Область техники
Заявленная группа изобретений относится к авиационной технике, а именно к малогабаритным летательным аппаратам (ЛА) вертикального взлета/посадки и горизонтального прямолинейного полета, предназначенным, в частности, для перевозки пассажиров, а также перевозки и доставки различных грузов и товаров.
Уровень техники
Из уровня техники известен ЛА, включающий несущую силовую платформу, на концевых участках которой установлены двигатели с несущими пропеллерами (см. патент РФ №2657650 на изобретение).
Недостатками известного ЛА являются:
- низкая управляемость, маневренность ЛА;
- низкая безопасность из-за наличия травмоопасных винтов большого диаметра и отсутствия их защиты от соударений с поверхностью земли и иными препятствиями;
- отказ хотя бы одного пропеллера или двигателя из четырех ведет к аварии, что приводит к низкой безопасности полета;
- большие массогабаритные характеристики ЛА за счет наличия ВМГ большого размера;
- низкая скорость и комфорт полета;
- невозможность обеспечения должного уровня тяги при использовании открытых лопастей пропеллеров;
- высокая шумность ЛА из-за отсутствия экранирования винтов;
- ограниченные функциональные возможности: невозможность перевозки и доставки грузов, не предназначен для перевозки пассажиров.
Из уровня техники известны ЛА, включающие несущую раму с попарно установленными электромоторами и пропеллерами в углах, при этом электромоторы с пропеллерами установлены в защитных корпусах (см патенты РФ №№127039, 163412 на полезные модели).
Недостатками известных ЛА являются:
- большие массогабаритные характеристики ЛА за счет наличия ВМГ и защитных экранов больших размеров;
- низкая управляемость, маневренность и скорость полета;
- низкий комфорт полета ЛА для пилота.
- ограниченные функциональные возможности: невозможность перевозки и доставки грузов, не предназначен для перевозки пассажиров;
- маленькая дальность и продолжительность полета.
Из уровня техники известны ЛА, включающие от двух до нескольких десятков электро-движителей в виде электромоторов с пропеллерами (винтами) (см., например, заявки DE 102013108206 и US 2015012154 на изобретения).
Недостатками известных ЛА являются:
- большие массогабаритные характеристики ЛА за счет наличия ВМГ и защитных больших размеров;
- низкая безопасность полета за счет наличия открытых вращающихся лопастей винтов большого диаметра;
- невозможность обеспечения должного уровня тяги при использовании открытых несущих винтов;
- высокая шумность ЛА из-за отсутствия экранирования концов лопастей винтов. Раскрытие сущности изобретения
Целью заявленной группы изобретения является создание компактного, мобильного, безопасного при взлете/посадки и полете ЛА для перевозки людей и различных грузов (товаров), обладающего высокой маневренностью, управляемостью и скоростью полета, а также низким уровнем шума.
Техническими результатами заявленной группы изобретений являются:
- увеличение тяги и скорости полета;
- улучшение управляемости и маневренности полета;
- увеличение безопасности взлета, посадки и приземления ЛА;
- уменьшение массогабаритных характеристик ЛА;
- увеличение отзывчивости винтомоторных групп (ВМГ);
- увеличение отказоустойчивости ВМГ;
- увеличение устойчивости, стабильности и комфорта полета ЛА;
- возможность придания любой геометрической формы ВМГ, в отличие от круга, что благотворно сказывается на устойчивости, жесткости, эффективности ЛА, появляется возможность изменения развесовки;
- повышение ремонтопригодности (возможность оперативного выявления и устранения неисправности (поломки) видимых с внешних сторон малогабаритных ВМГ);
- уменьшение уровня шума;
- повышение мобильности и компактности ЛА.
Технические результаты заявленной группы изобретений достигаются тем, что летательный аппарат (ЛА) вертикального взлета/посадки и горизонтального прямолинейного полета включает расположенные на определенном расстоянии друг от друга на трубках малогабаритные независимо работающие электродвигатели с несущими винтами, образующие независимо работающие винтомоторные группы (ВМГ), расположенные на определенном расстоянии друг от друга и продольной оси ЛА, при этом каждый малогабаритный несущий винт соединен с малогабаритным независимо работающим электродвигателем, при этом трубки закреплены на несущей силовой платформе - раме.
В одном из вариантов осуществления, независимо работающие ВМГ установлены спереди и сзади ЛА.
В другом варианте осуществления, независимо работающие ВМГ установлены спереди, сзади и по бокам ЛА.
В вариантах осуществления, трубки с малогабаритными независимо работающими электродвигателями и несущими винтами закреплены на несущей силовой платформе - раме, образуя ВМГ по периметру (площади), например в виде круга, треугольника, квадрата, прямоугольника, многоугольника, трапеции, параллелограмма, ромба или эллипса.
В частном варианте осуществления, независимо работающие ВМГ установлены внутри экранов.
В вариантах осуществления, в качестве экранов используют открытые пространственные трубчатые рамы, например, в виде сферы, цилиндра, куба, эллипсоида или параллелепипеда, замкнутого или разомкнутого типа.
В других вариантах осуществления, в качестве экранов используют корпуса или кольца.
В одном варианте осуществления, независимо работающие ВМГ установлены внутри экранов таким образом, что они видимы со всех внешних сторон и к ним есть доступ.
В другом варианте осуществления, независимо работающие ВМГ установлены внутри экранов таким образом, что они видимы с определенных внешних сторон и к ним есть доступ.
