Изобретение касается способа компенсации отклонения рабочей точки манипулятора согласно ограничительной части п.1 формулы изобретения.
При обработке заготовок концевым эффектором на манипулятора, как правило, существует требование непрерывно двигать и вместе с тем позиционировать манипулятор во время обрабатывающего процесса в его рабочей точке, которая может также называться Tool-Center-Point (TCP) (англ. центральная точка инструмента). В частности, когда манипулятор представляет собой многоосевой робот, настройка манипулятора основывается на расчетах, выполняемых числовым программным управлением (ЧПУ), к которым относятся планирование траектории и интерполяция, в соответствии с которыми затем происходят соответствующие настройки, напр., осей многоосевого робота.
Проводимые ЧПУ расчеты исходят при этом из разных физических параметров манипулятора, напр., длин, весов, а также других релевантных для расчетов величин. Но при этом на практике эти параметры не являются идеально постоянными, а могут изменяться, например, в зависимости от действующей в данный момент температуры. Если эти изменения не учитываются при настройке манипулятора, то получается отклонение между фактическим положением рабочей точки манипулятора и номинальным положением рабочей точки манипулятора в соответствии с расчетом. Здесь и ниже термин «ЧПУ» должен пониматься широко, так что под ним также подразумевается управление, которое включает в себя некоторые или все функциональности ПЛК (программируемый логический контроллер).
Из уровня техники и, в частности, из DE 10 2010 003 303 A1 известны способы и устройство для компенсации зависящего от температуры изменения положения на металлообрабатывающем станке. При этом ЧПУ рассчитывает номинальные значения для разных линейных осей металлообрабатывающего станка. Эти номинальные значения учитывают компенсацию температуры, которая основывается на текущих измерениях температуры и для отдельных номинальных значений данных линейных осей находит компенсационное значение и применяет к ним. Но при этом компенсационные значения зависят не только от температуры, но и дополнительно также зависят от положения линейных осей. То есть учитывается, что для точной компенсации температуры должна также учитываться компонента, зависящая от положения. В частности, чтобы также при быстрых изменениях положения можно было сразу же проводить компенсацию, компенсация определена системой жестких коэффициентов, которые применяются ЧПУ к измеряемым температурам и положениям осей в соответствии с назначением.
Однако недостатком этого уровня техники является, что, несмотря на попытку компенсации путем учета температуры, будь то зависящего от положения или не зависящего от положения, может получаться отклонение между номинальным положением и фактическим положением. Это может объясняться тем, что, напр., краевые условия, действующие во время начального замера, осуществляемого собственно в лаборатории для нахождения вышеназванных коэффициентов, уже не существуют. Так, например, может иметь место распределение удельной температуры на некотором участке манипулятора, которое также не может в достаточной степени различаться несколькими распределенными сенсорами температуры, или действующие на манипулятор технологические силы оказывают решающее влияние на положение манипулятора. Вызываемые этим отклонения не могут компенсироваться методом из уровня техники.
В связи с этим задача изобретения заключается, таким образом, в том, чтобы предоставить усовершенствованный способ компенсации отклонения рабочей точки манипулятора во время обработки заготовки концевым эффектором на манипуляторе, который может динамически реагировать путем компенсации на возникающие при обработке эффекты отклонения.
Названная проблема решается в способе компенсации отклонения рабочей точки манипулятора согласно ограничительной части п.1 формулы изобретения с помощью признаков отличительной части п.1 формулы изобретения.
Существенным для изобретения является тот факт, что путем измерения действительного положения рабочей точки во время обработки заготовки, и вместе с тем после осуществленной компенсации, компенсационные параметры в случае все еще имеющегося отклонения могут динамически адаптироваться, так что могут учитываться и компенсироваться как априори не известные возмущающие воздействия, так и изменяющиеся зависимости известных возмущающих воздействий. То есть при этом обратная связь для улучшения компенсационных параметров происходит в реальном времени.
Предпочтительный вариант осуществления зависимого пункта 2 формулы изобретения касается при этом возможности производить эту адаптацию компенсационных параметров с тактовой частотой, с которой ЧПУ производит интерполяцию. Это позволяет очень быстро реагировать на возникающие отклонения.
Существуют ЧПУ, предлагающие специальные программируемые интерфейсы, с помощью которых модули собственного программного обеспечения, напр., операторов ЧПУ или интеграторов, могут определенным образом вмешиваться в обработку ЧПУ. Таким образом, зависимые пункты 3-5 предусматривают выполнение шагов предлагаемого способа в дополнительном модуле программного обеспечения, который взаимодействует с ЧПУ через такой интерфейс. Причем этот дополнительный модуль программного обеспечения может запрашиваться, соответственно, запускаться через этот интерфейс и, со своей стороны, обращаться к информации состояния ЧПУ, соответственно, инициировать действия ЧПУ.
Одна из предпочтительных возможностей измерения фактического положения при текущей обработке, как описано в зависимом п.6 формулы изобретения, предлагается в виде наличия оптического сенсора, такого как лазерный трекер.
