11
Изобретение относится к оборудованию складовштучных грузов и касаетс установок проходного стеллажного складирования, в которой складируемые товары хранятся на передвижных складских и транспортных поддо нах на направляющих рельсах гравитационного стеллажа, имеющего толкающие штанги.
Цель изобретения - повышение удобства эксплуатации.
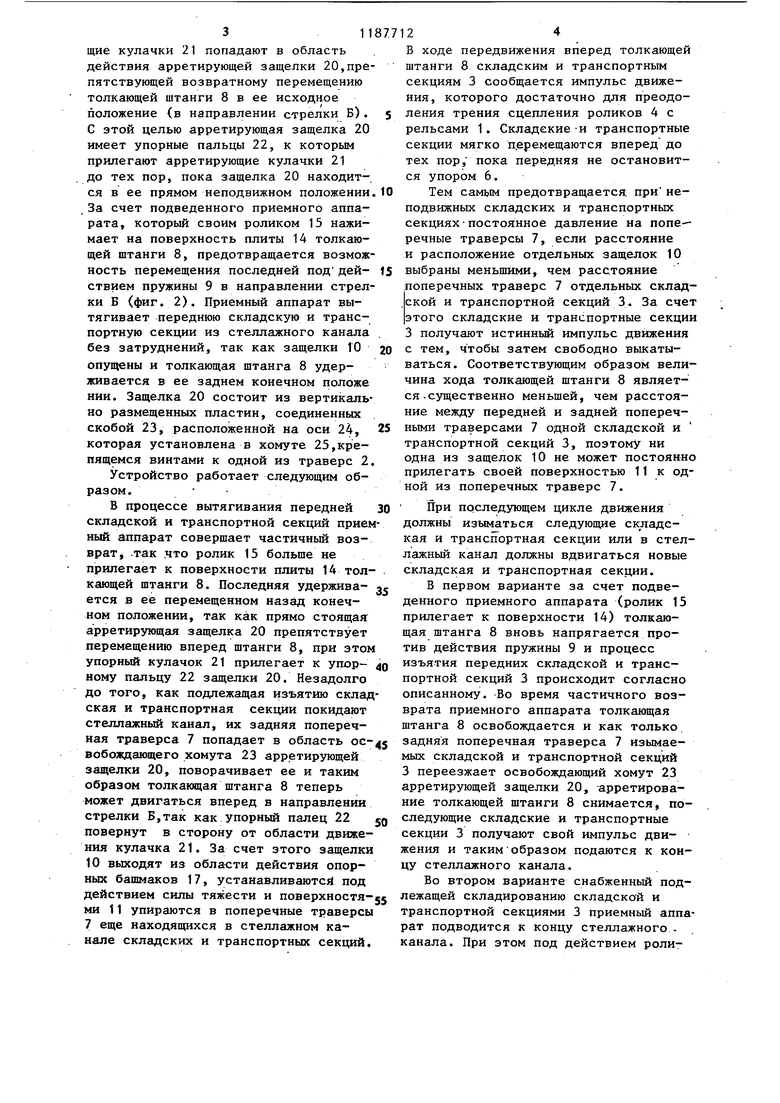
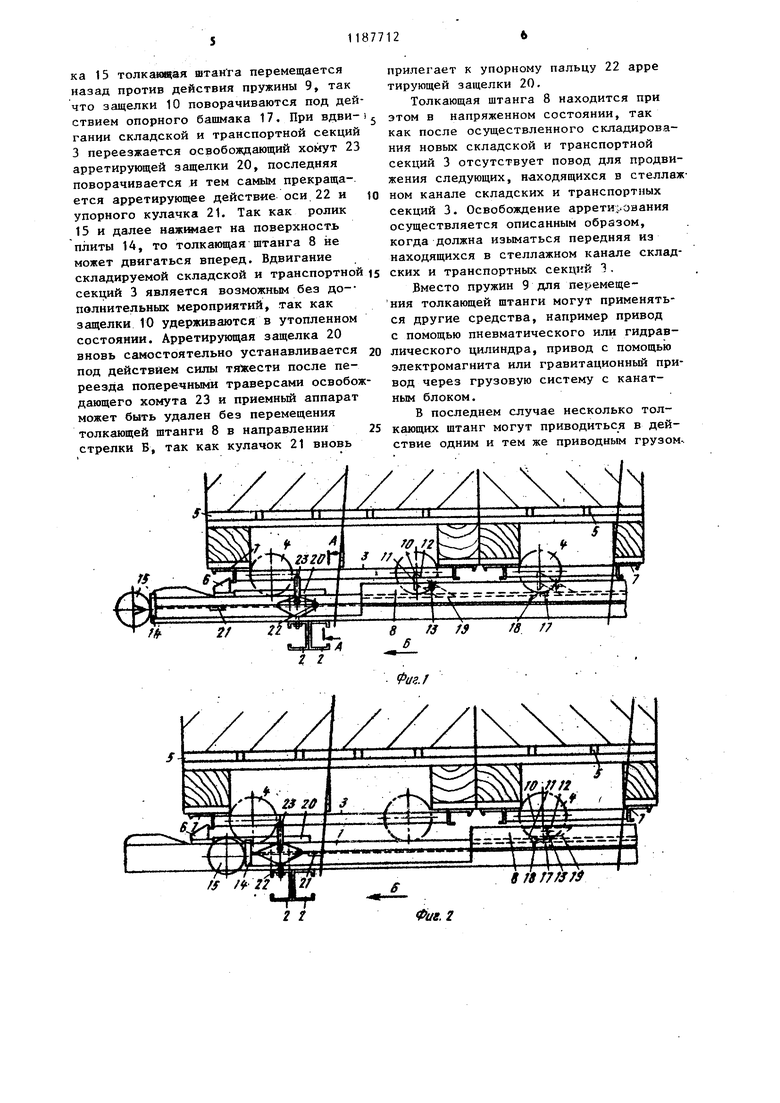
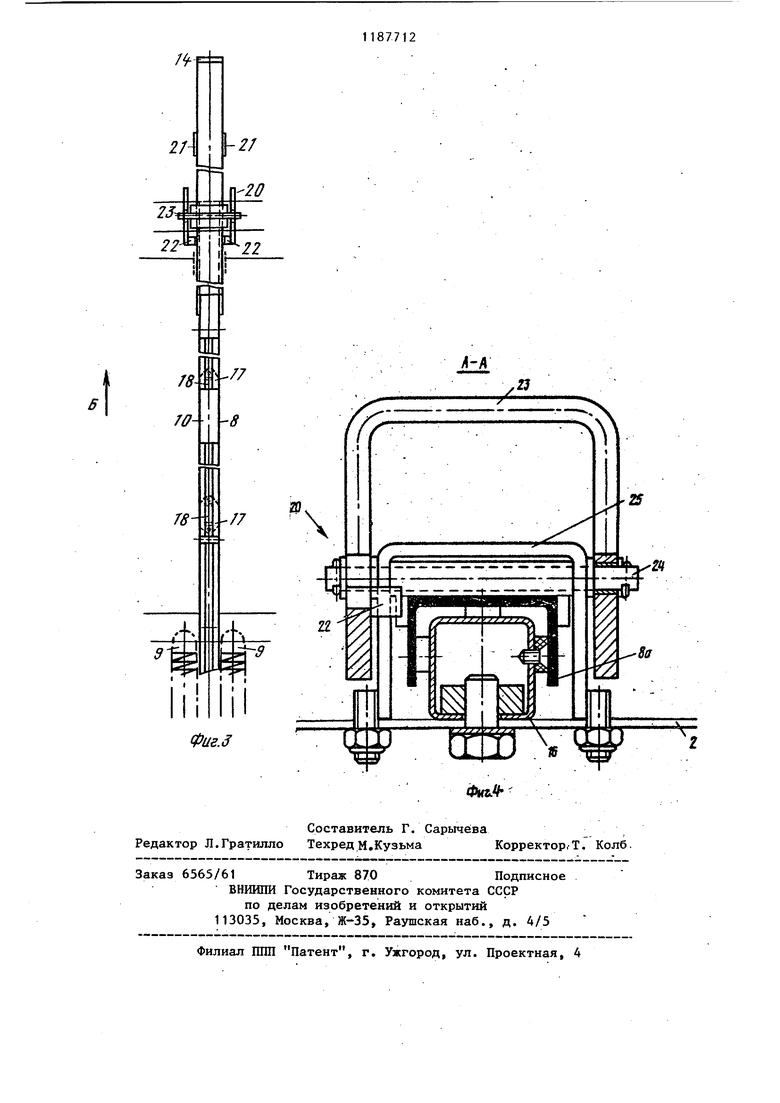
На фиг. 1 показы складской канал в неподвижном положении без подведенного приемного аппарата, продольный разрез; на фиг. 2 - то же, с подведенным приемным аппаратом, разрез; на фиг. 3 - толкающая штанга, вид сверху; на фиг. 4 - разрез А-А на фиг. 1.
