Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к плоскостному складскому сооружению, которое включает в себя плоскость размещения складируемых предметов, транспортер для складирования/извлечения и устройство для складирования/извлечения, предназначенное для подъема и транспортирования складируемого предмета между транспортером для складирования/извлечения и заданным местом на плоскости размещения складируемых предметов.
Предшествующий уровень техники
[0002] В плоскостном складском сооружении данного типа, как описано в патентном литературном источнике 1, устройство для складирования/извлечения выполнено с конфигурацией, соответствующей форме складируемого предмета и тому подобного, и, таким образом, при условии, что устройство для складирования/извлечения может манипулировать предметом, складируемые предметы, подлежащие складированию и имеющие разные типоразмеры в плоскости, такие как пластиковый контейнер, имеющий «плоскостные» размеры, который может быть перемещен вручную, могут быть складированы в заданном месте и извлечены из заданного места в пределах плоскости размещения складируемых предметов. Поскольку при этом плоскостное складское сооружение данного типа выполнено с такой конфигурацией, что операция складирования/извлечения выполняется посредством автоматического функционирования устройства для складирования/извлечения, устройство для складирования/извлечения функционирует автоматически так, что складируемые предметы складируются рядом друг с другом, при этом первый приоритет отдается эффективности складирования при условии, что предотвращается ситуация, в которой сталкиваются с проблемой при складировании/извлечении посредством устройства для складирования/извлечения.
Перечень ссылок
Патентная литература
[0003] Патентный литературный источник 1: Опубликованная нерассмотренная заявка на патент Японии № Н7-172762
Сущность изобретения
Техническая проблема
[0004] Тем не менее, естественно, может быть ожидаемой ситуация, в которой устройство для складирования/извлечения не может быть использовано вследствие отказа или технического обслуживания и контроля, поскольку устройство для складирования/извлечения представляет собой механическое оборудование, при этом возникает необходимость в ожидании операции извлечения до тех пор, пока устройство для складирования/извлечения не вернется в состояние, в котором устройство для складирования/извлечения функционирует автоматически обычным образом, и, следовательно, возникают существенные отрицательные последствия для операции, для которой требуется складируемый предмет, подлежащий извлечению. В частности, в том случае, когда складируемый предмет, подлежащий манипулированию, представляет собой пластиковый конвейер «плоскостного» размера, который может быть перемещен вручную, как описано выше, может быть предусмотрено, что складируемый предмет, который необходимо срочно извлечь, будет извлечен вручную. Однако в плоскостном складском сооружении данного типа, как правило, плоская поверхность для размещения складируемых предметов имеет очень большую площадь, и даже если предусмотрен проход для пересечения данной большой зоны размещения складируемых предметов в плоскости, в том случае, когда складируемый предмет, подлежащий срочному извлечению, находится в месте в нескольких метрах от наружной периферии плоскости размещения складируемых предметов или от прохода, оператору потребуется вручную переместить большое число складируемых предметов перед складируемым предметом, подлежащим срочному извлечению, что образовать область прохода для приближения к складируемому предмету, подлежащему срочному извлечению, в результате чего для данной операции потребуются огромные усилия и много времени.
Решение проблемы
[0005] В соответствии с настоящим изобретением предлагается плоскостное складское сооружение, которое может решить обычную проблему, описанную выше, и для легкости понимания взаимосвязи с вариантом осуществления, который будет описан позднее, плоскостное складское сооружение в соответствии с настоящим изобретением будет показано со ссылочными позициями, которые используются при описании варианта осуществления и которые помещены в скобках. Плоскостное складское сооружение включает в себя плоскость (1) размещения складируемых предметов, транспортер (12) для складирования, транспортер (13) для извлечения и устройство (2) для складирования/извлечения, которое поднимает и транспортирует складируемый предмет (С) между заданным местом на плоскости (1) размещения складируемых предметов и транспортером (12) для складирования и транспортером (13) для извлечения, при этом множество областей (PAa1 - PAb3) прохода, разделяющих плоскость (1) размещения складируемых предметов на малые зоны (SАа1 - SАb4), образованы в плоскости (1) размещения складируемых предметов, и, по меньшей мере, один конец областей (PAa1 - PAb3) прохода открывается наружу относительно периферии плоскости (1) размещения складируемых предметов, так что операция ручного перемещения складируемого предмета (С) наружу в малых зонах (SАа1 - SАb4) может выполняться из областей (PAa1 - PAb3) прохода, образующих малые зоны (SАа1 - SАb4).
Предпочтительные эффекты от изобретения
[0006] В соответствии с конфигурацией настоящего изобретения, описанной выше, даже если плоская поверхность для размещения складируемых предметов имеет очень большую площадь, в том случае, когда складируемый предмет, размещенный и хранящийся на плоскости размещения складируемых предметов, должен быть срочно извлечен вручную, оператор может использовать область прохода, которая открывается наружу относительно периферии плоскости размещения складируемых предметов, легко и быстро войти в зону вблизи складируемого предмета, подлежащего срочному извлечению, вручную взять складируемый предмет, подлежащий срочному извлечению, и вынести данный предмет наружу относительно периферии плоскости размещения складируемых предметов. То есть, существует возможность чрезвычайно эффективного и безопасного и легкого выполнения операции ручного извлечения складируемого предмета, который должен быть срочно извлечен.
[0007] Само собой разумеется то, что в том случае, когда вышеописанная операция срочного извлечения складируемого предмета выполняется вручную, независимо от того, где складируемый предмет, подлежащий срочному извлечению, находится в малой зоне в пределах области прохода, ширина и плоскостная форма малой зоны в пределах области прохода предпочтительно заданы такими, чтобы складируемый предмет, подлежащий срочному извлечению, можно было взять непосредственно из области прохода или снаружи относительно периферии плоскости размещения складируемых предметов. Тем не менее, в зависимости от ситуации, даже тогда, когда зона представляет собой малую зону, в которой препятствующие складируемые предметы между складируемым предметом, подлежащим срочному извлечению, и областью прохода или периферией плоскости размещения складируемых предметов должны быть удалены, по сравнению со случаем, когда область прохода отсутствует, можно значительно уменьшить усилия и время, требуемые для ручной операции выноса складируемого предмета, подлежащего срочному извлечению.
[0008] Когда область прохода задана такой, чтобы она соответствовала задаче настоящего изобретения, даже в случае большой плоской поверхности для размещения складируемых предметов, эффективность хранения значительно снижается. Следовательно, в заполненном состоянии, когда складируемые предметы хранятся во всех соответствующих малых зонах, управление устройством для складирования/извлечения предпочтительно осуществляют так, чтобы складируемый предмет был складирован в области прохода от самой внутренней секции области прохода, наиболее удаленной от открытого конца, который открывается наружу относительно периферии плоскости размещения складируемых предметов. В соответствии с данной конфигурацией даже в том случае, когда требуется большое пространство для размещения складируемых предметов, поскольку мало потенциальных возможностей для извлечения, области прохода временно используются для хранения складируемых предметов, и таким образом можно эффективно использовать складское сооружение.
