Изобретение относится к информационно-измерительным комплексам и системам управления боевыми самолетами и вертолетами.
Известен ряд методически различающихся способов прицеливания. При этом каждый из них при применении неуправляемых авиационных средств поражения (АСП), как правило, требует выполнения 2-х обязательных этапов:
- этапа ближнего наведения, при котором имеющиеся средства наведения обеспечивают вывод атакующего объекта в область аппаратного, либо визуального контакта с целью;
- этапа прицеливания, на котором осуществляется измерение и расчет параметров движения цели, вычисление поправок на стрельбу и их отработка путем целенаправленного пилотирования объектом.
При наличии на объекте эффективных средств определения параметров движения цели и средств ближнего наведения оба этих этапа могут рассматриваться, как единый процесс прицеливания.
Важным аспектом прицеливания является учет движения цели.
Радикальным методом решения этого вопроса является автоматизация процесса сопровождения цели с измерением ее параметров, их идентификацией и последующей экстраполяцией, либо с применением иных методов, которые эффективно заменяют ее.
Для полноты анализа приведем краткую справку о наиболее распространенных способах прицеливания.
Основные из них представлены в учебном пособии В.Г. Гришутина «Лекции по авиационным прицельным системам стрельбы», КВВАИУ, Киев, 1980 г. [1]. Приведем их в том порядке, в котором они представлены в [1]:
- глазомерный способ прицеливания (с. 324-326);
- способ прицеливания «навскидку», основанный на ускоренном расчете траектории движения снаряда/ракеты с отображением ее на индикаторе на лобовом стекле (ИЛС) в проекции на картинную плоскость, ортогональную линии визирования (ЛВ) цели (с. 326-327); прицеливание указанным методом заключается в совмещении траектории снаряда с текущим положением цели, при этом управление атакующим объектом должно быть таким, чтобы движение отображаемой на ИЛС цели происходило вдоль траектории снаряда/ракеты; стрельба открывается при подлете цели к метке дальности разрешенной стрельбы, расположенной на траектории снаряда;
- способ прицеливания, основанный на последовательном уточнении данных о движении цели, суть которого заключается в том, что при дефиците времени на качественное прицеливание целесообразно ограничиваться одним или двумя грубыми приближениями, руководствуясь принципом «лучше иметь приближенное решение, чем не иметь никакого» (с. 328).
Особое место в этом ряду занимает способ, использование которого предполагает выполнение следующих операций (с. 352-354).
При вхождении цели в зону действия бортовых средств обнаружения, последние выдают информацию о положении цели на обзорный индикатор.
Летчик по индикатору, либо по визуально наблюдаемой цели пилотирует самолет так, чтобы вывести его в исходное для атаки положение. При этом бортовые средства сопровождения захватывают цель, после чего начинается 1-й этап процедуры прицеливания, заключающийся в определении относительных координат местоположения цели и параметров ее движения. Определив все воздушно-скоростные параметры движения цели и располагая аналогичной информацией о движении собственного самолета, вычислитель прицельной системы определяет суммарные поправки на стрельбу и выдает их в виде подвижной прицельной марки (ППМ) на индикатор летчика. После чего, летчик пилотирует самолет так, чтобы совместить НИМ с целью. В момент наилучшего совмещения ППМ с целью нажимается боевая кнопка (БК) и осуществляется прицельная стрельба.
Приведенный способ прицеливания и прицельной сопроводительной стрельбы является наиболее приемлемым для синтеза на его основе автоматической процедуры прицеливания при применении неуправляемых АСП по подвижным наземным целям.
И исключительно только по этой причине далее будем рассматривать его в качестве прототипа.
Формализуя приведенное выше описание, излагая его в терминах и с акцентом на физическую суть выполняемых при его реализации операций, приведем его в следующем виде.
