Изобретение относится к способам прицеливания при стрельбе из пушки самолета-истребителя по маневрирующей воздушной цели.
Известны способы прицеливания с зависимым управлением визирной линией, которые используют гироскоп, баллистический вычислитель, датчики высоты, воздушной скорости, углов атаки и скольжения (см., например, Р.В. Мубаракшин и др. «Прицельные системы стрельбы». Издание ВВИА им. Жуковского, 1973). Недостатком данных способов является необходимость синхронизировать собственное движение носителя с движением воздушной цели. Это значит, что летчик для определения угловых поправок стрельбы достаточно длительное время должен сопровождать цель визирным устройством, повторяя ее маневры.
Известны также способы прицеливания с независимым управлением визирной линией (см., например, «Прицельно-навигационный комплекс ПрНК-23». Техническое описание под ред. А.К. Ганулича. Издание ВВИА им. Жуковского, 1975).
На современных самолетах используют способ прицеливания с независимым управлением визирной линией «НЕСИНХРОННАЯ СТРЕЛЬБА» (см., например, «Самолет Су-27К». Руководство по летной эксплуатации. Издание ВВИА им. Жуковского, 2004), заключающийся в том, что выполняют захват и автосопровождение визуально видимой цели ОЛС, измеряют угловые координаты воздушной цели и дальность до нее, индицируют визирное кольцо, определяющее направление на сопровождаемую цель, рассчитывают углы упреждения и индицируют подвижное перекрестие, определяющее положение цели, потребное для попадания в нее снаряда, маневром самолета совмещают подвижное перекрестие с визирным кольцом, при совмещении подвижного перекрестия с визирным кольцом и достижении эффективной дальности стрельбы открывают огонь.
Данный способ требует углового сопровождения воздушной цели и измерения дальности до нее (так называемое «полное приборное обеспечение»).
При отсутствии замеров дальности (так называемое «неполное приборное обеспечение»), используется способ прицеливания «ПРОГНО3-ДОРОЖКА», выбранный за прототип (см., например, «Самолет Су-27К». Руководство по летной эксплуатации. Издание ВВИА им. Жуковского, 2004). Данный способ заключается в том, что по силуэту определяют тип цели и вводят размах ее крыльев (БАЗУ ЦЕЛИ) в вычислитель, вычисляют прогнозируемую трассу снарядов, относительно которой вычисляют и индицируют две кривые линии ДОРОЖКИ - прогнозируемое положение концов крыльев цели, удерживая цель в поле зрения визира маневром вводят самолет в плоскость атаки, вписывают визуально видимую цель в ДОРОЖКУ так, чтобы концы крыльев цели касались кривых линий ДОРОЖКИ и открывают огонь.
Способ «ПРОГНО3-ДОРОЖКА» обеспечивает поражение цели при заградительно-сопроводительной стрельбе. Поэтому стрельбу необходимо открывать несколько ранее вписывания концов крыльев цели в воронку и заканчивать после прохождения момента вписывания.
В ходе атаки возможна ситуация, когда цель сопровождается ОЛС, но замеры дальности отсутствуют. Способ «ПРОГНО3-ДОРОЖКА» не использует измеренные угловые координаты для повышения точности стрельбы при сопровождении цели ОЛС. Кроме того, он не позволяет автоматизировать процесс прицеливания.
Технический результат, достигаемый изобретением, заключается в повышении точности прицеливания при «неполном приборном обеспечении».
Указанный результат достигается путем вычисления и индикации ошибок прицеливания и частичной автоматизации управления самолетом.