Предлагаемая установка (фиг.1 и 2) имеет складской стеллаж с з акрёпленными на раме рельсами 1, которые опираются на поперечные траверсы 2. По рельсам 1 передвигаются складские и транспортные тележки-секции 3 коле сами 4 и несут на себе нагруженные поддоны 5. Рельсы 1 имеют концевые упоры 6, на которые наталкиваются передние поперечные траверсы 7 внешних складской и транспортной секций 3, так как рельсы 1 несколько наклонены в направлении стрелки Б.
Наклон рельсов 4 выбран таким, чтобы складские и транспортные секции 3 не катились самостоятельно, а находились в движении или умеренно замедлялись, так как создаваемое наклоном рельсов ускорение является таким же, как и обусловленное сопротивлением качению колес замедление.
В середине между парой рельсов расположена перемещаемая толкающая штанга 8,находящаяся под действием пружин 9 (фиг. 3), которые стремятся переместить толкающую штангу в направлении стрелки Б . Толкающая штанга 8 оснащена установленными поворачиваемыми захватныьш защелками 10, которые в их отклоненном неподвижном положении выходят за поверхность толкающей штанги 8 и тем самым лежат на пути перемещения поперечных траверс 7 складских и транспортных секций 3. Эти защелки 10 имеют расположенную с передней стороны поверхность 11 толкания, которая проходит вертикально и во время сообщения импульса перемещения вперед
122
предназначена для прилегания к по-, перечным траверсам 7. Задняя поверхность 12 защелок 10 является наклоненной, так что движущиеся через защелку складская и транспортная секции 3 могут переехать последнюю, так как эта сила в состоянии утопить ее поворотную опору вокруг оси 13.
На переднем конце толкающей штанги 8 расположена толкающая плита 14, к которой прилегает соответственно
расположенный толкающий элемент в виде ролика 15 приемного транспор.тного средства (не показано), когда последнее подводится к концу стеллажного канала со стороны изъятия.
Толкающая штанга 8 направляется перемещаемой по направляющей штанге 16, которая оснащена опорными башмаками-клиньями 17, имеющими наклонную верхнюю поверхность 18 набегания. Для каждой захватной защелки 10 при этом предназначен один опорный башмак 17. Если толкающая штанга 8 под действием ролика 15 приемного аппарата передвигается обратно, то нижние поверхности 19 защелок 10 попадают в область действия поверхностей 18 набегания предназначенных для них опор ных башмаков 17, и защелки 10 поворачиваются вокруг их оси 13 до тех пор, пока они не будут утоптаны вовнутрь толкающей штанги 8. За счет этого толкающие поверхности 11 защелок 10 больше не находятся в области перемещения поперечных траверс 7 складских и транспортных секций 3 и последние могут двигаться против направления стрелки Б в пределах стеллажного канала.
Далее предусмотрены средства стопорения (арретирования) толкающей штанги в ее вдвинутом назад положении (фиг. 1), которые включают расположенную в области переднего конца стеллажного канала поворачиваемую арретирующую защелку 20, а также расположенный сбоку у переднего конца толкающей штанги 8 арретирующий кулачок 21.
