космического корабля «Шэньчжоу») или электромагнитного захвата, и затем запускается захватное сенсорное устройство на стыковочном кольце и таким образом подает сигналы для захватывания;
S4: в соответствии с данными о растяжении и сокращении гаечно-винтовых узлов, снятыми с главного буфера и/или авто-дифференциального буфера, положением растяжения и сокращения гаечно-винтовых узлов управляют посредством главного буфера и/или авто-дифференциального буфера так, чтобы достигать его желаемого положения, при этом положение растяжения и сокращения двух гаечно-винтовых узлов в одном и том же наборе является идентичным; затем осуществляют переход к этапу S6;
S5: два гаечно-винтовых узла выталкиваются в предельное положение, таким образом выполняя вынужденную коррекцию стыковочного кольца; затем осуществляют переход к этапу S6;
В сочетании с устройством, упомянутым выше, он может быть более подробно описан так:
Система управления применяется для растяжения и сокращения винта посредством мотора в соответствии с изменением сигнала кругового датчика положения мотора 301 главного буфера и мотора 302 авто-дифференциального буфера, для достижения желаемого положения винта; альтернативно все винты могут быть вытолкнуты в предельное положение, таким образом выполняя вынужденную коррекцию стыковочного кольца;
Кроме того, это может быть описано так: после обнаружения сигнала о захвате система управления переводит алгоритм управления мотора в буферный режим (выходной вращающий момент в таком режиме больше), и в то же время система управления заставляет каждый винт перемещаться в его предопределенное положение в соответствии с сигналами, снятыми с кругового датчика положения. Во время этого процесса могут происходить движения двигателя, относящиеся к ускорению, торможению, остановке или обращению направления работы и т.д. двигателя. Посредством противоположного усилия, обеспечиваемого стыковочным кольцом, энергия относительного движения и остаточное относительное движение между двумя космическими кораблями абсорбируются и поглощаются; наконец, когда все винты перемещаются так, чтобы иметь одинаковую длину, буферный процесс завершается, и стыковочное кольцо корректируется.
S6: активное стыковочное устройство и пассивное стыковочное устройство притягивают ближе так, чтобы достигать точного выравнивания; а именно, преследующий космический корабль и целевой космический корабль притягивают ближе друг к другу так, чтобы выполнять точное позиционирование; кроме того, активное стыковочное устройство преследующего космического корабля будет притягивать два космических корабля ближе друг к другу, и таким образом точное выравнивание выполняется посредством направления штифта, установленного на верхней поверхности стыковочной рамы;
S7: выполняют жесткое соединение и уплотнение; кроме того, когда стыковочные рамы двух космических кораблей находятся в близком положении, конструкционный замок срабатывает, выполняет жесткое соединение и обеспечивает усилие жесткого соединения и уплотнительное усилие для двух стыковочных поверхностей, таким образом завершая уплотнение стыковочного канала.
При этом приводная способность главного буфера и авто-дифференциального буфера в буферном режиме больше, чем приводная способность главного буфера и авто-дифференциального буфера в режиме захвата.
Фиг. 5 представляет собой схему системы координат активного стыковочного механизма. На фиг. 5 B1~B6 представляют собой нижние точки поворота платформы Стюарта, которые являются центральными точками вращения винта 307 относительно стыковочной рамы 104, тогда как b1~b6 представляют собой верхние точки поворота на платформе Стюарта, которые являются центральными точками вращения винта 307 относительно активного стыковочного кольца 101. L1~L6 представляют собой расстояние между верхними и нижними точками поворота шести винтов.
На фиг. 5 Ou обозначает центр круга, на котором расположены верхние точки b1~b6 поворота на винтах и который закреплен на стыковочном кольце 101. Od обозначает центр круга, на котором расположены нижние точки B1~B6 поворота на винтах. Преобразование из системы координат Ou – Xu Yu Zu в систему координат Od – Xd Yd Zd может быть выполнено посредством преобразования Эйлера Euler(φ ,ψ ,θ ), где ψ – это угол рыскания (вокруг оси Y); θ – это угол тангажа (вокруг оси Z); и φ – это угол крена (вокруг оси X).
В соответствии с теоретической схемой передачи взаимосвязь линейного преобразования между углами поворота моторов 301 трех главных буферов (т. е. валов 313 главных буферов) и длиной изменяется в винтах L1~L6 следующим образом:
 , где
, где
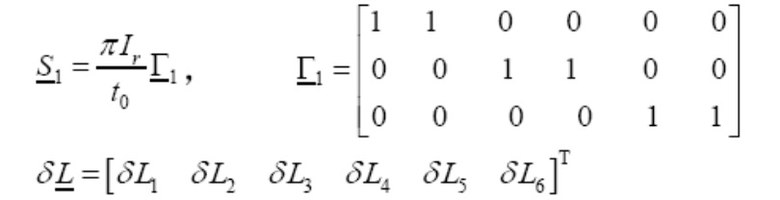
θ m1, θ m2, θ m3 обозначают углы поворота моторов 301 трех главных буферов (т. е. валов 313 главных буферов), и эти углы можно измерить посредством круговых датчиков положения моторов 301 главных буферов;
δLi (i = 1, 2,3,..., 6) обозначает изменения длины винтов;
Ir обозначает вращательное отношение мотора 301 главного буфера к гайке 308;
t0 обозначает ходовой процесс винта 307.
Таким же образом взаимосвязь линейного преобразования между углами поворота моторов 302 авто-дифференциальных буферов и изменениями длины в винтах L1~L6 является следующей:
 , где
, где 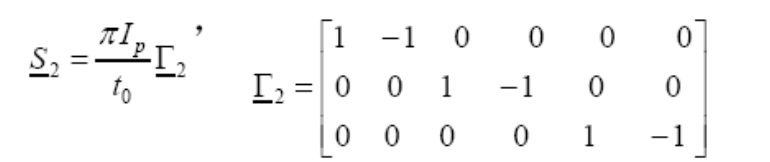
θ s1 , θ s2 , θ s3 обозначают углы поворота трех моторов 302 авто-дифференциальных буферов, и эти углы можно измерить посредством круговых датчиков положения моторов 302 авто-дифференциальных буферов;
Ip обозначает вращательное отношение мотора 302 авто-дифференциального буфера к зубчатому колесу 313;
Из приведенной выше формулы можно сделать вывод, что взаимосвязь между мотором 301 главного буфера, мотором 302 авто-дифференциального буфера и шестью степенями свободы стыковочного кольца является следующей:

где
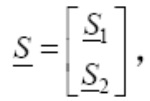
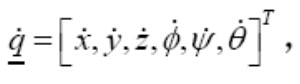
J обозначает матрицу Якоби скорости между движением q с шестью степенями свободы активного стыковочного кольца 101 и изменениями L длины винта.
Определяется, что вращающий момент мотора главного буфера:

где Mm1, Mm2, Mm3 обозначают приводные вращающие моменты мотора 301 главного буфера; Ms1, Ms2, Ms3 обозначают приводные вращающие моменты мотора 302 авто-дифференциального буфера; F обозначает силу шести степеней свободы на стыковочном кольце 101, так называемую эквивалентную силу стыковочного кольца.
Когда стыковочные кольца 101 стыковочных механизмов готовы к стыковке, и определенная постоянная скорость движения прикладывается к стыковочному кольцу 101 в направлении определенной степени свободы, взаимосвязь между усилием/вращающим моментом стыковочного кольца и смещением, демонстрируемым стыковочным кольцом 101, называют эквивалентной эффективностью стыковочного кольца в таком направлении.
В соответствии с матрицей Якоби силы взаимосвязь между вращающим моментом M мотора и эквивалентной силой F стыковочного кольца 101 можно получить следующим образом:
M = JF F,
где JF обозначает матрицу Якоби силы между вращающим моментом мотора и эквивалентной силой стыковочного кольца, и такая матрица может быть получена из соответствующей матрицы Якоби скорости.
Когда вращающий момент M мотора установлен, эквивалентную силу стыковочного кольца можно вычислить на основе вышеуказанной формулы. Таким же образом вращающие моменты M мотора для каждого мотора также можно получить на основе эквивалентной силы стыковочного кольца.
Система 106 управления предварительно определяет алгоритм управления для моторов. Алгоритм управления для мотора 301 главного буфера и мотора 302 авто-дифференциального буфера представляют следующим образом:
 , где i обозначает состояние задачи, устанавливаемое в данном варианте осуществления как 1, 2, которые обозначают состояние коррекции захвата и состояние коррекции буфера соответственно.
, где i обозначает состояние задачи, устанавливаемое в данном варианте осуществления как 1, 2, которые обозначают состояние коррекции захвата и состояние коррекции буфера соответственно.
 обозначает приводной вращающий момент, необходимый мотору 301 j-го главного буфера;
обозначает приводной вращающий момент, необходимый мотору 301 j-го главного буфера;  обозначает приводной вращающий момент, необходимый мотору 302 j-го авто-дифференциального буфера;
обозначает приводной вращающий момент, необходимый мотору 302 j-го авто-дифференциального буфера; 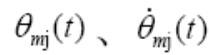 обозначают угол поворота и угловую скорость мотора 301 j-го главного буфера, соответственно;
обозначают угол поворота и угловую скорость мотора 301 j-го главного буфера, соответственно;
 обозначают угол поворота и угловую скорость мотора 302 j-го авто-дифференциального буфера, соответственно;
обозначают угол поворота и угловую скорость мотора 302 j-го авто-дифференциального буфера, соответственно;
 обозначают коэффициент упругости и коэффициент демпфирования мотора 301 главного буфера на i-м состоянии задачи, соответственно;
обозначают коэффициент упругости и коэффициент демпфирования мотора 301 главного буфера на i-м состоянии задачи, соответственно;
 ,
,  обозначают коэффициент упругости и коэффициент демпфирования мотора 302 авто-дифференциального буфера на i-м состоянии задачи, соответственно;
обозначают коэффициент упругости и коэффициент демпфирования мотора 302 авто-дифференциального буфера на i-м состоянии задачи, соответственно;
 обозначает постоянный член функции мотора 301 главного буфера на i-м состоянии задачи; и
обозначает постоянный член функции мотора 301 главного буфера на i-м состоянии задачи; и
 обозначает постоянный член функции мотора 302 авто-дифференциального буфера на i-м состоянии задачи.
обозначает постоянный член функции мотора 302 авто-дифференциального буфера на i-м состоянии задачи.
