Изобретение относится к транспортировке и хранению штучных грузов или материалов и может найти применение в любой отрасли производства.
Широко известны гравитационные стеллажи для поддонов (1).
Они представляют собой стеллажные системы, которые состоят из неподвижного каркаса и закрепленных на нем роликовых дорожек (рольгангов), которые расположены под углом 3-5 градусов к горизонту. Груз движется по стеллажу к месту выгрузки за счет собственного веса. Цилиндрические ролики служат несущими элементами конвейеров, а для контроля скорости движения груза используются тормозные механизмы. При загрузке первый поддон останавливается, достигнув упора. Во избежание давления задних поддонов на передние они разделяются механизмами разделителей нагрузки. Это дает возможность беспрепятственно снимать поддоны со стеллажей. Основными недостатками данной системы являются ее высокая материалоемкость и трудоемкость изготовления, обусловленная необходимостью изготовления и монтажа значительного количества роликов и вспомогательных механизмов, что в свою очередь объясняет высокую стоимость данных систем. Кроме того, заявленный угол уклона роликовых дорожек величиной (не менее 3 градусов) обуславливает значительный перепад по высоте между начальной и конечной точками наклонного пути, а, следовательно, уменьшение полезного объема хранения.
Известен также склад для хранения штучных грузов, оборудованный наклонными стеллажами, на которые устанавливается тара, представляющая собой короб, ко дну которого прикреплены четыре катка, выступающие за габариты короба. Катки тары устанавливаются на шарикоподшипниках, а однорядные стеллажи представляют собой металлоконструкцию, каждая ячейка которой состоит из двух уголков, наклоненных от места загрузки к месту выгрузки под небольшим углом и имеющих у места выгрузки на конце неподвижный упор для удержания тары. Тара устанавливается на эти стеллажи, скатывается под действием собственного веса до удара передними катками в неподвижный упор. (2)
Недостатком данной конструкции является высокая вероятность повреждения катков при ударе о неподвижный упор и отсутствие надежной фиксации тары от опрокидывания в конечной точке перемещения.
Наиболее близким по технической сути к предлагаемому решением является склад для хранения затаренных грузов, содержащий гравитационные стеллажи с амортизирующими упорами в местах перегрузки, тележки с буферами и погрузочно-разгрузочное устройство с захватами, при этом погрузочно-разгрузочное устройство размещено над стеллажами, а буферы установлены в верхней части тележек для взаимодействия с захватами погрузочно-разгрузочного устройства. (3)
Недостатком данной системы являются наличие дополнительных буферов на каждой тележке, что усложняет конструкцию и увеличивает себестоимость их изготовления, а также необходимость использования дополнительных захватов специальной конструкции на погрузочно-загрузочном устройстве.
На устранение указанных недостатков, а именно, на упрощение конструкции, увеличение полезного объема хранения, обеспечение надежной фиксации контейнера от опрокидывания в конечной точке направляющих и исключения вероятности повреждения роликов при ударе о неподвижный упор с целью создания надежной и обладающей низкой себестоимостью изготовления системы хранения штучных изделий и материалов в условиях производства, направлено данное изобретение.
Эта цель достигается тем, что в предлагаемой системе ролики закреплены на боковых сторонах контейнеров с возможностью качения вдоль направляющих неподвижного каркаса, что обеспечивает конструктивную возможность увеличения диаметра роликов по отношению к диаметру роликов дорожек гравитационных стеллажей и, как следствие, уменьшения коэффициента трения качения и угла уклона направляющих по направлению движения контейнеров, который не превышает 3 градусов, в то время как у гравитационных стеллажей этот угол составляет от 3 до 5 градусов, при этом тормозные устройства представляют собой комбинацию, состоящую из упругих упоров, закрепленных на концах направляющих перпендикулярно направлению движения контейнеров и фиксаторов, представляющих из себя плоские пластины, расположенные параллельно поверхности направляющих на расстоянии, превышающем диаметр ролика, причем максимальное расстояние от упора до края фиксатора должно быть не менее расстояния от плоскости передней стенки контейнера до плоскости, параллельной ей и проходящей через ось дальнего по ходу ролика контейнера, часть направляющих выполнена с уклоном в направлении, противоположном направлению основного уклона, направляющие выполнены с дополнительным уклоном, который находится в пределах 1 градуса по отношению к основному углу уклона направляющих, и начинается на расстоянии от плоскости упора, не превышающем длину контейнера, направляющие выполнены с горизонтальным участком, который начинается от начала направляющей, и его длина превышает расстояние между осями переднего и заднего роликов контейнера, направляющие снабжены предохранительными устройствами храпового типа, выполненными с возможностью пропускать контейнер при движении в прямом направлении и препятствовать движению в обратном направлении и расположенными в начале горизонтального участка.