На фиг. 4 более подробно показана конструкция арретирующей защёлки 20 в виде коромысла. Корпус защелки несет на себе расположенные сбоку упорные пальцы 21, которые действуют совместно с арретирующими кулачками 21 толкающей штанги. При возвратном толчке толкающей штанги 8 арретирую311
щие кулачки 21 попадают в область действия арретирующей защелки 20,препятствующей возвратному перемещению толкающей штанги 8 в ее исходное положение (в направлении стрелки Б). С этой целью арретирующая защелка 20 имеет упорные пальцы 22, к которым прилегают арретирующие кулачки 21 до тех пор, пока защелка 20 находит-. ся в ее прямом неподвижном положении. За счет подведенного приемного аппарата, который своим роликом 15 нажимает на поверхность плиты 14 толкающей штанги 8, предотвращается возможность перемещения последней поддействием пружины 9 в направлении стрелки Б (фиг. 2). Приемный аппарат вытягивает переднюю складскую и транспортную секции из стеллажного канала без затруднений, так как защелки 10 опущены и толкающая штанга 8 удерживается в ее заднем конечном положа НИИ. Защелка 20 состоит из вертикально размещенных пластин, соединенных скобой 23, расположенной на оси 24, которая установлена в хомуте 25,крепящемся винтами к одной из траверс 2.
Устройство работает следующим образом.
В процессе вытягивания передней складской и транспортной секций приемный аппарат совершает частичный возврат, .так .что ролик 15 больше не прилегает к поверхности плиты 14 толкающей штанги 8. Последняя удерживается в её перемещенном назад конечном положении, так как прямо стоящая арретирующая защелка 20 препятствует перемещению вперед штанги 8, при этом упорный кулачок 21 прилегает к упор- ному пальцу 22 защелки 20. Незадолго до того, как подлежащая изъятию складская и транспортная секции покидают стеллажный канал, их задняя поперечная траверса 7 попадает в область 00вобождающего хомута 23 арретирующей защелки 20, поворачивает ее и таким образом толкающая штанга 8 теперь может двигаться вперед в направлении стрелки Б,так как упорный палец 22 повернут в сторону от области движения кулачка 21. За счет этого защелки 10 выходят из области действия опорных башмаков 17, устанавливаются под действием силы тяжести и поверхностя- ми 11 упираются в поперечные траверсы 7 еще находящихся в стеллажном канале складских и транспортных секций.
124
В ходе передвижения вперед толкающей штанги 8 складским и транспортным секциям 3 сообщается импульс движения, которого достаточно для преодоления трения сцепления роликов 4 с рельсами 1. Складские -и транспортные секции мягко перемещаются вперед до тех пор, пока передняя не остановится упором 6.
Тем самьм предотвращается принеподвижных складских и транспортных секциях-постоянное давление на попе-речные траверсы 7, если расстояние и расположение отдельных защелок 10 выбраны меньшими, чем расстояние поперечных траверс 7 отдельных склад.ской и транспортной секций 3. За сче |этого складские и транспортные секци 3 получают истинный импульс движения с тем, чтобы затем свободно выкатываться. Соответствующим образом величина хода толкающей штанги 8 является -существенно меньшей, чем расстояние между передней и задней поперечными траверсами 7 одной складской и транспортной секций 3, поэтому ни одна из защелок 10 не может постоянн прилегать своей поверхностью 11 к одной из поперечных траверс 7.
При последующем цикле движения должны изыматься следующие складская и транспортная секции или в стеллажный канал должны вдвигаться новые складская и транспортная секции.
В первом варианте за счет подведенного приемного аппарата (ролик 15 прилегает к поверхности 14) толкающая штанга 8 вновь напрягается против действия пружины 9 и процесс изъятия передних складской и транспортной секций 3 происходит согласно описанному. Во время частичного возврата приемного аппарата толкающая штанга 8 освобождается и как только задняя поперечная траверса 7 изымаемых складской и транспортной секц;ий 3 переезжает освобождающий хомут 23 арретирующей защелки 20, арретирование толкающей штанги 8 снимается, последующие складские и транспортные секции 3 получают свой импульс движения и таким образом подаются к концу стеллажного канала.