[0009] Кроме того, плоскость размещения складируемых предметов может иметь такую конфигурацию, что плоскость размещения складируемых предметов будет разделена на множество областей хранения в соответствии с размерами складируемых предметов в плоскости, при этом малые зоны создаются в каждой из областей хранения посредством использования областей прохода, и предмет, подлежащий складированию, будет складирован в малой зоне, выбранной в области хранения, совместимой с размером складируемого предмета в плоскости. В соответствии с данной конфигурацией в том случае, когда складируются складируемые предметы, имеющие разные отличающиеся размеры в плоскости, одну совместимую область хранения выбирают из множества областей хранения так, чтобы она соответствовала размеру складируемого предмета, подлежащего складированию, в плоскости, при этом складируемый предмет складируется только в выбранной области хранения, и таким образом можно повысить эффективность хранения на всей плоскости размещения складируемых предметов.
Краткое описание чертежей
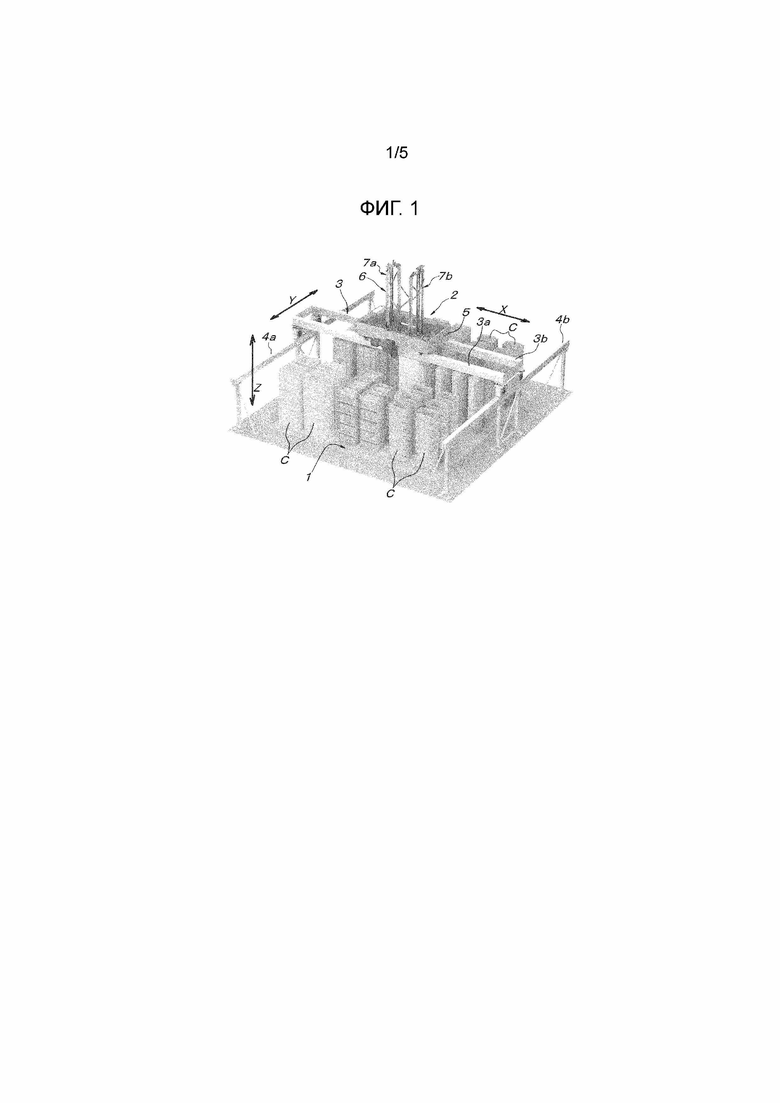
[0010] [Фиг.1] Фиг.1 представляет собой вид в перспективе, показывающий пример конфигурации всего складского сооружения.
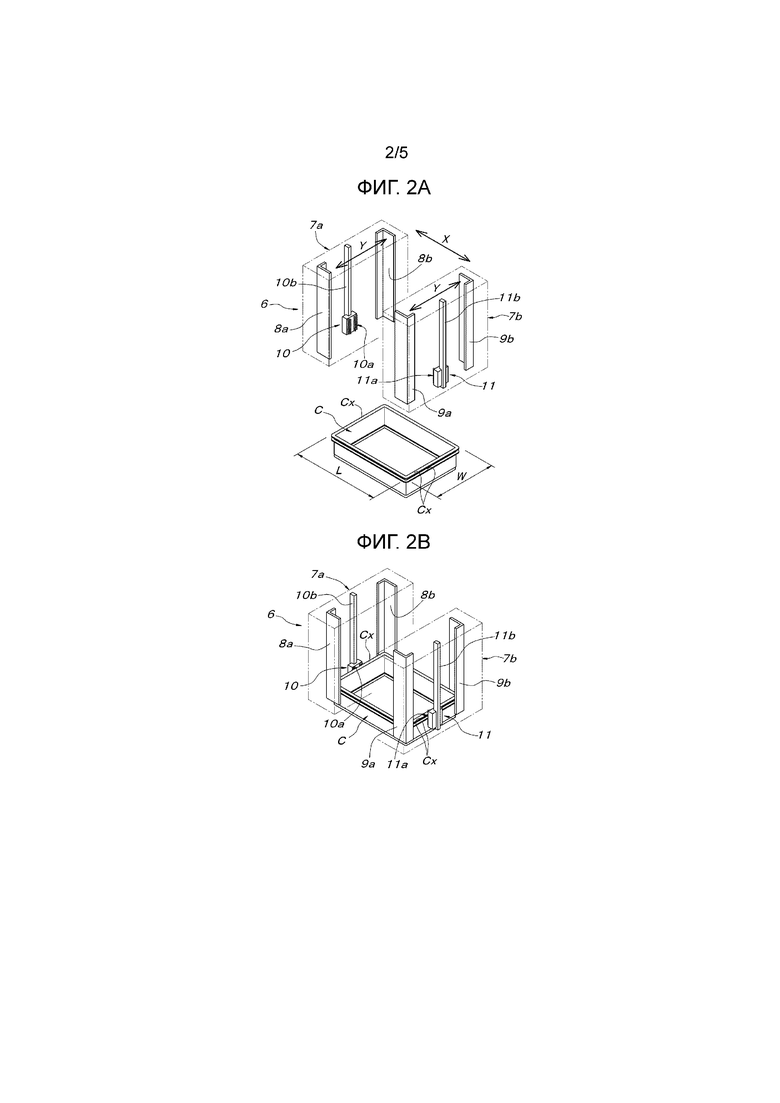
[Фиг.2] Фиг.2А представляет собой вид в перспективе, показывающий средства захвата складируемых предметов, предусмотренные в устройстве для складирования/извлечения, и складируемый предмет в складском сооружении, и фиг.2В представляет собой вид в перспективе, показывающий состояние, в котором средство захвата складируемых предметов захватывает складируемый предмет.