В вариантах осуществления, количество малогабаритных независимо работающих электродвигателей с несущими винтами в каждой передней и задней, и боковой независимо работающей ВМГ может быть любым, но одинаково в каждой передней и задней ВМГ, и в каждой боковой ВМГ, при этом их количество в передней и задней ВМГ может отличаться от количества в боковых ВМГ
В других вариантах осуществления, количество независимо работающих ВМГ может быть любым, но одинаково спереди и сзади ЛА, и по бокам ЛА, при этом количество передних и задних ВМГ может отличаться от количества ВМГ по бокам ЛА.
В частных вариантах осуществления, ЛА выполнен беспилотным, либо содержит кабину для пилота и/или пассажиров, или сиденье пилота.
Краткое описание чертежей
Заявленная группа изобретений поясняется в последующем детальном описании, иллюстрируемом чертежами (см. фигуры 1-10), где показано следующее.
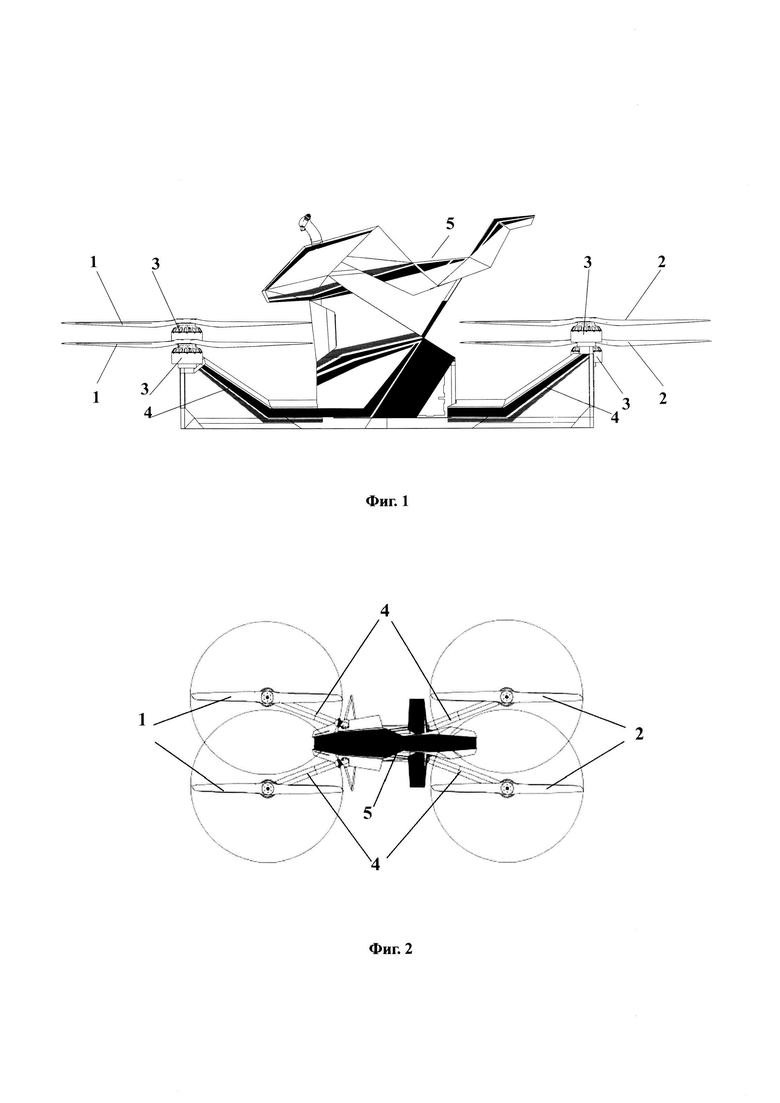
На фигурах 1 и 2 представлен ЛА-аналог (вид сбоку и вид сверху соответственно).
ЛА содержит сиденье (5) пилота, открытые передние (1) и задние (2) несущие винты с моторами (3) больших размеров, установленные на лучах (4) несущей силовой платформы - рамы (два спереди и два сзади ЛА).
На фиг. 3 - частный вариант осуществления заявленного ЛА (вид сверху).
На фиг. 4 - частный вариант ВМГ на раме.
На фиг. 5 - частный вариант ВМГ на раме.
На фиг. 6 - частный вариант выполнения ВМГ внутри экрана эллипсоидной формы, замкнутого типа (вид сбоку).