Альтернативно функции алгоритма управления мотора 301 главного буфера и мотора 302 авто-дифференциального буфера, описанные выше, могут быть необязательно установлены как кусочные функции, таким образом имея разные коэффициенты и постоянные значения в соответствии с разными углами поворота, а также величинами угловой скорости. В примере для мотора 302 авто-дифференциального буфера при постоянной угловой скорости и согласно указанному алгоритму управления, зависимость вращающего момента от угла поворота мотора 302 авто-дифференциального буфера в общем имеет форму кривой, как показано на фиг. 6.
Альтернативно для достижения более высокого показателя эффективности процесс стыковки может быть разделен на множество состояний задачи с целью отдельной установки коэффициентов их алгоритмов управления.
В соответствии с матрицей JF Якоби силы эквивалентная сила F стыковочного кольца 101 может быть получена из вращающего момента M мотора. Посредством правильной установки алгоритма управления мотора можно получить требующуюся эквивалентную силу F стыковочного кольца. В соответствии с передаточными характеристиками стыковочного механизма настоящего изобретения вращающий момент мотора Ms1, Ms2, Ms3 авто-дифференциального буфера в основном определяет эквивалентную эффективность угла крена и бокового смещения стыковочного кольца 101. Вращающий момент мотора Mm1, Mm2, Mm3 главного буфера в основном определяет эквивалентную эффективность в осевом направлении и направлении рыскания стыковочного кольца 101.
В данном варианте осуществления настоящего изобретения, когда мотор 301 главного буфера и мотор 302 авто-дифференциального буфера оба демонстрируют характеристические кривые взаимосвязи вращающего момента и угла, как показано на фиг. 6, эквивалентная эффективность стыковочного кольца 101 в шести направлениях должна иметь подобные характеристики. Для примера рассматривается эквивалентная эффективность стыковочного кольца 101 в направлении Y. Кривая эквивалентной эффективности стыковочного кольца 101 в направлении Y в общем показана на фиг. 7, представляя собой кривую гистерезиса.
Система 106 управления снимает сигналы с круговых датчиков положения мотора, получает вычисленный угол поворота и скорость вращения мотора и управляет мотором во времени в соответствии с алгоритмом управления мотора. Что касается мощности мотора, соответствующие выражения имеют следующий вид:

, где i обозначает номер мотора; Vmi обозначает подаваемое напряжение мотора 301 i-го главного буфера; Vsi обозначает подаваемое напряжение мотора 302 i-го авто-дифференциального буфера; η1, η2 обозначают коэффициент передачи мотора 301 главного буфера и мотора 302 авто-дифференциального буфера, соответственно; nmi обозначает скорость вращения мотора 301 i-го главного буфера; и nsi обозначает скорость вращения мотора 302 i-го авто-дифференциального буфера.
Полуактивный рабочий механизм управления буферного демпфирования, применяемый в настоящем изобретении, описывается далее.
Будучи готовым к стыковке, активное стыковочное кольцо 101 выдвигается, и система 106 управления подает мощность на мотор 301 главного буфера и мотор 302 авто-дифференциального буфера, как определено заранее. Система 106 управления переводит режимы управления мотора 301 главного буфера и мотора 302 авто-дифференциального буфера в режимы захвата.
Когда два стыковочных механизма находятся в процессе стыковки и осуществляют механический контакт, активное стыковочное кольцо 101 активного стыковочного механизма подвергается воздействию стыковочного усилия и оказывает воздействие на шесть винтов. Затем винты передают нагрузку на мотор 301 главного буфера и мотор 302 авто-дифференциального буфера посредством цепи трансмиссии.
Когда стыковочное усилие превышает удерживающий момент мотора, винты демонстрируют растяжение или сжатие, и соответствующие мотор 301 главного буфера и мотор 302 авто-дифференциального буфера начинают вращаться. Следует отметить, что мотор 301 главного буфера и мотор 302 авто-дифференциального буфера в это время продолжают сохранять способность по крутящему моменту.
Система 106 управления снимает сигналы с круговых датчиков положения мотора 301 главного буфера и мотора 302 авто-дифференциального буфера, и система 106 управления на основе этой информации определяет, находятся ли в контакте стыковочные кольца двух стыковочных механизмов. Когда результат показывает, что они находятся в контакте, система 106 управления управляет каждым из моторов в соответствии с предварительно установленным алгоритмом управления, который обычно представляет собой сервоуправление.
Предпочтительно после того как стыковочные кольца вступают в контакт, система 106 управления подает мощность на мотор 301 главного буфера в соответствии с установленным напряжением, чтобы толкать стыковочное кольцо 101 вперед. В то же время система 106 управления ограничивает максимальную скорость мотора 301 главного буфера. Во время процесса выталкивания средняя скорость растяжения винтов в каждом наборе обратно пропорциональна сопротивлению, которое они встречают. Когда винты в одном и том же наборе подвергаются действию сопротивления, они будут тормозить скорость растяжения. С другой стороны, они будут ускорять скорость растяжения под воздействием движущей силы. В результате активное стыковочное кольцо 101 активного стыковочного механизма пассивно создает отклонения положения и ориентации и приспосабливается к относительному отклонению двух стыковочных механизмов.
Когда система 106 управления определяет, что стыковочные кольца двух космических кораблей сопряжены и реализовали захват, система 106 управления переводит режимы управления мотора 301 главного буфера и мотора 302 авто-дифференциального буфера из режимов захвата в буферные режимы. Система 106 управления поднимает подаваемое напряжение мотора 301 главного буфера и мотора 302 авто-дифференциального буфера так, чтобы повысить приводную способность моторов, таким образом увеличивая буферную способность стыковочных колец.
В буферном состоянии стыковочный механизм потребляет энергию относительного движения и корректирует отклонение положения и ориентации стыковочного кольца 101. После завершения буферизации длины Ls шести винтов (s обозначает номер каждого винта) должны быть равны, и устанавливается длина Lu винтов после коррекции стыковочным кольцом 101. Система 106 управления управляет мотором в соответствии с предварительно установленным алгоритмом управления буферного режима и сигналами с круговых датчиков положения мотора 301 главного буфера и мотора 302 авто-дифференциального буфера так, что относительное движение между двумя космическими кораблями останавливается и корректируется, то есть сумма длин шести винтов должна быть равной.
Следует отметить, что длина Lu винтов после коррекции стыковочным кольцом 101 может быть предопределенной (т. е. предварительно заданной на земле или введенной центром управления полетом) или может быть установлена системой 106 управления в соответствии с предварительно прописанной программой на основе выполняемого буферного процесса.
Также следует объяснить, что в зависимости от разнообразных алгоритмов управления количества повторяемых колебаний стыковочного кольца 101 в активном стыковочном механизме также будут отличаться.
Далее будут описаны принципы управления и регулирования системы 106 управления.
Для того чтобы гарантировать, что активное стыковочное кольцо 101 и пассивное стыковочное кольцо 201 двух космических кораблей смогут сблизиться друг с другом во время стыковочного процесса захвата, требуется, чтобы стыковочное кольцо 101 стыковочного устройства 100 автоматически приспосабливалось к начальному отклонению, и потребление энергии и стыковочное усилие следует как можно минимизировать во время процесса приспособления. Это требует малой жесткости демпфирования буферной системы стыковочного устройства 100. Другими словами, эквивалентная сила стыковочного кольца 101 должна быть малой. В этом случае буферная система в состоянии захвата демонстрирует «мягкие» свойства и также имеет возможность активно приспосабливаться к отклонению. После выдачи сигнала захвата буферная система должна иметь достаточное демпфирование для буферизации ее относительного движения во время процесса движения, заданного активным стыковочным кольцом 101, и эквивалентную силу стыковочного кольца 101 устанавливают на более высокий уровень. В это время буферная система демонстрирует относительно «жесткие» характеристики, отличающиеся от имеющихся в состоянии захвата. Все эти характеристики могут быть реализованы системой 106 управления при регулировании рабочего режима.
В дополнение при стыковочной операции, поскольку характеристики стыкующихся космических кораблей (такие как качественные характеристики, начальные условия контакта для стыковки) являются разными, существуют различия между буферными демпфирующими характеристиками стыковочных механизмов. В одном примере активного стыковочного устройства 100 параметры системы 106 управления являются настраиваемыми, и их можно регулировать посредством установки простых параметров для регулирования его характеристик буферного демпфирования. Таким образом настройка параметров гарантирует, что активное стыковочное устройство 100 может приспосабливаться к особым характеристикам космического корабля (например, качественным параметрам, центроидному смещению, скорости приближения и угловой скорости космических кораблей). Поэтому стыковочное устройство согласно настоящему изобретению обладает широкой стыковочной приспособляемостью и широкой стыковочной способностью.
Рабочее состояние и процесс стыковочного механизма в соответствии с 1-ым вариантом осуществления настоящего изобретения будут описаны следующим образом.
Сначала активное стыковочное кольцо 101 активного стыковочного механизма выталкивают из отведенного состояния в положение готовности к стыковке (т. е. выдвинутое положение), и активное стыковочное кольцо 101 активного стыковочного механизма разблокируют (оно было заблокировано для преодоления среды нагрузки при старте космического корабля). Система 106 управления подает и увеличивает мощность на мотор 301 главного буфера и мотор 302 авто-дифференциального буфера и приводит в действие мотор 301 главного буфера, чтобы выталкивать стыковочное кольцо 101 в соответствии с предопределенным положением стыковочного кольца 101. После того как стыковочное кольцо заходит на свое правильное место, устройство управления переводит алгоритм управления мотора в режим захвата.
Во-вторых, преследующий космический корабль заходит в диапазон условий начального контакта для стыковки. Условия начального контакта для стыковки определяются как предварительно заданная область, окружающая стыковочное устройство.
В-третьих, осуществляется вход в состояние направляющего выравнивания стыковочного устройства 100. Стыковочные кольца двух космических кораблей находятся в контакте друг с другом. И под усилием взаимодействия активное стыковочное кольцо 101 активного стыковочного устройства 100 отклоняется. В это время система 106 управления активного стыковочного устройства 100 управляет мотором в соответствии с предопределенным режимом захвата. В таких условиях буферная система стыковочного устройства 100 демонстрирует «мягкие» характеристики, тем самым реализуя направление и выравнивание стыковки.
В-четвертых, выполняется захват активного стыковочного устройства 100, при котором гибкое соединение реализуется посредством сцепления соседствующих активного стыковочного устройства 100 и пассивного стыковочного устройства 200 с помощью механического захватного замка 103 и плиты 202 (или электромагнитного притяжения). После этого захватное сенсорное устройство стыковочного кольца 101 запускается и выдает сигналы захвата.