Во втором варианте снабженный подлежащей складированию складской и транспортной секциями 3 приемный аппарат подводится к концу стеллажного канала. При этом под действием ролика 15 толкакедая штанга перемещается назад против действия пружины 9, так что защелки 10 поворачиваются под действием опорного башмака 17, При вдви-) гании складской и транспортной секций 3 переезжается освобождающий хомут 23 арретирующей защелки 20, последняя поворачивается и тем самым прекращается арретирующее действие оси 22 и to упорного кулачка 21, Так как ролик 15 и далее на поверхность плиты 14, то толкающая щтанга 8 не может двигаться вперед. Вдвигание складируемой складской и транспортной is секций 3 является возможным без до-полнительных мероприятий, так как защелки 10 удерживаются в утопленном состоянии. Арретирующая защелка 20 вновь самостоятельно устанавливается 20 под действием силы тяжести после переезда поперечными траверсами освобождающего хомута 23 и приемный аппарат может быть удален без перемещения толкающей щтанги 8 в направлении 25 стрелки Б, так как кулачок 21 вновь
прилегает к упорному пальцу 22 арре тирующей защелки 20.
Толкающая штанга 8 находится при этом в напряженном состоянии, так как после осуществленного складирования новых складской и транспортной секций 3 отсутствует повод для продвижения следующих, находящихся в стеллажном канале складских и транспортных секций 3, Освобождение аррети ования осуществляется описанным образом, когда должна изыматься передняя из находящихся в стеллажном канале складских и транспортных секций 3.
Вместо пружин 9 для перемещения толкающей штанги могут применяться другие средства, например привод с помощью пневматического или гидравлического цилиндра, привод с помощью электромагнита или гравитационный привод через грузовую систему с канатным блоком,
В последнем случае несколько толкающих щтанг могут приводиться в действие одним и тем же приводным грузом -2/ 20
I
22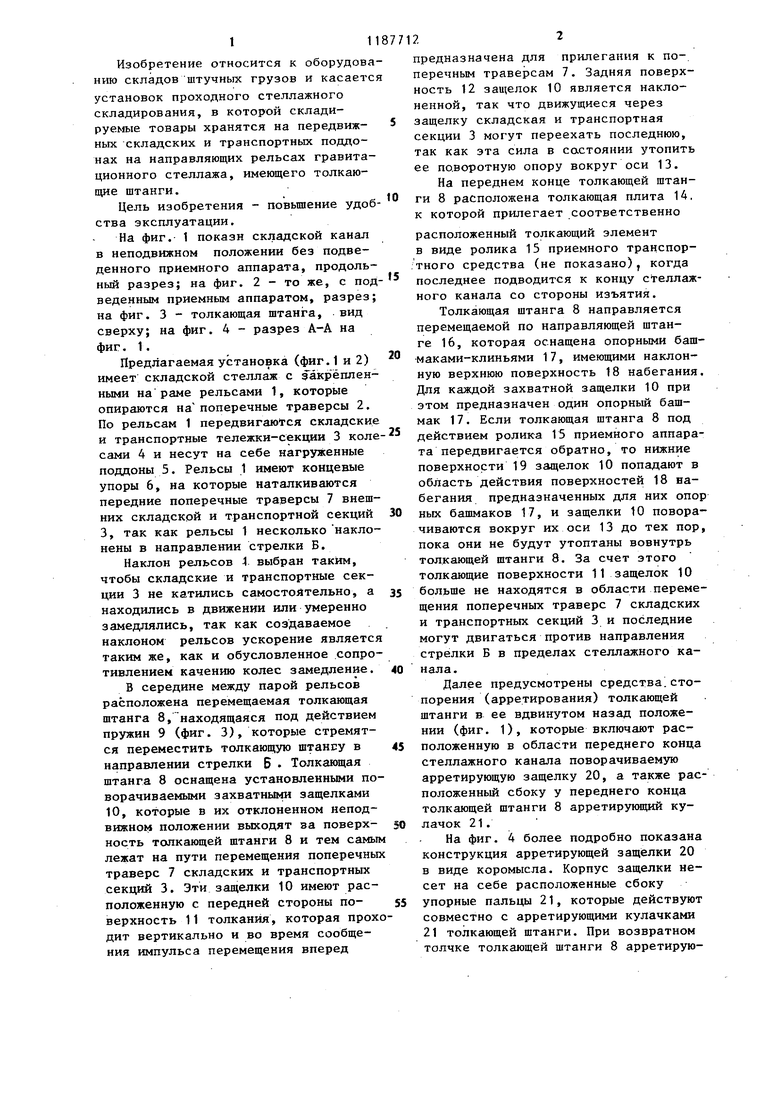
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦЕПНОЙ ПОДВАГОННЫЙ ТОЛКАТЕЛЬ | 1973 |
|
SU408841A1 |
| Поглощающий аппарат автоматической сцепки | 1973 |
|
SU583728A3 |
| Саморазгружающийся контейнер | 1988 |
|
SU1519975A1 |
| Устройство для весовой сортировки изделий | 1987 |
|
SU1498563A1 |
| АРРЕТИРУЮЩЕЕ УСТРОЙСТВО | 2013 |
|