Для этого определяют тип цели и вводят размах ее крыльев в бортовой вычислитель. Вычисляют прогнозируемую трассу снарядов. Сигнал прогнозируемой трассы снарядов индицируют на ИЛС. Выполняют захват и автосопровождение визуально видимой цели бортовой информационно-измерительной системой, например, ОЛС. Измеряют угловые координаты воздушной цели и индицируют на ИЛС визирное кольцо, определяющее направление на сопровождаемую цель. Задают диаметр визирного кольца, равным угловому размеру размаха крыльев цели для той дальности, для которой продольная угловая координата индицируемой трассы снарядов равна текущей продольной угловой координате сопровождаемой цели. При этом летчик может наблюдать боковую ошибку прицеливания как отклонение влево или вправо визирного кольца от индицируемой трассы снарядов. Кроме того, он может косвенно определить продольную ошибку прицеливания: если видимая цель целиком находится внутри обрамляющего ее визирного кольца, значит, потребное для попадания снаряда положение цели на ИЛС находится ниже, если же видимая цель выходит за пределы визирного кольца, то - выше. Наконец, если концы крыльев визуально видимой цели касаются обрамляющего ее визирного кольца, значит, продольная ошибка прицеливания равна нулю.
Затем для точного прицеливания маневром самолета компенсируют боковую ошибку, перемещая видимую цель и совпадающее с ней визирное кольцо на индицируемую трассу снарядов. После этого выравнивают собственный крен с креном визуально видимой цели и перемещают ее вдоль индицируемой трассы снарядов, добиваясь касания крыльями цели обрамляющего ее визирного кольца. При касании открывают огонь. Для заградительно-сопроводительной стрельбы огонь открывают несколько ранее вписывания концов крыльев цели в визирное кольцо и заканчивают после прохождения момента вписывания.
Одновременно формируют боковую ошибку прицеливания в виде отклонения текущей боковой угловой координаты сопровождаемой цели от прогнозируемой трассы снарядов, формируют сигнал управления самолетом, пропорциональный боковой ошибке прицеливания, и суммируют его с сигналом ручного управления самолетом. Таким образом, обеспечивают совмещенное управление самолетом для облегчения точного прицеливания по интенсивно маневрирующей цели.
Сущность предлагаемого способа поясняется чертежами.
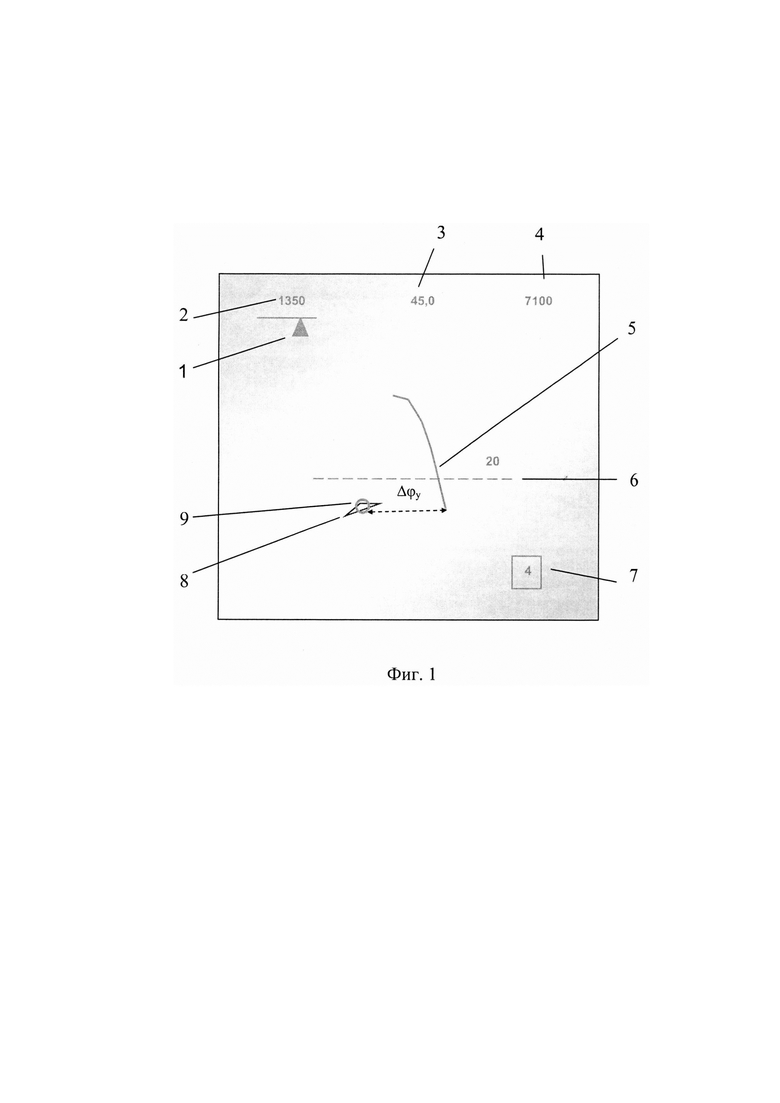
На фиг. 1 показана индикация на ИЛС при наличии ошибок прицеливания.
