33 да 3 32 23
3 / / /
-ин---ь
(Л
ю
О) О5
со ;о
фиг. 5
Изобретение относится к оборудованию складов в частности к элеваторным складам а именно к механизированным стеллажам внутри которых грузы могут перемещаться по замкнутому контуру.
Цель изобретения - повышение надежности путем обеспечения гарантированного захвата поддона.
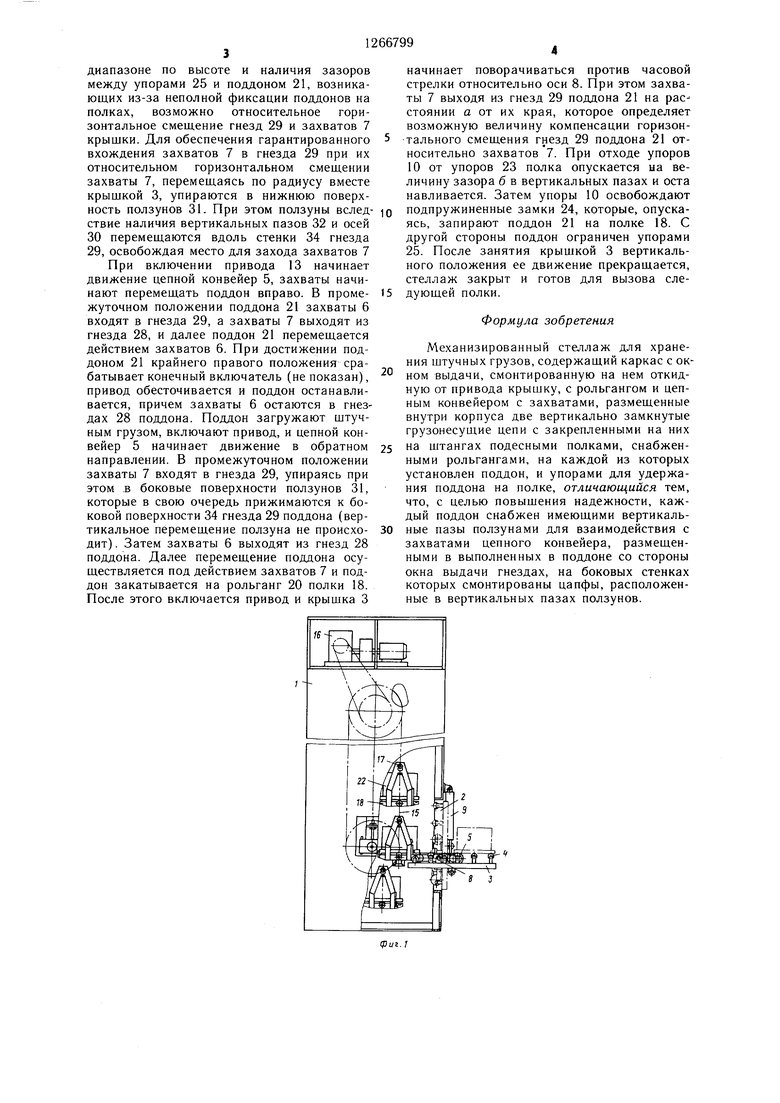
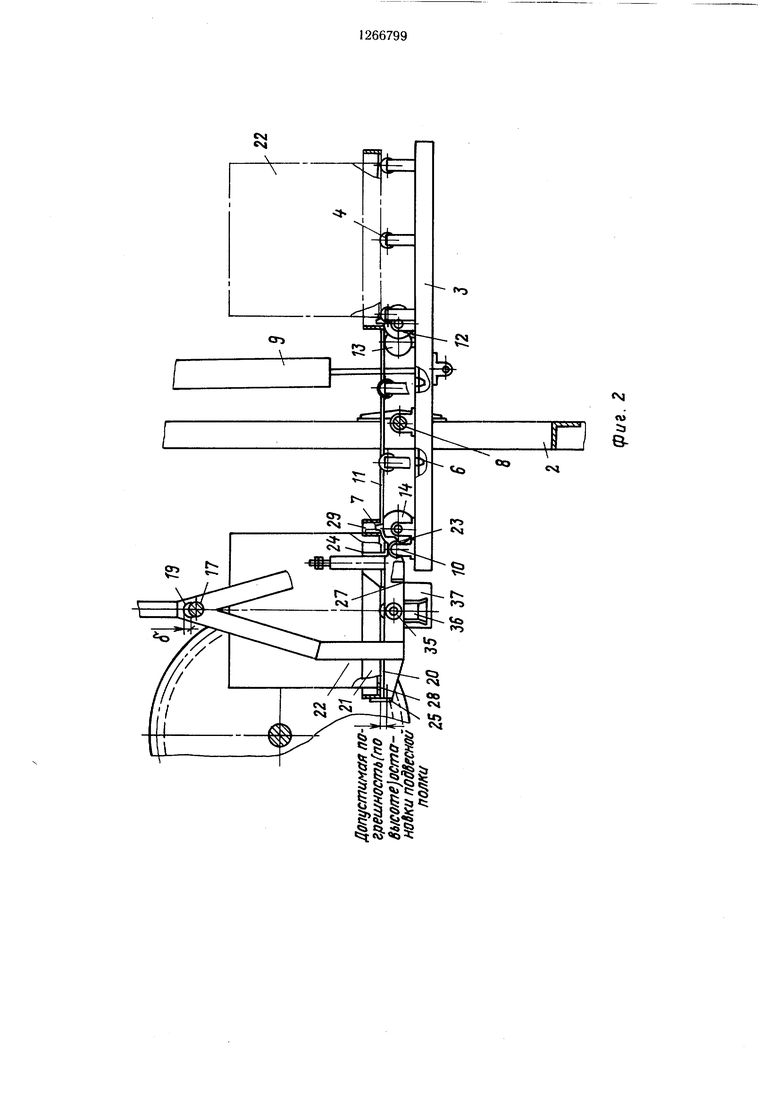
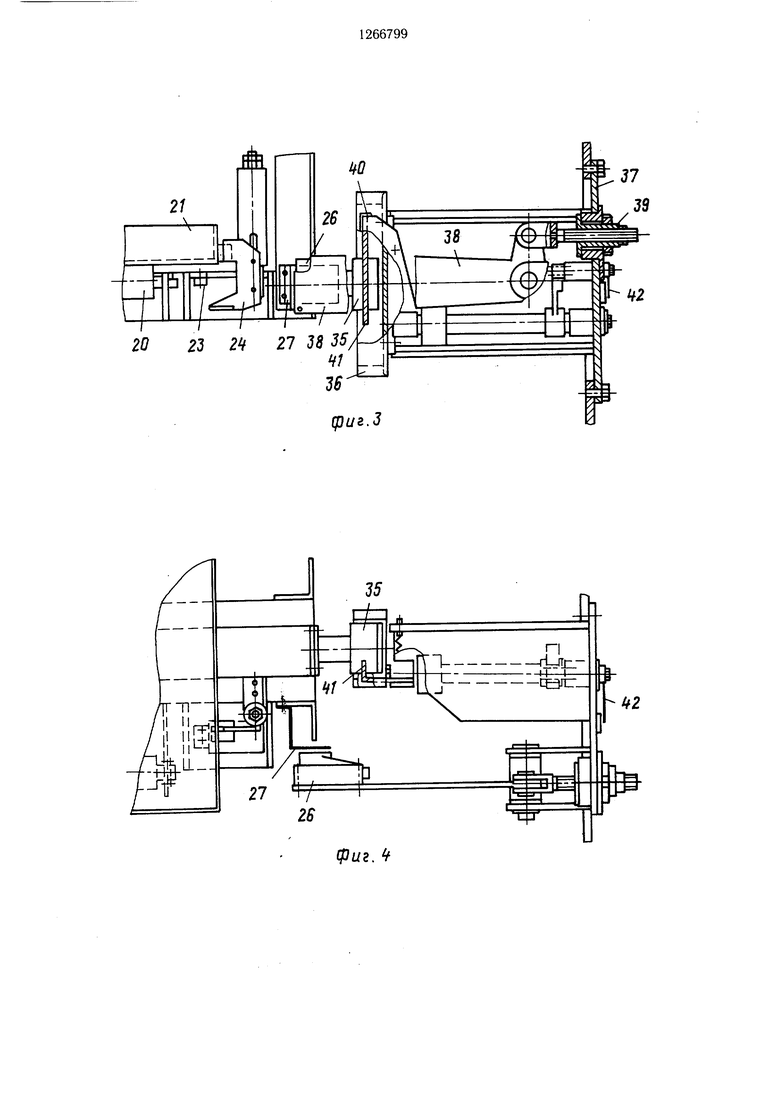
На фиг. 1 схематично изображен механизроваиный стеллаж, общий вид; на фиг. 2 механизм загрузки-вшг;рузки; на фиг. 3 - узел контроля и регулировки уровня остановки подвесной полки; на фиг. 4 - то же, вид сверху; на фиг. 5 - взаимодействие захватов цепных контуров механизма загрузки-выгрузки с поддоном подвесной полки в момент поворота откидной крышки при разгрузке; на фиг. 6 - то же при обратном: движении поддона на подвеску.