В-пятых, осуществляется вход в буферное состояние. Энергия относительного движения и остаточное относительное движение между двумя космическими кораблями абсорбируются и поглощаются силой противодействия, обеспечиваемой активным стыковочным кольцом 101. В это время система 106 управления активного стыковочного устройства 100 управляет мотором 301 главного буфера и мотором 302 авто-дифференциального буфера для вхождения в буферные рабочие режимы. В таких условиях буферная система стыковочного устройства 100 демонстрирует «жесткие» характеристики.
В-шестых, осуществляется вход в состояние притягивания. Два космических корабля притягиваются друг к другу активным стыковочным устройством 100 преследующего космического корабля. И точное выравнивание выполняют посредством направляющего штифта, установленного на верхней поверхности стыковочной рамы 104.
Наконец, осуществляется вхождение в состояние жесткого соединения. Когда стыковочные рамы 104 двух космических кораблей находятся в близком положении, конструкционный замок 105 срабатывает, выполняет жесткое соединение и обеспечивает усилие жесткого соединения и уплотнительное усилие для двух стыковочных поверхностей, таким образом завершая уплотнение стыковочного канала. Эта часть рабочего механизма является такой же, как и в космическом корабле «Шэньчжоу-8» при перемещении людей.
Вариант осуществления 2
Смотрите фиг. 8 – фиг. 12. Различия между вторым вариантом осуществления и 1 вариантом осуществления следующие:
Каждый набор буферных механизмов дополнительно содержит главную фрикционную муфту. Главный буфер заставляет гаечно-винтовые узлы растягиваться и сокращаться, только когда главная фрикционная муфта не проскальзывает. Главная фрикционная муфта приспособлена так, чтобы перед захватом иметь вращающий момент фрикционной муфты, который меньше, чем вращающий момент фрикционной муфты после завершения захвата. Главная фрикционная муфта будет проскальзывать, когда ее вращающий момент фрикционной муфты превышен.
Каждый набор буферных механизмов дополнительно содержит вспомогательную фрикционную муфту буфера. Авто-дифференциальный буфер заставляет гаечно-винтовые узлы растягиваться и сокращаться, только когда вспомогательная фрикционная муфта буфера проскальзывает. Вспомогательная фрикционная муфта буфера приспособлена так, чтобы перед захватом иметь вращающий момент фрикционной муфты, который меньше, чем вращающий момент фрикционной муфты после завершения захвата. Вспомогательная фрикционная муфта буфера будет проскальзывать, когда ее вращающий момент фрикционной муфты превышен.
Описание главного буфера
Согласно второму варианту осуществления настоящего изобретения главный буфер 401 дополнительно содержит мотор 406 главного буфера и компоненты трансмиссии главного буфера. Два гаечно-винтовых узла 403 в каждом наборе приводятся в действие соответствующим мотором 406 главного буфера посредством компонентов трансмиссии главного буфера. Второй вариант осуществления схож с первым вариантом осуществления, с наличием только того отличия, что главная фрикционная муфта 405 дополнительно расположена между мотором 406 главного буфера и компонентами трансмиссии главного буфера или между компонентами трансмиссии главного буфера и гаечно-винтовым узлом 403, или же между компонентами трансмиссии главного буфера.
Компоненты трансмиссии главного буфера в основном содержат вал 404 главного буфера; в дополнительном альтернативном варианте осуществления настоящего изобретения роторный выходной вал мотора 406 главного буфера является соосным валу 404 главного буфера и прямо соединен с ним. Для лучшей надежности и способности буферизации моторы 406 главных буферов также необязательно могут использоваться последовательно.
Мотор 406 главного буфера данного варианта осуществления реализует передачу движения и передачу мощности посредством главной фрикционной муфты 405 и вала 404 главного буфера. Момент проскальзывания главной фрикционной муфты 405 можно при необходимости регулировать во времени. Мотор 406 главного буфера может представлять собой мотор или комбинацию мотора и тормозного устройства. Мотор 406 главного буфера снабжен тормозным удерживающим устройством или обладает функцией удержания угла поворота. Предпочтительно функция удержания мотора 406 главного буфера реализована под управлением устройства управления.
Тормозной момент или удерживающий момент мотора 406 главного буфера должен быть больше, чем максимальный момент проскальзывания главной фрикционной муфты 405. Когда главная фрикционная муфта 405 не проскальзывает, выходная мощность мотора 406 главного буфера синхронно приводит вал 404 главного буфера во вращение посредством главной фрикционной муфты 405. Когда вращающий момент дополнительно прикладывают к валу 404 главного буфера, вращающий момент воздействует на главную фрикционную муфту 405 и мотор 406 главного буфера посредством цепи трансмиссии. Когда вращающий момент, передаваемый на главную фрикционную муфту 405, превышает момент проскальзывания главной фрикционной муфты 405, главная фрикционная муфта 405 начинает проскальзывать.
Мотор 406 главного буфера и главная фрикционная муфта 405 соединены в «последовательной» форме. Альтернативно мотор 406 главного буфера и главная фрикционная муфта 405 также могут быть соединены в «параллельной» форме. Фиг. 9 представляет собой схему одного варианта осуществления «параллельного» соединения. Этот вариант осуществления выполняет дифференциальную передачу между мотором 406 главного буфера, главной фрикционной муфтой 405 и валом 404 главного буфера посредством механизма 423 планетарной передачи.
В одном альтернативном варианте осуществления настоящего изобретения эластичное устройство может быть дополнительно расположено между главной фрикционной муфтой 405 и валом 404 главного буфера, которое обычно представляет собой спиральную пружину, имеющую определенный момент предварительной затяжки для защиты цепи трансмиссии. Также возможно дополнительно расположить пружину сжатия предварительной затяжки на верхнем конце винта 417 (418) для демпфирования и буферизации осевой ударной нагрузки более крупного винта.
Каждый набор буферных механизмов 102 дополнительно содержит датчик 407 смещения винта для регистрации растяжения и сокращения смещения гаечно-винтовых узлов 403. Главным буфером 401 управляют в соответствии с данными, зарегистрированными датчиком 407 смещения винта, таким образом удовлетворяя требованиям движения в процессе стыковки. Датчик 407 смещения винта может быть использован для измерения угла поворота вала 304 главного буфера. В данном варианте осуществления настоящего изобретения датчик 407 смещения винта может применять различные измерительные средства, такие как, помимо прочего, круговой датчик положения, преобразователь координат, потенциометр и так далее.
Описание авто-дифференциального буфера 402
Авто-дифференциальный буфер 402 содержит два зубчатых колеса 413, 414 и промежуточную шестерню 408. Конструкция в основном схожа с конструкцией, представленной в 1-ом варианте осуществления, при этом основное отличие заключается в том, что вспомогательная фрикционная муфта 410 буфера дополнительно расположена между промежуточной шестерней 408 и авто-дифференциальным приводным устройством.
Механизм 409 цилиндрической пружины и вспомогательная фрикционная муфта 410 буфера обе соединены с промежуточной шестерней 408 для синхронной передачи. Разумеется, механизм 409 цилиндрической пружины и вспомогательная фрикционная муфта 410 буфера применяются как буферные компоненты поглощения энергии, и эти компоненты поглощения энергии также могут быть соединены с зубчатым колесом 408, с зубчатым колесом 413 или зубчатым колесом 414, и функция является эквивалентной. Буферные компоненты поглощения энергии авто-дифференциального буфера 402 могут представлять собой сочетание пружины и фрикционной муфты или по меньшей мере одно из пружины, мотора, электромагнитного демпфера и фрикционной муфты.
Аналогично 1-му варианту осуществления, каждый набор буферных механизмов 102 дополнительно содержит авто-дифференциальный датчик 412 винта, который применяется для регистрации разницы между смещениями растяжения и сокращения двух гаечно-винтовых узлов в одном и том же наборе. Авто-дифференциальный датчик 412 винта может быть использован для измерения угла поворота промежуточной шестерни 308. В одном необязательном варианте осуществления настоящего изобретения авто-дифференциальный датчик 412 винта может применять разнообразные средства измерения, такие как, помимо прочего, круговые датчики положения, преобразователи координат, потенциометры и так далее.
Различие между этим вариантом осуществления и 1-м вариантом осуществления дополнительно заключается в том, что демпфирующий момент авто-дифференциального буфера Ms1, Ms2, Ms3 совместно обеспечивается механизмом 409 цилиндрической пружины и вспомогательной фрикционной муфтой 410 буфера для буферизации и корректировки угла поворота и бокового смещения активного стыковочного кольца 101, при этом механизм 409 цилиндрической пружины используется для корректировки. Когда изменение положения и ориентации активного стыковочного кольца 101 приводит к тому, что длины двух винтов в одном и том же наборе становятся разными, в это время механизм 409 цилиндрической пружины запасает энергию, тем самым применяясь для буферизации. После того как стыковочное столкновение проходит, поскольку механизм 409 цилиндрической пружины высвобождает энергию, длины двух винтов в одном и том же наборе снова выравниваются, тем самым выполняя корректировку. Механизм 409 цилиндрической пружины должен обладать определенным моментом предварительной затяжки в своем исходном положении. На фиг. 10 представлена типичная характеристическая кривая взаимосвязи угла поворота и вращающего момента для механизма 409 цилиндрической пружины. Вследствие внутреннего трения пружины имеется определенная разность во вращающих моментах между ее передним и задним ходом.
Демпфирующий момент главного буфера Mm1, Mm2, Mm3 в основном обеспечивается главной фрикционной муфтой 405 и мотором 406 главного буфера для буферизации и корректировки активного стыковочного кольца 101 в направлениях оси и отклонения.
Согласно данному варианту осуществления настоящего изобретения главная фрикционная муфта 405 и вспомогательная фрикционная муфта 410 буфера представляют собой магнитные порошковые муфты, в которых момент проскальзывания фрикционной муфты MCi связан с подаваемым напряжением Vi постоянного тока.