Способ прицеливания по подвижной наземной цели, основанный на реализации процедуры привязки к цели с определением ее относительного местоположения и параметров движения, для чего в одном из режимов углового сопровождения цели инициируют измерение дальности до нее и по дискретно производимым измерениям текущих углов ϕy, ϕz визирования цели и ограниченному во времени (не более 3 с), измеряемому лазерным дальномером (ЛД) массиву текущей дальности, каждое из измерений которого, с использованием измеряемой инерциально-доплеровской системой угловой и навигационной информации и углов визирования цели, приводят к осям подвижной системы координат (ПСК), в проекциях на его же оси дополнительно определяют составляющие его абсолютной угловой скорости и компоненты абсолютной линейной скорости объекта, а на основе кинематических дифференциальных уравнений относительного движения цели и объекта, представленных в проекциях на оси ПСК, реализуют дискретную математическую процедуру оптимальной фильтрации входной последовательности вычисляемых составляющих дальности, в процессе которой оценивают оптимальные компоненты дальности до цели, составляющие ее абсолютной скорости и ускорения, по завершении работы которой оптимальный фильтр-идентификатор перенастраивают и переводят в режим краткосрочного, не превышающего 10 с, прогноза указанных параметров, при этом расчет поправок на стрельбу начинают с началом процедуры привязки к цели, текущие значения которых в виде символа НИМ индицируют на экране ИЛС летчика, который управляя объектом, в зависимости от режима применения АСП, совмещает ППМ либо с реальной целью, либо, в режиме целеуказания (ЦУ) от оператора, с неподвижным прицельным перекрестием (НПП) ИЛС, и удерживая ее управлением объекта в одном из этих положений, нажимает БК и осуществляет прицельную стрельбу.
Недостатком указанного способа прицеливания и применения неуправляемых АСП является:
- напряженный временной график прицеливания и исключительно высокая загруженность летчика при применении неуправляемых АСП, следствием чего является низкая эффективность их боевого применения.
Техническим результатом изобретения является расширение функциональных возможностей прицельных систем путем синтеза автоматической процедуры прицеливания по подвижной наземной цели в обеспечение эффективного применения неуправляемых АСП.
Указанный технический результат достигается тем, что в способе автоматического прицеливания по подвижной наземной цели, включающем реализацию процедуры привязки к цели и определение ее ориентации по непрерывным измерениям текущих углов визирования цели и ограниченному во времени (не более 3 с) измеряемому ЛД массиву текущей дальности до нее, каждое из измерений которого с использованием измеряемой ИНС угловой и навигационной информации приводят к осям ПСК в проекциях на оси которой определяют составляющие ее абсолютной угловой скорости и составляющие абсолютной линейной скорости движения объекта, а на основе кинематических дифференциальных уравнений относительного движения цели реализуют математическую процедуру оптимальной фильтрации и идентификации дискретно обновляющейся последовательности составляющих дальности, оценивают оптимальные компоненты дальности до цели, компоненты ее абсолютной линейной скорости и ускорения, по завершении работы которой оптимальный фильтр-идентификатор перенастраивают и переводят в режим краткосрочного, на время не более 10 с, прогноза его параметров, при этом расчет поправок на стрельбу осуществляют с началом процедуры привязки к цели, текущие значения которых в виде символа ППМ индицируют на экране ИЛС летчика и управляя объектом, в зависимости от режима применения НАСП, совмещают ППМ либо с реальной целью, либо в режиме ЦУ от оператора - с НИИ ИЛС, и удерживая ее в одном из этих положений, нажимают БК и осуществляют прицельную стрельбу, дополнительно, с началом процедуры привязки к цели, рассчитываемые поправки на стрельбу Δϕy, Δϕz, определяющие текущие угловые координаты расчетной точки падения боеприпаса, используют для формирования параметров необходимых для расчета потребных для прицельной стрельбы углов ориентации объекта, при этом в варианте применения АСП летчиком берут их с обратным знаком -Δϕy, -Δϕz, а в варианте применения АСП по ЦУ от оператора, определяют, как результат их сравнения с текущими углами визирования цели ϕy-Δϕy, ϕz-Δϕz, после чего указанные параметры в совокупности с текущими значениями углов эволюции объекта υ, γ, ψи используют для формирования текущих значений потребных для прицельной сопроводительной стрельбы углов ориентации объекта (потребное значение крена γП принимают равным нулю), значения которых сравнивают с текущими углами υ, γ, ψи эволюции объекта и формируют тем самым постоянно обновляющуюся последовательность входных сигналов оптимального фильтра-идентификатора, который синтезируют на основе дискретной процедуры оптимальной фильтрации идентификации и в соответствии с дифференциальными уравнениями, описывающими характер изменения текущей угловой ориентации объекта относительно изменяющегося во времени, потребного для прицельной стрельбы положения объекта, с параметрами состояния системы:  , из которых первые три параметра являются измеряемыми, при этом текущие значения оценок