Дополнительное усовершенствование предусматривается зависимым п.7 формулы изобретения, по которому параметры, применяемые для компенсации, разделяются таким образом, что динамически адаптируются только определенные параметры, а остальные параметры остаются постоянными. Таким образом возможно более точное отображение физических эффектов, лежащих в основе отклонения.
Зависимый п.8 формулы изобретения касается измерения величины внешней среды как основы компенсации, причем зависимый п.9 формулы изобретения предусматривает при этом для компенсации, в частности, учет давления в качестве величины внешней среды, и это давление может, в частности, действовать на систему выравнивания веса и измеряться там. Зависимые пп.10 и 11 формулы изобретения касаются измерения фактической температуры в качестве величины внешней среды и компенсации отклонений, обусловленных температурой. Зависимый п.12 формулы изобретения, в свою очередь, предусматривает регистрацию технологической силы, действующей на концевой эффектор, с целью компенсации соответствующих эффектов.
Наконец, зависимые пп.13-15 формулы изобретения касаются случая, когда манипулятор представляет собой многоосевой робот, и предназначенных именно для этого варианта вариантов осуществления.
Другие подробности, признаки, цели и преимущества настоящего изобретения поясняются ниже с помощью чертежей только одного предпочтительного примера осуществления. На чертежах показано:
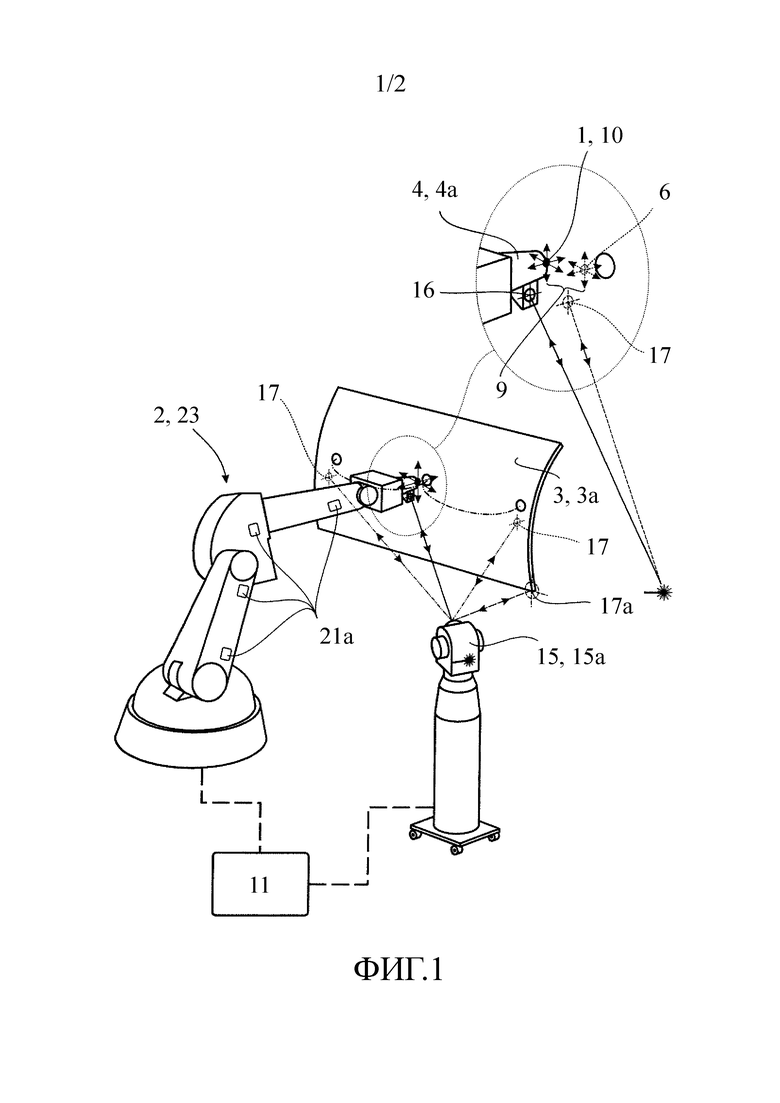
фиг.1: схематичное изображение системы, включающей в себя концевой эффектор на манипуляторе для обработки заготовки для осуществления предлагаемого способа, и
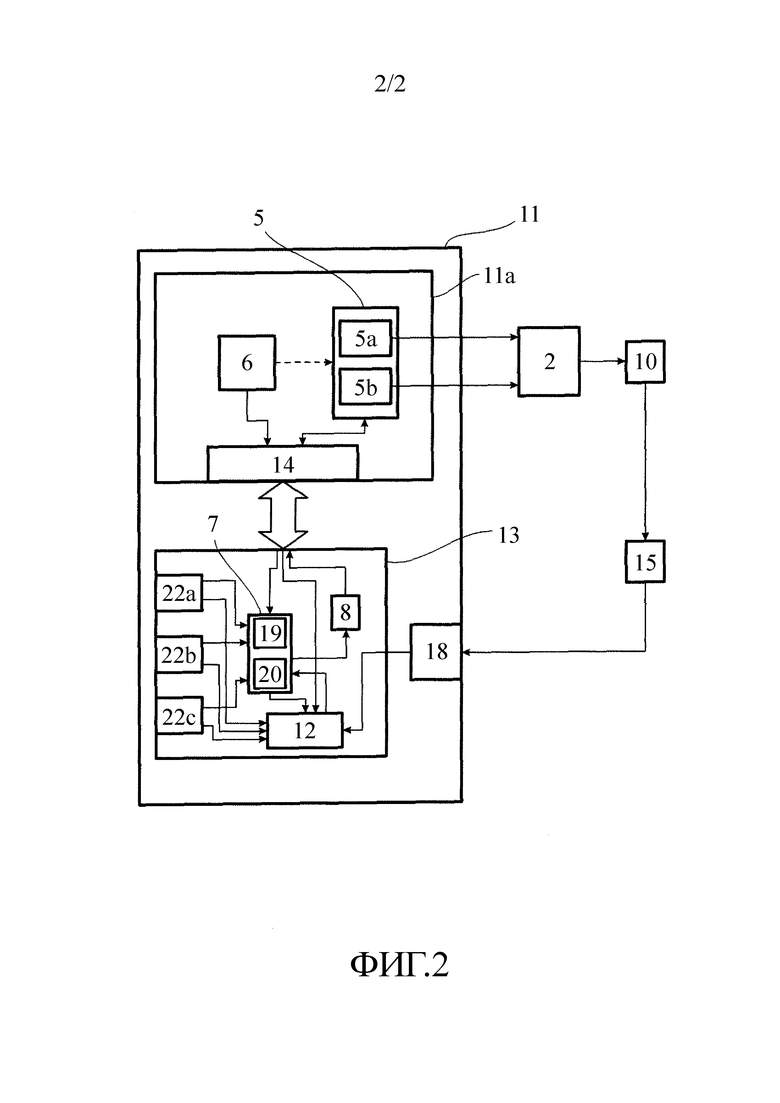
фиг.2: принципиальное изображение интерфейса между ЧПУ и дополнительным модулем программного обеспечения для осуществления предлагаемого способа.