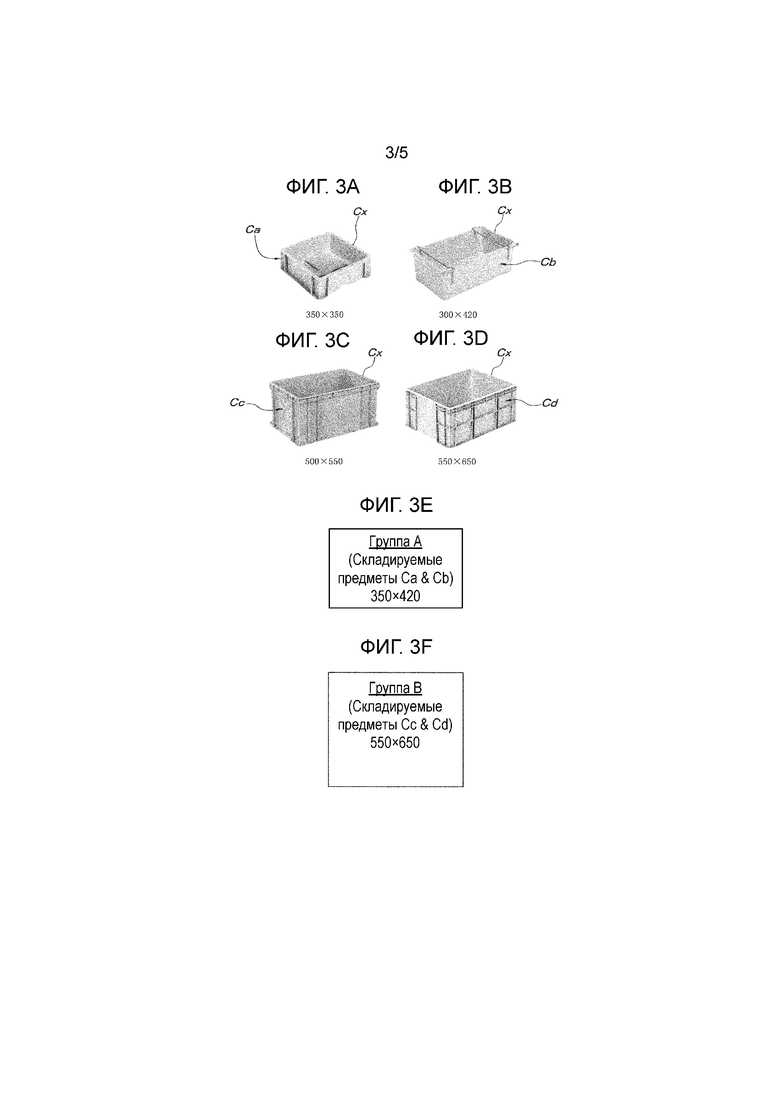
[Фиг.3] Фиг.3А-3D представляют собой виды в перспективе, показывающие четыре типа складируемых предметов, имеющих разные размеры в плоскости, и фиг.3Е и 3F представляют собой схематические изображения, иллюстрирующий максимальные размеры складируемых предметов из отдельных групп в плоскости, когда четыре типа складируемых предметов разделены на две группы.
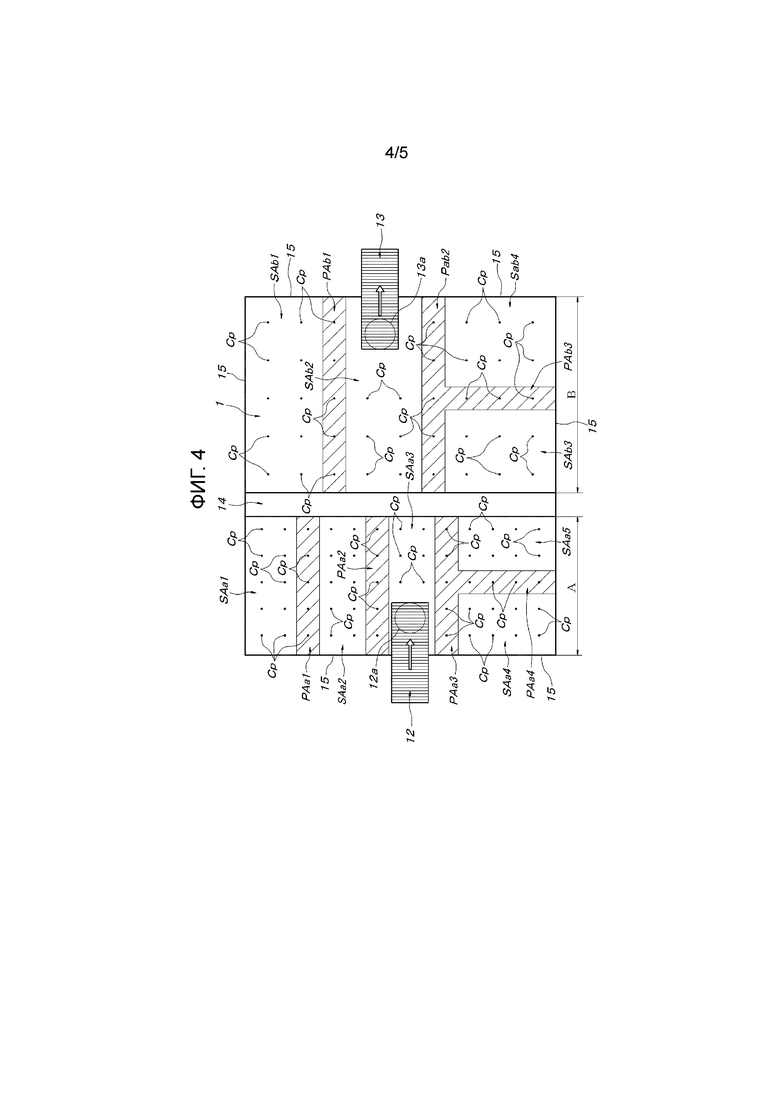
[Фиг.4] Фиг.4 представляет собой вид в плане, иллюстрирующий пример задания варианта осуществления складского сооружения согласно настоящему изобретению.