, из которых первые три параметра являются измеряемыми, при этом текущие значения оценок  используют для коррекции соответствующих составляющих
используют для коррекции соответствующих составляющих  угловой скорости вращения потребной для осуществления прицельной сопроводительной стрельбы (ППСК), а по оценкам
угловой скорости вращения потребной для осуществления прицельной сопроводительной стрельбы (ППСК), а по оценкам  формируют оптимальные сигналы управления объектом и выдают их как в САУ объекта, так и в оптимальный фильтр-идентификатор и обеспечивают таким образом корректное, адекватное с САУ управление оцененными значениями углов, при этом сигналы управления реализуют линейное с насыщением управление, в котором значения
формируют оптимальные сигналы управления объектом и выдают их как в САУ объекта, так и в оптимальный фильтр-идентификатор и обеспечивают таким образом корректное, адекватное с САУ управление оцененными значениями углов, при этом сигналы управления реализуют линейное с насыщением управление, в котором значения  максимальных угловых скоростей управляющих сигналов, и зону их линейности
максимальных угловых скоростей управляющих сигналов, и зону их линейности  и
и  устанавливают по согласованию с разработчиком САУ и уточняют по результатам натурных испытаний, при этом контроль качества управления осуществляют по характеру перемещения ППМ и совмещения ее с реальной целью или с НПП ИЛС - в зависимости от режима применения неуправляемых АСП.
устанавливают по согласованию с разработчиком САУ и уточняют по результатам натурных испытаний, при этом контроль качества управления осуществляют по характеру перемещения ППМ и совмещения ее с реальной целью или с НПП ИЛС - в зависимости от режима применения неуправляемых АСП.
Для синтеза и раскрытия физической и математической сути автоматической процедуры прицеливания при применении неуправляемых АСП по подвижным наземным целям приведем перечень и описание фигур, которые потребуются при осуществлении предлагаемого изобретения.
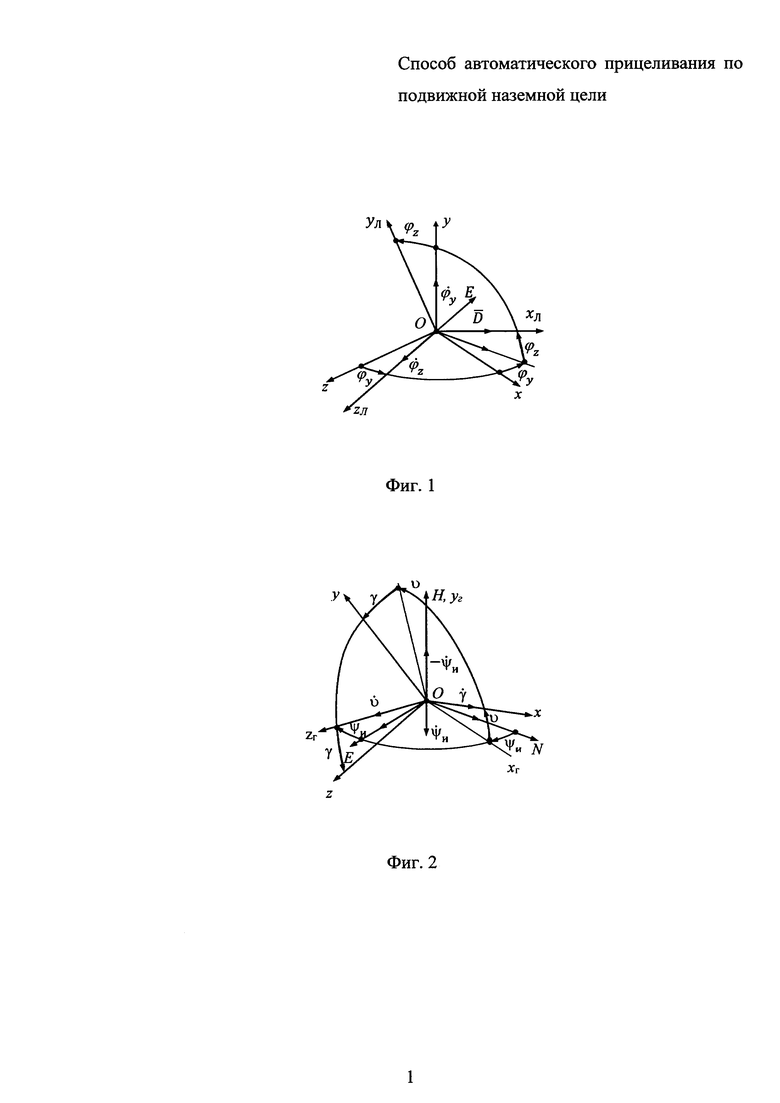
На фиг. 1 приведена взаимная ориентация связанной (ССК) Oxyz и лучевой (ЛСК) ОхЛyЛzЛ систем координат.
Их рассогласование определяется углами ϕy, ϕz визирования цели. Ось ОхЛ ЛСК направлена на цель, с указанной осью при угловом сопровождении цели совпадает вектор  наклонной дальности до цели (фиг. 1).
наклонной дальности до цели (фиг. 1).
Переход от осей ССК Oxyz к осям ЛСК ОхЛyЛzЛ осуществляется посредством двух последовательных поворотов на углы ϕy и ϕz с угловыми скоростями  и
и  соответственно.
соответственно.
Приведенное на фиг. 1 направление отсчета углов ϕy, ϕz и угловых скоростей  является положительным.
является положительным.
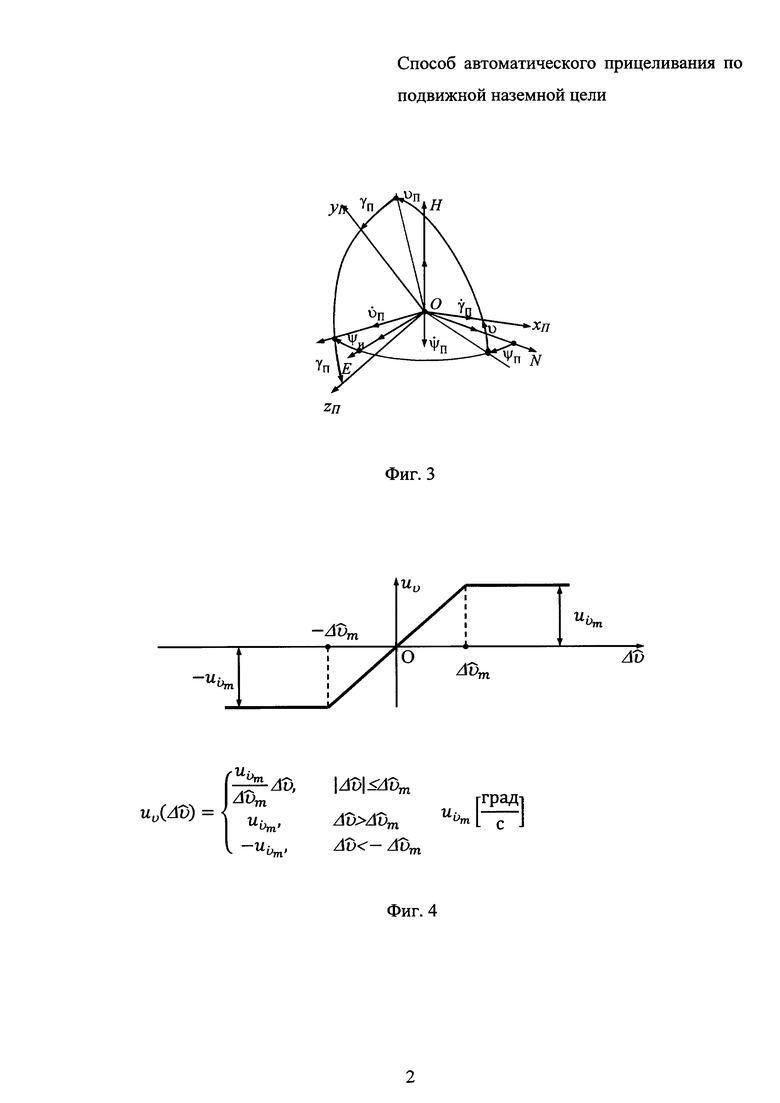
На фиг. 2 приведена взаимная ориентация географического сопровождающего трехгранника (ГСТ) ONHE и ССК Oxyz.
Их рассогласование определяется углами истинного курса ψи, тангажа υ и крена γ объекта.
Переход от осей ГСТ ONHE к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы ψи, υ и γ с угловыми скоростями  и
и  .
.
Приведенное на фиг. 2 направление отсчета углов ψи, υ, γ и угловых скоростей  является положительным.
является положительным.
На фиг. 3 приведена взаимная ориентация ГСТ ONHE и потребной для осуществления прицельной стрельбы системы координат (ППСК) OxПyПzП.
Их рассогласование определяется потребными для прицельной стрельбы углами курса ψП и тангажа υП. Поворот на угол потребного крена γП приведен для общности рассмотрения.
Переход от осей ГСТ ONHE к осям ППСК OxПyПzП осуществляется посредством трех последовательных поворотов на углы ϕП, υП и γП с угловыми скоростями  и
и  .
.
Приведенное на фиг. 3 направление отсчета углов ψП, υП и γП и угловых скоростей  и
и  является положительным.
является положительным.
Зона линейности сигнала управления равна [-Δυm÷+Δυm], его максимальное значение -  .
.
На фиг. 4 приведен пример сигнала управления объектом через систему автоматического управления (САУ) при отработке потребных для прицельной сопроводительной стрельбы углов ψП, υП и γП.
Сигнал управления  (в качестве примера выбран канал тангажа) имеет линейный с насыщением характер и изменяется в функции оценки
(в качестве примера выбран канал тангажа) имеет линейный с насыщением характер и изменяется в функции оценки  текущего значения угла отклонения объекта Δυ относительно постоянно изменяющегося направления прицельной стрельбы.
текущего значения угла отклонения объекта Δυ относительно постоянно изменяющегося направления прицельной стрельбы.
На фиг. 4 приведено аналитическое описание указанного сигнала.
Матричные преобразования, характеризующие взаимосвязь ГСТ ONHE, ССК Oxyz и ЛСК ОхЛyЛzЛ, имеют вид:


где S - матрица преобразования проекций произвольного вектора из осей ГСТ ONHE в оси ССК Oxyz; L - матрица преобразования проекций произвольного вектора из осей ССК Oxyz в оси ОхЛyЛzЛ; ST, LT - матрицы, транспонированные приведенным S и L.
Матрицы S и L, в соответствии с фиг. 1 и 2, равны:


где ψи, υ, γ - углы истинного курса, тангажа и крена объекта; ϕy, ϕz углы визирования цели.
В выражениях (3), (4) и далее под «s» следует понимать синус угла, а под «с» - косинус.
На основании (1) и (2), получим некоторые полезные для дальнейшего рассмотрения матричные соотношения.
Подставляя в первое матричное выражение соотношений (2) вместо вектора [х у z]T его значение, определяемое первым матричным выражением соотношений (1), получим:

Наряду с приведенным матричным преобразованием представляет интерес обратное ему преобразование. Оно имеет вид:

то есть для нахождения обратной матрицы (L5)-1 достаточно транспонировать прямую матрицу LS:

Матрица LS позволяет определить проекции произвольного вектора в осях ЛСК ОхЛyЛzЛ по известным его составляющим в проекциях на оси ГСТ ONHE. Указанная матрица, в соответствии с видом матриц L (4) и S (3), определяющих ее, будет равна:
Очевидно, что преобразование вида (5) может быть осуществлено посредством трех последовательных поворотов, по аналогии с фиг. 2. При этом в матрице LS указанного преобразования должны использоваться некоторые углы ψЛ, υЛ, γЛ, определяющие угловую ориентацию цели относительно осей ГСТ ONHE.
В рассматриваемом случае матрица LS будет равна:

Полагая элементы матрицы LS (8), (9) равными  (i, j=1÷3), запишем выражения для расчета углов ψЛ, υЛ, γЛ:
(i, j=1÷3), запишем выражения для расчета углов ψЛ, υЛ, γЛ:

Зная углы ориентации объекта ψи, υ, γ, а также углы визирования цели ϕy, ϕz, в соответствии с (8) могут быть определены элементы матрицы LS, используя которые в соответствии с (10) определяют введенные в рассмотрение углы ψЛ, υЛ, γЛ.
Если угловая ориентация объекта будет определяться (относительно осей ГСТ) углами ψЛ, υЛ, то его продольная ось Ох будет направлена на цель.
Представив себе в рассматриваемой ситуации стрельбу по цели, то, очевидно, ни один снаряд или ракета не поразит цель. И причина этого заключается в том, что для точного попадания в цель, необходимо, чтобы продольная ось объекта (оружия, ракеты) была ориентирована не в направлении цели, а в направлении, определяемом углами  прицельной марки, выражения для определения которых имеют вид:
прицельной марки, выражения для определения которых имеют вид:


где ϕy, ϕz - текущие значения углов визирования цели; Δϕy, Δϕz - текущие значения соответствующих поправок на стрельбу, характеризующие угловые координаты расчетной точки падения боеприпаса (БП), отсчитываемые в плоскости, ортогональной линии визирования цели.
Выражениями (11) определяются угловые координаты подвижной прицельной марки ППМ в режимах применения неуправляемых АСП по целеуказанию ЦУ от оператора, когда летчик-оператор постоянно, вплоть до нажатия боевой кнопки БК, осуществляет угловое сопровождение цели, а выражениями (12) - в режимах прицеливания, осуществляемых исключительно летчиком с использованием индикатора на лобовом стекле ИЛС.
Физически, указанными выражениями определяется потребная угловая ориентация объекта относительно линии визирования цели при выполнении им прицельной стрельбы.
Для определения требуемой для прицельной стрельбы угловой ориентации объекта относительно осей ГСТ ONHE необходимо в матрицу LS (8) вместо текущих углов ϕy, ϕz визирования цели подставить текущие значения угловых координат  ,
,  прицельной марки (11), (12).
прицельной марки (11), (12).
Указанная матрица необходима для расчета текущих значений потребных для осуществления прицельной стрельбы углов курса ψП, тангажа υП и крена γП. Расчет указанных углов должен осуществляться в соответствии с выражениями, аналогичными (10), но с использованием при этом следующих элементов матрицы LПS:
Выражения для расчета потребных углов прицельной сопроводительной стрельбы ψП, υП, γП, в соответствии с (10) и (13), будут иметь следующий вид:
Разницу между соответствующими текущими значениями углов ориентации объекта ψИ, υ, γ и потребными для осуществления прицельной стрельбы углами ψП, υП, γП обозначим через ΔψП, ΔυП, ΔγП:

Очевидно, что представленные выше сигналы (15), наблюдаемые на фоне некоррелированных шумов V1, V2, V3 в терминах оптимальной фильтрации можно интерпретировать, как сигналы измерения z1, z2, z3, синтезируемой автоматической системы прицельной стрельбы:

Под потребной для осуществления прицельной сопроводительной стрельбы системой координат будем понимать такую, в общем случае, подвижную систему координат, которая ориентирована относительно подвижной цели таким образом, что объект, будучи ориентированным вдоль ее продольной оси, можно считать готовым к выполнению прицельной стрельбы.
Исходными уравнениями для разработки автоматической процедуры прицеливания должны быть дифференциальные уравнения, описывающие характер изменения угловых скоростей  вращения ППСК OxПyПzП относительно ГСТ ONHE.
вращения ППСК OxПyПzП относительно ГСТ ONHE.
Для их получения запишем выражения для составляющих  угловой скорости вращения ППСК относительно ГСТ.
угловой скорости вращения ППСК относительно ГСТ.
Эти выражения, в соответствии с фиг. 3, имеют вид:


Решая приведенную систему алгебраических уравнений относительно  ,
,  , получим следующие дифференциальные уравнения, описывающие характер их изменения:
, получим следующие дифференциальные уравнения, описывающие характер их изменения:
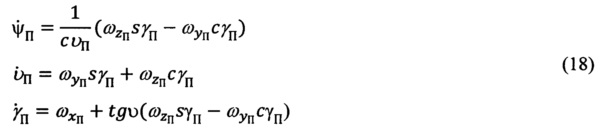
Представленные в виде системы дифференциальных уравнений все возможные вариации относительно единственно возможной угловой ориентации потребной для осуществления прицельной сопроводительной стрельбы системы координат ППСК OxПyПzП, движение которой описывается приведенными выше дифференциальными уравнениями (18) - это и есть искомые уравнения, которые необходимы для синтеза автоматической системы прицеливания по подвижной наземной или надводной цели.
Для их получения проварьируем дифференциальные уравнения (18) по всем, фигурирующим в их правых частях, параметрам, а именно,  , υП и γП.
, υП и γП.
В результате проведения указанной операции, получим следующие дифференциальные уравнения:
Входящие в полученную систему дифференциальных уравнений углы υП и γП являются текущими углами прицельной стрельбы (14), а под ΔψП, ΔυП, ΔγП следует понимать отклонения (15) текущих углов ориентации объекта от потребных углов ψП, υП, γП прицельной стрельбы.
При варьировании уравнений (18) предполагалось, что составляющие  ,
,  , имеют характер цветных шумов первого порядка с ненулевыми математическими ожиданиями.
, имеют характер цветных шумов первого порядка с ненулевыми математическими ожиданиями.
Описывающие их дифференциальные уравнения имеют вид:
где μi, σi (i=x, y, z) - известные параметры цветного шума, характеризующие его изменчивость и интенсивность соответственно; Wx, Wy, Wz - некоррелированные гауссовские шумы единичной интенсивности.
Приведенное описание ошибок расчета составляющих  относительной угловой скорости вращения ППСК OxПyПzП (20) является неслучайным, поскольку для расчета указанных составляющих нет никакого другого варианта их определения, кроме как их расчет в соответствии с выражениями (17), предполагающего использование процедур численного дифференцирования. Именно этим и определяется выбор для описания составляющих цветных шумов 1-го порядка.
относительной угловой скорости вращения ППСК OxПyПzП (20) является неслучайным, поскольку для расчета указанных составляющих нет никакого другого варианта их определения, кроме как их расчет в соответствии с выражениями (17), предполагающего использование процедур численного дифференцирования. Именно этим и определяется выбор для описания составляющих цветных шумов 1-го порядка.
На основании имеющегося опыта эксплуатации боевых самолетов и вертолетов, касающегося применения неуправляемых АСП, а также, учитывая, что для вывода объекта в положение прицельной стрельбы достаточно отработать потребные значения углов курса ψП и тангажа υП, представляется целесообразным потребное для прицельной стрельбы значение угла крена γП принять равным нулю, то есть γП=0.
Подставляя указанное значение γП в дифференциальные уравнения (19), приведем их к следующему виду:

Объединяя приведенные выше системы дифференциальных уравнений (21) и (20), получим искомую замкнутую кинематическую модель ошибок, описывающую характер изменения текущей угловой ориентации объекта относительно, изменяющегося во времени потребного для прицельной сопроводительной стрельбы положения:
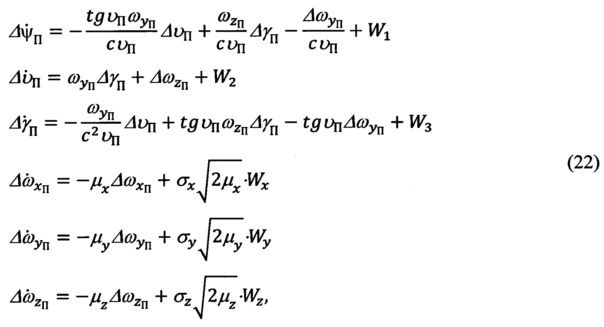
где W1, W2, W3 - некоррелированные гауссовские шумы возмущения, действующие в каналах, описывающих характер изменения углов ΔψП, ΔυП, ΔγП, которые введены с целью расширения возможностей управления качеством оптимального оценивания.
Приведенная система дифференциальных уравнений является линейной и в матричном виде может быть представлена следующим образом:

где X - вектор параметров состояния системы (22), равный:

F - матрица состояния системы; Г - матрица передачи шумов возмущения системы (22).
На основе полученной выше модели ошибок (22) и в соответствии с сигналами измерения (16) будет синтезирована процедура их оптимальной фильтрации и идентификации полного вектора параметров состояния (24).
Синтез структуры и алгоритма рассматриваемого фильтра-идентификатора будем проводить в соответствии с традиционной дискретной процедурой оптимальной фильтрации Калмана, приведенной в Э. Сейдж, Дж. Меле. Теория оценивания и ее применение в связи и управлении. – М.: Связь, 1976 [2].
Приведем сводку ее основных соотношений (с. 269 [2]):
1. Исходная модель сообщения:

2. Модель наблюдения:

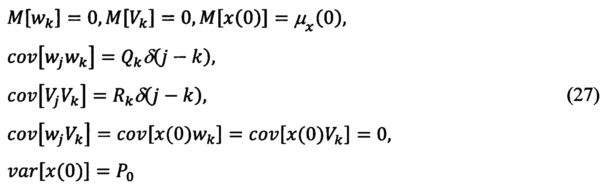
3. Априорные данные, используемые при синтезе:
4. Структура оптимального фильтра:

где 
5. Вычисление матрицы априорных ошибок оценивания:

6. Вычисление оптимальных коэффициентов усиления:

7. Вычисление матрицы апостериорных ошибок оценивания:

Последнюю операцию, представленную выражением (31), следует рассматривать, как подготовительную к следующему такту вычислений.
В приведенных соотношениях приняты следующие условные обозначения:
xk - вектор параметров состояния системы;
 - вектор оптимальных апостериорных оценок параметров состояния;
- вектор оптимальных апостериорных оценок параметров состояния;
wk - вектор случайных возмущений модели сообщения;
Vk - вектор случайных шумов измерения;
Фk+1,k - фундаментальная матрица системы (модели сообщения);
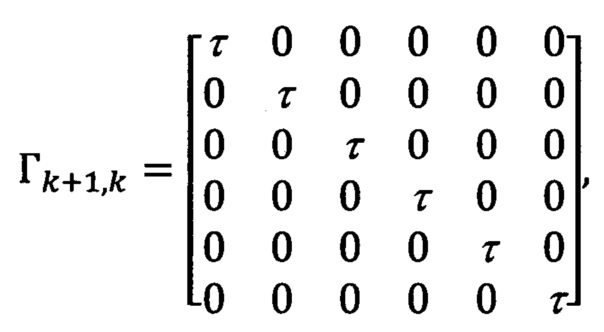
Гk+1,k - матрица передачи случайных возмущений системы;
Hk - матрица измерения;
 - вектор априорных оценок параметров состояния системы;
- вектор априорных оценок параметров состояния системы;
Pk+1,k - априорная корреляционная матрица ошибок оценивания;
Pk+1 - апостериорная корреляционная матрица ошибок оценивания;
Qk - корреляционная матрица случайных шумов системы;
Rk - корреляционная матрица случайных шумов измерения;
zk - вектор сигналов измерения;
Kk+1 - матрица оптимальных коэффициентов усиления.
Представим полученную выше систему дифференциальных уравнений (22) в дискретном виде (25):

где τ - дискретность счета, Wik (i=1÷6) - компоненты вектора случайных возмущений:

введенные в рассмотрение для общего случая решения рассматриваемой задачи.
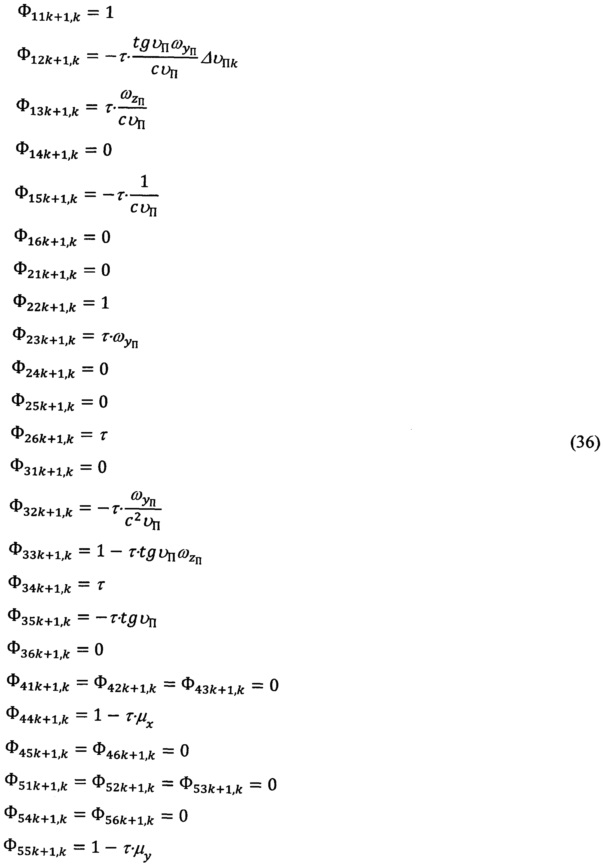
Из системы уравнений (32) достаточно просто могут быть предоставлены фундаментальная матрица системы Фk+1,k и матрица Гk+1,k передачи возмущений системы:

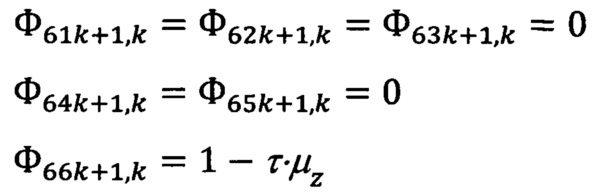
Элементы фундаментальной матрицы Фijk+1,k (34) в соответствии с (32) равны:
Матрица измерения Hk и матрица оптимальных коэффициентов усиления фильтра Kk+1 будут иметь следующий вид:
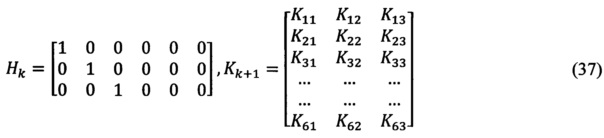
где текущие значения матрицы Kk+1 рассчитываются в соответствии с матричным выражением (30).
Корреляционные матрицы шумов измерения Rk и возмущения Qk имеют вид диагональных матриц и равны:
где  σi(i=1÷3) и σx, σy, σz выбираются на основании опытных данных.
σi(i=1÷3) и σx, σy, σz выбираются на основании опытных данных.
Априорная Pk+1,k и апостериорная Rk+1 матрицы ошибок оценивания фильтра идентификатора имеют порядок [6×6] и рассчитываются в соответствии с матричными выражениями (29) и (31).
С инженерной точки зрения приведенная процедура оптимальной фильтрации и идентификации ошибок угловой ориентации объекта относительно положения прицельной стрельбы представляет интерес, как неотъемлемая часть системы автоматического оптимального управления объектом в обеспечение автоматизации одного из ответственных этапов применения неуправляемых АСП.
Характеризуя ее, следует отметить, что указанная процедура разработана для системы шестого порядка и включает в себя три канала оценивания ошибок угловой ориентации объекта и случайных ошибок измерения и расчета составляющих угловой скорости вращения ПСК OxПyПzП, каждый из которых работает по своему входу.
При этом ни один из этих каналов не рассматривается, как нечто самостоятельное, поскольку все они, в соответствии с разработанной моделью ошибок, являются взаимозависимыми.
Одной из важнейших особенностей синтеза рассматриваемой системы автоматического управления объектом в обеспечение прицельного применения АСП является, раздельное проведение процедуры оптимального оценивания всех необходимых для формирования сигналов управления параметров и формирование на их основе самих сигналов управления с гарантированным при этом обеспечением оптимальности управления. Соответствие отмеченных особенностей основным положениям теоремы разделения, приведенной в монографии А.А. Красовского. Аналитическое конструирование контуров управления летательными аппаратами. - М.: Машиностроение, 1969, [3] свидетельствует о корректности проведенного синтеза.
Заявляемый способ автоматического прицеливания по подвижной наземной цели реализуется следующим образом:
1. На основе непрерывного углового сопровождения цели (посредством обзорно-прицельной системой (ОПС)) и ограниченного во времени, не превышающего 3 с, измерения лазерным дальномером массива наклонной дальности до нее реализуют оптимальную процедуру привязки к цели с определением ее относительного положения и параметров движения.
2. Для этого, каждое, вновь поступившее измерение дискретного массива наклонной дальности с использованием измеряемой ИНС угловой и навигационной информации и углов визирования цели, приводят к осям подвижной системы координат. В проекциях на его же оси определяют составляющие его абсолютной угловой скорости вращения и компоненты абсолютной линейной скорости движения объекта, а на основе кинематических дифференциальных уравнений относительного движения цели реализуют математическую процедуру оптимальной фильтрации и идентификации дискретно обновляющейся последовательности составляющих дальности до цели в проекциях на оси ППСК.
По результатам их обработки оценивают оптимальные компоненты дальности до цели, составляющие ее абсолютной скорости и ускорения.
3. По завершении режима привязки к цели, факт чего устанавливают по истечении 3-секундного интервала измерения дальности, фильтр-идентификатор перенастраивают и переводят в режим краткосрочного, на время не более 10 с, прогноза его основных параметров.
4. Расчет поправок на стрельбу осуществляют с началом процедуры привязки к цели, текущие значения которых в виде символа подвижной прицельной марки индицируют на экране индикатора на лобовом стекле ИЛС летчика, и управляя объектом, в зависимости от режима применения АСП, совмещают ППМ либо с реальной целью, либо, в режиме целеуказания от оператора - с неподвижным прицельным перекрестием ИЛС, и, удерживая ее управлением объекта в одном из этих положений, нажимают БК и осуществляют прицельную стрельбу.
Дополнительно, с началом процедуры привязки к цели:
5. Рассчитываемые поправки на стрельбу Δϕy, Δϕz, определяющие текущие угловые координаты расчетной точки падения боеприпаса используют для формирования параметров, необходимых для расчета потребных для осуществления прицельной стрельбы углов ψП, υП и γП.
6. При этом, в варианте применения АСП летчиком, поправки на стрельбу берут с обратным знаком -Δϕy, -Δϕz (12), а в варианте применения АСП по ЦУ от оператора, определяют, как результат их сравнения с текущими углами визирования цели ϕy-Δϕy, ϕz-Δϕz (11), после чего указанные параметры, в совокупности с текущими значениями углов эволюции объекта ψи, υ, γ, используют для расчета отдельных элементов матрицы направляющих косинусов, определяемых углами прицельной стрельбы (13), по которым рассчитывают текущие значения углов ψП, υП, γП (14), необходимых для осуществления прицельной стрельбы, при этом потребное значение угла γП принимают равным нулю.
7. Сравнивая потребные для прицельной стрельбы углы ориентации объекта (14) с текущими значениями углов его ориентации, формируют постоянно обновляющуюся последовательность входных сигналов оптимального фильтра-идентификатора (15), (16), оценивающего необходимые для автоматизации процедуры прицеливания параметры.
8. Структуру оптимального фильтра-идентификатора синтезируют на основе дискретной процедуры оптимальной фильтрации Калмана (25)÷(38) и в соответствии с дифференциальными уравнениями (22), описывающими характер изменения текущей угловой ориентации объекта относительно изменяющегося во времени потребного для прицельной стрельбы положения объекта.
9. Вывод описывающих указанный процесс дифференциальных уравнений (22) приведен в разделе осуществления изобретения и представлен взаимосвязанной цепочкой выражений и уравнений (17)÷(22) и приведенными к ним пояснениями.
10. В перечень параметров состояния прицельной системы входят три угла ΔψП, ΔυП, ΔγП текущего отклонения объекта относительно положения прицельной стрельбы (21) и три компоненты  случайных ошибок измерения/расчета угловой скорости вращения ППСК относительно ГСТ ONHE, из которых первые три аддитивно входят в сигналы измерения.
случайных ошибок измерения/расчета угловой скорости вращения ППСК относительно ГСТ ONHE, из которых первые три аддитивно входят в сигналы измерения.
При этом текущие значения оценок  используют для коррекции соответствующих составляющих
используют для коррекции соответствующих составляющих  угловой скорости вращения ППСК, а по оценкам
угловой скорости вращения ППСК, а по оценкам  формируют оптимальные сигналы управления объектом и выдают их как в систему автоматического управления (САУ) объекта, так в оптимальный фильтр-идентификатор и обеспечивают таким образом корректное и адекватное с САУ управление оцененными значениями углов, поскольку факт того, что на объект действует известное внешнее управление должен в обязательном порядке учитываться в математической модели, описывающей текущую угловую ориентацию объекта относительно положения прицельной стрельбы.
формируют оптимальные сигналы управления объектом и выдают их как в систему автоматического управления (САУ) объекта, так в оптимальный фильтр-идентификатор и обеспечивают таким образом корректное и адекватное с САУ управление оцененными значениями углов, поскольку факт того, что на объект действует известное внешнее управление должен в обязательном порядке учитываться в математической модели, описывающей текущую угловую ориентацию объекта относительно положения прицельной стрельбы.
При этом, сигналы управления реализуют линейное с насыщением управление (фиг. 1), в котором значения  максимальных угловых скоростей управляющих сигналов и зону их линейности
максимальных угловых скоростей управляющих сигналов и зону их линейности  устанавливают по согласованию с разработчиком САУ и уточняют по результатам натурных испытаний.
устанавливают по согласованию с разработчиком САУ и уточняют по результатам натурных испытаний.
11. Контроль качества управления осуществляют по характеру перемещения ППМ и совмещения ее с реальной целью или с НИИ ИЛС (под которой также должна наблюдаться цель) - в зависимости от режима применения неуправляемых АСП.