В состоянии захвата устройство управления управляет главной фрикционной муфтой 405, вспомогательной фрикционной муфтой 410 буфера и мотором 406 главного буфера в соответствии с режимом захвата, и момент проскальзывания главной фрикционной муфты 405 и вспомогательной фрикционной муфты 410 буфера устанавливают во вращающий момент первой передачи. В буферном состоянии устройство управления управляет главной фрикционной муфтой 405, вспомогательной фрикционной муфтой 410 буфера и мотором 406 главного буфера в соответствии с буферным режимом, и момент проскальзывания главной фрикционной муфты 405 и вспомогательной фрикционной муфты 410 буфера устанавливают во вращающий момент второй передачи. Вращающий момент второй передачи должен быть больше, чем вращающий момент первой передачи. Следует отметить, что положение передачи момента проскальзывания связано с потребностями в разных моментах проскальзывания, заданных одной и той же фрикционной муфтой в соответствии с требованиями разных рабочих состояний. Оно может представлять собой фиксированное значение или переменное значение, которое изменяется в зависимости от времени или других параметров. В результате даже в режиме захвата момент проскальзывания главной фрикционной муфты 405 и вспомогательной фрикционной муфты 410 буфера могут не быть точно одинаковыми.
Устройство управления регулирует подаваемое напряжение Vi главной фрикционной муфты 405 и вспомогательной фрикционной муфты 410 буфера для изменения момента проскальзывания фрикционных муфт. Таким образом осуществляется регулирование эквивалентной эффективности стыковочного кольца 101.
Следует отметить, что вместо магнитных порошковых фрикционных муфт также могут применяться демпфирующие механизмы других типов (такие как электромагнитный механизм сцепления, магнитореологический демпфер, гистерезисная муфта или электромеханическое устройство управления). В зависимости от разных типов вращающий момент сопротивления такого механизма не только связан с его удерживающим моментом, но также имеет определенную функциональную взаимосвязь с его скоростью проскальзывания.
Полуактивный рабочий механизм управления буферного демпфирования, применяемый в настоящем изобретении, описывается далее.
Будучи готовым к стыковке, активное стыковочное кольцо 101 выдвигается, и система управления подает мощность на главную фрикционную муфту 405 и вспомогательную фрикционную муфту 410 буфера, как определено заранее.
Когда два стыковочных механизма находятся в процессе стыковки и осуществляют механический контакт, активное стыковочное кольцо 101 активного стыковочного механизма подвергается воздействию стыковочного усилия и оказывает воздействие на винты 417, 418. Затем винты передают нагрузку на главный буфер 401 и авто-дифференциальный буфер 402 посредством цепи трансмиссии.
Когда стыковочное усилие превышает момент проскальзывания главного буфера 401, винты демонстрируют растяжение или сокращение, и соответствующий вал 404 главного буфера начинает вращаться. Следует отметить, что в это время мотор 406 главного буфера не снабжается энергией и обладает определенной функцией автоблокировки или функцией сохранения угла. Если мотор 406 главного буфера не обладает функцией автоблокировки (или функция автоблокировки терпит неудачу), то стыковочное усилие передается на мотор 406 главного буфера, вызывая обратное вращение, и главная фрикционная муфта 405 не может проскальзывать. Однако это не оказывает негативного влияния на растяжение или сокращение винта.
В соответствии с принципом передачи разность осевой нагрузки, испытываемая винтами в одном и том же наборе, будет воздействовать на авто-дифференциальный буфер 402. Когда разность нагрузки превышает демпфирующий момент авто-дифференциального буфера 402 (т. е. сумму демпфирующих моментов механизма 409 цилиндрической пружины и вспомогательной фрикционной муфты 410 буфера), промежуточная шестерня 408 начинает вращаться.
Устройство управления снимает сигналы датчика 407 смещения винта и авто-дифференциального датчика 412 винта и определяет, находятся ли в контакте стыковочные кольца двух стыковочных механизмов, в соответствии с данными с датчика 407 смещения винта и авто-дифференциального датчика 412 винта. Когда определяется, что они находятся в контакте, устройство управления подает питание на каждый мотор 406 главного буфера и управляет винтами в одном и том же наборе для растяжения вперед. Во время процесса выталкивания скорость растяжения винтов в каждом наборе обратно пропорциональна сопротивлению, которое они встречают. Когда винты в одном и том же наборе встречают сопротивление (прижимающее усилие в этом случае), они будут уменьшать скорость растяжения (или так называемую скорость растяжения «без нагрузки»). С другой стороны, они будут ускорять скорость растяжения под воздействием движущей силы. Следует отметить, что в это время сопротивление винтов в одном и том же наборе не означает, что два винта оба подвержены действию прижимающего усилия. Возможна ситуация, когда один винт оттягивается, а другой винт прижимается, но прижимающее усилие больше тянущего усилия, так что сумма представляет собой прижимающее усилие. Тем не менее, когда тянущее усилие или прижимающее усилие превышает предельную величину проскальзывания главной фрикционной муфты 405, главная фрикционная муфта 405 начинает проскальзывать. В то же время винты в одном и том же наборе встречают разную нагрузку, что будет вынуждать вращаться промежуточную шестерню 408 авто-дифференциального буфера 402. Таким образом, активное стыковочное кольцо 101 активного стыковочного устройства 100 пассивно создает отклонения положения и ориентации так, чтобы приспосабливаться к относительному отклонению двух стыковочных механизмов.
Когда система управления определяет, что стыковочные кольца двух космических кораблей находятся в контакте и реализовали захват, система управления переводит рабочие режимы главной фрикционной муфты 405, вспомогательной фрикционной муфты 410 буфера и мотора 406 главного буфера из режимов захвата в буферные режимы. Система управления поднимает подаваемое напряжение главной фрикционной муфты 405 и вспомогательной фрикционной муфты 410 буфера так, чтобы увеличивать момент проскальзывания главной фрикционной муфты 405 и вспомогательной фрикционной муфты 410 буфера, таким образом повышая буферную способность стыковочных колец. Особая проектная величина момента проскальзывания связана с начальными условиями для целевых параметров стыковки и космического корабля и может быть реализована предварительной установкой на земле или введением центром управления полетом перед стыковкой.
В буферном состоянии стыковочный механизм потребляет энергию относительного движения и корректирует отклонение положения и ориентации стыковочного кольца 101. После завершения буферизации длины Ls шести винтов (s обозначает номер каждого винта) должны быть равны, и устанавливается длина Lu винтов после коррекции стыковочным кольцом 101. Система управления управляет мотором 406 главного буфера в соответствии с сигналами датчика 407 смещения винта так, что три датчика 407 смещения винта достигают предварительно установленных величин, при этом сумма длин винтов в трех наборах равна 2Lu.
Устанавливается равенство L1+L2 = L3+L4 = L5+L6 = 2Lu.
В то же время изменение положения и ориентации стыковочного кольца 101 происходит под воздействием усилия столкновения стыковки, и длины винтов 417 и 418 в одном и том же наборе являются разными. Механизм 409 цилиндрической пружины запасает энергию для выполнения буферизации. Магнитная порошковая вспомогательная фрикционная муфта 410 буфера проскальзывает с потреблением энергии. Когда разница длины между винтами в одном и том же наборе сокращается, механизм 409 цилиндрической пружины начинает высвобождать энергию, преодолевает момент проскальзывания магнитной порошковой вспомогательной фрикционной муфты 410 буфера и уравнивает длину винтов в одном и том же наборе, таким образом выполняя коррекцию. Таким образом, буферизация и коррекция стыковочного кольца 101 могут быть получены посредством главного буфера 401 и авто-дифференциального буфера 402. Следует отметить, что длина Lu винтов после коррекции стыковочным кольцом 101 может быть предопределенной (т. е. предварительно заданной на земле или введенной центром управления полетом) или может быть установлена системой управления в соответствии с предварительно прописанной программой на основе выполняемого буферного процесса.
Устройство управления управляет направлением вращения мотора 406 главного буфера на основе данных с датчика 407 смещения винта. Более того, устройство управления может также выполнять управление в замкнутом контуре направлением вращения и скоростью вращения мотора 406 главного буфера на основе данных с датчика 407 смещения винта. В зависимости от разнообразных алгоритмов управления количества повторяемых колебаний стыковочного кольца 101 в активном стыковочном механизме также будут отличаться.
Предпочтительно для того чтобы гарантировать, что длины винтов в одном и том же наборе возвращаются к уравниванию, момент проскальзывания магнитной порошковой вспомогательной фрикционной муфты 410 буфера в буферном состоянии должен быть меньше, чем возвратный момент механизма 409 цилиндрической пружины, что может быть достигнуто регулированием момента проскальзывания магнитной порошковой вспомогательной фрикционной муфты 410 буфера в буферном состоянии. Также, Lu может быть установлена в предельную длину винта (т. е. в самую длинную длину, на которую может растягиваться винт).
Кроме того, механизм 409 цилиндрической пружины и вспомогательная фрикционная муфта 410 буфера в авто-дифференциальном буфере 402 также могут быть заменены мотором, чтобы приблизиться к характеристикам демпфирования.
Согласно данному варианту осуществления настоящего изобретения для упрощения управления мотор 406 главного буфера также может быть заблокирован во время процесса захвата и буферизации без вращения. После остановки относительного движения между двумя космическими кораблями устройство управления управляет мотором 406 главного буфера так, чтобы координировать действия и корректировать стыковочное кольцо 101.
На фиг. 11 и фиг. 12 показана эквивалентная эффективность стыковочного кольца в стыковочном механизме в буферном состоянии захвата. Эти кривые получены в соответствии с взаимосвязью между моментом демпфирования буфера M и эквивалентной силой F стыковочного кольца 101.
Фиг. 11 представляет собой схему, на которой показана эквивалентная эффективность стыковочного кольца в боковом направлении Y. Характеристическая кривая представляет собой кривую гистерезиса. Когда стыковочное кольцо перемещается из исходного положения вдоль оси Y в направлении вперед к ε1, стыковочное кольцо преодолевает внутренний зазор винта, зубчатого колеса и т. п. Когда поперечная сила стыковочного кольца достигает f1, все конструкционные зазоры устранены. Аналогично, когда стыковочное кольцо 101 возвращается обратно из бокового положения ε2 и к ε3, все зазоры устранены. На кривой наклон кривой в основном связан с эффективностью механизма 409 цилиндрической пружины авто-дифференциального буфера 402. Разность нагрузки между передними ходами ε1, ε2 и задними ходами ε3, ε4 в основном обусловлена вспомогательной фрикционной муфтой 410 буфера и ее трением передачи. Таким же образом кривые эквивалентной эффективности стыковочного кольца 101 в направлении поворота и направлении Z являются подобными.
Фиг. 12 представляет собой схему, на которой показана эквивалентная эффективность стыковочного кольца 101 в направлении тангажа. Величина λ1 связана с внутренним зазором и эластичностью стыковочного механизма. На кривой эквивалентная сила Mz связана с эффективностью главного буфера 401. При условии, что угол тангажа θ стыковочного кольца сильно не изменяется, эквивалентная эффективность в направлении тангажа может быть обработана в соответствии с постоянной величиной, и обычно M1 = M2. Таким же образом кривые эквивалентной эффективности стыковочного кольца 101 в направлении рыскания и в направлении X являются подобными.