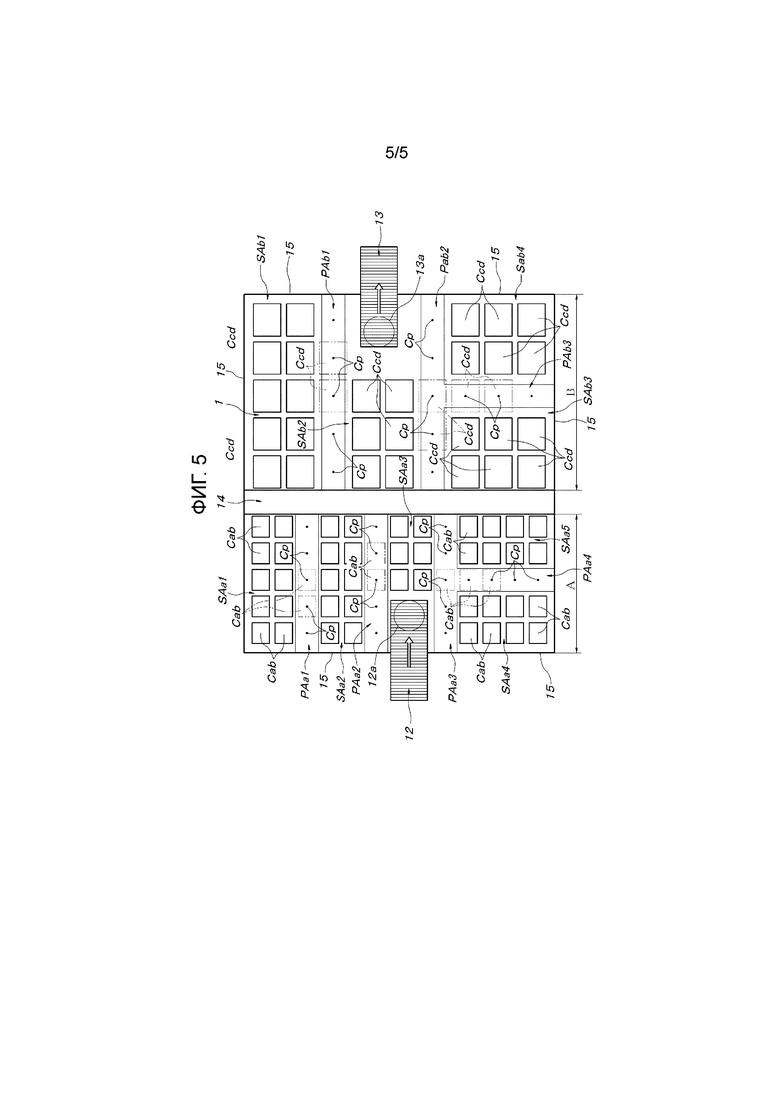
[Фиг.5] Фиг.5 представляет собой вид в плане, иллюстрирующий состояние использования варианта осуществления.
Описание вариантов осуществления
[0011] На фиг.1 ссылочная позиция 1 обозначает прямоугольную плоскость размещения складируемых предметов, и ссылочная позиция 2 обозначает устройство для складирования/извлечения. Ссылочная позиция 3 обозначает элемент, перемещающийся в боковом направлении Y, и элемент 3, перемещающийся в боковом направлении y, включает в себя две направляющие 3а и 3b, параллельные направлению X (направлению влево/вправо). Ссылочные позиции 4а и 4b обозначают пару неподвижных направляющих, которые расположены параллельно направлению Y с обеих - наружных в направлении Х - сторон плоскости 1 размещения складируемых предметов, и две неподвижные направляющие 4а и 4b обеспечивают опору для обеих концевых - в направлении Х - частей элемента 3, перемещающегося в боковом направлении Y, так что элемент 3, перемещающийся в боковом направлении Y, свободно перемещается параллельно направлению Y (направлению вперед/назад) на определенной высоте над плоскостью 1 размещения складируемых предметов. Устройство 2 для складирования/извлечения выполнено с конфигурацией с кареткой 5, которая опирается на две направляющие 3а и 3b элемента 3, перемещающегося в боковом направлении Y, с возможностью свободного перемещения в направлении Х, и со средством 6 захвата складируемых предметов, которое опирается на каретку 5 с возможностью свободного подъема и опускания.
[0012] Несмотря на то, что в качестве средств 6 захвата складируемых предметов могут быть предусмотрены различные их типы, которые выполнены с конфигурацией, совместимой со складируемыми предметами, подлежащими манипулированию, средство 6 захвата складируемых предметов в данном варианте осуществления включает в себя два захватных устройства 7А и 7В, перемещающиеся в направлении Х, так что захватные устройства 7А и 7В свободно приближаются друг к другу и удаляются друг от друга в направлении Х. Оба захватных устройства 7А и 7В опираются на каретку 5 с возможностью их подъема и опускания между двумя направляющими 3а и 3b элемента 3, перемещающегося в боковом направлении Y, и с возможностью их свободного подъема и опускания синхронно друг с другом и включают в себя предусмотренные в направлении Y пары захватных столбчатых элементов 8а-9b и подъемники 10 и 11, расположенные в центре месте между захватными столбчатыми элементами 8а и 8b и в центре между захватными столбчатыми элементами 9а и 9b. Складируемый предмет С, который подвергается загрузке/выгрузке и транспортировке в данном варианте осуществления, представляет собой прямоугольный пластиковый транспортировочный контейнер, который имеет в плоскости ширину W в направлении Y и длину L в направлении Х и включает в себя на наружной поверхности выступающее ребро Сх жесткости, которое является непрерывным на всей периферии.
[0013] Соответствующие захватные столбчатые элементы 8а-9b представляют собой столбчатые элементы, которые могут быть установлены снаружи вокруг четырех углов складируемого предмета С и горизонтальное сечение которых образовано с формой буквы L, и средства 10а и 11а контактного взаимодействия, которые свободно входят в контактное взаимодействие и выходят из контактного взаимодействия с выступающим ребром Сх жесткости в центральных частях обеих сторон складируемого предмета С, параллельных направлению Y, предусмотрены в подъемниках 10 и 11 с, по меньшей мере, внутренних сторон нижних концевых частей столбчатых элементов 10b и 11b для подъема/опускания. Средства 10а и 11а контактного взаимодействия включают в себя большое число штырей, которые выступают от вертикальных прямоугольных поверхностей, параллельных направлению Y, и которые параллельны направлению Х, и соответствующие штыри удерживаются в выступающем положении, в котором штыри выступают внутрь, посредством пружин.