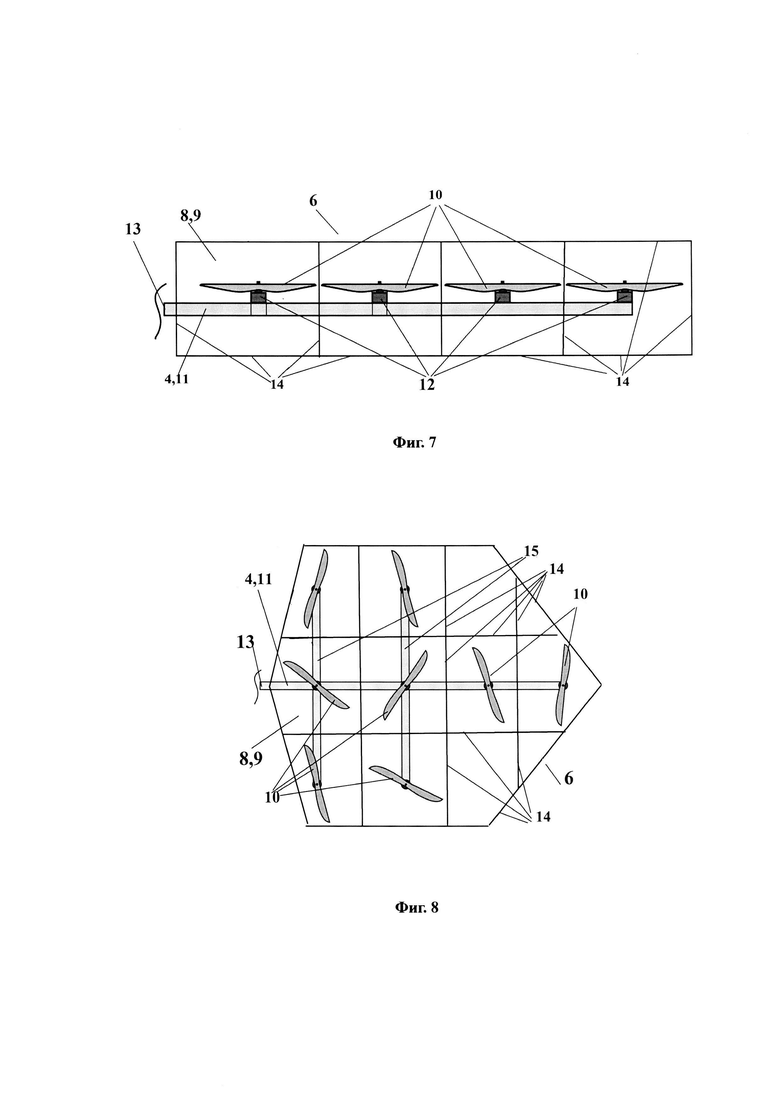
На фиг. 7 - частный вариант выполнения ВМГ внутри экрана прямоугольной формы, замкнутого типа (вид сбоку).
На фиг. 8 - частный вариант выполнения ВМГ внутри экрана в виде шестиугольника, замкнутого типа (вид сверху).
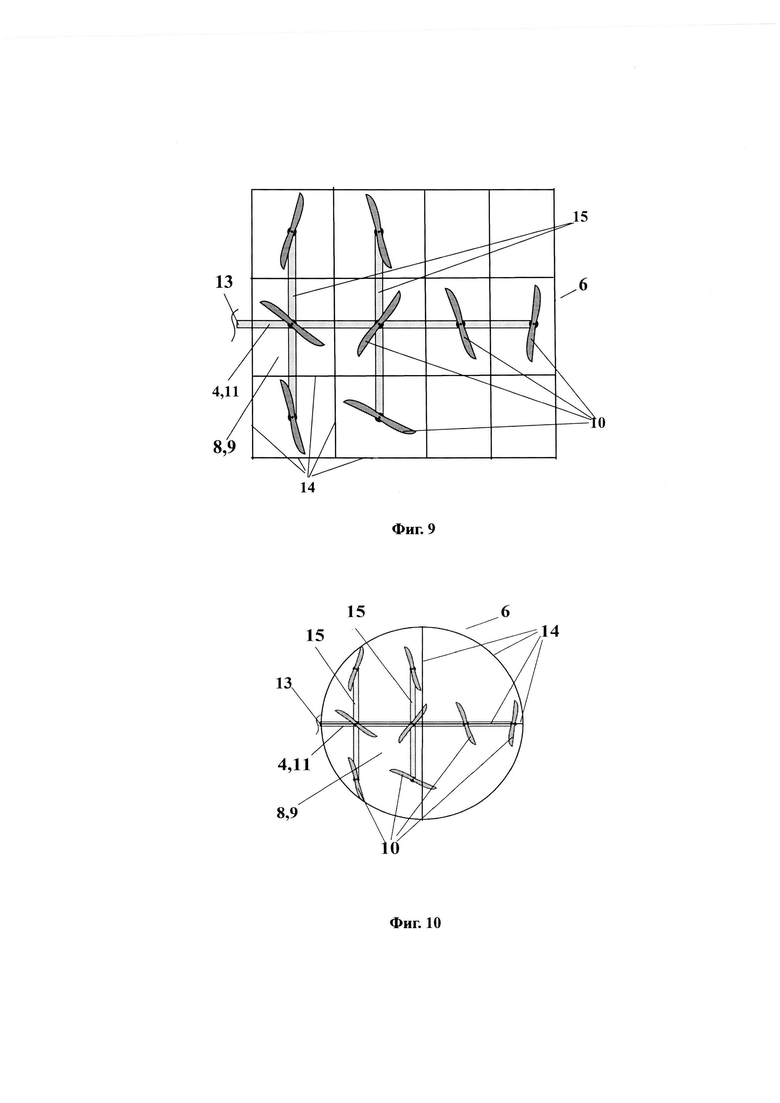
На фиг. 9 - частный вариант выполнения ВМГ внутри экрана в виде четырехугольника, замкнутого типа (вид сверху).
На фиг. 10 - частный вариант выполнения ВМГ внутри экрана в виде круга (сферы), замкнутого типа (вид сверху).
На фигурах 1-10 обозначено следующее:
1 - передние движители - несущие винты;
2 - задние движители - несущие винты;
3 - электродвигатели несущих винтов;
4 - лучи несущей силовой платформы-рамы;
5 - сиденье пилота;
6 - экраны;
7 - средство соединения;
8 - передние ВМГ;
9 - задние ВМГ;
10 - малогабаритные несущие винты;
11 - трубки;
12 - малогабаритные независимо работающие электродвигатели;
13 - открытый конец трубки или луча несущей силовой платформы-рамы;
14 - трубки открытой пространственной трубчатой рамы-экрана;
15 - дополнительные трубки.
Осуществление изобретения
На фиг. 3 представлен один из вариантов осуществления заявленного ЛА в виде летающего мотоцикла (вид сверху).