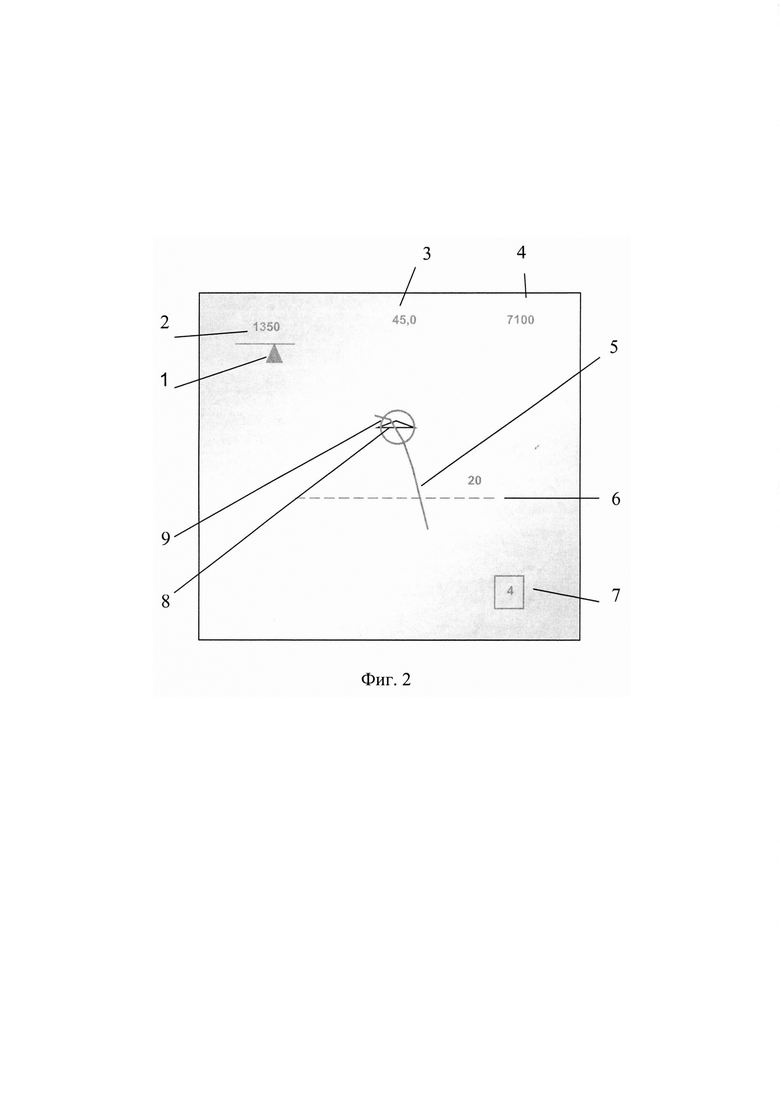
На фиг. 2 показана индикация на ИЛС при точном прицеливании.
На фиг. 1, 2 обозначено:
1 - Тенденция изменения скорости;
2 - Скорость текущая;
3 - База цели (размах крыльев цели в метрах);
4 - Высота барометрическая текущая;
5 - Прогнозируемая трасса снарядов;
6 - Линия тангажа с цифровым счетчиком текущего значения;
7 - Боевой комплект снарядов;
8 - Визуально видимая воздушная цель;
9 - Визирное кольцо.