[0014] В складском сооружении, выполненном с вышеописанной конфигурацией, посредством бокового перемещения элемента 3, перемещающегося в боковом направлении Y, в направлении Y и перемещения каретки 5 на элементе 3, перемещающемся в боковом направлении Y, в направлении Х средство 6 захвата складируемых предметов может быть перемещено до определенной высоты над заданным местом (включая концевую часть для завершения транспортировки для складирования и концевую часть для начала транспортировки для извлечения, которые будут описаны позднее) в плоскости 1 размещения складируемых предметов. С другой стороны, средство 6 захвата складируемых предметов может быть переключено между состоянием прекращения захвата и состоянием захвата. В состоянии прекращения захвата в средстве 6 захвата складируемых предметов захватные устройства 7А и 7В находятся в предельном положении отвода в направлении Х, в котором захватные устройства 7А и 7В отделены друг от друга в направлении Х, и захватные столбчатые элементы 8а-9b находятся в предельном положении отвода в направлении Y, в котором захватные столбчатые элементы 8а-9b расположены на расстоянии друг от друга относительно подъемников 10 и 11 в направлении Y. В состоянии захвата в средстве 6 захвата складируемых предметов захватные устройства 7А и 7В перемещены до расстояния, соответствующего длине L складируемого предмета С в направлении Х, для приближения их друг к другу в направлении Х, и одновременно соответствующие захватные столбчатые элементы 8а-9b перемещены до расстояния, соответствующего ширине W складируемого предмета С в направлении Y, для приближения их друг к другу относительно подъемников 10 и 11 в направлении Y, и, как показано на фиг.2В, четыре захватных столбчатых элемента 8а-9b устанавливаются снаружи у четырех углов складируемого предмета С для размещения складируемого предмета С в заданном положении, и одновременно соответствующие средства 10а и 11а контактного взаимодействия двух подъемников 10 и 11 вводятся в контактное взаимодействие с выступающим ребром Сх жесткости на наружной поверхности складируемого предмета С, параллельной направлению Y. В состоянии, в котором средства 10а и 11а контактного взаимодействия введены в контактное взаимодействие с выступающим ребром Сх жесткости в складируемом предмете С, по меньшей мере, два штыря на одной и той же высоте в выступающем положении в соответствующих средствах 10а и 11а контактного взаимодействия входят с нижней стороны выступающего ребра Сх жесткости в складируемом предмете С, и штыри, которые сталкиваются с выступающим ребром Сх жесткости, переводятся в состояние, в котором они отведены при преодолении воздействия поджимающей силы.
[0015] Когда складируемый предмет С перемещается средством 6 захвата складируемых предметов между заданными двумя местами (включая концевую часть для завершения транспортировки для складирования и концевую часть для начала транспортировки для извлечения, которые будут описаны позднее) на плоскости 1 размещения складируемых предметов, средство 6 захвата складируемых предметов перемещается в положение непосредственно над складируемым предметом С, подлежащим извлечению, посредством бокового перемещения элемента 3, перемещающегося в боковом направлении Y, в направлении Y и перемещения каретки 5 на элементе 3, перемещающемся в боковом направлении Y, в направлении Х. Затем захватные устройства 7А и 7В средства 6 захвата складируемых предметов в состоянии прекращения захвата опускаются до высоты складируемого предмета С, подлежащего извлечению, относительно каретки 5, и после этого средство 6 захвата складируемых предметов переключается в состояние захвата. Следовательно, как показано на фиг.2В, четыре захватных столбчатых элемента 8а-9b устанавливаются снаружи у четырех углов складируемого предмета С для установки складируемого предмета С в заданном положении, и одновременно соответствующие средства 10а и 11а контактного взаимодействия двух подъемников 10 и 11 вводятся в контактное взаимодействие с выступающим ребром Сх жесткости в складируемом предмете С, после этого средство 6 захвата складируемых предметов в состоянии захвата поднимается до предельной высоты подъема относительно каретки 5 или до такой высоты, чтобы отсутствовали препятствия горизонтальному перемещению складируемого предмета С.
[0016] Складируемый предмет С, подлежащий извлечению, поднимают до заданной высоты, как описано выше, после этого складируемый предмет С, захваченный средством 6 захвата складируемых предметов, перемещается в горизонтальном направлении до заданного места опускания посредством бокового перемещения элемента 3, перемещающегося в боковом направлении Y, в направлении Y и перемещения каретки 5 на элементе 3, перемещающемся в боковом направлении Y, в направлении Х. Боковое перемещение элемента 3, перемещающегося в боковом направлении Y, и перемещение каретки 5 могут выполняться одновременно с процессом подъема складируемого предмета С, подлежащего извлечению, до заданной высоты. После этого средство 6 захвата складируемых предметов, захватывающее складируемый предмет С, опускается до заданной высоты относительно каретки 5, затем средство 6 захвата складируемых предметов в состоянии захвата переключается в состояние прекращения захвата, и, таким образом, складируемый предмет С освобождается от средства 6 захвата складируемых предметов, в результате чего существует возможность опускания складируемого предмета С в заданное место. После этого средство 6 захвата складируемых предметов в состоянии прекращения захвата поднимается до заданной высоты относительно каретки 5, и, таким образом, завершается последовательность этапов подъема и перемещения складируемого предмета.
[0017] Следует отметить, что в том случае, когда складируемые предметы С могут быть штабелированы, множество складируемых предметов С в штабелированном состоянии могут быть вместе подняты и перемещены посредством захвата самого нижнего складируемого предмета С средством 6 захвата складируемых предметов. Несмотря на то, что в данный момент подъемники 10 и 11 средства 6 захвата складируемых предметов поднимают только самый нижний складируемый предмет С, поскольку четыре угла всех складируемых предметов С в штабелированном состоянии, включая самый нижний складируемый предмет С, размещены в заданном положении посредством четырех захватных столбчатых элементов 8а-9b, штабелированное состояние стабильно поддерживается. Само собой разумеется то, что для манипулирования большим числом штабелированных складируемых предметов в подъемниках 10 и 11 средства 10а и 11а контактного взаимодействия также могут быть предусмотрены в вертикальном направлении в виде множества ступеней на столбчатых элементах 10b и 11b для подъема/опускания. При работе средства 6 захвата складируемых предметов также можно переместить наружу только конкретный складируемый предмет С из множества складируемых предметов С в штабелированном состоянии и снова разместить другой складируемый предмет С на складируемом предмете С, хранящемся на плоскости 1 размещения складируемых предметов.
[0018] Когда предполагается, что в качестве складируемых предметов С, которые подвергаются манипулированию в складском сооружении, описанном выше, например, подобных показанным на фиг.3А-3D, имеются четыре складируемых предмета Са-Сd, имеющие разные размеры в плоскости, они подразделяются на группы в соответствии с размерами в плоскости так, что складируемые предметы Са и Сb, размеры которых в плоскости находятся в пределах 350 мм × 420 мм, относят к группе А, и складируемые предметы Сс и Сd, размеры которых превышают 350 мм × 420 мм и находятся в пределах 550 мм × 650 мм, относят к группе В. С другой стороны, хотя это не показано на фиг.1, плоскость 1 размещения складируемых предметов, как показано на фиг.4, является по существу прямоугольной, и транспортер 12 для складирования и транспортер 13 для извлечения также предусмотрены. Транспортер 12 для складирования и транспортер 13 для извлечения выполнены так, что концевая часть 12а для завершения транспортировки для складирования и концевая часть 13а для начала транспортировки для извлечения «входят» от сторон плоскости 1 размещения складируемых предметов в ее внутреннюю часть. Несмотря на то, что транспортер 12 для складирования и транспортер 13 для извлечения могут быть предусмотрены в заданных местах вокруг плоскости 1 размещения складируемых предметов, на фигуре они предусмотрены отдельно у двух сторон плоскости 1 размещения складируемых предметов, параллельных друг другу. Несмотря на то, что имеет место ситуация, когда на плоскости 1 размещения складируемых предметов имеется неиспользуемая область 14, которая не может быть использована в качестве поверхности для размещения складируемых предметов, такая как область прохода, которая пересекает плоскость 1 размещения складируемых предметов, в случае наличия подобной неиспользуемой области 14 и тому подобного зона, отличная от неиспользуемой области 14, подразделяется на область А хранения для складирования складируемых предметов Саb группы А и область В хранения для складирования складируемых предметов Ссd группы В. Соотношение площадей между областями А и В хранения задается произвольно в соответствии с объемом складируемых предметов Саb группы А и складируемых предметов группы В при манипулировании. В примере по фигуре области А и В хранения разделены границей, которая представляет собой проход, служащий в качестве неиспользуемой области 14.
