Изобретение относится к навигации и может быть использовано для автоматического управления посадкой летательного аппарата (ЛА), коррекции инерциальных навигационных систем ЛА на стартовой позиции в процессе взлета.
Известен способ определения положения ЛА в пространстве с помощью оптического навигационного устройства, реализованный в патенте РФ на изобретение [Патент RU 2083444, 8 МПК B64F 1/20, опубл. 10.07.1997], который состоит в формировании трех цветовых зон в окрестности посадочной траектории и визуальном восприятии летчиком излучения в заданной длине волны, по которой определяется положение ЛА относительно створа взлетно-посадочной полосы (ВПП). Каждый из лазерных маяков создает две непересекающихся (прилегающих) цветовые зоны. Первый маяк формирует желтую и зеленую зоны, а второй маяк - зеленую и красную. Излучение маяков направляют так, чтобы линии прилегания цветовых зон первого и второго маяков были параллельны оси ВПП, при этом формируется центральная зона зеленого цвета - створная полоса, и две боковых зоны желтого и красного цветов соответственно.
Недостатками этого способа являются:
низкая информативность, проявляющаяся в определении только одного параметра - бокового отклонения от оси ВПП;
низкая точность, обусловленная неопределенным положением ЛА в пределах каждой цветовой зоны излучения;
визуальная оценка летчиком положения ЛА, что приводит к необходимости участия человека в контуре управления самолетом, при этом автоматическая посадка невозможна.
Известен способ определения местоположения и углов ориентации летательного аппарата относительно взлетно-посадочной полосы [Патент RU 2378664 А, 8 МПК G01S 11/00, опубл. 10.01.2010], основанный на формировании области излучения посадочной траектории посредством двух лазерных маяков, приеме сигналов от источников излучения посредством двух бортовых разнесенных цифровых фотокамер и вычислении местоположения ЛА относительно ВПП,
Недостатками этого способа являются:
Информационная недостаточность системы, что связано с применением двух маяков, поскольку два маяка принципиально не позволяют определять положение твердого тела (в нашем случае земли), например, любое вращение ЛА вокруг оси проходящей через два маяка не изменяет положения изображений маяков на фотоматрицах, при этом координаты ЛА относительно ВИИ могут меняться существенным образом.
Низкая точность измерения параметров положения летательного аппарата, обусловленная дискретным представлением изображения ВИИ посредством цифровой фотокамеры.
Технический результат при использовании изобретения заключается в повышении информативности, что достигается применением трех разнесенных лазерных маяков не лежащих на одной прямой. Повышение точности измерения координат ЛА относительно ВИИ и углов его ориентации, достигается за счет использования субпиксельной обработки изображений трех наземных лазерных маяков, снимаемых с двух цифровых фотокамер и вычислителя, алгоритм которого не содержит упрощений, приводящих к методическим погрешностям измерений.
Указанный технический результат изобретения достигается тем, что в способе определения координат летательного аппарата относительно взлетно-посадочной полосы, основанном на приеме сигналов лазерных маяков с известными координатами, двумя разнесенными цифровыми фотокамерами, определении координат лазерных маяков на фотоматрицах и вычислении с их использованием координат летательного аппарата относительно взлетно-посадочной полосы, принимают сигналы по меньшей мере трех лазерных маяков, не лежащих на одной прямой, осуществляют субпиксельную обработку оцифрованных изображений снимаемых с фотоматриц, в результате чего определяют координаты центров яркости изображений лазерных маяков и вычисляют координаты лазерных маяков относительно летательного аппарата, с использованием которых вычисляют матрицу направляющих косинусов, углы ориентации и координаты летательного аппарата относительно взлетно-посадочной полосы.
Сущность изобретения состоит в том, что осуществляется:
прием сигналов трех одинаковых лазерных маяков с известными координатами относительно ВПП, не лежащих на одной прямой;
субпиксельная обработка оцифрованных изображений снимаемых с фотоматриц, в результате чего определяются координаты центров яркости изображений лазерных маяков;
вычисление координат лазерных маяков относительно летательного аппарата;
вычисление матрицы направляющих косинусов, углов ориентации и координат летательного аппарата относительно взлетно-посадочной полосы.