На фиг. 11 и фиг. 12 показаны кривые эквивалентной эффективности стыковочного кольца, которое наводится мотором 406 главного буфера. Для повышения вероятности захвата и эффективности буферизации устройство управления не только регулирует или переключает параметры момента проскальзывания главных фрикционных муфт 405 и 410 в соответствии с рабочими состояниями, но также ему необходимо регулировать или переключать параметры движения мотора 406 главного буфера. Также эффективность демпфирования можно регулировать посредством предварительной установки на земле или введения на орбите в соответствии с характеристиками цели стыковки космического корабля и начальными условиями стыковки.
Далее будут описаны принципы управления и регулирования системы управления.
Для того чтобы гарантировать, что активное стыковочное кольцо 101 и пассивное стыковочное кольцо 201 двух космических кораблей смогут сблизиться друг с другом во время стыковочного процесса захвата, требуется, чтобы стыковочное кольцо 101 стыковочного устройства 100 автоматически приспосабливалось к начальному отклонению, и потребление энергии и стыковочное усилие следует как можно минимизировать во время процесса приспособления. Это требует малой жесткости демпфирования буферной системы стыковочного устройства 100. Другими словами, эквивалентная сила активного стыковочного кольца 101 должна быть малой. Перед захватом момент проскальзывания фрикционной муфты устанавливают на более низкий уровень, и скорость растяжения активного стыковочного кольца 101 приводят в соответствие с начальными условиями стыкования и целевыми параметрами. В этом случае буферная система в состоянии захвата демонстрирует «мягкие» свойства и также имеет возможность активно приспосабливаться к отклонению. После выдачи сигнала захвата буферная система должна иметь достаточное демпфирование для буферизации ее относительного движения во время процесса движения, заданного активным стыковочным кольцом 101, и момент проскальзывания фрикционной муфты стыковочного кольца 101 устанавливают на более высокий уровень. В это время буферная система демонстрирует относительно «жесткие» характеристики, отличающиеся от имеющихся в состоянии захвата. Все эти характеристики могут быть реализованы системой управления при регулировании рабочего режима.
В дополнение при стыковочной операции, поскольку характеристики стыкующихся космических кораблей (такие как качественные характеристики, начальные условия контакта для стыковки) являются разными, существуют различия между буферными демпфирующими характеристиками стыковочных механизмов (т. е. вышеупомянутый вращающий момент фрикционной муфты). В одном примере активного стыковочного устройства 100 параметры системы управления являются настраиваемыми, и их можно регулировать посредством установки простых параметров для регулирования его характеристик буферного демпфирования. В результате настройка параметров гарантирует, что активное стыковочное устройство 100 может приспосабливаться к особым характеристикам космического корабля (например, качественным параметрам, центроидному смещению, скорости приближения и угловой скорости космических кораблей). Поэтому стыковочное устройство согласно настоящему изобретению обладает широкой стыковочной приспособляемостью и широкой стыковочной способностью.
Рабочие состояние и процесс стыковочного механизма в соответствии со 2-ым вариантом осуществления настоящего изобретения будет описан следующим образом.
Сначала активное стыковочное кольцо 101 активного стыковочного механизма выталкивают из отведенного состояния в положение готовности к стыковке (т. е. отведенное состояние), и активное стыковочное кольцо 101 активного стыковочного механизма разблокируют (оно было заблокировано для преодоления среды нагрузки при старте космического корабля). Подсистема управляющего привода подает и увеличивает мощность на магнитные порошковые главные фрикционные муфты 405, 410 (в соответствии с режимом захвата), и устройство управления приводит мотор 406 главного буфера в действие так, чтобы выталкивать стыковочное кольцо 101 в соответствии с предопределенным положением стыковочного кольца 101.
Во-вторых, активный космический корабль заходит в диапазон условий начального контакта для стыковки. Условия начального контакта для стыковки определяются как предварительно заданная область, окружающая стыковочное устройство.