ЛА содержит две передние (8) и две задние (9) ВМГ. Каждая передняя (8) и задняя (9) ВМГ состоит из нескольких малогабаритных независимо работающих электродвигателей с несущими винтами (10), расположенными на определенном расстоянии друг от друга, при этом каждый несущий винт (10) передней (8) и задней (9) ВМГ имеет свой индивидуальный независимо работающий электродвигатель. Передние (8) и задние (9) ВМГ установлены внутри экранов (6), выполняющих защитную функцию и имеющих по периметру (по площади) форму шестиугольника. Экраны (6) также могут иметь любые другие формы, например форму треугольника, многоугольника, круга, трапеции, параллелограмма, ромба или эллипса. Экраны (6) могут быть выполнены, например, в виде открытых несущих пространственных трубчатых рам, корпусов или колец различных форм и размеров. Экраны (6) передних (8) и задних (9) ВМГ выполнены в виде открытых несущих пространственных трубчатых рам (см. фиг. 3). ВМГ (8, 9) установлены внутри экранов (6) таким образом, что они видимы со всех внешних сторон и к ним есть доступ. Малогабаритные независимо работающие электродвигатели несущих винтов (10) закрепляются своим неподвижным основанием на трубках (11), закрепленных с помощью средства соединения (7), например, узлового коннектора, на концевых участках лучей (4) общей крестообразной несущей силовой платформы-рамы, образуя лепестковую форму. ВМГ (8, 9) собраны и соединены между собой внутри экранов (6), образуя форму шестиугольника (см. фиг. 3). ВМГ (8, 9) могут иметь различные формы, например, форму круга, треугольника, прямоугольника, трапеции, параллелограмма, ромба или эллипса. Общая несущая силовая платформа - рама может иметь различную форму, например, X (см. фиг. 3), Н или квадрат - образную форму и состоит из лучей - балок (4) рамной конструкции. Малогабаритные ВМГ (8, 9) могут устанавливаться не только спереди и сзади ЛА, но и по бокам ЛА. Открытая несущая пространственная рама (6) представляет собой систему - пространственную ферму из соединенных между собой трубок (14) из материалов/металлов высокой прочности, например, из алюминиевого сплава и выполняет функцию экрана (6), полностью охватывающего малогабаритные электродвигатели и несущие винты (10) с их внешних сторон (поверхностей, частей). Открытая несущая пространственная трубчатая рама - экран (6) может иметь различные размеры и форму, например, форму эллипсоида или параллелепипеда, как замкнутого (см. фиг. 3), так и разомкнутого типа (не показано). Количество трубок (11, 14) и малогабаритных (малоразмерных) независимо работающих электродвигателей с несущими винтами (10) в каждой ВМГ (8, 9), внутри экранов (6), может быть любым и одинаково спереди и сзади ЛА, а также слева и справа ЛА. Трубки (11, 14) могут иметь различную форму и размер, трубки (11, 14) могут иметь различное соединение между собой и с лучами (4) несущей силовой платформы-рамы, соединенные между собой трубки (11, 14) могут образовывать различные формы.
Каждый передний, задний и боковой малогабаритный несущий винт (10) установлен таким образом, что имеет свою вертикальную ось вращения. Каждый боковой малогабаритный несущий винт (10) может быть установлен таким образом, что имеет свою горизонтальную ось вращения.
На фиг. 3 представлен ЛА в виде летающего мотоцикла с сиденьем (5) пилота. Также ЛА может быть беспилотным, иметь кабину для пилота и/или пассажиров.
На фиг. 4 представлен частный вариант выполнения ВМГ.
ВМГ состоит из 4-х малогабаритных независимо работающих электродвигателей (12) и несущих винтов (10). Каждый малогабаритный несущий винт (10) соединен с индивидуальным независимо работающим электродвигателем (12).
В одном варианте осуществления, малогабаритные независимо работающие электродвигатели (12) несущих винтов (10) могут быть закреплены своим неподвижным основанием на луче (4) общей несущей силовой платформы-рамы, на определенном расстоянии друг от друга.
В другом варианте осуществления, малогабаритные независимо работающие электродвигатели (12) несущих винтов (10) могут быть закреплены своим неподвижным основанием на трубке (11), на определенном расстоянии друг от друга. При этом, открытый конец (13) трубки (11) закреплен с помощью средства соединения (7) на концевом участке луча (4) общей несущей силовой платформы (рамы). Количество трубок (11) с ВМГ может быть любым, в разном сочетании, с различной формой и разных размеров.
На фиг. 5 представлен частный вариант выполнения ВМГ (8, 9), состоящей из 8 малогабаритных независимо работающих электродвигателей с несущими винтами (10).
В одном из вариантов осуществления, удлиненная трубка (11) с 4-мя малогабаритными независимо работающими электродвигателями с несущими винтами (10) может быть закреплена своим одним открытым концом (13) с помощью соединительного средства (7) на концевом участке луча (4) общей несущей силовой платформы (рамы), при этом дополнительно на удлиненной трубке (11) и поперек (перпендикулярно) ей могут быть закреплены еще две трубки (15) меньшей длины, на концевых участках которых также закреплено по одному малогабаритному независимо работающему электродвигателю с несущим винтом (10).
В другом варианте осуществления, 4 малогабаритных электродвигателя несущих винтов (10) могут быть закреплены на луче - балке (4) общей несущей силовой платформы-рамы, при этом на луче (4) и поперек (перпендикулярно) лучу (4) могут быть закреплены дополнительно еще две параллельные друг другу трубки (15) с 2-мя малогабаритными независимо работающими электродвигателями несущих винтов (10), на их концевых участках.