RU2540445C1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Устройство для многоцветной печати штучных изделий | 1985 |
|
SU1357250A1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО С ПОДНИМАЮЩИМСЯ/ОПУСКАЮЩИМСЯ СТОЛОМ, НЕСУЩИМ ТРАНСПОРТИРУЕМЫЕ ОБЪЕКТЫ | 2005 |
|
RU2337843C1 |
| Типографская скоропечатная машина с качающимся печатным барабаном | 1939 |
|
SU57430A1 |
| УСТРОЙСТВО ДЛЯ НЕПОДВИЖНОЙ ФИКСАЦИИ МОТОЦИКЛА В ВЕРТИКАЛЬНОМ ПОЛОЖЕНИИ | 2010 |
|
RU2533862C2 |
УСТАНОВКА С ГРАВИТАЦИОННЫМ ПРОХОДНЫМ СТЕЛЛАЖОМ, содержащая раму с направляющими рельсами, размещенные на последних роликовые транспортные тележки для грузов, подвижные подпружиненные в продольном направлении толкающиештанги для -импульсного воздействия на транспортные тележки, расположенные по одной посередине между направляющими рельсами одного прохода параллельно им и выполненные с захватными защелками, представляющими собой двуплечие рычаги, установленные с возможностью взаимодействия одними плечами с роликовыми транспортными тележками, отличающаяся тем, что, с целью повышения удобства эксплуатации, она снабжена органами.стопорения толкающих штанг в задвинутом положении в направлении против действия пружин, представляющими собой каждый коромысло, образованное двумя вертикально и параллельно одна другой расположенными пластинами, соединенными между собой расположенной на пути перемещения тележек с возможностью взаимодействия с ними скобой и смонтированными на прикрепленной к раме перпендикулярно штанге и расположенной вьш1е центра тяжести коромысла в одной с ним вертикальной плоскости симметрии горизонтальной оси, причем на концах внутренних поверхностей пластин коромысла, расположенных с задней в направлении перемещения тележек стороны рамы, закреплены упорные пальцы, размещенные по высоте между горизонтальной осью и центром тяжести коромысла, на каждой толкающей штанге закреплены кулачки, обращенные к задней.и передней частям рамы соответственно наклонной и вертикальной поверхностями для взаимодействия с упорными пальцами, а вдоль каждой штанги на раме установлены клинья для взаимодействия с другими плечами двуплечих рычагов захватных защелок при перемещении толкающей штанги против действия пружины для поворота упомянутых рычагов ниже полотна направляющих рельсов для тележек.
| ПЛАЗМАТРОН с КОМБИНИРОВАННЫМ ЭЛЕКТРОДОМ | 0 |
|
SU338175A1 |
| Горный компас | 0 |
|
SU81A1 |