В-третьих, осуществляется вход в состояние направляющего выравнивания активного стыковочного устройства 100. Стыковочные кольца двух космических кораблей находятся в контакте друг с другом. И под усилием взаимодействия активное стыковочное кольцо 101 активного стыковочного устройства 100 отклоняется. В это время система управления активного стыковочного устройства 100 управляет магнитными порошковыми главными фрикционными муфтами 405, 410 и мотором 406 главного буфера так, чтобы войти в рабочий режим захвата. В таких условиях буферная система стыковочного устройства 100 демонстрирует «мягкие» характеристики, тем самым реализуя направление и выравнивание стыковки.
В-четвертых, выполняется захват активного стыковочного устройства 100, при котором гибкое соединение реализуется посредством сцепления соседствующих активного стыковочного устройства 100 и пассивного стыковочного устройства 200 с помощью механического захватного замка 103 и плиты 202 (или электромагнитного притяжения). После этого захватное сенсорное устройство активного стыковочного кольца 101 запускается и выдает сигналы захвата.
В-пятых, осуществляется вход в буферное состояние. Энергия относительного движения и остаточное относительное движение между двумя космическими кораблями абсорбируются и поглощаются силой противодействия, обеспечиваемой активным стыковочным кольцом 101. В это время устройство управления активного стыковочного устройства 100 управляет магнитными порошковыми главными фрикционными муфтами и мотором 406 главного буфера так, чтобы войти в буферные рабочие режимы. В таких условиях буферная система стыковочного устройства 100 демонстрирует «жесткие» характеристики.
В-шестых, осуществляется вход в состояние притягивания. Два космических корабля притягиваются друг к другу активным стыковочным устройством 100 активного космического корабля. И точное выравнивание выполняют посредством муфты с направляющим штифтом на верхней поверхности стыковочной рамы 104.
Наконец, осуществляется вхождение в состояние жесткого соединения. Когда стыковочные рамы 104 двух космических кораблей находятся в близком положении, конструкционный замок 105 срабатывает, выполняет жесткое соединение и обеспечивает усилие жесткого соединения и уплотнительное усилие для двух стыковочных поверхностей, таким образом завершая уплотнение стыковочного канала. Эта часть рабочего механизма является такой же, как и в космическом корабле «Шэньчжоу-8» при перемещении людей.
В итоге в настоящем изобретении раскрыты система и способ стыковки, в которых для осуществления управления не требуется никаких датчиков усилия. В дополнение устраняется необходимость в вычислении точных решений для платформы Стюарта, и в системе управления достигается управление с мгновенной обратной связью.
При применении настоящего изобретения преимуществом является не только эффективная буферизация ударной нагрузки во время процесса стыковки, но и реализация стыковки и отделения с разными целевыми показателями качества стыковки посредством изменения вращающего момента фрикционной муфты на орбите, а также рабочей скорости моторного приводного устройства. Кроме того, осуществляется дополнительная стыковка с существующим космическим кораблем для перемещения людей. Решение согласно настоящему изобретению является простым, а значит обладает преимуществами, заключающимися в надежности работы, легком весе, большой экономности и универсальности.
Специалисту в данной области техники будет понятно, что различные модификации и изменения могут быть внесены в настоящее изобретение без отступления от объема и идеи настоящего изобретения. Исходя из вышесказанного подразумевается, что настоящее изобретение охватывает модификации и изменения этого изобретения, при условии, что они входят в объем настоящего изобретения и его эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНДРОГИННЫЙ ПЕРИФЕРИЙНЫЙ АГРЕГАТ СТЫКОВКИ (АПАС) И ДЕМПФЕР АМОРТИЗАЦИОННО- ПРИВОДНОЙ СИСТЕМЫ ДЛЯ НЕГО | 1998 |
|
RU2131829C1 |
| ПЕРИФЕРИЙНЫЙ СТЫКОВОЧНЫЙ МЕХАНИЗМ | 2017 |
|
RU2657623C1 |
| СТЫКОВОЧНАЯ СИСТЕМА КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2683706C2 |
| СТЫКОВОЧНОЕ УСТРОЙСТВО | 1999 |
|
RU2148541C1 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2706639C2 |
| АКТИВНОЕ УСТРОЙСТВО ФИКСАЦИИ ПОЛЕЗНОГО ГРУЗА ПРЕИМУЩЕСТВЕННО К КОРПУСУ НАХОДЯЩЕГОСЯ НА ОРБИТЕ КОСМИЧЕСКОГО КОРАБЛЯ | 2014 |
|
RU2583993C2 |
| СТЫКОВОЧНЫЙ МЕХАНИЗМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2662605C2 |
| УСТРОЙСТВО СТЯГИВАНИЯ СТЫКОВОЧНЫХ АГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2706640C1 |
| СТАНЦИЯ ОБЕСПЕЧЕНИЯ МЯГКОЙ ПОСАДКИ КОСМИЧЕСКИХ КОРАБЛЕЙ (ВАРИАНТЫ) | 2021 |
|
RU2770609C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ФРИКЦИОННЫЙ МНОГОДИСКОВЫЙ ТОРМОЗ | 2018 |
|
RU2693756C1 |
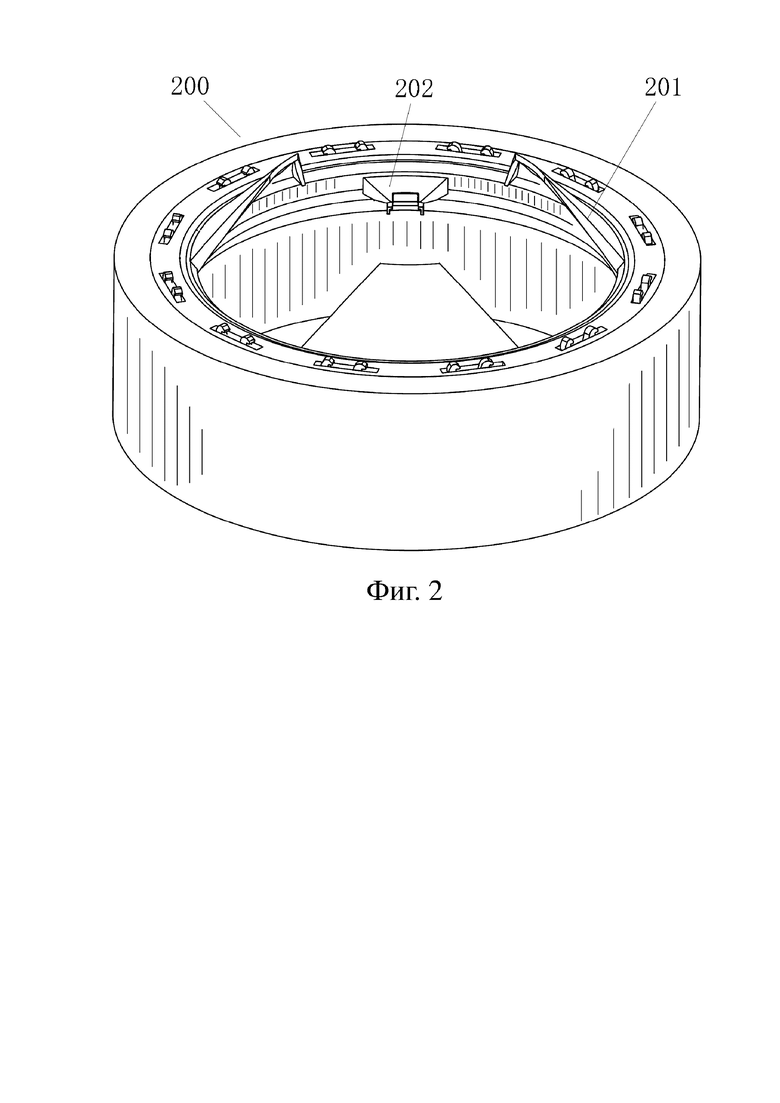
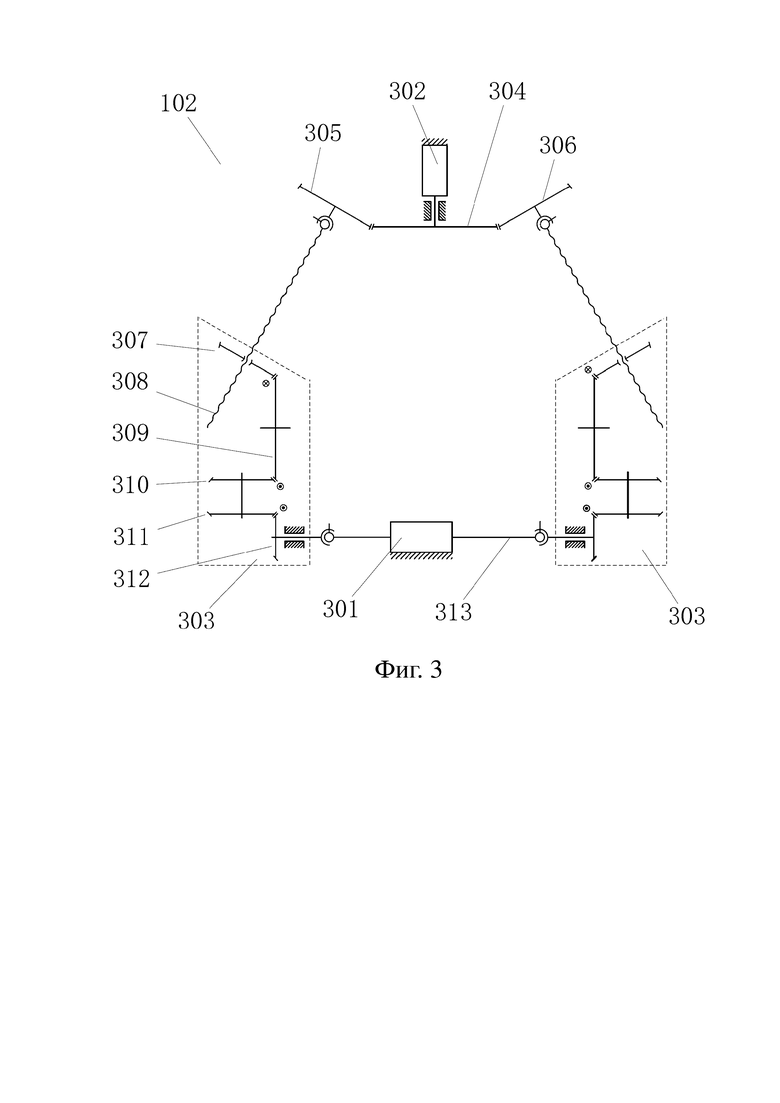
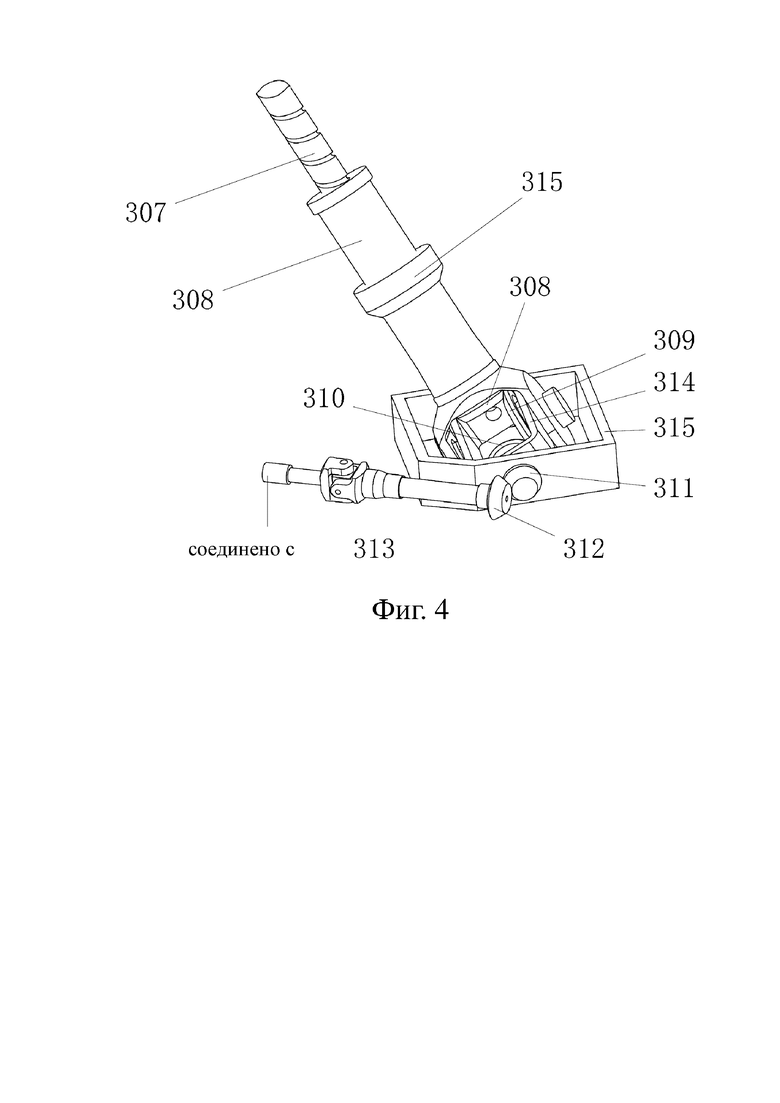