Возможны также и другие варианты осуществления ЛА с другими конфигурациями ВМГ, с различным соединением трубок (11, 15) к лучам (4) общей несущей силовой платформы (рамы) и между собой. Количество, форма, размеры, соединение лучей (4) и трубок (11, 15) с ВМГ могут быть различными, количество малогабаритных электродвигателей с несущими винтами (10) также может быть различно и одинаково в каждой ВМГ (8, 9).
На фиг. 6 представлен частный вариант выполнения ВМГ (8, 9) по фиг. 4 внутри экрана эллипсоидной формы, замкнутого типа (вид сбоку).
ВМГ состоит из 4-х малогабаритных независимо работающих электродвигателей (12) и несущих винтов (10), при этом каждый малогабаритный несущий винт (10) имеет свой индивидуальный малогабаритный независимо работающий электродвигатель (12).
В одном варианте осуществления, малогабаритные независимо работающие электродвигатели (12) несущих винтов (10) могут быть закреплены своим неподвижным основанием на луче - балке (4) общей несущей силовой платформы-рамы, на определенном расстоянии друг от друга.
В другом варианте осуществления, малогабаритные независимо работающие электродвигатели (12) несущих винтов (10) могут быть закреплены своим неподвижным основанием на трубке (11) рамы, на определенном расстоянии друг от друга. При этом, трубка (11) закреплена своим одним открытым концом (13) с помощью средства соединения (7) на концевом участке луча (4) общей несущей силовой платформы (рамы). Количество трубок (11) с ВМГ может быть любым, в разном сочетании, с различной формой, соединенные между собой трубки (11) могут образовывать любую форму, например, форму лепестка, как показано на фиг. 3. В качестве средства соединения (7) может использоваться любое средство, соединяющее между собой трубки (10), например, узловой коннектор. Трубки (11) могут соединяться между собой и с лучами (4) общей несущей силовой платформы-рамы, например, сваркой, клеем, клепкой и другим соединением.
Малогабаритные ВМГ (8, 9) устанавливаются внутри экрана (6), выполненного в виде открытой несущей пространственной рамы эллипсоидной формы, замкнутого типа. Рама (6) представляет собой систему - пространственную ферму из соединенных между собой трубок (14) из материалов/металлов высокой прочности, например, из алюминиевого сплава и выполняет функцию экрана (6), полностью охватывающего малогабаритные независимо работающие электродвигатели (12) и несущие винты (10) с внешних сторон (поверхностей, частей). ВМГ устанавливается внутри экрана (6) таким образом, что малогабаритные независимо работающие электродвигатели (12) с несущими винтами (10) видимы со всех внешних сторон и к ним есть доступ.
Малогабаритные ВМГ (8, 9) могут размещаться внутри различных по форме и виду экранов (6), например, в виде открытых несущих пространственных трубчатых рам прямоугольной (четырехугольной) формы, выполненных из соединенных между собой трубок (14) (как показано на фиг. 7, вид сбоку), а также внутри экранов (6) в виде различных корпусов или колец.
ВМГ (8, 9), состоящие из малогабаритных (малоразмерных) независимо работающих электродвигателей с несущими винтами, могут быть расположены с разных сторон ЛА, например, только спереди и сзади или спереди, сзади и по бокам ЛА.
ВМГ (8, 9) могут устанавливаться внутри экранов (6) таким образом, что они видимы со всех внешних сторон или только с определенных внешних сторон, например, только сверху и/или снизу. Это позволяет оперативно выявлять различные неисправности (поломки) ВМГ (8, 9), проводить необходимую диагностику и замену, значительно сокращая время на обслуживание и ремонт ЛА.
На фиг. 8 представлен частный вариант выполнения ВМГ (8, 9) по фиг. 5 внутри экрана в виде шестиугольника, замкнутого типа (вид сверху).
Малогабаритная ВМГ (8, 9) состоит из 8-ми малогабаритных независимо работающих электродвигателей с несущими винтами (10). Каждый несущий винт (10) соединен со своим индивидуальным независимо работающим электродвигателем.
В одном из вариантов осуществления, 4 независимо работающих малогабаритных (малоразмерных) электродвигателя с несущими винтами (10) могут быть закреплены на определенном расстоянии друг от друга на удлиненной трубке (11), закрепляемой своим открытым концом (13) с помощью соединительного средства (7), например, узлового коннектора, на концевых участках лучей (4) общей несущей силовой платформы-рамы. Дополнительно, на удлиненной трубке (11) и поперек (перпендикулярно) ей закреплены две трубки (15) меньшей длины, на концевых участках которых закреплено по одному малогабаритному независимо работающему электродвигателю с малогабаритным несущим винтом (10).
В другом варианте осуществления, 4 малогабаритных независимо работающих электродвигателя несущих винтов (10) закреплены на определенном расстоянии друг от друга на луче (4) общей несущей силовой платформы-рамы, при этом дополнительно поперек (перпендикулярно) лучу (4) общей несущей силовой платформы-рамы и на луче (4) закреплены, с помощью соединительного средства, две трубки (15), параллельные друг другу. На концевых участках двух трубок (15) размещено по одному малогабаритному независимо работающему электродвигателю с несущим винтом (10).
Малогабаритные ВМГ (8, 9) устанавливаются внутри экрана (6) в виде открытой несущей пространственной трубчатой рамы - системы - пространственной фермы из соединенных между собой трубок (14) из материалов/металлов высокой прочности, например, из алюминиевого сплава. Экран (6) полностью охватывает ВМГ из малогабаритных электродвигателей и несущих винтов (10) с их внешних сторон (поверхностей, частей) и имеет форму шестиугольника, замкнутого типа.