[0019] Несмотря на то, что в области А хранения поверхности для размещения складируемых предметов, размер которых в плоскости составляет 350 мм × 420 мм, выровнены в виде сетки с фиксированной ориентацией, и в области В хранения поверхности для размещения складируемых предметов, размер которых в плоскости составляет 550 мм × 650 мм, выровнены в виде сетки с фиксированной ориентацией, между соответствующими поверхностями для размещения складируемых предметов обеспечивается зона зазора, которая имеет такую ширину, чтобы захватные столбчатые элементы 8а-9b средства 6 захвата складируемых предметов и подъемники 10 и 11 могли выполнять захват и прекращение захвата складируемого предмета на поверхности для размещения складируемых предметов без препятствий. На всех поверхностях для размещения складируемых предметов в пределах областей А и В хранения точки Ср размещения складируемых предметов заданы в их центрах. В программе управления устройством 2 для складирования/извлечения абсолютные адреса (например, значения координат X-Y) заданы для всех точек Ср размещения складируемых предметов на плоскости 1 размещения складируемых предметов, включая точки размещения складируемых предметов в концевой части 12а для завершения транспортировки для складирования и концевой части 13а для начала транспортировки для извлечения. С другой стороны, опорная точка для складирования/извлечения на устройстве 2 для складирования/извлечения представляет собой центральную точку на виде в плане складируемого предмета С, который захватывается средством 6 захвата складируемых предметов, другими словами, центральную точку прямоугольной плоскости, окруженной четырьмя захватными столбчатыми элементами 8а-9b, и захват и прекращение захвата складируемого предмета С во время операции складирования/извлечения выполняются в состоянии, в котором опорная точка для складирования/извлечения на устройстве 2 для складирования/извлечения соответствует точке Ср размещения складируемого предмета на плоскости 1 размещения складируемых предметов на виде в плане.
[0020] Периферия плоскости 1 размещения складируемых предметов окружена присоединяемым/отсоединяемым ограждением 15, и области А и В хранения в пределах плоскости 1 размещения складируемых предметов разделены на малые зоны SАа1-SАа5 и SАb1-SАb4, каждая из которых включает в себя множество точек Ср размещения складируемых предметов. Каждая из малых зон SАа1-SАb4 образована с формой прямоугольника, который окружен ограждением 15 вокруг плоскости 1 размещения складируемых предметов, проходом, служащим в качестве неиспользуемой области 14, и зонами РАа1-PАа4 и РАb1-PАb3. Каждая из областей РАа1-PАb3 прохода образована линейной так, что она «занимает» множество поверхностей для размещения складируемых предметов (точек Ср размещения складируемых предметов), соединенных последовательно в продольном направлении или поперечном направлении, и области РАа1-PАb3 прохода обеспечивают соединение, например, между ограждением 15 вокруг плоскости 1 размещения складируемых предметов и проходом, служащим в качестве неиспользуемой области 14, и между промежуточными местами остальных областей РАа3 и РАb2 прохода в направлении длины и ограждением 15 вокруг плоскости 1 размещения складируемых предметов, и существует возможность свободного входа в области прохода и выхода из них через проход, служащий в качестве неиспользуемой области 14, или снаружи относительно периферии плоскости 1 размещения складируемых предметов в состоянии, в котором ограждение 15 отсоединено.
[0021] Следует отметить, что, несмотря на то, что это не показано на фиг.4, когда зона плоскости 1 размещения складируемых предметов имеет даже бóльшую площадь, области прохода также могут быть образованы так, что из областей РАа1-PАb3 прохода две области прохода, расположенные рядом друг с другом, будут соединены. Также существует возможность создания области прохода, один конец которой закрыт малыми зонами SАа1-SАb4. Кроме того, несмотря на то, что на фиг.4 каждая из малых зон SАа1-SАb4 образована с такой шириной, что точно размещаются две поверхности для размещения складируемых предметов, например, в случае, в котором размеры складируемого предмета в плоскости малы, также существует возможность увеличения ширины так, чтобы точно размещались три или более поверхностей для размещения складируемых предметов. Аналогичным образом, несмотря на то, что каждая из областей РАа1-PАb3 прохода, показанных на фиг.4, выполнена с такой шириной, что точно размещается одна поверхность для размещения складируемого предмета, например, в случае, когда размер складируемого предмета в плоскости мал, также существует возможность увеличения ширины так, чтобы точно размещались две или более поверхностей для размещения складируемых предметов.
[0022] Управляющее устройство для автоматического управления устройством 2 для складирования/извлечения запрограммировано для выбора в качестве точек Ср размещения складируемых предметов в зоне, предназначенной для хранения складируемых предметов Саb и Сcd, подлежащих складированию, только точек Ср размещения складируемых предметов в малых зонах SАа1-SАb4, исключая точки Ср размещения складируемых предметов в областях РА прохода. То есть, когда складируемый предмет Саb группы А, который должен складироваться в области А хранения, направляется в концевую часть 12а для завершения транспортировки для складирования на транспортере 12 для складирования, осуществляется поиск находящейся в пустом состоянии точки Ср размещения складируемого предмета в малых зонах SАа1-SАb5 в пределах области А хранения, и устройство 2 для складирования/извлечения автоматически функционирует, как описано выше, так, что в точке Ср размещения складируемого предмета, поиск которой выполнялся, осуществляется складирование складируемого предмета Саb группы А, находящегося на концевой части 12а для завершения транспортировки для складирования. Кроме того, когда складируемый предмет Сcd группы В, который должен складироваться в области В хранения, направляется в концевую часть 12а для завершения транспортировки для складирования, осуществляется поиск находящейся в пустом состоянии точки Ср размещения складируемого предмета в малых зонах SАb1-SАb5 в пределах области В хранения, и устройство 2 для складирования/извлечения автоматически функционирует, как описано выше, так, что в точке Ср размещения складируемого предмета, поиск которой выполнялся, осуществляется складирование складируемого предмета Сcd группы В, находящегося на концевой части 12а для завершения транспортировки для складирования.
[0023] Следует отметить, что в том случае, когда осуществляется поиск находящихся в пустом состоянии точек Ср размещения складируемых предметов в областях, предназначенных для складируемых предметов Саb и Сcd, подлежащих складированию, могут рассматриваться следующие методы установки значений:
1) Независимо от малых зон SАа1-SАа5 в пределах области А хранения или малых зон SАb1-SАb4 в пределах области В хранения, выбирают точку Ср размещения складируемого предмета, находящуюся в пустом состоянии, которая является самой ближней или самой дальней относительно опорной точке складирования, которая была задана простым образом, например, опорной точке складирования, которая была задана в пределах области центральной части плоскости 1 размещения складируемых предметов.