Из приведенного описания заявляемого способа автоматического прицеливания по подвижной наземной цели следует, что суть предлагаемого способа раскрыта и технический результат изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ СУБОПТИМАЛЬНОЙ ПРОЦЕДУРЫ УГЛОВОГО СОПРОВОЖДЕНИЯ | 2016 |
|
RU2621374C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ МОДИФИЦИРОВАННОЙ, ИНВАРИАНТНОЙ К РЕЛЬЕФУ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ УГЛОМЕСТНОЙ ПРОЦЕДУРЫ РАСЧЁТА ДАЛЬНОСТИ | 2016 |
|
RU2617373C1 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
| СПОСОБ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ЕЁ КОРРЕКЦИИ ПО НЕПОДВИЖНОМУ НАЗЕМНОМУ ОРИЕНТИРУ С ИЗВЕСТНЫМИ ГЕОГРАФИЧЕСКИМИ КООРДИНАТАМИ | 2019 |
|
RU2713582C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2407977C1 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| Способ прицеливания при стрельбе из пушки по маневрирующей воздушной цели | 2019 |
|
RU2707325C1 |
Изобретение относится к информационно измерительным комплексам и системам управления боевыми летательными аппаратами (ЛА). Технический результат - расширение функциональных возможностей прицельных систем путем синтеза автоматической процедуры прицеливания по подвижной наземной цели для обеспечения эффективного применения неуправляемых авиационных средств поражения (АСП). Для этого в режиме оптимальной привязки к цели по измерениям обзорно-прицельной и инерциально-доплеровской систем определяют относительные координаты и параметры ее движения в осях географического сопровождающего трехгранника (ГСТ) ONHE. По ее окончании оптимальный фильтр переводят в режим прогноза параметров цели. Параллельно с процедурой привязки и прогноза рассчитывают компоненты скорости ветра и воздушной скорости объекта и цели в проекциях на оси связанной системы координат. По ним определяют угловые поправки на стрельбу и потребные для прицельной сопроводительной стрельбы углы ориентации объекта, используя которые формируют входные сигналы оптимального фильтра-идентификатора, оценивающего необходимые для управления текущие значения углов ориентации объекта относительно постоянно изменяющегося направления прицельной стрельбы и ошибки расчета угловой скорости вращения объекта. Оценки последних используют для коррекции составляющих угловой скорости объекта, а оценки углов отклонения объекта относительно направления прицельной стрельбы - для формирования сигналов управления объектом. За летчиком остается выполнение функции контроля качества управления объектом и нажатие боевой кнопки (БК). 4 ил.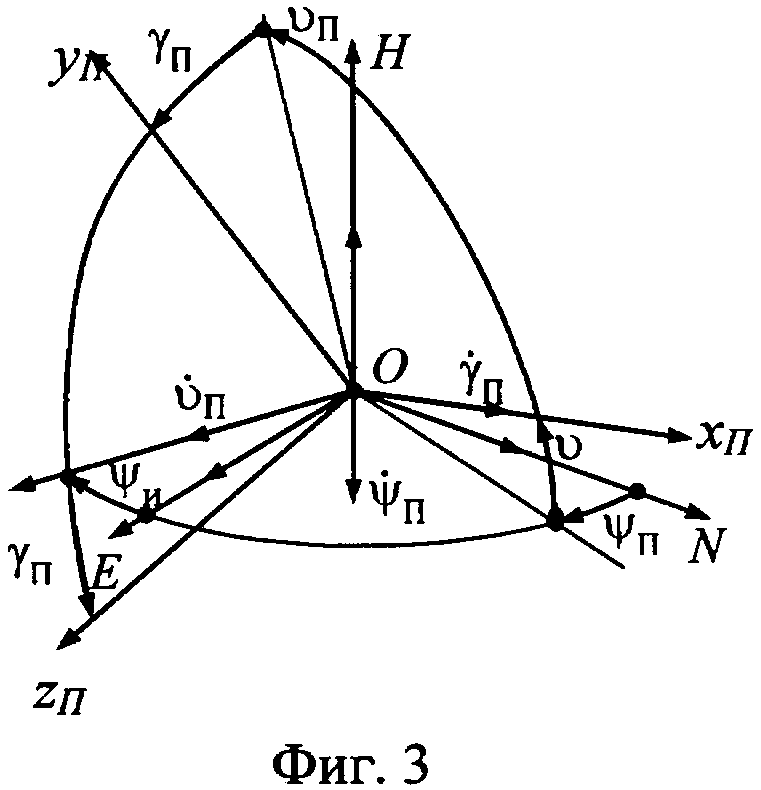
Способ автоматического прицеливания по подвижной наземной цели, включающий реализацию процедуры привязки к цели и определение ее ориентации по непрерывным измерениям текущих углов визирования цели и ограниченному во времени (не более 3 с) измеряемому лазерным дальномером (ЛД) массиву текущей дальности до нее, каждое из измерений которого с использованием измеряемой инерциальной навигационной системой (ИНС) угловой и навигационной информации приводят к осям подвижной системы координат (ПСК) в проекциях, на оси которой определяют составляющие ее абсолютной угловой скорости и составляющие абсолютной линейной скорости движения объекта, а на основе кинематических дифференциальных уравнений относительного движения цели в проекциях на оси ПСК реализуют математическую процедуру оптимальной фильтрации и идентификации дискретно обновляющейся последовательности составляющих дальности, оценивают оптимальные компоненты дальности до цели, компоненты ее абсолютной линейной скорости и ускорения, по завершении работы которой оптимальный фильтр-идентификатор перенастраивают и переводят в режим краткосрочного, на время не более 10 с, прогноза его параметров, при этом расчет поправок на стрельбу осуществляют с началом процедуры привязки к цели, текущие значения которых в виде символа подвижной прицельной марки (ППМ) индицируют на экране индикатора на лобовом стекле (ИЛС) летчика, и управляя объектом, в зависимости от режима применения неуправляемого авиационного средства поражения (АСП), совмещают ППМ либо с реальной целью, либо в режиме целеуказания (ЦУ) от оператора - с неподвижным прицельным перекрестием (НПП) ИЛС и, удерживая ее в одном из этих положений, нажимают боевую кнопку (БК) и осуществляют прицельную стрельбу, отличающийся тем, что с началом процедуры привязки к цели рассчитываемые поправки на стрельбу Δϕy, Δϕz, определяющие текущие угловые координаты расчетной точки падения боеприпаса, используют для формирования параметров необходимых для расчета потребных для прицельной стрельбы углов ориентации объекта, при этом в варианте применения авиационных средств поражения (АСП) летчиком берут их с обратным знаком -Δϕy, -Δϕz, а в варианте применения АСП по ЦУ от оператора определяют как результат их сравнения с текущими углами визирования цели ϕy-Δϕy, ϕz-Δϕz, после чего указанные параметры в совокупности с текущими значениями углов эволюции объекта υ, γ, ψи используют для формирования текущих значений потребных для прицельной сопроводительной стрельбы углов ориентации объекта (потребное значение крена γП принимают равным нулю), текущие значения которых сравнивают с текущими углами υ, γ, ψи эволюции объекта и формируют тем самым постоянно обновляющуюся последовательность входных сигналов оптимального фильтра-идентификатора, который синтезируют на основе дискретной процедуры оптимальной фильтрации и идентификации и в соответствии с дифференциальными уравнениями, описывающими характер изменения текущей угловой ориентации объекта относительно изменяющегося во времени, потребного для прицельной стрельбы положения объекта с параметрами состояния системы  , из которых первые три являются измеряемыми, при этом текущие значения оценок
, из которых первые три являются измеряемыми, при этом текущие значения оценок  используют для коррекции соответствующих составляющих
используют для коррекции соответствующих составляющих 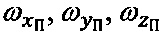 угловой скорости вращения потребной для прицельной стрельбы системы координат (ППСК), а по оценкам
угловой скорости вращения потребной для прицельной стрельбы системы координат (ППСК), а по оценкам  формируют оптимальные сигналы управления объектом и выдают их как в систему автоматического управления (САУ) объекта, так и в оптимальный фильтр-идентификатор, чем обеспечивают математически корректное и адекватное с САУ управление оцененными значениями углов, при этом сигналы управления реализуют линейное с насыщением управление, в котором значения
формируют оптимальные сигналы управления объектом и выдают их как в систему автоматического управления (САУ) объекта, так и в оптимальный фильтр-идентификатор, чем обеспечивают математически корректное и адекватное с САУ управление оцененными значениями углов, при этом сигналы управления реализуют линейное с насыщением управление, в котором значения  максимальных угловых скоростей управляющих сигналов, и зону их линейности
максимальных угловых скоростей управляющих сигналов, и зону их линейности  и
и  устанавливают по согласованию с разработчиком САУ и уточняют по результатам натурных испытаний, при этом контроль качества управления осуществляют по характеру перемещения ППМ и совмещения ее с реальной целью или с НПП ИЛС - в зависимости от режима применения неуправляемых АСП.
устанавливают по согласованию с разработчиком САУ и уточняют по результатам натурных испытаний, при этом контроль качества управления осуществляют по характеру перемещения ППМ и совмещения ее с реальной целью или с НПП ИЛС - в зависимости от режима применения неуправляемых АСП.
| Гришутин В.Г | |||
| Лекции по авиационным прицельным системам стрельбы | |||
| Киев, ВВАИУ, 1980, 324-326 | |||
| ОБЗОРНО-ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2391262C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННО-ПРИЦЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2451907C1 |
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-16, 391-507 | |||
| Ботуз С.П | |||
| Обработка многомерной числовой информации при исследовании и разработке бортовых САУ | |||
| - В кн.: Конструирование и технология изготовления космических приборов | |||
| - М.: ИКИ АН СССР, Наука, 1983 | |||
| с | |||
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
| Красовский А.А | |||
| Аналитическое конструирование контуров управления летательными аппаратами | |||
| - М.: Машиностроение, 1969, с | |||
| Способ получения морфия из опия | 1922 |
|
SU127A1 |