ВМГ (8, 9) устанавливаются внутри экрана (6) таким образом, что малогабаритные электродвигатели с несущими винтами (10) видимы со всех внешних сторон и к ним есть доступ.
ВМГ (8, 9) также могут размещаться внутри различных по форме и виду экранов, например, в виде открытых несущих пространственных трубчатых рам прямоугольной (четырехугольной) формы (как показано на фиг. 9).
Экранированные малогабаритные ВМГ (8, 9) могут быть расположены с разных сторон ЛА, например, только спереди и сзади или спереди, сзади и по бокам ЛА.
Количество, закрепляемых на луче (4) платформы (рамы) трубок (11, 15) может быть любым. Трубки (11, 15) могут иметь различную форму, размер и длину. Количество независимо работающих малогабаритных электродвигателей с несущими винтами (10) на трубках (11, 15) и лучах (4) может быть любым.
Соединенные между собой трубки (11, 15) с лучами (4) общей несущей силовой платформы (рамы) с малогабаритными независимо работающими электродвигателями несущих винтов (10) могут образовывать по периметру (площади) различную форму, например, форму многоугольника, трапеции, прямоугольника, треугольника, круга (как показано на фиг. 10), эллипсоида и т.д.
Трубки (11, 15) могут соединяться с лучами (4) общей несущей силовой платформы и между собой, например, сваркой, клеем, клепкой и другим типом соединения.
Экран (6) может иметь различную форму и размеры, например, прямоугольную (квадратную) форму (как показано на фиг. 9), сферическую форму или форму круга (как показано на фиг. 10), а также другие формы, как замкнутого, так и разомкнутого типа.
В качестве экранов могут использоваться также различные корпуса или кольца.
Возможны также и другие варианты осуществления ЛА с другими конфигурациями малогабаритных ВМГ (8, 9), с различным соединением трубок (11, 15) к лучам (4) общей несущей силовой платформы (рамы) и между собой. Количество, форма, размеры, соединение лучей (4) и трубок (11, 15) с ВМГ (8, 9) могут быть различными, количество малогабаритных электродвигателей (12) с несущими винтами (10) также может быть различно и одинаково в каждой передней и задней ВМГ (8, 9), а также в боковых ВМГ.
Увеличение безопасности вертикального взлета/посадки и полета ЛА и обеспечение защиты винтов (10) от соударений с поверхностью земли и иными препятствиями достигаются за счет отсутствия открытых вращающихся лопастей несущих винтов (10) больших размеров, несущие винты (10) устанавливаются и закрепляются внутри экранов (6), например, внутри открытых несущих пространственных трубчатых рам или корпусов или колец, выполняющих защитную функцию, ограничивая доступ к винтам (10).
Использование экранирования концов лопастей несущих винтов (10) позволяет также понизить уровень шума ВМГ (8, 9).
Повышение отказоустойчивости с сохранением положения ЛА в полете и, следовательно, безопасности полета ЛА, достигается благодаря использованию независимо работающих ВМГ (8, 9), состоящих из массива малогабаритных (малоразмерных) независимо работающих электродвигателей с несущими винтами более малого размера, с малым диаметром винтов (их большего количества), по сравнению с ВМГ, состоящей из одного \электродвигателя с винтом больших размеров на каждом луче, а также благодаря экранированию ВМГ (8, 9).
Использование независимо работающих электродвигателей (12) для каждого отдельного несущего винта (10) каждой ВМГ (8, 9) и использование независимо работающих друг от друга ВМГ (8, 9) позволяет значительно увеличить отказоустойчивость ВМГ (8, 9), что приводит к увеличению безопасности полета ЛА.
ВМГ (8, 9), состоящие из малогабаритных (малоразмерных) электродвигателей (12) и несущих винтов (10), могут устанавливаться внутри экранов (6) таким образом, что они видимы со всех внешних сторон к ним есть доступ или таким образом, что они видимы только с определенных внешних сторон, например, только сверху и снизу. Это позволяет оперативно выявлять и устранять различные неисправности (поломки) электродвигателей (12) и несущих винтов (10), производить их ремонт и замену, повышая тем самым ремонтопригодность ЛА.
Увеличение компактности и мобильности Л А достигается за счет использования (установки) на том же штатном месте (занимаемой площади) вместо электродвигателей с несущими винтами больших размеров (диаметров) - более мелких групп малоразмерных электродвигателей с несущими винтами, т.е. вместо установки одного отдельного несущего винта (1, 2) большого диаметра можно установить несколько малоразмерных несущих винтов (10) меньшего диаметра, вместо объемного мотора (3) можно установить малоразмерные электродвигатели (12), что приводит также к увеличению устойчивости ЛА, повышению маневренности, управляемости и скорости полета ЛА, значительному увеличению отзывчивости ВМГ (8, 9) с 1,5 сек. до 0,1 сек., повышению отказоустойчивости, безопасности, стабильности и комфорта полета ЛА.
В результате уменьшения размеров ВМГ уменьшается вес (за счет чего появляется возможность увеличить батарею), увеличивается отклик (отзывчивость) ВМГ с 1,5 с до 0,1 с, ликвидируются травмоопасные винты (2, 3) большого диаметра.