Предлагаемый способ служит для компенсации отклонения рабочей точки 1, называемой также Tool-Center-Point (TCP), манипулятора 2 во время обработки заготовки 3 концевым эффектором на манипуляторе 2. Соответствующая система изображена на фиг.1. В изображенном примере осуществления концевой эффектор 4 представляет собой сварочное устройство 4a, а заготовка 3 - структурный компонент 3a самолета. В предлагаемом способе отрабатывается последовательность команд настройки манипулятора 2 с целью обработки заготовки 3. Эта последовательность команд может, с одной стороны, представлять собой программу ЧПУ, которая состоит из отдельных команд ЧПУ. Но она может также представлять собой последовательность команд, которая только была составлена из команд ЧПУ программы ЧПУ. Причем это составление может включать в себя разные шаги расчета, такие как, в частности, кинематическая трансформация, интерполяция или планирование траектории. Отработка осуществляется, как правило, в ЧПУ 11a, которое описывается ниже.
В соответствии с предложением на основе этой последовательности команд создается информация 5 номинального положения соответственно номинальному положению 6. То есть номинальное положение 6, которое является номинальным положением 6 рабочей точки 1, получается из последовательности команд, либо непосредственно, либо с помощью одного или нескольких шагов расчета, как в качестве примера описано выше. Итак, информация 5 номинального положения соответствует тем управляющим данным, которые были созданы из отработки этой последовательности команд и с использованием которых должен настраиваться манипулятор 2, чтобы рабочая точка 1 находилась в номинальном положении 6. При этом как рабочая точка 1, так и номинальное положение 6 может включать в себя, наряду с чистыми данными положения в трех измерениях, также данное ориентации, напр., тоже в трех измерениях. Ниже не делается различия между этими двумя возможными и при необх. дополнительными компонентами рабочей точки 1, соответственно, номинального положения 6. Информация 5 номинального положения может, соответственно, представлять собой также некоторую временную последовательность или кривую управляющих данных, с использованием которых настраивается манипулятор 2.