2) Опорную точку складирования задают заранее в виде одного угла из всех малых зон SАа1-SАb4, и приоритеты во время складирования заранее задают для малых зон SАа1-SАа5 в пределах области А хранения или малых зон SАb1-SАb4 в пределах области В хранения, и среди находящихся в пустом состоянии точек Ср размещения складируемых предметов в пределах малой зоны с наивысшим приоритетом во время складирования выбирают находящуюся в пустом состоянии точку Ср размещения складируемого предмета, которая является самой ближней или самой дальней относительно опорной точке складирования.
2а) Вышеописанные приоритеты во время складирования для малых зон SАb1-SАb4 задают так, чтобы в том случае, когда больше нет находящихся в пустом состоянии точек Ср размещения складируемых предметов в пределах малой зоны с более высоким приоритетом, выполнялся поиск находящихся в пустом состоянии точек Ср размещения складируемых предметов в малой зоне с более низким приоритетом, и так, чтобы отдельные малые зоны оказывались в заполненном состоянии в порядке приоритетов.
2b) Вышеописанные приоритеты во время складирования для малых зон SАb1-SАb4 задают так, чтобы складируемые предметы складировались в отдельных малых зонах по одному (один складируемый предмет или штабелированные складируемые предметы) в порядке приоритетов.
[0024] С другой стороны, поскольку операцию извлечения, то есть операцию извлечения, при которой складируемый предмет, подлежащий извлечению, поднимают посредством устройства 2 для складирования/извлечения на концевую часть 13а для начала транспортировки для извлечения на транспортере 13 для извлечения и транспортируют, выполняют в любой момент времени отдельно от операции складирования, когда операция складирования начинается, точка Ср размещения складируемого предмета, находящаяся в пустом состоянии, обычно также может иметься в пределах зоны, в которой складируемый предмет предпочтительно и ранее складирован. В такой ситуации выполняют поиск точек Ср размещения складируемых предметов в заданной зоне, включающей точки Ср размещения складируемых предметов, находящиеся в пустом состоянии после извлечения, и, таким образом, складируемые предметы Саb и Ссd складируют в месте точек Ср размещения складируемых предметов после извлечения и поиска.
[0025] Несмотря на то, что в складском сооружении в варианте осуществления, описанном выше, операция складирования/извлечения складируемого предмета обычно автоматически выполняется посредством автоматической работы устройства 2 для складирования/извлечения, в том случае, когда становится необходимым выполнить срочную операцию извлечения при невозможности использования устройства 2 для складирования/извлечение вследствие отказа или регулярного технического обслуживания и контроля или тому подобного, оператор входит в зону плоскости 1 размещения складируемых предметов для того, чтобы вручную вынести складируемый предмет Саb или Сcd, подлежащий срочному извлечению. В случае выполнения ручной срочной операции извлечения место, в котором хранится складируемый предмет Саb или Сcd, подлежащий срочному извлечению, может быть обнаружено посредством поиска в базе данных, регистрирующей состояние хранения. То есть, поскольку можно обнаружить, в какой из малых зон SАb1-SАb4 в области А или В хранения складируемый предмет Саb или Сcd, подлежащий срочному извлечению, имеется в точке Ср размещения складируемого предмета, оператор может войти в одну из областей РАа1-PАb3 прохода, соседнюю с заданной малой зоной, или в проход, служащий в качестве неиспользуемой области 14, и из одной из областей РАа1-PАb3 прохода или из прохода, служащего в качестве неиспользуемой области 14, извлечь складируемый предмет Саb или Сcd, размещенный в точке Ср размещения складируемого предмета в пределах заданной малой зоны, использовать данную одну из областей РАа1-PАb3 прохода или проход, служащий в качестве неиспользуемой области 14, и тем самым вынести предмет наружу относительно плоскости 1 размещения складируемых предметов.
[0026] Следует отметить, что при входе в данную одну из областей РАа1-PАb3 прохода или в проход, служащий в качестве неиспользуемой области 14, и выходе из данной одной из областей РАа1-PАb3 прохода или из прохода, служащего в качестве неиспользуемой области 14, часть ограждения 15 отсоединяют. В том случае, когда складируемый предмет Саb или Сcd, подлежащий срочному извлечению, находится рядом с внутренней стороной ограждения 15, отсоединяют часть ограждения 15, которая находится рядом со складируемым предметом Саb или Сcd, и, таким образом, также существует возможность извлечения складируемого предмета Саb или Сcd, подлежащего срочному извлечению, непосредственно снаружи относительно периферии плоскости 1 размещения складируемых предметов. Само собой разумеется то, что в том случае, когда вход/выход для данной одной из областей РАа1-PАb3 прохода или для прохода, служащего в качестве неиспользуемой области 14, которая/который выбрана/выбран, закрыт ограждением 15, часть ограждения 15 отсоединяют.
[0027] В ситуации, когда операция складирования/извлечения складируемых предметов выполняется автоматически посредством автоматического функционирования устройства 2 для складирования/извлечения, когда общее число складируемых предметов, извлекаемых в единицу времени, превышает общее число складируемых предметов, подвергающихся складированию, в конце концов, как показано на фиг.5, все малые зоны SАа1-SАа5 в пределах области А хранения или все малые зоны SАb1-SАb4 в пределах области В хранения могут оказаться заполненными складируемыми предметами Саb или Сcd. В таком случае, как показано воображаемыми линиями на фиг.5, складируемые предметы Саb складируются в точках Ср размещения складируемых предметов в областях РАа1-PАа4 прохода в области А хранения, и складируемые предметы Ссd складируются в точках Ср размещения складируемых предметов в областях РАb1-PАb3 прохода в области В хранения, и, таким образом, существует возможность эффективного использования пустого пространства. В этом случае предпочтительно складировать складируемые предметы рядом друг с другом не со стороны прохода, служащего в качестве неиспользуемой зоны 14, или со стороны входа/выхода, который открывается к стороне ограждения 15 в каждой из областей РАа1-PАb3 прохода, а со стороны внутренней концевой секции, самой удаленной от входа/выхода в каждой из областей РАа1-PАb3 прохода.