Распределенная тяга ВМГ (8, 9) по площади, соединенных между собой, трубок (11, 14, 15) увеличивает устойчивость ЛА, появляется возможность придания любой геометрической формы ВМГ (8, 9), в отличие только от круга, что благотворно сказывается на устойчивости, жесткости, эффективности и внешней привлекательности всего ЛА. Появляется также возможность изменения развесовки, ЛА ВМГ (8, 9) с малоразмерными электродвигателями с несущими винтами имеет более низкую себестоимость, высокую ремонтопригодность.
Установка малогабаритных электродвигателей с винтами позволяет получить более компактные размеры ВМГ (8, 9) по площади обдува, появляется возможность установки, например, парашюта.
Перенос части силовой электроники на трубки (11, 14, 15) и лучи (4) освобождает дополнительное полезное пространство в/на корпусе ЛА, появляется возможность использования компактных зарядных устройств.
Использование ВМГ, состоящей из малогабаритных электродвигателей с несущими винтами, обеспечивает также модульность и универсальность ВМГ (8, 9) для применения в разных типах ЛА, появляется возможность модернизации ЛА.
Регулируя скорость вращения малоразмерных несущих винтов (10) каждого по отдельности или всех вместе одновременно, с помощью малоразмерных независимо работающих электродвигателей (12), ЛА во время полета может выполнять различные действия (маневры), например, поворачивать, зависать, а также достигать определенного баланса для обеспечения стабильности и комфорта полета.
Сущность заявленного изобретения заключается в использовании (установке, размещении) вместо обычных, больших по размерам, электродвигателей с несущими винтами диаметром 140 см, группы (массива) более мелких (малогабаритных), например, 50 электродвигателей с несущими винтами диаметром 12,7 см, установленных на трубках (11, 14, 15), соединенных с лучами платформы-рамы, и на лучах платформы, при этом малогабаритные ВМГ монтируются на штатные места обычной ВМГ.
Заявленный ЛА может быть выполнен беспилотным, либо иметь кабину пилота или кабину для пилота и пассажиров и может использоваться как для перевозки пассажиров, так и для перевозки и/или доставки различных грузов в труднодоступные районы (места).
Заявленный ЛА компактен, безопасен при взлете/посадки и полете, выполнен с возможностью, как горизонтального прямолинейного полета, так и вертикального взлета/посадки, обладает высокой маневренностью, устойчивостью и управляемостью, а также повышенной скоростью полета.
На данный момент изготовлен опытный образец ЛА с ВМГ (8, 9), состоящими из малогабаритных независимо работающих электродвигателей с несущими винтами, проведены испытания ЛА.
В результате проведенных испытаний были получены следующие данные (параметры) (см. таблицу 1).
Характеристики заявленного ЛА приведены в таблице 2.

Несмотря на то что заявленная группа изобретений показана и описана со ссылкой на ее определенные варианты осуществления, специалистам в данной области техники будет понятно, что различные изменения по форме и содержанию заявленной группы изобретений могут быть сделаны в нем без отклонения от сущности и объема группы изобретений, которые определены прилагаемой формулой изобретения с учетом описания и чертежей.


Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Летательный аппарат (ЛА) вертикального взлета/посадки и горизонтального прямолинейного полета включает расположенные на определенном расстоянии друг от друга на трубках малогабаритные независимо работающие электродвигатели с несущими винтами, образующие независимо работающие винтомоторные группы (ВМГ). ВМГ расположены на определенном расстоянии друг от друга и продольной оси ЛА. Каждый малогабаритный несущий винт соединен с малогабаритным независимо работающим электродвигателем, а трубки закреплены на несущей силовой платформе-раме. Малогабаритные независимо работающие ВМГ установлены внутри экранов на лучах общей рамы и/или на трубках. Обеспечивается улучшение управляемости и маневренности полета, увеличение безопасности взлета и приземления ЛА. 2 н. и 22 з.п. ф-лы, 10 ил.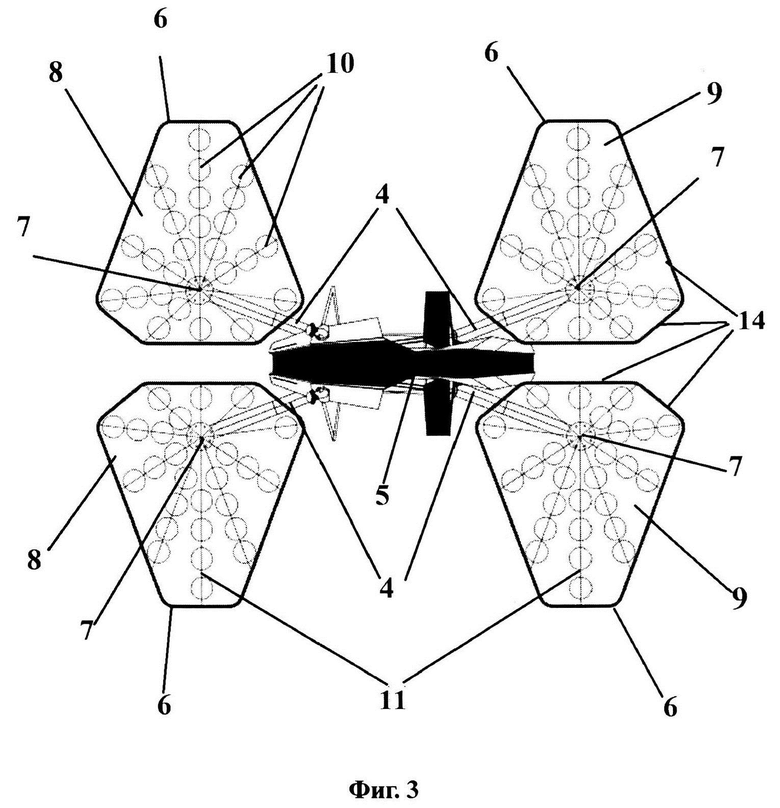
1. Летательный аппарат (ЛА) вертикального взлета/посадки и горизонтального прямолинейного полета, включающий расположенные на определенном расстоянии друг от друга на трубках малогабаритные независимо работающие электродвигатели с несущими винтами, образующие независимо работающие винтомоторные группы (ВМГ), расположенные на определенном расстоянии друг от друга и продольной оси ЛА, при этом каждый малогабаритный несущий винт соединен с малогабаритным независимо работающим электродвигателем, а трубки закреплены на несущей силовой платформе-раме.