То есть в соответствии с предложением на основе этой информации 5 номинального положения устанавливается рабочая точка 1 манипулятора 2. Таким образом, для компенсации учитываются предварительно найденные путем замера зависимости, которые обосновывают отклонение рабочей точки 1 от номинального положения в зависимости от разных краевых условий. В соответствии с предложением для этого предусмотрено, что информация 5 номинального положения обрабатывается с использованием относящегося к информации 5 номинального положения набора 7 компенсационных параметров для нахождения компенсационного значения 8. Эта обработка может представлять собой, в принципе, любую расчетную операцию. В соответствии с предложением информация 5 номинального положения адаптируется в соответствии с этим компенсационным значением 8 для выравнивания отклонения 9 между фактическим положением 10 рабочей точки 1 и номинальным положением 6. То есть компенсационное значение 8 должно по возможности уменьшать это отклонение 9 по сравнению с ситуацией без учета компенсационного значения 8. При этом компенсационное значение 8, как и информация 5 номинального положения, может предоставляться манипулятору 2, так что эта обработка осуществляется в манипуляторе 2. Приведенные выше рассуждения о выборе размеров номинального положения по смыслу справедливы также для фактического положения 10. Альтернативно или дополнительно адаптация информации номинального положения может также осуществляться в отдельном от манипулятора 2 устройстве 11 управления, так что манипулятор 2 настраивается только с использованием адаптированной в этом смысле информации 5 номинального положения. Это устройство 11 управления может, в принципе, представлять собой любое устройство обработки данных и, в частности, компьютер, такой как промышленный ПК или т.п.
Однако здесь, как описано выше, может быть, что эта адаптация информации 5 номинального положения в соответствии с компенсационным значением 8 не достаточна для полного устранения отклонения 9. Как правило, не все эффекты, возникающие во время обработки заготовки 3, которые могут приводить к отклонению 9, могут полностью регистрироваться уже с использованием предварительно найденного набора 7 компенсационных параметров.
Поэтому предлагаемый способ отличается тем, что фактическое положение 10 измеряется во время обработки заготовки 3, что на основе сравнения между измеренным фактическим положением 10 и номинальным положением 6 находится корректирующее значение 12, и что на основе этого корректирующего значения 12 во время обработки заготовки 3 адаптируется набор 7 компенсационных параметров для уменьшения отклонения 9. Таким образом, механизм компенсации отклонения 9 еще во время обработки заготовки 3 может дополнительно оптимизироваться так, что возможно даже его полное исчезновение. Путем адаптации набора 7 компенсационных параметров изменяется соответственно также компенсационное значение 8, что приводит тогда к уменьшению отклонения 9.
Предпочтительно, чтобы информация 5 номинального положения создавалась ЧПУ 11a на основе последовательности команд, а именно, в частности, после интерполяции и/или трансформации. Это ЧПУ 11a может представлять собой самостоятельное устройство или, как изображено на фиг.2, программное обеспечение, которое при необх. выполняется вместе с другим программным обеспечением на каком-либо вычислительном устройстве, здесь устройстве 11 управления. Чтобы можно было с особенно быстрым реагированием проводить вышеописанную адаптацию во время обработки, предпочтительно, чтобы информация 5 номинального положения создавалась ЧПУ 11a в цикле интерполяции, и чтобы адаптация набора 7 компенсационных параметров для уменьшения отклонения 9 осуществлялась в цикле интерполяции. Под термином «цикл интерполяции» может пониматься период цикла, в котором ЧПУ 11a производит интерполяцию.
Особенно предпочтительно, если предлагаемый способ может применяться у уже известного ЧПУ 11a. Это осуществляется просто особенно тогда, когда, как правило, приобретенное у стороннего поставщика, ЧПУ 11a имеет соединительный интерфейс 14 для включения программного обеспечения собственной разработки. Поэтому предпочтительно, чтобы обработка информации 5 номинального положения осуществлялась с использованием относящегося к информации 5 номинального положения набора 7 компенсационных параметров для нахождения компенсационного значения 8, и адаптация набора 7 компенсационных параметров для уменьшения отклонения 9 осуществлялась в выполняющемся дополнительном модуле 13 программного обеспечения, причем этот дополнительный модуль 13 программного обеспечения через соединительный интерфейс 14 ЧПУ 11a поддерживает c ним информационно-техническую связь. Этот соединительный интерфейс 14 может представлять собой чисто программируемый интерфейс.
Этот дополнительный модуль 13 программного обеспечения может при этом находиться под контролем ЧПУ 11a, что может предусматриваться таким образом, что соответствующие точки входа дополнительного модуля 13 программного обеспечения передаются в качестве обратной функции в ЧПУ 11a. Так, предпочтительно, чтобы соединительный интерфейс 14 осуществлял информационно-технический запрос дополнительного модуля 13 программного обеспечения на основе текущих событий ЧПУ 11a. Но ЧПУ 11a может также инициировать процессы в дополнительном модуле 13 программного обеспечения посредством другого информационного технического механизма, когда, напр., открываются семафоры. Наоборот, также предпочтительно предусмотрено, что дополнительный модуль 13 программного обеспечения может через соединительный интерфейс 14 осуществлять информационно-технический запрос функций ЧПУ 11a.