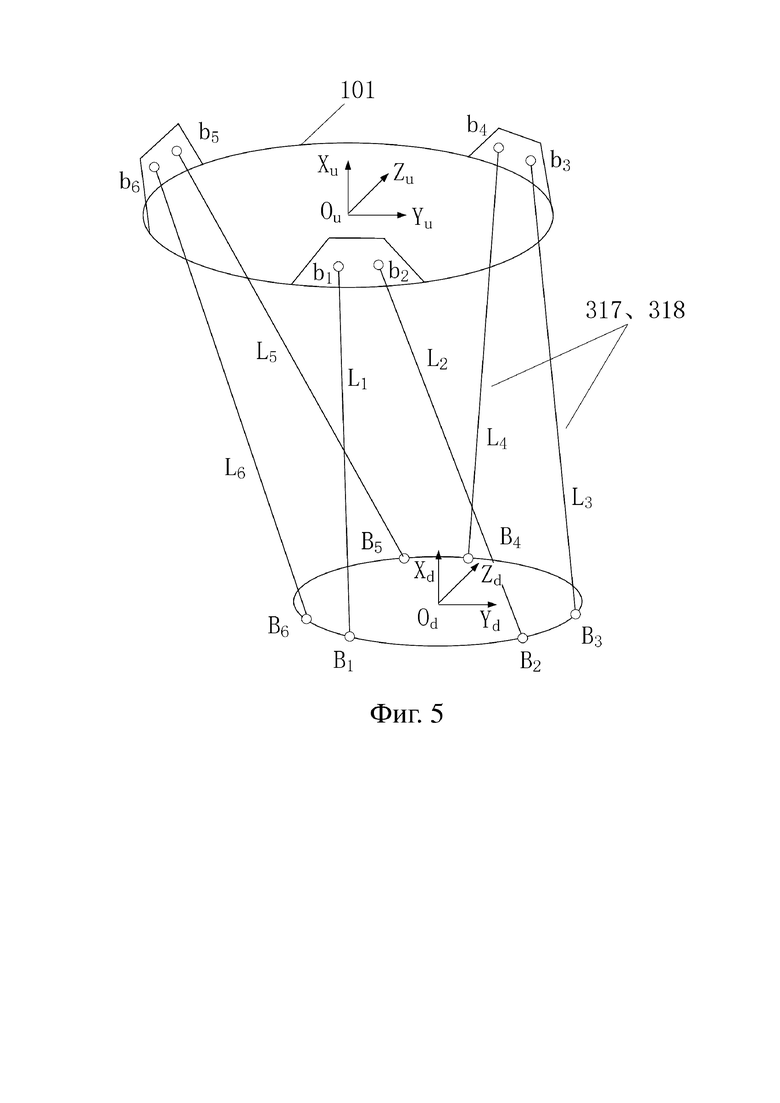
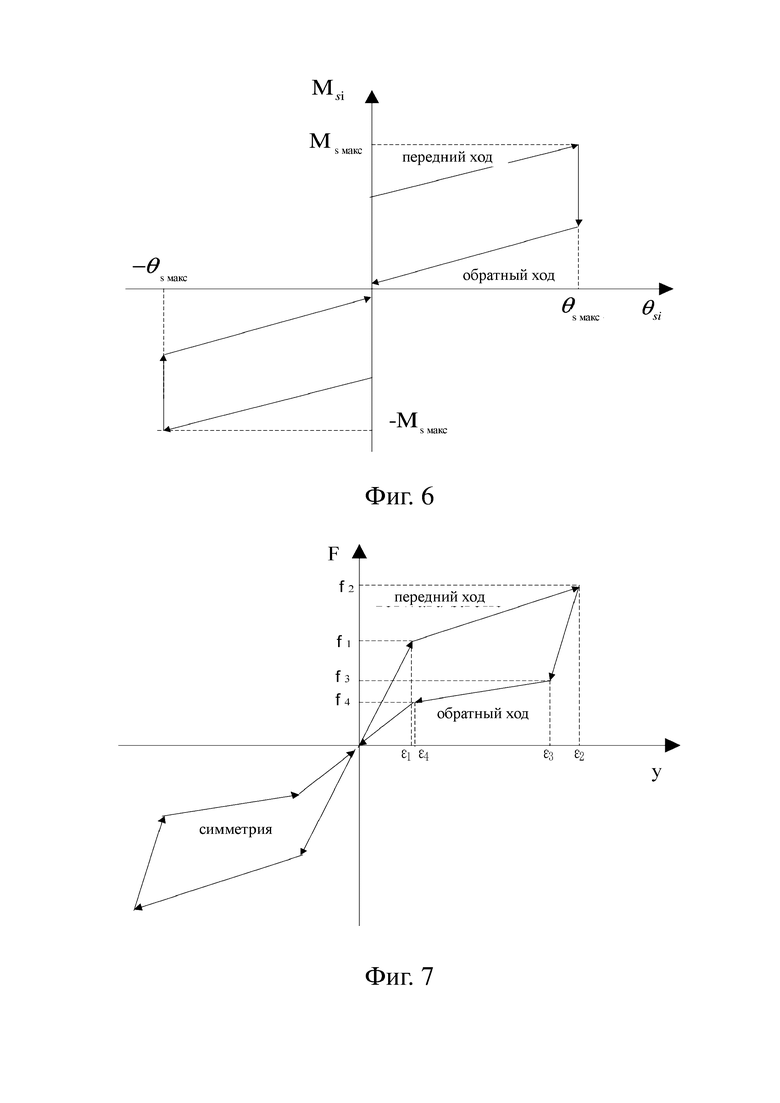
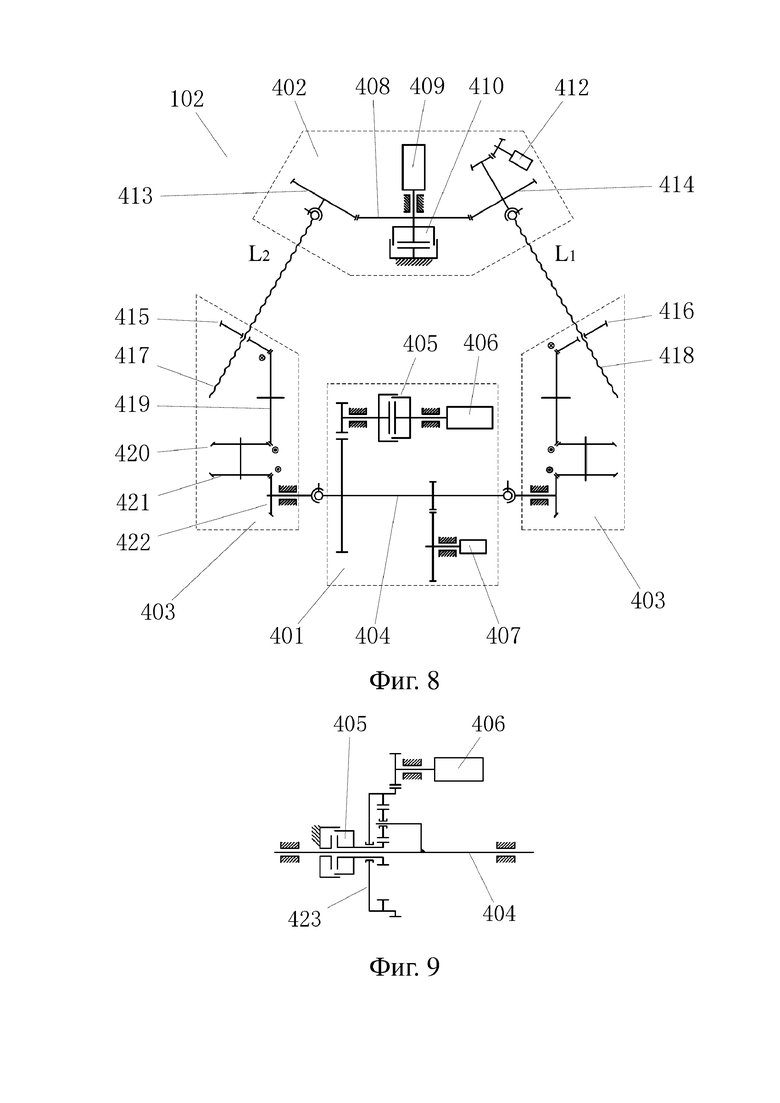
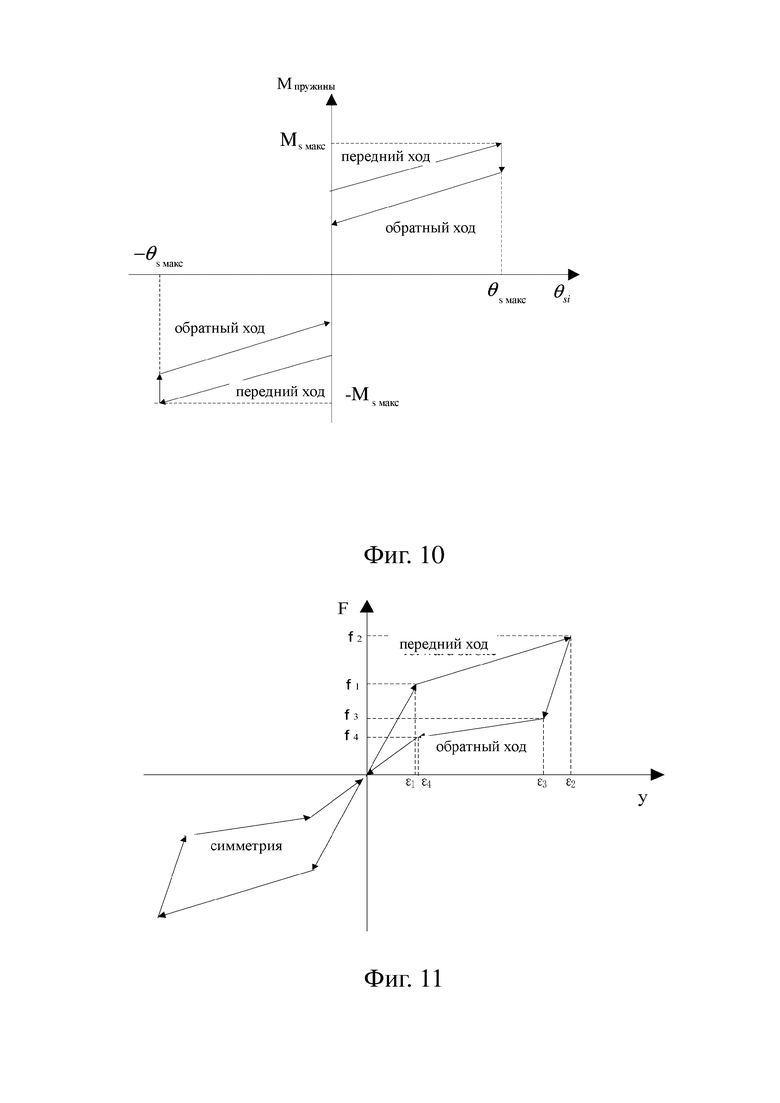
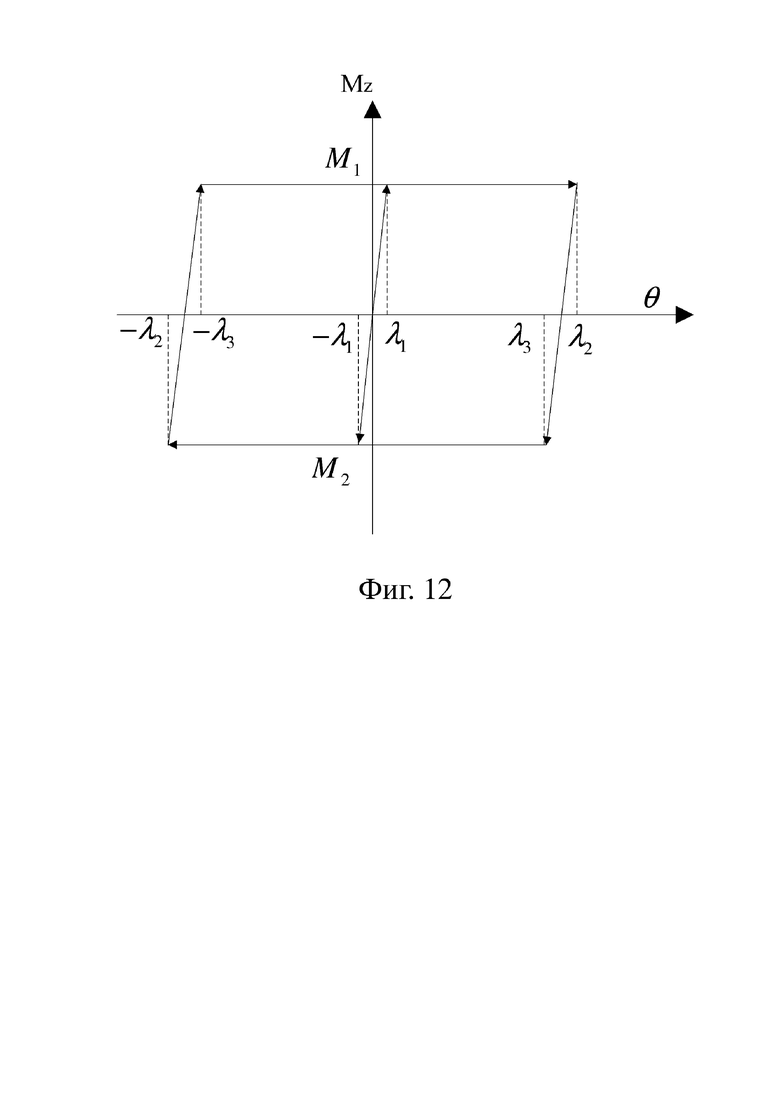
Изобретение относится к космической технике, а более конкретно к системе и способу стыковки космических кораблей. Система стыковки космических кораблей содержит активное стыковочное устройство и пассивное стыковочное устройство. Активное стыковочное устройство содержит активное стыковочное кольцо и стыковочную раму. Активное стыковочное устройство дополнительно содержит три набора буферных механизмов, причем каждый набор буферных механизмов содержит главный буфер, два гаечно-винтовых узла и авто-дифференциальный буфер. Верхний конец и нижний конец гаечно-винтового узла с возможностью перемещения соединены с активным стыковочным кольцом и стыковочной рамой соответственно. Два гаечно-винтовых узла в каждом наборе одновременно приводятся в действие и растягиваются главным буфером, при этом также являясь соединенными друг с другом посредством авто-дифференциального буфера, и выполнены с возможностью относительного регулирования и растяжения посредством авто-дифференциального буфера. Достигается повышение надежности. 2 н. и 11 з.п. ф-лы, 12 ил.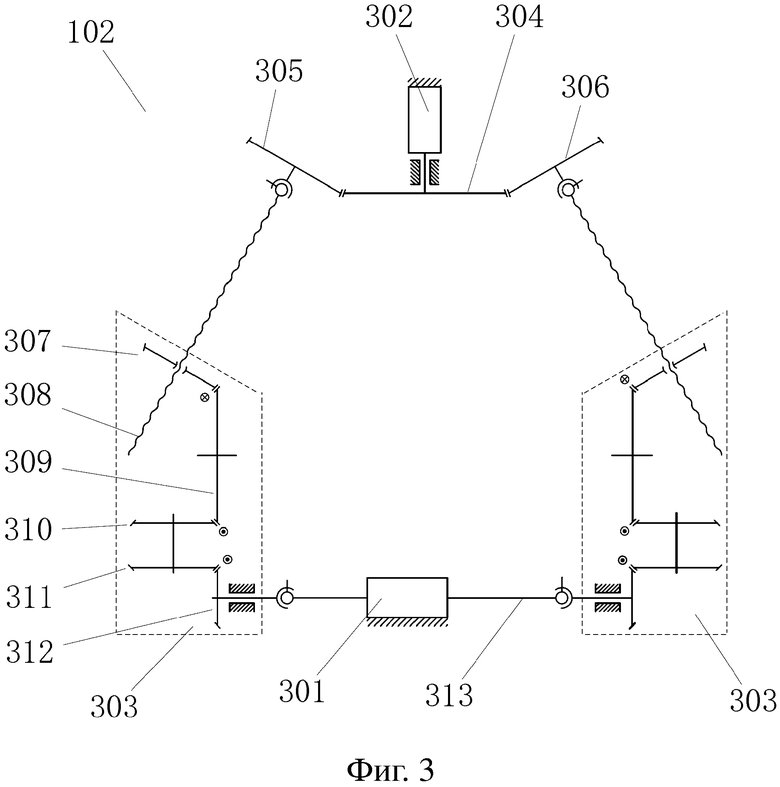
1. Система стыковки космических кораблей, содержащая:
активное стыковочное устройство, содержащее активное стыковочное кольцо и стыковочную раму; и
пассивное стыковочное устройство, причем активное стыковочное устройство дополнительно содержит три набора буферных механизмов, причем каждый набор буферных механизмов содержит главный буфер, два гаечно-винтовых узла и авто-дифференциальный буфер, при этом верхний конец и нижний конец гаечно-винтового узла с возможностью перемещения соединены с активным стыковочным кольцом и стыковочной рамой соответственно;
два гаечно-винтовых узла в каждом наборе одновременно приводятся в действие и растягиваются главным буфером, при этом два гаечно-винтовых узла также соединены друг с другом посредством авто-дифференциального буфера, и два гаечно-винтовых узла выполнены с возможностью относительного регулирования и растяжения посредством автодифференциального буфера.
2. Система стыковки космических кораблей по п. 1, отличающаяся тем, что нижние концы шести гаечно-винтовых узлов равномерно распределены по стыковочной раме, при этом гаечно-винтовые узлы соединены с активным стыковочным кольцом посредством авто-дифференциального буфера, и три авто-дифференциальных буфера равномерно распределены по активному стыковочному кольцу на его периферии.
3. Система стыковки космических кораблей по п. 1, отличающаяся тем, что главный буфер содержит мотор главного буфера и компоненты трансмиссии главного буфера, при этом два гаечно-винтовых узла в каждом наборе приводятся в действие соответствующим мотором главного буфера посредством компонентов трансмиссии главного буфера.
4. Система стыковки космических кораблей по п. 1, отличающаяся тем, что авто-дифференциальный буфер содержит два зубчатых колеса и промежуточную шестерню, при этом каждое зубчатое колесо соединено с одним из гаечно-винтовых узлов, два зубчатых колеса связаны с одной и той же промежуточной шестерней, и промежуточная шестерня дополнительно находится под управлением авто-дифференциального приводного устройства.
5. Система стыковки космических кораблей по п. 4, отличающаяся тем, что авто-дифференциальное приводное устройство содержит мотор авто-дифференциального буфера и/или пружинную структуру, и/или демпфер, и/или фрикционную муфту.
6. Система стыковки космических кораблей по п. 4, отличающаяся тем, что авто-дифференциальное приводное устройство соединено со связанной промежуточной шестерней посредством ускорительного или тормозного устройства.
7. Система стыковки космических кораблей по п. 1, отличающаяся тем, что каждый набор буферных механизмов дополнительно содержит главную фрикционную муфту, при этом главный буфер заставляет гаечно-винтовые узлы растягиваться и сокращаться, только когда главная фрикционная муфта не проскальзывает, причем главная фрикционная муфта приспособлена иметь до захвата такой вращающий момент фрикционной муфты, который меньше, чем вращающий момент фрикционной муфты после выполнения захвата, и при этом главная фрикционная муфта будет проскальзывать, когда ее вращающий момент фрикционной муфты превышен.