[0028] Следует отметить, что способ складирования с образованием областей хранения, соответствующих размерам складируемых предметов в плоскости, и разделением областей хранения, которые представляют собой заданные места хранения, в соответствии с размерами складируемых предметов, подлежащих складированию, в плоскости, который описан в варианте осуществления, может быть выбран необходимым образом и не является особенно существенным для настоящего изобретения. Кроме того, места расположения транспортера для складирования и транспортера для извлечения, предусмотренных вместе на плоскости размещения складируемых предметов, задаются свободно в соответствии с ситуацией, и в зависимости от ситуации может быть использован транспортер, который служит в качестве как транспортера для складирования, так и транспортера для извлечения. Само собой разумеется то, что наличие неиспользуемой зоны 14, такой как проход, также несущественно для настоящего изобретения. Кроме того, проиллюстрировано складское сооружение, в котором присоединяемое/отсоединяемое ограждение 15 отсоединяется так, что существует возможность входа в зону плоскости 1 размещения складируемых предметов из желательного места вокруг нее, при этом в том случае, когда вокруг плоскости 1 размещения складируемых предметов вместо ограждения 15 предусмотрена зафиксированная окружающая стенка, такая как стена здания, область прохода может быть образована вдоль внутренней стороны зафиксированной окружающей стенки, и в зависимости от ситуации существует возможность уменьшения ширины малой зоны так, что все складируемые предметы в малой зоне могут быть взяты вручную только из области прохода с данной внутренней стороны.
Промышленная применимость
[0029] Плоскостное складское сооружение по настоящему изобретению может быть использовано в качестве складского сооружения для транспортировочных контейнеров коробчатой формы, которые могут быть размещены и складированы на плоскости, в частности, для складируемых предметов, которые являются сравнительно небольшими и достаточно легкими для их перемещения вручную.
Перечень ссылочных позиций
[0030] 1 Плоскость размещения складируемых предметов
2 Устройство для складирования/извлечения
3 Элемент, перемещающийся в боковом направлении Y
3а - 4b Направляющая
5 Каретка
6 Средство захвата складируемых предметов
7А, 7В Захватное устройство
8а - 9b Захватный столбчатый элемент
10, 11 Подъемник
10а, 11а Средство контактного взаимодействия
10b, 11b Столбчатый элемент для подъема/опускания
12 Транспортер для складирования
12а Концевая часть для завершения транспортировки для складирования
13 Транспортер для извлечения
13а Концевая часть для начала транспортировки для извлечения
14 Неиспользуемая зона, такая как проход
15 Присоединяемое/отсоединяемое ограждение
А, В Область хранения
С Складируемый предмет
Сх Выступающее ребро жесткости
Са-Сd Складируемые предметы, имеющие разные размеры в плоскости
Саb Складируемый предмет группы А
Ссв Складируемый предмет группы В
Ср Точка размещения складируемого предмета
РАа1-PАb3 Область прохода
SАа1-SАb4 Малая зона
Данное плоскостное складское сооружение предусмотрено с устройством для складирования/извлечения, предназначенным для подвешивания и транспортирования складируемых предметов между заданным местом на плоскости (1) размещения складируемых предметов и транспортером (12) для складирования и транспортером (13) для извлечения. Множество областей (РАа1-PАb3) прохода, разделяющих плоскость (1) размещения складируемых предметов на малые зоны (SАа1-SАb4), образованы в плоскости (1) размещения складируемых предметов. По меньшей мере, один конец областей прохода открывается наружу относительно периферии плоскости (1) размещения складируемых предметов. Задача выгрузки складируемых предметов вручную в малых зонах (SАа1-SАb4) может быть выполнена из областей (РАа1-PАb3) прохода, образующих малые зоны (SАа1-SАb4). Изобретение обеспечивает уменьшение времени извлечения складируемых предметов. 2 з.п. ф-лы, 11 ил.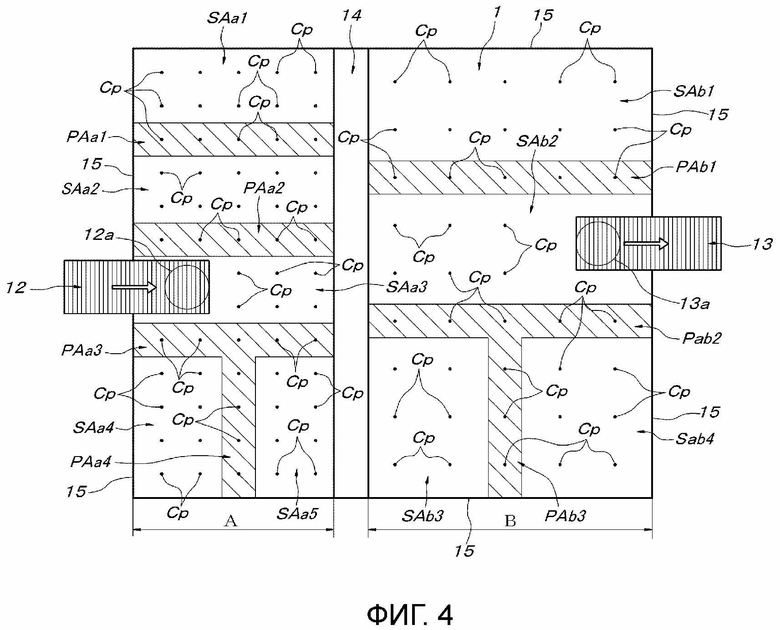
1. Плоскостное складское сооружение, содержащее:
плоскость размещения складируемых предметов;
транспортер для складирования;
транспортер для извлечения и
устройство для складирования/извлечения, которое поднимает и транспортирует складируемый предмет между заданным местом на плоскости размещения складируемых предметов и транспортером для складирования и транспортером для извлечения,
при этом в плоскости размещения складируемых предметов образовано множество областей прохода, разделяющих плоскость размещения складируемых предметов на малые зоны, причем по меньшей мере один конец областей прохода открывается наружу относительно периферии плоскости размещения складируемых предметов и выполнен таким образом, что операция ручного перемещения наружу складируемого предмета в малых зонах может быть выполнена из областей прохода, образующих малые зоны,
причем при заполненном состоянии, когда складируемые предметы хранятся во всех соответствующих малых зонах, управление устройством для складирования/извлечения осуществляется так, что складируемый предмет может быть складирован в области прохода от самой внутренней секции области прохода, наиболее удаленной от открытого конца, который открывается наружу относительно периферии плоскости размещения складируемых предметов.
2. Плоскостное складское сооружение по п.1,
в котором каждая из малых зон задана с такой площадью, что операция ручного перемещения наружу складируемого предмета в малой зоне может быть выполнена из области прохода или снаружи относительно периферии плоскости размещения складируемых предметов без входа оператора в малую зону.
3. Плоскостное складское сооружение по п.1 или 2,
в котором плоскость размещения складируемых предметов разделена на множество областей хранения в соответствии с плоскостными размерами складируемых предметов, малые зоны созданы в каждой из областей хранения посредством областей прохода и складируемый предмет, подлежащий складированию, складируется в малой зоне, выбранной в пределах области хранения, совместимой с плоскостным размером складируемого предмета.
| US 6315513 B1, 13.11.2001 | |||
| Система складирования продуктов с использованием несущих элементов | 1981 |
|
SU1271369A3 |
| US 6062400 A1, 16.05.2000 | |||
| EP 2937299 A1, 28.10.2015 | |||
| Гидроподъемник буровой установки | 1983 |
|
SU1122806A1 |