Через этот соединительный интерфейс 14 дополнительный модуль 13 программного обеспечения может также получать возможность доступа к информации, требуемой или полезной для нахождения компенсационного значения 8. То есть предпочтительно дополнительный модуль 13 программного обеспечения принимает информацию состояния манипулятора 2, которая, в частности, может включать в себя фактическое положение 10 и/или информацию 5 номинального положения и/или номинальное положение 6, через соединительный интерфейс 14. Альтернативно и как изображено на фиг.2, дополнительный модуль программного обеспечения может принимать фактическое положение 10 также независимо от ЧПУ 11a и вместе с тем соединительного интерфейса 14.
Оптическая регистрация предназначена, в частности, для того, чтобы надежно определять фактическое положение 10 рабочей точки 1. Как изображено на фиг.1, поэтому предпочтительно, чтобы во время обработки заготовки 3 фактическое положение 10 измерялось оптическим сенсором 15 положения. Особенно пригоден при этом, в соответствии с изображением на фиг.1, лазерный трекер 15a, причем для измерения фактического положения 10 могут также применяться несколько лазерных трекеров 15a. При этом лазерный трекер 15a нацеливается на рефлектор 16 на манипуляторе 2. Адаптация набора 7 компенсационных параметров может производиться тем точнее, чем больше различных измерений производятся оптическим сенсором 15 положения. Как изображено также на фиг.1, поэтому предпочтительно, чтобы оптический сенсор 15 положения производил измерение фактического положения 10 во множестве положений 17 обработки на заготовке 3, причем эти положения 17 обработки последовательно настраиваются манипулятором 2 для обработки концевым эффектором 4. На фиг.1 эти положения 17 обработки обозначены соответствующим положением рефлектора 16 в каждом положении 17 обработки.
В таком случае набор 7 компенсационных параметров может адаптироваться на основе корректирующего значения 12 из нескольких сравнений между измеренным фактическим положением 10 и номинальным положением 6. Положение 17a отсчета оптического сенсора 15 положения здесь тоже определено на заготовке 3. Предпочтительно также, чтобы оптический сенсор 15 положения был соединен информационно-технической связью посредством выполняющегося измерительного программного обеспечения 18 с ЧПУ 11a и/или дополнительным модулем 13 программного обеспечения.
Уже при определении набора 7 компенсационных параметров может делаться различие, с одной стороны, между теми параметрам, которые могут считаться обусловленными типом или конструкцией, и, с другой стороны, теми параметрами, которые могут отличаться у разных манипуляторов. Первые названные параметры могут также считаться неизменяемыми параметрами модели, которые фундаментально определяют расчетную модель вообще, а последние названные параметры - параметрами, которые затем наполняют эту модель частными значениями. Таким образом, предпочтительно, чтобы набор 7 компенсационных параметров включал в себя, в частности, относящийся к данному типу манипулятора набор 19 параметров модели - здесь соответственно первым названным параметрам - и набор 20 физических данных - соответственно вторым названным параметрам. Набор 20 физических данных может включать в себя относящуюся к манипулятору 2 информацию массы (то есть в смысле веса) и дополнительно или альтернативно информацию центра тяжести массы. Предпочтительно только набор 19 параметров модели адаптируется на основе корректировочного значения 12 для уменьшения отклонения 9.
По одному из предпочтительных вариантов осуществления набор 7 компенсационных параметров служит для того, чтобы также компенсировать влияние измеримой величины внешней среды на фактическое положение 10 рабочей точки 1. То есть тогда в основу компенсации кладется не только информация 5 номинального положения, но и эта измеренная величина внешней среды. При этом в настоящем случае термин «внешняя среда» должен толковаться широко и включает в себя любые физические, в частности также возникающие на или в манипуляторе и измеримые воздействия.
Поэтому предпочтительно, чтобы во время обработки заготовки 3 измерялось по меньшей мере одну величину внешней среды, и чтобы набор 7 компенсационных параметров включал в себя относящийся к данной измеренной величине внешней среды компенсационный параметр внешней среды, причем с помощью этого компенсационного параметра внешней среды обрабатывается данная измеренная величина внешней среды для нахождения компенсационного значения 8. Измерение указанной по меньшей мере одной величины внешней среды осуществляется предпочтительно с помощью системы сенсоров внешней среды, в соответствии с примером фиг.1 с помощью системы 21a сенсоров температуры.
Один из предпочтительных вариантов предусматривает, что указанная по меньшей мере одна величина внешней среды включает в себя давление 22a. Это давление 22a может представлять собой давление 22a, действующее на манипулятор 2, и здесь, в частности, на систему выравнивания веса манипулятора 2.
По другому предпочтительному варианту указанная по меньшей мере одна величина внешней среды включает в себя фактическую температуру 22b. Эта фактическая температура 22b может, прежде всего, представлять собой фактическую температуру 22b на манипуляторе 2. Эта измеренная фактическая температура 22b может быть при этом связана как с нагревом извне, так и с нагревом при эксплуатации манипулятора 2. То есть предпочтительно на эту фактическую температуру 22b влияет внешнее тепло и собственный нагрев манипулятора 2.