Сущность изобретения поясняется чертежами, где изображено:
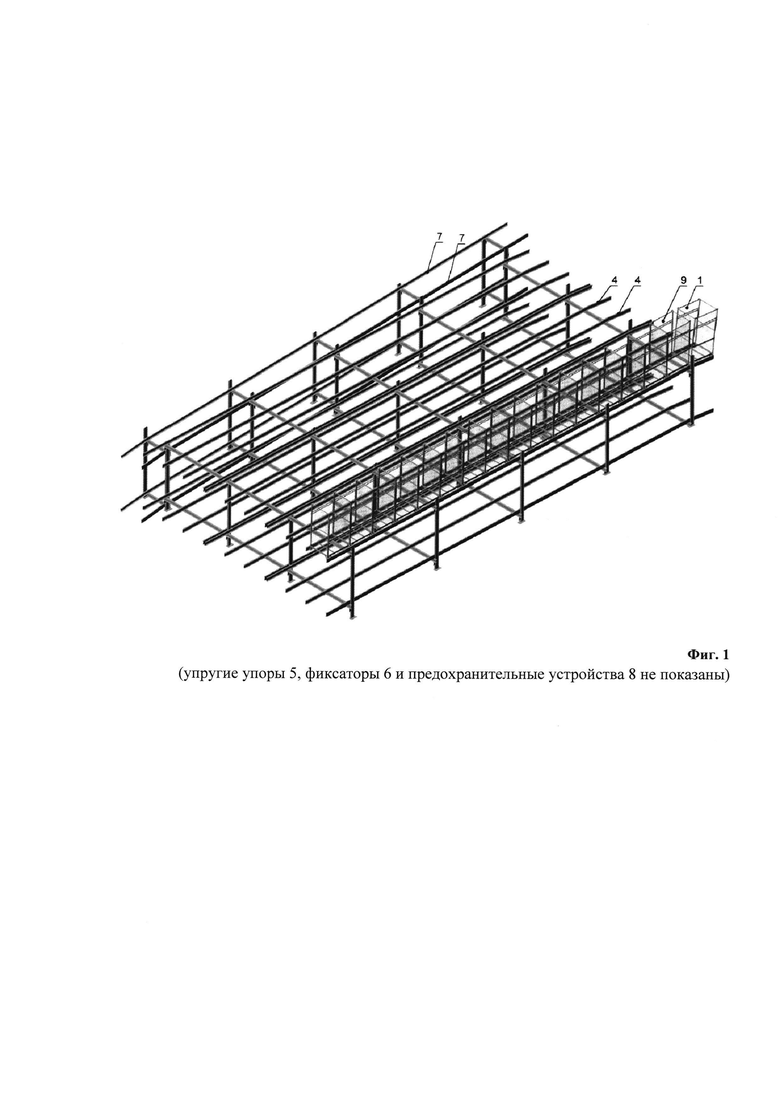
на фиг. 1 - общий вид системы,
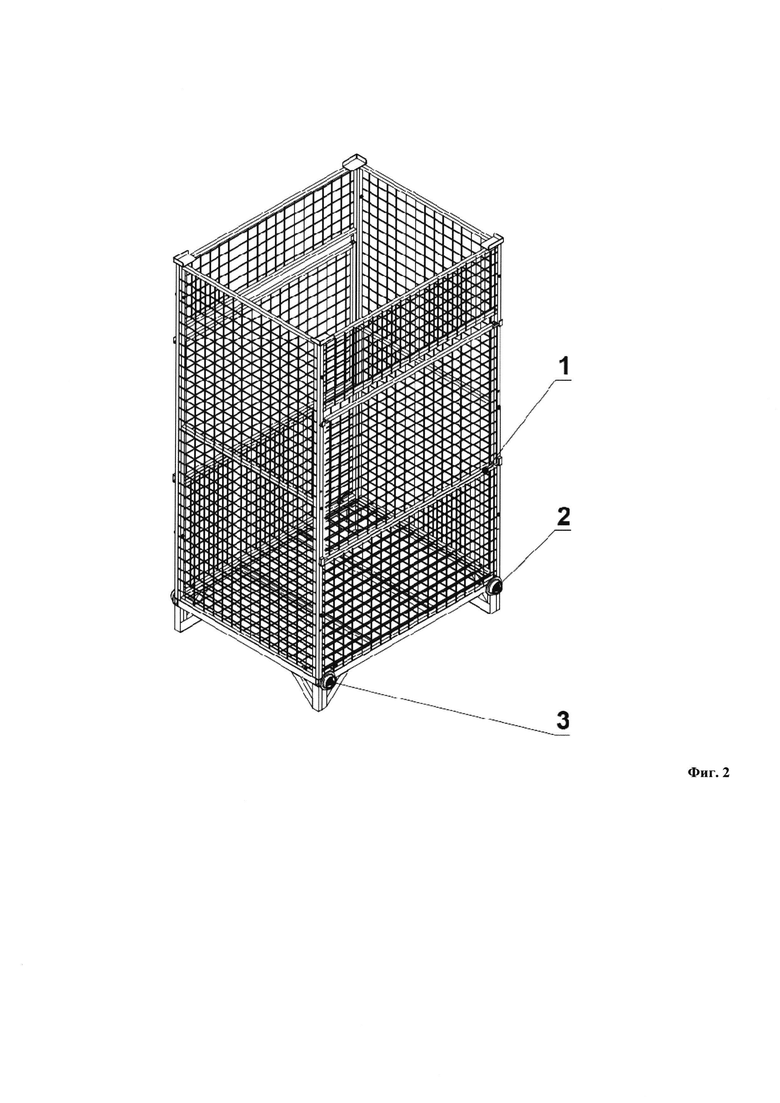
на фиг. 2 - контейнер,
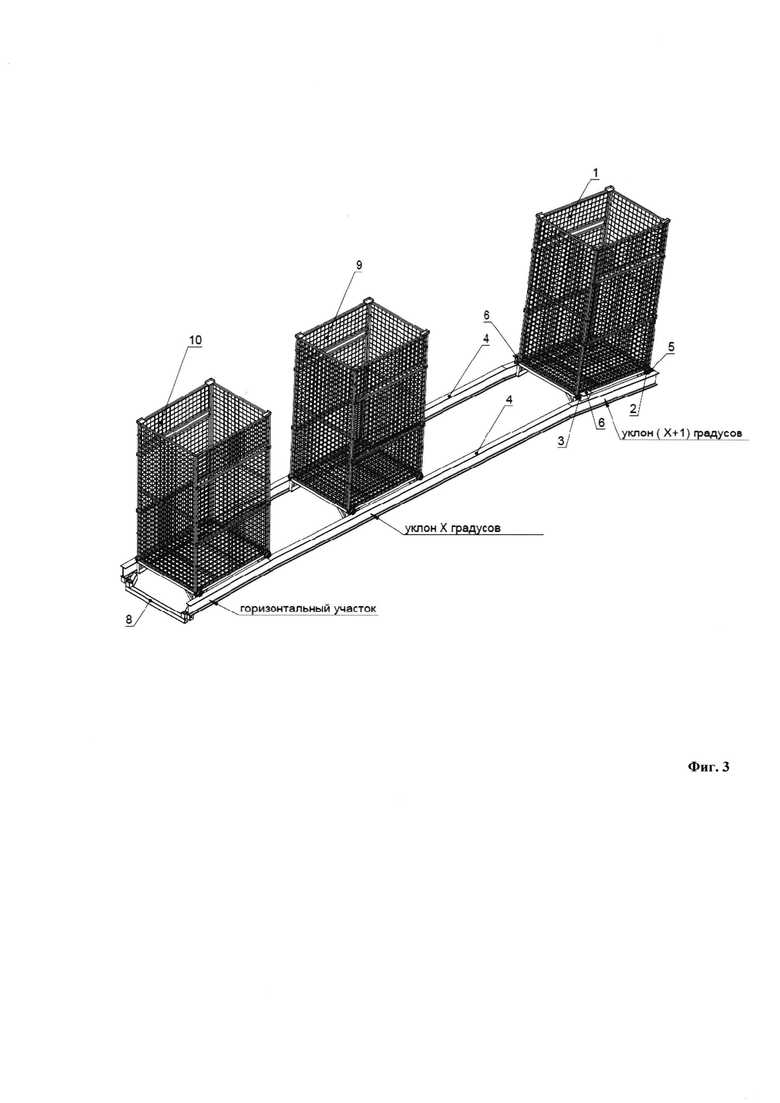
на фиг. 3 - один ряд хранения,
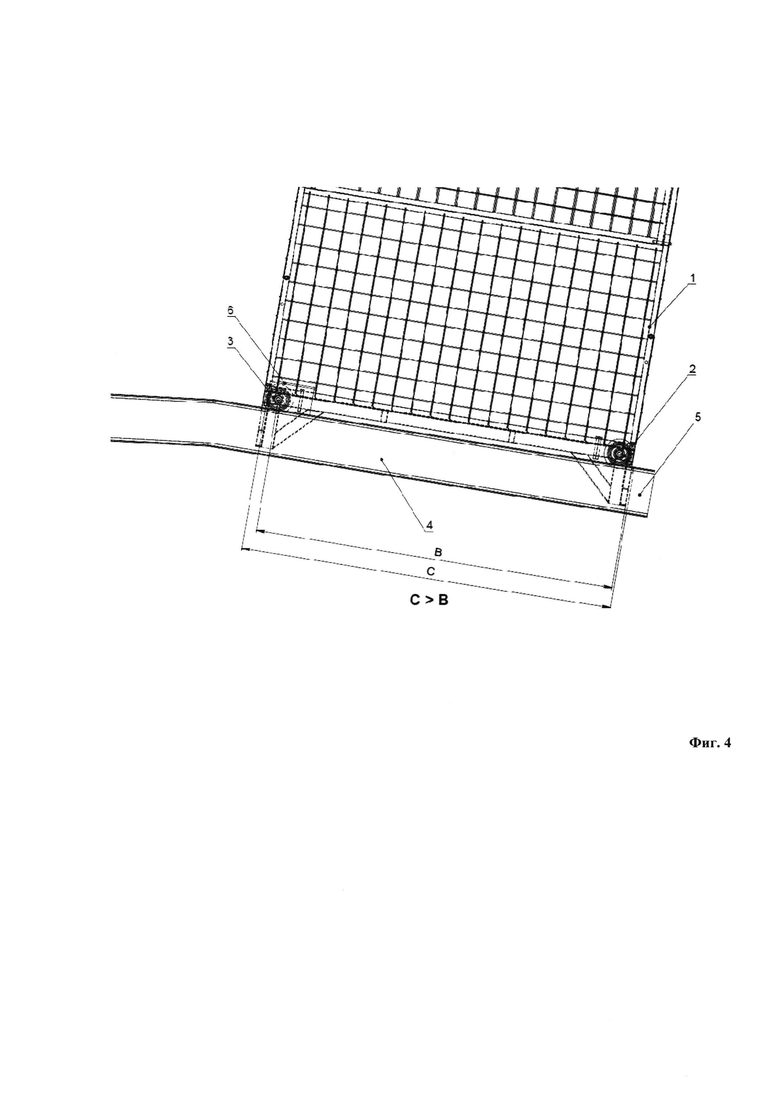
на фиг. 4 - тормозное устройство.
Позиции на чертежах обозначают:
1 - контейнер
2 - передний ролик контейнера
3 - задний ролик контейнера
4 - направляющие
5 - упругий упор
6 - фиксатор
7 - направляющие для пустых контейнеров
8 - предохранительное устройство храпового типа
9 - второй контейнер
10 - третий контейнер.
Система хранения состоит из контейнеров 1, снабженных роликами 2, 3 и неподвижного каркаса с параллельными наклонными направляющими 4, тормозными устройствами, представляющими собой комбинацию, состоящую из упругих упоров 5, закрепленных на концах направляющих 4 перпендикулярно направлению движения контейнеров 1 и фиксаторов 6, представляющих из себя плоские пластины, расположенные параллельно поверхности направляющих 4 над роликами 3 на расстоянии, превышающем диаметр ролика 3, причем максимальное расстояние от упора 5 до края фиксатора 6 должно быть не менее расстояния от плоскости передней стенки контейнера 1 до плоскости, параллельной ей и проходящей через ось дальнего по ходу ролика 3 контейнера 1. Часть направляющих 7 выполнена с уклоном в направлении, противоположном направлению основного уклона,
Направляющие 4 выполнены с дополнительным уклоном, который находится в пределах 1 градуса по отношению к основному углу уклона направляющих, и начинается на расстоянии от плоскости упора 5, не превышающем длину контейнера 1. Направляющие 4 выполнены с горизонтальным участком, который начинается от начала направляющей 4, и его длина превышает расстояние между осями переднего 2 и заднего 3 роликов контейнера 1.