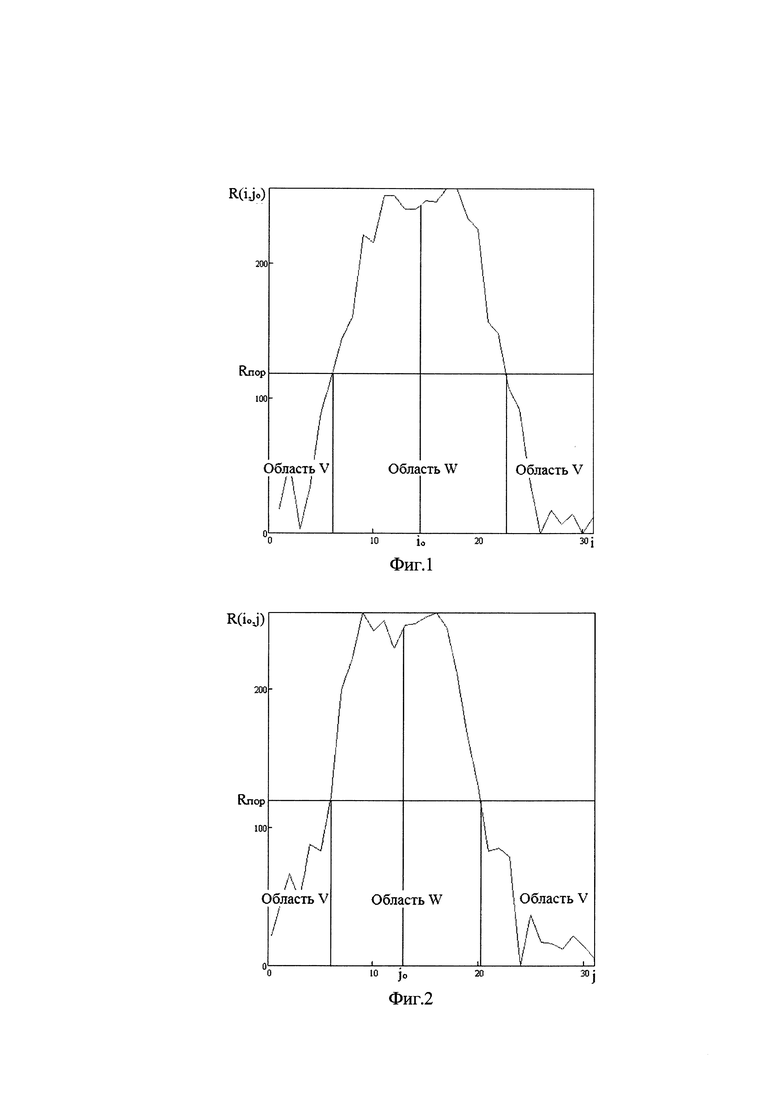
Известные алгоритмы субпиксельной обработки изображений описаны в работе [Визильтер Ю.В. Обработка и анализ изображений в задачах машинного зрения. М: Физматгиз, 2010. С. 249.], которые основаны на использовании метода наименьших квадратов либо корреляционного анализа, оба требуют значительных вычислительных ресурсов процессора, что очень нецелесообразно для обработки в реальном времени. Более экономичный в вычислительном отношении алгоритм субпиксельного определения координат изображения маяка на фотоматрице основан на определении центра функции яркости. Изображение маяка на фотоматрице представляет собой фигуру, близкую к кругу, диаметром десятки пикселов, причем это изображение формируется при наличии шумов фотоматрицы, накладываемых на собственно изображение, полученное посредством фотообъектива. Структура реального изображения представлена в виде графиков изменения яркости сигналов R(i,jo) - в зависимости от номера пиксела по строке на фиг. 1 и R(io,j) - по столбцу на фиг. 2, где обозначено:
io, jo - координаты центрального пиксела изображения маяка;
W - внутренняя область изображения маяка, удовлетворяющая условию R(i,j)≥Rnop;
V - внешняя область изображения маяка, удовлетворяющая условию R(i,j)<Rnop, при этом внешней границей области V является окружность радиусом равным диаметру внутренней границы области V; R(i,j) - яркость пикселов в зависимости от номера строки i и столбца j;
 - пороговое значение функции яркости;
- пороговое значение функции яркости;
Iвн - число пикселов во внутренней области W изображения маяка;
Iвнеш - число пикселов во внешней области V изображения маяка;
Центр функции яркости изображения маяка определяется подобно тому, как вычисляется центр массы объемного тела [Справочник по математике для учащихся втузов. Бронштейн И.Н., Семендяев К.А.М.: Наука, 1981. С. 332].
где r - размер пиксела,  - интегральная яркость изображения области W.
- интегральная яркость изображения области W.
Углы ориентации и координаты летательного аппарата относительно взлетно-посадочной полосы определяются путем применения трех наземных маяков и бортовой системы технического зрения при этом, координаты маяков относительно ВПП известны, а алгоритм вычисления состоит в последовательном применении соотношений (2), (3), (4), (5) и (1) [Авиакосмическое приборостроение, 2011 г. №3, С. 23].