Один из предпочтительных вариантов осуществления здесь предусматривает, что компенсационный параметр внешней среды включает в себя зависящий от материала коэффициент температурного расширения и/или, в частности, относящийся к данной оси коэффициент температурного изгиба и/или, в частности, относящийся к данной оси параметр длины. Также предпочтительно, чтобы этот компенсационный параметр внешней среды относился к измеренной фактической температуре 22b.
Так, вышеназванный параметр длины может включать в себя - измеренное, оценочное или расчетное - данное длины, которое может относиться к расстоянию между двумя осями манипулятора 2. Коэффициент температурного расширения может представляться коэффициент расширения, который относится к материалу манипулятора 2. Также коэффициент температурного изгиба может относиться к изгибу участка между двумя осями, аналогично вышеназванному параметру длины. Компенсационный параметр внешней среды может также включать в себя взвешивание этих отдельных параметров и коэффициентов.
Другой предпочтительный вариант предусматривает, что указанная по меньшей мере одна величина внешней среды включает в себя технологическую силу 22c, действующую на манипулятор 2, и/или на концевой эффектор 4. Под такой технологической силой 22c следует понимать силу, передаваемую от концевого эффектора 4, в частности, на заготовку 3 во время обработки, причем эта сила тогда соответственно также воспринимается манипулятором 2 и там может приводить, например, к изгибам.
Манипулятор 2 представляет собой предпочтительно - и как изображено на фиг.1 - многоосевой робот 23. Соответственно предпочтительно, чтобы информация 5 номинального положения включала в себя информацию 5a оси многоосевого робота 23. То есть под такой информацией 5a оси следует понимать информацию, которая относится к одной или нескольким осям многоосевого робота 23. Речь может идти, в частности, об информации номинального положения какой-либо оси многоосевого робота 23. В частности, информация 5a оси может включать в себя номинальную информацию о горизонтальной главной оси многоосевого робота 23. Информация 5a оси может также задавать номинальное положение всех осей многоосевого робота 23, так что при этом такой информацией 5a оси может быть также однозначно определено номинальное положение 6. Предпочтительно информация 5a оси указывает номинальное положение 6 в шарнирных координатах многоосевого робота 23.
Также предпочтительно предусмотрено, что набор 7 компенсационных параметров включает в себя некоторый относящийся к информации 5a оси компенсационный параметр оси, с помощью которого обрабатывается информация 5a оси для нахождения корректирующего значения 12. Другими словами, корректирующее значение 12 зависит от информации 5a оси. Здесь, в частности, может быть, что с использованием доли корректирующего значения 12, приходящейся на компенсационный параметр оси, адаптируется информация 5a оси и предпочтительно только информация 5a оси. При этом с помощью компенсационного параметра оси может целенаправленно компенсироваться информация 5a оси и, в частности, вышеназванная номинальная информация горизонтальной главной оси многоосевого робота 23, так что сложность расчетов для выравнивания отклонения 9 в целом уменьшается.
По одному из предпочтительных вариантов осуществления информация 5 номинального положения включает в себя информацию 5b в декартовых координатах. При этом речь может идти о некотором данном положения в декартовых координатах, которое соответствует номинальному положению 6. Здесь также предпочтительно предусмотрено, что информация 5a оси была создана на основе информации 5b в декартовых координатах. Этот процесс называется также обратной трансформацией, при этом трансформация шарнирных координат в декартовы координаты называется прямой трансформацией. Предпочтительно предусмотрено, что набор 7 компенсационных параметров включает в себя некоторый относящийся к информации 5b в декартовых координатах абсолютный компенсационный параметр, с использованием которого обрабатывается информация 5b в декартовых координатах для нахождения корректирующего значения 12. То есть таким образом может предоставляться механизм компенсации отклонения, который по меньшей мере также непосредственно учитывает декартовы координаты номинального положения 6, соответственно, соответствующую часть информации 5b номинального положения. При известных условиях это может означать снижение трудоемкости вычисления, соответственно, сложности по сравнению, например, с исключительным учетом шарнирных координат в смысле информации 5a оси.