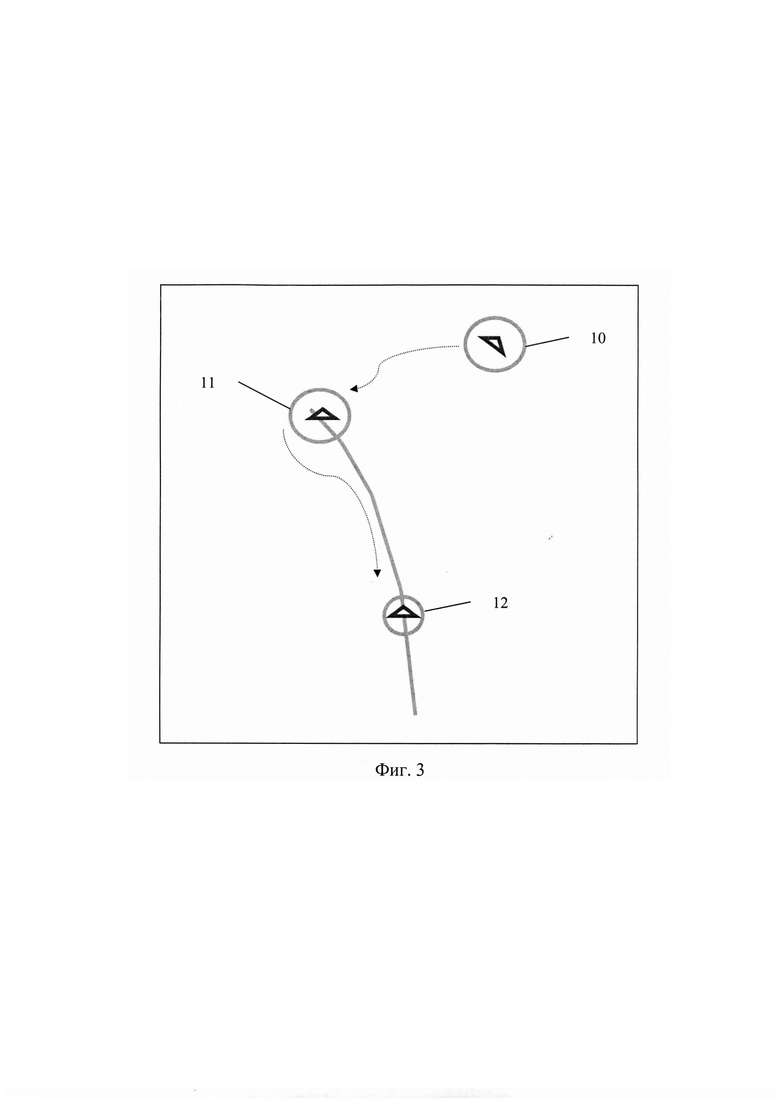
Фиг. 3 иллюстрирует процесс прицеливания. Здесь показано:
10 - Положение визирного кольца на ИЛС в начале прицеливания.
11 - Положение визирного кольца на ИЛС при его совмещении с трассой снарядов.
12 - Положение визирного кольца на ИЛС при точном прицеливании.
В соответствии с предлагаемым способом прицеливание и стрельба выполняется следующим образом.
При атаке визуально видимой цели (поз. 8 на фиг. 1, 2) определяют ее тип и вводят размах ее крыльев Б в вычислитель, после чего индицируют его на ИЛС (поз. 3 на фиг. 1, 2).
Вычисляют прогнозируемую трассу снарядов и индицируют ее на ИЛС в виде ломаной линии, состоящей из n отрезков (поз. 5 на фиг. 1, 2). Каждый узел этой ломаной линии определяют продольным  и боковым
и боковым  потребным пеленгом, нахождение на которых визуально видимой цели обеспечивает попадание в нее снаряда. Эти пеленги вычисляют для дискретного набора дальностей эффективной стрельбы Di:
потребным пеленгом, нахождение на которых визуально видимой цели обеспечивает попадание в нее снаряда. Эти пеленги вычисляют для дискретного набора дальностей эффективной стрельбы Di:

Сами функции fy,z зависят от текущих параметров полета, измеряемых датчиками самолета:
- воздушной скорости носителя V,
- углов атаки и скольжения α, β
- углов крена и тангажа γ, υ.
Кроме того, функции fy,z зависят от баллистики снаряда, а также от скорости и ускорения цели, которые определяют из уравнения:
 ,
,
где:
 - вектора скорости и ускорения цели;
- вектора скорости и ускорения цели;
 - вектор угловой скорости вращения луча визирования;
- вектор угловой скорости вращения луча визирования;
V - вектор скорости истребителя.