Техническая реализация предложенного способа в настоящее время возможна, например с использованием следующих компонентов:
цифровая фотокамера - XSW-640 SWIR OEM (производства фирмы Xenics);
лазерный излучатель - ЛПИ-120 (АО «НИИ «ПОЛЮС» им. М.Ф. СТЕЛЬМАХА»);
цифровой вычислитель - Эльбрус-8с (ЗАО «МЦСТ», г. Москва).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2018 |
|
RU2700908C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347240C2 |
| СПОСОБ ЛОКАЛЬНОЙ НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2706444C1 |
| Способ обеспечения посадки вертолета | 2016 |
|
RU2621215C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2013 |
|
RU2521972C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Способ навигации подвижного объекта | 2016 |
|
RU2626017C1 |
| СПОСОБ ГРУППОВОЙ ВИДЕОНАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2758285C1 |
Изобретение относится к навигации и может быть использовано для автоматического управления посадкой летательного аппарата, коррекции инерциальных навигационных систем на стартовой позиции в процессе взлета. Способ определения координат летательного аппарата относительно взлетно-посадочной полосы основан на приеме двумя разнесенными цифровыми фотокамерами сигналов по меньшей мере трех лазерных маяков с известными координатами, не лежащих на одной прямой и установленных на взлетно-посадочной полосе. При этом осуществляют субпиксельную обработку оцифрованных изображений, снимаемых с фотоматриц, в результате чего определяют координаты центров яркости изображений лазерных маяков и вычисляют координаты лазерных маяков относительно летательного аппарата, с использованием которых вычисляют матрицу направляющих косинусов, углы ориентации и координаты летательного аппарата относительно взлетно-посадочной полосы. Технический результат заключается в обеспечении возможности повышения точности измерения параметров положения летательного аппарата. 1 з.п. ф-лы, 2 ил.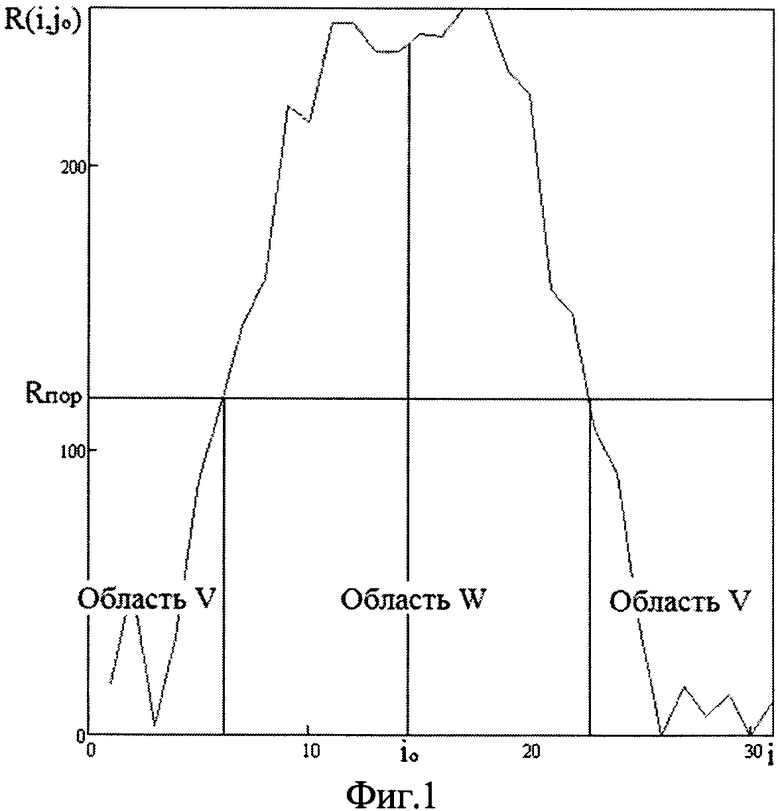
1. Способ определения координат летательного аппарата относительно взлетно-посадочной полосы, основанный на приеме сигналов лазерных маяков с известными координатами, установленных на взлетно-посадочной полосе, двумя разнесенными цифровыми фотокамерами, определении координат лазерных маяков на фотоматрицах и вычислении с их использованием координат летательного аппарата относительно взлетно-посадочной полосы, отличающийся тем, что принимают сигналы по меньшей мере трех лазерных маяков, не лежащих на одной прямой, осуществляют субпиксельную обработку оцифрованных изображений, снимаемых с фотоматриц, в результате чего определяют координаты центров яркости изображений лазерных маяков и вычисляют координаты лазерных маяков относительно летательного аппарата, с использованием которых вычисляют матрицу направляющих косинусов, углы ориентации и координаты летательного аппарата относительно взлетно-посадочной полосы.
2. Способ определения координат летательного аппарата относительно взлетно-посадочной полосы по п. 1, отличающийся тем, что субпиксельная обработка оцифрованных изображений заключается в определении центра яркости изображения маяка.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| WO 2016016604 A1, 04.02.2016 | |||
| ПРЕОБРАЗОВАТЕЛЬ ТОКА В ЧАСТОТУ ИМПУЛЬСОВ | 2006 |
|
RU2310271C1 |
| US 6414712 B1, 02.07.2002. | |||