8. Система стыковки космических кораблей по п. 1, отличающаяся тем, что каждый набор буферных механизмов дополнительно содержит вспомогательную фрикционную муфту буфера, при этом авто-дифференциальный буфер заставляет гаечно-винтовые узлы выполнять растяжение и сокращение, только когда вспомогательная фрикционная муфта буфера проскальзывает, причем вспомогательная фрикционная муфта буфера приспособлена иметь до захвата такой вращающий момент фрикционной муфты, который меньше, чем вращающий момент фрикционной муфты после выполнения захвата, и при этом вспомогательная фрикционная муфта буфера будет проскальзывать, когда ее вращающий момент фрикционной муфты превышен.
9. Система стыковки космических кораблей по п. 1, отличающаяся тем, что каждый набор буферных механизмов дополнительно содержит датчик смещения винта для регистрации смещения растяжения и сокращения гаечно-винтовых узлов и/или авто-дифференциальный датчик винта для регистрации разницы между смещениями растяжения и сокращения двух гаечно-винтовых узлов в одном и том же наборе, при этом главным буфером и авто-дифференциальным буфером управляют в соответствии с данными, полученными датчиком смещения винта и/или авто-дифференциальным датчиком винта, тем самым удовлетворяя требованиям перемещения в процессе стыковки.
10. Система стыковки космических кораблей по п. 9, отличающаяся тем, что главный буфер выполнен для управления движением растяжения и сокращения гаечно-винтовых узлов посредством вращательного движения, авто-дифференциальный буфер выполнен для осуществления регулирования движений относительного растяжения и сокращения двух гаечно-винтовых узлов посредством вращательного движения, и поворотный датчик положения, потенциометр или круговой датчик положения применяются для реализации датчика смещения винта и/или авто-дифференциального датчика винта.
11. Система стыковки космических кораблей по п. 1, отличающаяся тем, что гаечно-винтовой узел содержит винт, гайку и передаточный механизм, при этом гайка приводится во вращение главным буфером посредством передаточного механизма, винт соответствует гайке, регулируемое растяжение и сокращение выполняются посредством вращения гайки, винт соединен с активным стыковочным кольцом, и два винта в одном и том же наборе выполнены для регулирования корректировки их относительных растяжения и сокращения посредством авто-дифференциального буфера.
12. Система стыковки космических кораблей по п. 1, отличающаяся тем, что дополнительно содержит устройство управления, причем устройство управления управляет главным буфером и авто-дифференциальным буфером в соответствии с зарегистрированным состоянием растяжения и сокращения гаечно-винтовых узлов для удовлетворения требований к движению стыковочного процесса.
13. Способ стыковки космических кораблей с применением системы стыковки космических кораблей по любому из пп. 1–6 и 9–12, включающий этапы, на которых:
S1: главный буфер и/или авто-дифференциальный буфер переводят в режим захвата, и шесть гаечно-винтовых узлов приводят в действие посредством трех главных буферов так, что выталкивается активное стыковочное кольцо;
S2: после того как активное стыковочное кольцо вступает в контакт с пассивным стыковочным устройством, активное стыковочное кольцо отклоняется под усилием взаимодействия, и гаечно-винтовые узлы приводятся в действие и отталкиваются главным буфером и/или авто-дифференциальным буфером в соответствии с данными о растяжении и сокращении гаечно-винтовых узлов, снятыми с главного буфера и/или авто-дифференциального буфера, так, чтобы реализовывать соответствующее направление и выравнивание;
S3: активное стыковочное кольцо и пассивное стыковочное кольцо пассивного стыковочного устройства гибко соединяют посредством захватного устройства, расположенного на них, после выполнения гибкого соединения главный буфер и/или авто-дифференциальный буфер переводят в буферный режим и запускают захватное сенсорное устройство, переходя к этапу S4 или S5;
S4: в соответствии с данными о растяжении и сокращении гаечно-винтовых узлов, снятыми с главного буфера и/или авто-дифференциального буфера, положением растяжения и сокращения гаечно-винтовых узлов управляют посредством главного буфера и/или авто-дифференциального буфера так, чтобы достигать его желаемого положения, при этом положение растяжения и сокращения двух гаечно-винтовых узлов в одном и том же наборе является идентичным; затем осуществляют переход к этапу S6;
S5: два гаечно-винтовых узла выталкиваются в предельное положение, таким образом выполняя вынужденную коррекцию стыковочного кольца; затем осуществляют переход к этапу S6;
S6: активное стыковочное устройство и пассивное стыковочное устройство притягивают ближе с получением точного выравнивания; и
S7: выполняют жесткое соединение и уплотнение.
| US 5040749 A1, 20.08.1991 | |||
| CN 102923318 A, 13.02.2013 | |||
| УСТРОЙСТВО ОТКРЫТИЯ КРЫШКИ ЛЮКА | 2010 |
|
RU2428360C1 |