Уравнение основано на допущении, что вектор  близок к вектору
близок к вектору  (угловой скорости вращения цели) и предполагает постоянство проекций V на оси лучевой системы координат. Эти предположения выполняются при круговом маневре цели и хорошем прицеливании.
(угловой скорости вращения цели) и предполагает постоянство проекций V на оси лучевой системы координат. Эти предположения выполняются при круговом маневре цели и хорошем прицеливании.
Выполняют захват и автосопровождение визуально видимой цели бортовой информационно-измерительной системой, например, ОЛС и измеряют угловые координаты воздушной цели ϕz и ϕу. Индицируют на ИЛС визирное кольцо, определяющее направление на сопровождаемую цель. Для этого для дискретного набора дальностей Di…Dn находят дальность DR, для которой  равно ϕz:
равно ϕz:
Задают угловой диаметр визирного кольца d, равным угловому размеру размаха крыльев цели для той дальности, для которой продольная угловая координата индицируемой трассы снарядов равна текущей продольной угловой координате сопровождаемой цели:
Затем маневром самолета перемещают видимую цель и совпадающее с ней визирное кольцо на индицируемую трассу снарядов (из положения 10 в положение 11 на фиг. 3). После этого выравнивают собственный крен с креном визуально видимой цели и перемещают ее вдоль индицируемой трассы снарядов, добиваясь касания крыльями цели обрамляющего ее визирного кольца. При касании (положение 12 на фиг. 3) открывают огонь.
Кроме того, в процессе прицеливания формируют боковую ошибку прицеливания в виде отклонения текущей боковой угловой координаты сопровождаемой цели от прогнозируемой трассы снарядов, формируют сигнал управления самолетом, пропорциональный боковой ошибке прицеливания, и суммируют его с сигналом ручного управления, обеспечивая, таким образом, совмещенное управление самолетом.
Использование предлагаемого способа позволяет частично автоматизировать процесс прицеливания. «Частично» - означает, что боковую ошибку прицеливания компенсируют автоматически, удерживая визирное кольцо и совпадающую с ним визуальную цель на прогнозируемой трассе снарядов, а продольную ошибку прицеливания устраняет летчик, с помощью ручного управления «протягивая» визирное кольцо и цель вдоль прогнозируемой трассы снарядов. Это позволяет облегчить процесс прицеливания и повысить точность стрельбы при угловом сопровождении маневрирующей воздушной цели и отсутствии замеров дальности до нее.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прицеливания при стрельбе из пушки по маневрирующей воздушной цели | 2020 |
|
RU2751437C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРИЦЕЛИВАНИЯ ПО ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2016 |
|
RU2629130C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ | 2011 |
|
RU2498192C2 |
| СПОСОБ ЗАЩИТЫ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ОТ УПРАВЛЯЕМЫХ РАКЕТ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2280836C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ВОЗДУШНОЙ ЦЕЛИ ПО ЕЕ УСТАНОВЛЕННОЙ СКОРОСТИ | 2013 |
|