Изобретение относится к области обработки заготовок (3) с помощью концевого эффектора (4) манипулятора (2). Способ компенсации отклонения рабочей точки (1) во время обработки включает отработку последовательности команд настройки манипулятора (2), создание на основе этой последовательности команд информации (5) о номинальном положении в соответствии с номинальным положением (6) рабочей точки (1), при этом информацию (5) обрабатывают с помощью набора (7) компенсационных параметров для нахождения компенсационного значения (8), в соответствии с которым информацию (5) адаптируют для уменьшения отклонения (9) между фактическим положением (10) рабочей точки (1) и ее номинальным положением (6), на основе сравнения между измеренным фактическим положением (10) рабочей точки (1) и ее номинальным положением (6) определяют корректирующее значение (12), на основе которого во время обработки заготовки (3) адаптируют набор (7) компенсационных параметров для уменьшения упомянутого отклонения (9). Использование изобретения позволяет повысить точность отработки команд настройки манипулятора (2) и соответственно качество обработки заготовок (3). 14 з.п. ф-лы, 2 ил.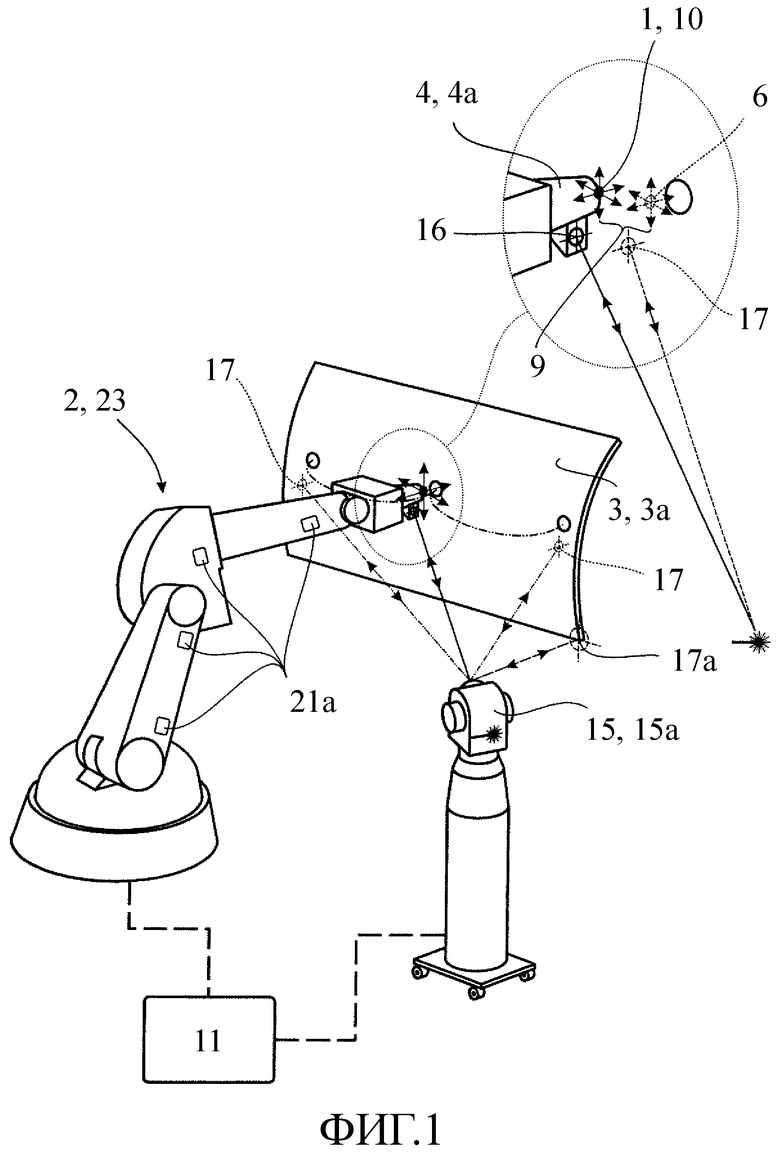
1. Способ компенсации отклонения рабочей точки (1) манипулятора (2) во время обработки заготовки (3) концевым эффектором (4) на манипуляторе (2), при этом отрабатывают последовательность команд настройки манипулятора (2) с целью обработки заготовки (3), и на основе этой последовательности команд создают информацию (5) номинального положения соответственно номинальному положению (6), и на основе этой информации (5) номинального положения устанавливают рабочую точку (1) манипулятора (2), при этом информацию (5) номинального положения обрабатывают с помощью относящегося к информации (5) номинального положения набора (7) компенсационных параметров для нахождения компенсационного значения (8), и информацию (5) номинального положения адаптируют в соответствии с этим компенсационным значением (8) для выравнивания отклонения (9) между фактическим положением (10) рабочей точки (1) и номинальным положением (6),
отличающийся тем,
что фактическое положение (10) измеряют во время обработки заготовки (3), что на основе сравнения между измеренным фактическим положением (10) и номинальным положением (6) находят корректирующее значение (12) и что на основе этого корректирующего значения (12) во время обработки заготовки (3) адаптируют набор (7) компенсационных параметров для уменьшения отклонения (9).
2. Способ по п.1, отличающийся тем, что информация (5) номинального положения создается ЧПУ (11a), в частности, после интерполяции и/или трансформации на основе последовательности команд, предпочтительно, что информация (5) номинального положения создается ЧПУ (11a) в цикле интерполяции и что адаптация набора 7 компенсационных параметров для уменьшения отклонения (9) осуществляется в цикле интерполяции.
3. Способ по п.2, отличающийся тем, что обработка информации (5) номинального положения осуществляется с помощью относящегося к информации (5) номинального положения набора (7) компенсационных параметров для нахождения компенсационного значения (8) и адаптация набора (7) компенсационных параметров для уменьшения отклонения (9) осуществляется в выполняющемся дополнительном модуле (13) программного обеспечения, причем этот дополнительный модуль (13) программного обеспечения через соединительный интерфейс (14) ЧПУ (11a) поддерживает c ним информационно-техническую связь.