Механизированный стеллаж содержит каркас 1 с окном 2 выдачи груза, против которого установлена откидная крышка 3 с рольгангом 4. Крышка 3 снабжена цепными конвейерами с захватами 6 и 7 и установлена с возможностью поворота вокруг осей 8 посредством механизма откидывания, выполненного в виде пневмоцилиндра 9, одним концом закрепленного на корпусе стеллажа, а другим концом, т.е. щтоком, шарнирно связанного с крышкой 3. На нижней внутренней части крышки выполнены упоры 10. Цепной конвейер 5 выполнен из двух вертикально замкнутых цепей 11, двух приводных звездочек 12, кинематически связанных с приводом 13 и двух натяжных звездочек 14. Внутри корпуса размещены две вертикально замкнутые параллельные одна другой грузонесущие цепи 15 с приводом 16 и закрепленными на щтангах 17 подвесными полками 18 в вертикальных пазах 19. Полки оснащены рольгангом 20, на котором устанавливается поддон 21 со штучными грузами 22 и упорами 23. Для предотвращения смещения поддона при движении на полке выполнены подпружиненные замки 24 и упоры 25. Для взаимодействия с конечным выключателем 26 останова полок на полке выполнены шунты 27 и гнезда 28 и 29 для взаимодействия с захватами 6 и 7 цепного конвейера 5 крышки 3. При этом гнезда 29 оснащены свободно висящими на осях 30 ползунами 31 с вертикальными пазами 32 для обеспечения возможности вертикального перемещения ползунов 31 относительно поддона 21. Плоскости 33 ползунов 31 расположены параллельно стенкам 34 гнезд 29 для обеспечения возможности плоскопараллельного вертикального перемещения (без заклинивания) ползунов. С боковых сторон полок 18 имеются ролики 35, выполненные с возможностью взаимодействия с направляющими 36, расположенными внутри корпуса 1 на боковых его стенках и закрепленными на кронштейнах 37. На одном из кронштейнов
37 шарнирно установлен двуплечий рычаг 38, на одном конце которого установлен конечный выключатель 26, другое плечо шарнирно соединено с винтовой парой 39. В боковой стенке направляющей 36 выполнена прорезь 40, в которой установлен профилированный рычаг 41, кинематически вязанный со стрелочным указателем 42.
Элеваторный стеллаж работает следующим образом.
Включается привод 16, и цепи 15 с полками 18 начинают движение. Адресователем (не показан) вызывается нужная полка к окну 2 выдачи. При подходе полки 18 в зону остановки ее ролики 35 входят в направляющие 36, ориентирующие полку по горизон5 тали. Один из роликов 35, входя в направляющую 36, отклоняет профилированный рычаг 41, а вместе с ним и кинематически связанный с ним стрелочный указатель 42. Нулевая отметка шкалы стрелочного указателя 42 соответствует абсолютному совпадению уровней по вертикали рольганга 20 подвесной полки 18 и рольганга 4 крыщки 3. Отклонение стрелочного указателя 42 от нулевой отметки шкалы указывает величину вертикального отклонения уровня рольганга 20
5 подвесной полки 18 от уровня рольганга 4 крышки 3. Одновременно с взаимодействием ролика 35 с профилированным рычагом 41 шунт 27 полки, проходя мимо конечного выключателя 26, замыкает его. Электродвигатель привода 16 обесточивается, и полка
0 18 останавливается в заданном допустимом диапазоне высот. Уровень остановки полки 18 контролируется по стрелочному указателю 42. При осуществлении коррекции уровня остановки подвесной полки производится регулировка положения конечного выключателя 26 посредством винтовой пары 39.