Направляющие 4 снабжены предохранительными устройствами храпового типа 8, выполненными с возможностью пропускать контейнер при движении в прямом направлении и препятствовать движению в обратном направлении и расположенными в начале горизонтального участка.
Направляющие 4 могут располагаться в несколько ярусов по высоте в зависимости от конструктивных особенностей каркаса.
Работает система следующим образом:
Штучные изделия или материалы, предназначенные для хранения укладываются вовнутрь контейнера 1, который при помощи штабелера или другого грузоподъемного устройства устанавливаются на горизонтальный участок направляющих 4 таким образом, чтобы ролики 2 и 3 вступили во взаимодействие с поверхностью направляющих 4. При дальнейшем принудительном движении контейнер 1 взаимодействует с предохранительным устройством храпового типа 8, отклоняет его, продвигается далее вдоль направляющих 1 и выходит из взаимодействия. Предохранительное устройство 8 под действием собственного веса возвращается в исходное положение. Выбор ячейки хранения производится в зависимости от ассортимента загруженного изделия. Аналогичным образом производится установка второго контейнера 9. При этом второй контейнер 9 воздействует на первый контейнер 1 и продвигает его вперед вдоль по направляющим 4. При этом ролики 2 и 3 первого контейнера 1 въезжают на наклонный участок направляющих 4 и контейнер 1 под действием собственного веса начинает движение вдоль по направляющим 4 до контакта с упругими упорами 5. В момент касания контейнера 1 и упругого упора 5 ось задних роликов 3 контейнера 1 находится на расстоянии от плоскости упора 5 не превышающем расстояние от плоскости упора 5 до края фиксатора 6. При этом плоскость фиксатора расположена параллельно поверхности направляющих 4. Далее в процессе взаимодействия контейнера 1 и упоров 5 кинетическая энергия, накопленная в процессе движения контейнера 1 по направляющим 4, переходит в потенциальную энергию упругой деформации упоров 5. При этом контейнер 1 перемещается далее вдоль по направляющим и останавливается. В момент остановки контейнера 1 возникает крутящий момент, обусловленный тем, что центр тяжести контейнера 1 расположен выше линии взаимодействия контейнера 1 и упоров 5. При этом задний ролик 3 контейнера 1 вступает во взаимодействие с нижней поверхностью пластины фиксатора 6, и возникает сила противодействия крутящему моменту. Контейнер 1 надежно зафиксирован. При установке третьего контейнера 10 на направляющие второй контейнер 9 под действием собственного веса начинает движение вдоль по направляющим 4 до контакта с первым контейнером 1. Из-за того, что направляющие 4 выполнены с дополнительным уклоном, между задней стенкой первого контейнера 1 и передней стенкой второго контейнера 9 образуется небольшой острый угол, достаточный для гарантированного разделения контейнеров. Далее цикл повторяется до заполнения всей ячейки хранения (ряда). Остальные ячейки заполняются аналогично.
Для выгрузки контейнера 1 необходимо при помощи штабелера воздействовать на его переднюю стенку в направлении противоположном направлению движения контейнера при загрузке. При этом контейнер 1 принудительно перемещается и его задний ролик 3 выходит из взаимодействия с фиксатором 6. Затем контейнер 1 приподнимается вилами штабелера на высоту, достаточную для прохождения заднего ролика 3 выше пластины фиксатора 6 и выгружается. Выгрузка остальных контейнеров производится аналогично. Загрузка и выгрузка пустых контейнеров производится аналогичным образом на направляющие 7, направление уклона которых противоположно направлению уклона направляющих 4.
Источники информации.
1. Гравитационные стеллажи.
https://ru.wikipedia.org/wiki/%D0%93%D1%80%D0%B0%D0%B2%D0%B8%D1%82%D0%B0%D1%86%D0%B8%D0%BE%D0%BD%D0%BD%D1%8B%D0%B5_%D1%81%D1%82%D0%B5%D0%BB%D0%BB%D0%B0%D0%B6%D0%B8