4. Способ по п.3, отличающийся тем, что соединительный интерфейс (14) осуществляет информационно-технический запрос дополнительного модуля (13) программного обеспечения на основе текущих событий ЧПУ (11a).
5. Способ по п.3 или 4, отличающийся тем, что дополнительный модуль (13) программного обеспечения принимает информацию состояния манипулятора (2), в частности, включающую в себя фактическое положение (10), и/или информацию (5) номинального положения, и/или номинальное положение (6), через соединительный интерфейс (14).
6. Способ по одному из пп.1-5, отличающийся тем, что во время обработки заготовки (3) фактическое положение (10) измеряется оптическим сенсором (15) положения, в частности лазерным трекером (15a), предпочтительно, что оптический сенсор (15) положения соединен информационно-технической связью через выполняющееся измерительное программное обеспечение (18) с ЧПУ (11a) и/или дополнительным модулем (13) программного обеспечения.
7. Способ по одному из пп.1-6, отличающийся тем, что набор (7) компенсационных параметров включат в себя, в частности, относящийся к данному типу манипулятора набор (19) параметров модели и набор (20) физических данных, предпочтительно включающий в себя относящуюся к манипулятору (2) информацию массы и/или информацию центра тяжести массы, и что также, в частности, только набор (19) параметров модели адаптируется на основе корректировочного значения (12) для уменьшения отклонения (9).
8. Способ по одному из пп.1-7, отличающийся тем, что во время обработки заготовки (3) измеряется по меньшей мере одна величина внешней среды и что набор (7) компенсационных параметров включает в себя относящийся к данной измеренной величине окружающей среды компенсационный параметр окружающей среды, причем с помощью этого компенсационного параметра внешней среды обрабатывается данная измеренная величина внешней среды для нахождения компенсационного значения (8).
9. Способ по п.8, отличающийся тем, что указанная по меньшей мере одна величина внешней среды включает в себя давление (22a), предпочтительно давление (22a), действующее на манипулятор (2), в частности на систему выравнивания веса манипулятора (2).
10. Способ по п.8 или 9, отличающийся тем, что указанная по меньшей мере одна величина внешней среды включает в себя фактическую температуру (22b), предпочтительно фактическую температуру (22b) на манипуляторе (2), в частности, что на эту фактическую температуру (22b) влияет внешнее тепло и собственный нагрев манипулятора (2).
11. Способ по п.10, отличающийся тем, что компенсационный параметр внешней среды включает в себя зависящий от материала коэффициент температурного расширения, и/или, в частности, относящийся к оси коэффициент температурного изгиба, и/или, в частности, относящийся к оси параметр длины, предпочтительно, этот компенсационный параметр внешней среды относится к измеренной фактической температуре (22b).
12. Способ по одному из пп.1-11, отличающийся тем, что указанная по меньшей мере одна величина внешней среды включает в себя технологическую силу (22c), действующую на манипулятор (2) и/или на концевой эффектор (4).
13. Способ по одному из пп.1-12, отличающийся тем, что манипулятор (2) представляет собой многоосевой робот (23), предпочтительно, что информация (5) номинального положения включает в себя информацию (5a) оси многоосевого робота (23), в частности, что информация (5a) оси включает в себя номинальную информацию о горизонтальной главной оси.
14. Способ по п.13, отличающийся тем, что набор (7) компенсационных параметров включает в себя относящийся к информации (5a) оси компенсационный параметр оси, с помощью которого обрабатывается информация (5a) оси для нахождения корректирующего значения (12), предпочтительно, что посредством доли корректирующего значения (12), приходящейся на компенсационный параметр оси, адаптируется, предпочтительно только, информация (5a) оси.
15. Способ по одному из пп.1-14, отличающийся тем, что информация (5) номинального положения включает в себя информацию (5b) в декартовых координатах, предпочтительно, что информация (5a) оси была создана на основе информации (5b) в декартовых координатах, в частности, что набор (7) компенсационных параметров включает в себя относящийся к информации (5b) в декартовых координатах абсолютный компенсационный параметр, с помощью которого обрабатывается информация (5b) в декартовых координатах для нахождения корректирующего значения (12).
| ПРОИЗВОДСТВЕННАЯ ПОЗИЦИОНИРУЮЩАЯ СИСТЕМА | 1997 |
|
RU2177403C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННОГО РОБОТА | 2011 |
|
RU2472612C1 |
| Роботизированный сборочный комлекс | 1988 |
|
SU1662812A1 |
| US 5903459 A, 11.05.1999 | |||
| US 6345213 B1, 05.02.2002 | |||
| US 2009177438 A1, 09.07.2009 | |||
| DE 3302063 A1, 26.07.1984. | |||