Выравнивание уровней рольгангов 20 и 4, производится при повороте крышки 3 по часовой стрелке, т.е. при открывании окна 2 выдачи. При включении пневмоцилиндра 9 крышка поворачивается по часовой стрелке относительно осей 8, открывается окно выдачи. При повороте крышка 3 своими упорами 10 подхватывает подпружиненные замки 24, поднимает их, освобождая поддон 21. При далнейшем движении крышки 3
5 упоры 10, нажимая на упоры 23 полки 18, приподнимают ее. Одновременно захваты 7 входят в гнезда 29 поддона. Захваты 6 в это время находятся на нижних ветвях цепного конвейера. Штанга 17 остается неподвижной, а полка 18 благодаря вертикальным пазам
0 19 и направляющим 39, взаимодействующим с роликами 35, перемешается вверх. При достижении рольгангом 4 горизонтального уровня срабатывает конечный выключатель (не показан), привод обесточивается, совместное движение крышки 3 и подвес
ной полки 18 прекращается. Рольганги 4 и 20 устанавливаются на одном уровне. Вслед ствие остановки подвесной полки в заданном 3 диапазоне по высоте и наличия зазоров между упорами 25 и поддоном 21, возникающих из-за неполной фиксации поддонов на полках, возможно относительное горизонтальное смещение гнезд 29 и захватов 7 крышки. Для обеспечения гарантированного вхождения захватов 7 в гнезда 29 при их относительном горизонтальном смещении захваты 7, перемещаясь по радиусу вместе крыщкой 3, упираются в нижнюю поверхность ползунов 31. При этом ползуны вследствие наличия вертикальных пазов 32 и осей 30 перемещаются вдоль стенки 34 гнезда 29, освобождая место для захода захватов 7 При включении привода 13 начинает движение цепной конвейер 5, захваты начинают перемещать поддон вправо. В промежуточном положении поддона 21 захваты 6 входят в гнезда 29, а захваты 7 выходят из гнезда 28, и далее поддон 21 перемещается действием захватов 6. При достижении поддоном 21 крайнего правого положения срабатывает конечный включатель (не показан), привод обесточивается и поддон останавливается, причем захваты 6 остаются в гнездах 28 поддона. Поддон загружают штучным грузом, включают привод, и цепной конвейер 5 начинает движение в обратном направлении. В промежуточном положении захваты 7 входят в гнезда 29, упираясь при этом .в боковые поверхности ползунов 31, которые в свою очередь прижимаются к боковой поверхности 34 гнезда 29 поддона (вертикальное перемещение ползуна не происходит) . Затем захваты 6 выходят из гнезд 28 поддона. Далее перемещение поддона осуществляется под действием захватов 7 и поддон закатывается на рольганг 20 полки 18. После этого включается привод и крышка 3 начинает поворачиваться против часовой стрелки относительно оси 8. При этом захваты 7 выходя из гнезд 29 поддона 21 на рас стоянии а от их края, которое определяет возможную величину компенсации горизонтального смещения гнезд 29 поддона 21 относительно захватов 7. При отходе упоров 10 от упоров 23 полка опускается на величину зазора б в вертикальных пазах и оста навливается. Затем упоры 10 освобождают подпружиненные замки 24, которые, опуска ясь, запирают поддон 21 на полке 18. С другой стороны поддон ограничен упорами 25. После занятия крышкой 3 вертикального положения ее движение прекращается, стеллаж закрыт и готов для вызова следующей полки. Формула зобретения Механизированный стеллаж для хранения штучных грузов, содержащий каркас с окном выдачи, смонтированную на нем откидную от привода крышку, с рольгангом и цепным конвейером с захватами, размещенные внутри корпуса две вертикально замкнутые грузонесущие цепи с закрепленными на них на штангах подесными полками, снабженными рольгангами, на каждой из которых установлен поддон, и упорами для удержания поддона на полке, отличающийся тем, что, с целью повышения надежности, каждый поддон снабжен имеющими вертикальные пазы ползунами для взаимодействия с захватами цепного конвейера, размещенными в выполненных в поддоне со стороны окна выдачи гнездах, на боковых стенках которых смонтированы цапфы, расположенные в вертикальных пазах ползунов.