2. A.C. №182051, B65G.
3. A.C. №766987, B65C 47/69.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОТДЕЛЕНИЯ ЛЕГКОЙ ФРАКЦИИ ИЗ ПНЕВМОТРАНСПОРТНОГО ПОТОКА СЫПУЧЕГО МАТЕРИАЛА | 2017 |
|
RU2701759C2 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ШТУЧНЫХ ПЕЧЕНЫХ ИЗДЕЛИЙ | 2005 |
|
RU2297145C2 |
| Устройство торможения на гравитационных стеллажах грузов | 1989 |
|
SU1684182A1 |
| СПАСАТЕЛЬНЫЙ ШКАФ | 2003 |
|
RU2242909C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПРУЖИННЫХ ЛАМЕЛЕЙ С ТРЕХПИЛЬНЫМ СТАНКОМ ДЛЯ РАСКРОЯ ГНУТО-ЛИСТОВЫХ МАТЕРИАЛОВ И МЕХАНИЗМОМ ПИЛЕНИЯ С ГЛУШИТЕЛЕМ ШУМА ДИСКОВОЙ ПИЛЫ | 2014 |
|
RU2563674C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ШТУЧНЫХ ГРУЗОВ | 1990 |
|
RU2094252C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2014 |
|
RU2589569C2 |
| Стеллаж | 1988 |
|
SU1632879A1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ВЫДАЧИ ТОВАРНЫХ ПРЕДМЕТОВ | 2018 |
|
RU2672936C1 |
| Механизированный стеллаж для хранения штучных грузов | 1984 |
|
SU1266799A1 |
Изобретение относится к транспортировке и хранению штучных грузов или материалов и может найти применение в любой отрасли производства. Система хранения штучных изделий состоит из контейнеров, снабженных роликами, неподвижного каркаса с параллельными наклонными направляющими, закрепленными под углом в направлении движения контейнеров, тормозных и предохранительных устройств. Ролики закреплены на боковых сторонах контейнеров с возможностью качения вдоль упомянутых плоских направляющих неподвижного каркаса. Тормозные устройства представляют собой комбинацию, состоящую из упругих упоров, закрепленных на концах направляющих перпендикулярно направлению движения контейнеров и фиксаторов, представляющих из себя плоские пластины, расположенные параллельно поверхности направляющих. Направляющие выполнены с горизонтальным участком, который начинается от начала направляющей, и его длина превышает расстояние между осями переднего и заднего роликов контейнера. При взаимодействии контейнера с упругим упором задний ролик контейнера вступает во взаимодействие с нижней поверхностью пластины фиксатора и возникает сила противодействия крутящему моменту. Изобретение обеспечивает повышение надежности, упрощение конструкции, увеличение полезного объема хранения, обеспечение надежной фиксации контейнера от опрокидывания в конечной точке направляющих и исключения вероятности повреждения роликов при ударе о неподвижный упор. 4 з.п. ф-лы, 4 ил.
1. Система хранения штучных изделий, состоящая из контейнеров, снабженных роликами, неподвижного каркаса с параллельными наклонными направляющими, закрепленными под углом в направлении движения контейнеров, тормозных и предохранительных устройств, при этом ролики закреплены на боковых сторонах контейнеров с возможностью качения вдоль упомянутых плоских направляющих неподвижного каркаса,
отличающаяся тем, что тормозные устройства представляют собой комбинацию, состоящую из упругих упоров, закрепленных на концах направляющих перпендикулярно направлению движения контейнеров и фиксаторов, представляющих из себя плоские пластины, расположенные параллельно поверхности направляющих на расстоянии, превышающем диаметр ролика с возможностью взаимодействия с пластиной заднего ролика контейнера при взаимодействии контейнера и упругих упоров.
2. Система хранения штучных изделий, по п. 1,
отличающаяся тем, что угол уклона направляющих не превышает 3 градуса.
3. Система хранения штучных изделий, по п. 1,
отличающаяся тем, что одни из направляющих выполнены с уклоном в направлении, противоположном направлению уклона остальных направляющих.
4. Система хранения штучных изделий, по п. 1,
отличающаяся тем, что направляющие выполнены с дополнительным уклоном, который находится в пределах 1 градуса по отношению к основному углу уклона направляющих и начинается на расстоянии от плоскости упора, не превышающем длины контейнера.
5. Система хранения штучных изделий, по п. 1,
отличающаяся тем, что направляющие каркаса выполнены с горизонтальным участком, который начинается от начала направляющей, и его длина превышает расстояние между осями переднего и заднего роликов контейнера.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Устройство торможения на гравитационных стеллажах грузов | 1989 |
|
SU1684182A1 |
| Тормозное устройство для грузовых тележек | 1986 |
|
SU1344668A1 |
| US 9446905 B2, 20.09.2016 | |||
| US 4582188 A1, 15.04.1986. | |||