RU2558407C2 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| ПРИЦЕЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОГНЕМ КОРАБЕЛЬНОЙ МАЛОКАЛИБЕРНОЙ АРТУСТАНОВКИ | 2008 |
|
RU2368859C1 |
Изобретение относится к способам прицеливания при стрельбе из пушки самолета-истребителя по маневрирующей воздушной цели. Для прицеливания определяют тип цели (8), вводят размах ее крыльев (3) в вычислитель, вычисляют прогнозируемую трассу снарядов (5). Сигнал прогнозируемой трассы снарядов (5) выводят на индикацию, выполняют захват и автосопровождение визуально видимой цели (8), измеряют угловые координаты воздушной цели (8) и индицируют визирное кольцо (9), определяющее направление на сопровождаемую цель (8). Задают диаметр визирного кольца (9), равным угловому размеру размаха крыльев (3) цели (8) для той дальности, для которой продольная координата индицируемой трассы снарядов (5) равна текущей продольной угловой координате сопровождаемой цели (8). Маневром самолета перемещают видимую цель (8) и визирное кольцо (9) по индицируемой прогнозируемой трассе снарядов (5), при касании концов крыльев цели (8) обрамляющего визирного кольца (9) открывают огонь. При этом формируют боковую ошибку прицеливания в виде отклонения текущей боковой угловой координаты сопровождаемой цели (8) от прогнозируемой трассы снарядов (5), формируют сигнал управления самолетом, пропорциональный боковой ошибке прицеливания, и суммируют его с сигналом ручного управления самолетом. Обеспечивается повышение точности прицеливания при угловом сопровождении маневрирующей воздушной цели и отсутствии замеров дальности до нее за счет частичной автоматизации управления самолетом. 1 з.п. ф-лы, 3 ил.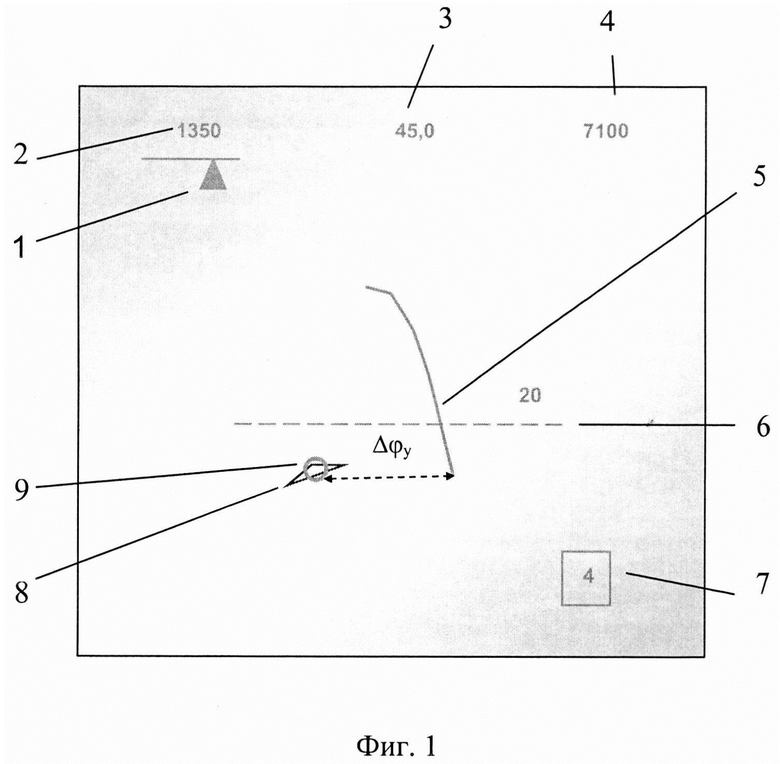
1. Способ прицеливания при стрельбе из пушки по воздушной цели, заключающийся в том, что определяют тип цели и вводят размах ее крыльев в вычислитель, вычисляют прогнозируемую трассу снарядов, отличающийся тем, что сигнал прогнозируемой трассы снарядов выводят на индикацию, выполняют захват и автосопровождение визуально видимой цели, измеряют угловые координаты воздушной цели и индицируют визирное кольцо, определяющее направление на сопровождаемую цель, причем задают диаметр визирного кольца, равным угловому размеру размаха крыльев цели для той дальности, для которой продольная координата индицируемой трассы снарядов равна текущей продольной угловой координате сопровождаемой цели, маневром самолета перемещают видимую цель и визирное кольцо по индицируемой прогнозируемой трассе снарядов, при касании концов крыльев цели обрамляющего визирного кольца открывают огонь.
2. Способ по п. 1, отличающийся тем, что формируют боковую ошибку прицеливания в виде отклонения текущей боковой угловой координаты сопровождаемой цели от прогнозируемой трассы снарядов, формируют сигнал управления самолетом, пропорциональный боковой ошибке прицеливания, и суммируют его с сигналом ручного управления самолетом.
| Устройство для резки на столбики цельно бланшированных картофеля и овощей | 1953 |
|
SU97823A1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| АВТОТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2542863C1 |
| US 4312262 A, 26.01.1982. | |||