fv) u
3
Q
00
CSJ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизированный стелаж для хранения штучных грузов | 1973 |
|
SU622718A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Склад штучных грузов | 1980 |
|
SU992345A1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| ХНННЕС-КА БИБЛИОТЕКА | 1971 |
|
SU304938A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
| Поточная линия для нанесения покрытий на изделия | 1991 |
|
SU1811913A1 |
| Устройство для укладки штучных предметов в тару | 1977 |
|
SU738948A1 |
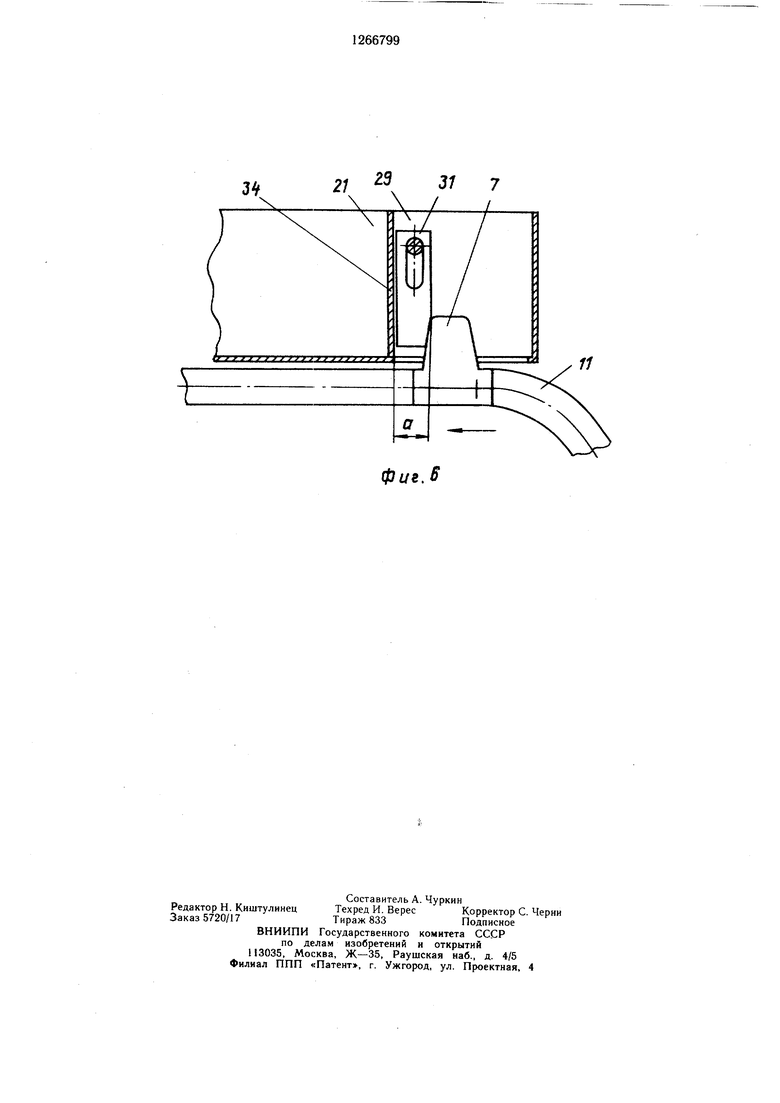
Изобретение относится к элеваторным стеллажам и позволяет повысить их надежность. Каждый поддон 21 ползунами (П) 31, которые связаны посредством выполненных в них вертикальных пазов 32 и осей 30 с боковыми стенками гнезд 29. При заталкивании поддона 21 захваты 7 цепного конвейера взаимодействуют с вертикальными стенками П 31, надежно перемещая поддон 21 на полку стеллажа. При неточном размещении поддона 21 на полке стеллажа захваты 7 приподнимают П 31 и входят в надежное взаимодействие с гнездами 29. 6 ил.
фиг. Б
| Механизированный стелаж для хранения штучных грузов | 1973 |
|
SU622718A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