2. ЛА по п. 1, в котором независимо работающие ВМГ установлены спереди и сзади ЛА.
3. ЛА по п. 1, в котором независимо работающие ВМГ установлены спереди, сзади и по бокам ЛА.
4. ЛА по п. 1, в котором трубки с малогабаритными независимо работающими электродвигателями и несущими винтами закреплены на несущей силовой платформе-раме, образуя ВМГ по периметру (площади), например в виде круга, треугольника, квадрата, прямоугольника, многоугольника, трапеции, параллелограмма, ромба или эллипса.
5. ЛА по п. 4, в котором независимо работающие ВМГ установлены внутри экранов.
6. ЛА по п. 5, в котором в качестве экранов используют открытые пространственные трубчатые рамы, например, в виде сферы, цилиндра, куба, эллипсоида или параллелепипеда, замкнутого или разомкнутого типа.
7. ЛА по п. 5, в котором в качестве экранов используют корпусы или кольца.
8. ЛА по п. 6, в котором независимо работающие ВМГ установлены внутри экранов таким образом, что они видимы со всех внешних сторон и к ним есть доступ.
9. ЛА по п. 7, в котором независимо работающие ВМГ установлены внутри экранов таким образом, что они видимы с определенных внешних сторон и к ним есть доступ.
10. ЛА по п. 4, в котором количество малогабаритных независимо работающих электродвигателей с несущими винтами в каждой передней, задней и боковой независимо работающей ВМГ может быть любым, но одинаково в каждой передней и задней ВМГ и в каждой боковой ВМГ, при этом их количество в передней и задней ВМГ может отличаться от количества в боковых ВМГ.
11. ЛА по п. 5, в котором количество независимо работающих ВМГ может быть любым, но одинаково спереди и сзади ЛА, и по бокам ЛА, при этом количество передних и задних ВМГ может отличаться от количества ВМГ по бокам ЛА.
12. ЛА по любому из п. 1-11, отличающийся тем, что выполнен беспилотным, либо содержит кабину для пилота и/или пассажиров, или сиденье пилота.
13. Способ размещения винтомоторных групп (ВМГ) на летательном аппарате (ЛА) для вертикального взлета/посадки и горизонтального прямолинейного полета, заключающийся в закреплении на несущей силовой платформе трубок с установленными на определенном расстоянии друг от друга малогабаритными независимо работающими электродвигателями с несущими винтами, образующими независимо работающие ВМГ, расположенные на определенном расстоянии друг от друга и продольной оси ЛА, при этом каждый малогабаритный несущий винт соединен с малогабаритным независимо работающим электродвигателем.
14. Способ по п. 13, в котором независимо работающие ВМГ установлены спереди и сзади ЛА.
15. Способ по п. 13, в котором независимо работающие ВМГ установлены спереди, сзади и по бокам ЛА.
16. Способ по п. 13, в котором трубки с малогабаритными независимо работающими электродвигателями и несущими винтами закреплены на несущей силовой платформе-раме, образуя ВМГ по периметру (площади), например в виде круга, треугольника, квадрата, прямоугольника, многоугольника, трапеции, параллелограмма, ромба или эллипса.
17. Способ по п. 16, в котором независимо работающие ВМГ установлены внутри экранов.
18. Способ по п. 17, в котором в качестве экранов используют открытые пространственные трубчатые рамы, например, в виде сферы, цилиндра, куба, эллипсоида или параллелепипеда, замкнутого или разомкнутого типа.
19. Способ по п. 17, в котором в качестве экранов используют корпусы или кольца.
20. Способ по п. 18, в котором независимо работающие ВМГ установлены внутри экранов таким образом, что они видимы со всех внешних сторон и к ним есть доступ.
21. Способ по п. 19, в котором независимо работающие ВМГ установлены внутри экранов таким образом, что они видимы с определенных внешних сторон и к ним есть доступ.
22. Способ по п. 16, в котором количество малогабаритных независимо работающих электродвигателей с несущими винтами в каждой передней, задней и боковой независимо работающей ВМГ может быть любым, но одинаково в каждой передней и задней ВМГ и в каждой боковой ВМГ, при этом их количество в передней и задней ВМГ может отличаться от количества в боковых ВМГ.
23. Способ по п. 17, в котором количество независимо работающих ВМГ может быть любым, но одинаково спереди и сзади ЛА и по бокам ЛА, при этом количество передних и задних ВМГ может отличаться от количества ВМГ по бокам ЛА.
24. Способ по любому из п. 13-23, отличающийся тем, что ЛА выполнен беспилотным либо содержит кабину для пилота и/или пассажиров, или сиденье пилота.
| Летательный аппарат вертикального взлета и посадки | 2016 |
|
RU2627220C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2603302C1 |
| CN 109484634 A, 19.03.2019 | |||
| 0 |
|
SU182884A1 | |
| WO 2018039365 A1, 01.03.2018. | |||

