Изобретение относится к измерительной технике, в частности к устройствам определения углов наклона подвижных объектов.
Известны датчики угла наклона подвижного объекта, содержащие физический маятник с компенсатором влияния инерционных сил, действие которого заключается в приложении к маятнику компенсационного момента, равного по величине моменту от горизонтальной составляющей силы инерции, действующей на тело маятника, и противоположного ему по знаку. Вертикальная составляющая сил инерции, действующей на тело маятника, воспринимается соответствующей реакцией его опоры и не вызывает отклонения тела маятника от равновесного положения 1, с. 63-91.
Недостатком известного технического решения является сложность конструкции, включающей в себя последовательно соединенные датчики поступательной скорости объекта, дифференциальное звено для вычисления ускорения и моментный двигатель для приложения к телу маятника компенсационного момента. Такая конструкция не точна и не надежна в работе.
Наиболее близкое к предлагаемому датчику угла наклона техническое решение - угломер 2, который состоит из сектора, снабженного по дуге градусными делениями.
В центре сектора поворотно укреплены два жестких отвеса с грузами разного веса. Оба отвеса соединены между собой посредством шарнирного колена, жестко скрепленного со стрелкой, служащей для
CJ
1
Ю
VJ
Ю
указания по шкале градусной величины угла наклона. Это устройство вводит поправку на влияние сил инерции. В рассматриваемой конструкции компенсация действия инерционных сил в плоскости колебаний маятника производится механически и не способствует необходимому повышению точности измерения угла наклона подвижного объекта, что является недостатком.
Целью изобретения является повышение точности измерения угла наклона подвижного объекта за счет усовершенствования узла компенсации ускорения и узла формирования информации о наклоне.
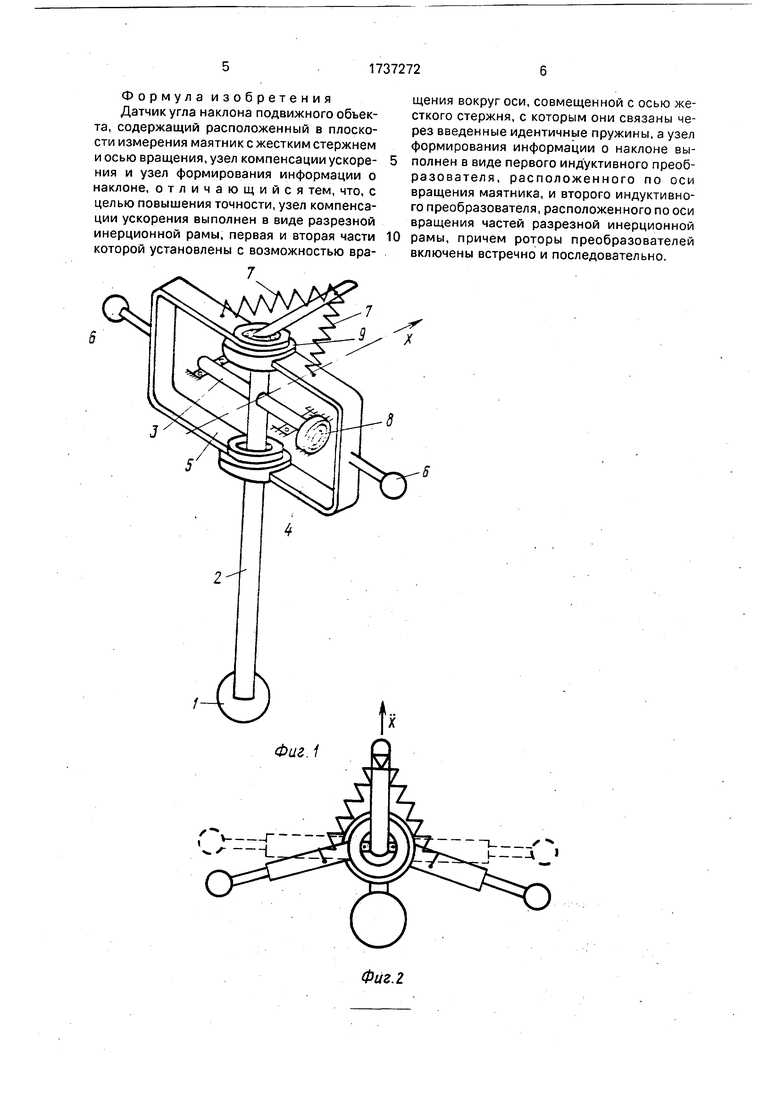
На фиг. 1 приведена принципиальная схема датчика угла наклона в статическом состоянии при отсутствии наклона и ускорения движения подвижного объекта; на фиг. 2 - то же, при действии горизонтальной составляющей ускорения в плоскости измерения наклона.
Датчик угла наклона подвижного объекта содержит расположенный в плоскости измерения маятник 1 с жестким стержнем 2 и осью 3 вращения, узел компенсации ускорения и узел формирования информации о наклоне. Узел компенсации ускорения выполнен в виде разрезной инерционной рамы, первая 4 и вторая 5 части которой, соединенные с одинаковыми грузами б, установлены с возможностью вращения вокруг оси, совмещенной с осью жесткого стержня, с которыми они связаны через введенные идентичные пружины 7, а узел формирования информации о наклоне выполнен в виде первого индуктивного преобразователя 8, расположенного по оси вращения маятника, и второго индуктивного преобразователя 9, расположенного по оси вращения частей разрезной инерционной рамы. Первый и второй индуктивные преобразователи состоят из статора и ротора. Статор первого индуктивного преобразователя жестко закреплен с корпусом датчика, а ротор - с осью вращения маятника с жестким стержнем, Статор второго ин- дуктивного преобразователя жестко закреплен с первой частью разрезной инерционной рамы, а ротор - с второй частью. Причем роторы преобразователя включены встречно и последовательно.
Датчик угла наклона подвижного объекта работает следующим образом. При наклоне подвижного объекта на угол а маятник 1 с жестким стержнем 2 сохраняет свое вертикальное положение, а первая 4 и вторая 5 части разрезной инерционной рамы не меняют свое положение относительно друг друга по оси, совмещенной с осью
жесткого стержня 2. Корпус датчика, отклоняясь относительно маятника 1 с жестким стержнем 2 по оси 3 вращения, поворачивает статор первого индуктивного преобразо- вателя 8 относительно ротора, формируется электрический сигнал, пропорциональный углу а., Так как первая 4 и вторая 5 части разрезной инерционной рамы, а следовательно, статор и ротор второго индукционного преобразователя не меняют свое положение относительно друг друга, то выходной сигнал с второго индукционного преобразователя равен нулю. Суммарный сигнал первого и второго индуктивных преобразователей равен выходному сигналу первого индуктивного преобразователя, т. е. выходной сигнал датчика соответствует углу наклона подвижного объекта.
При действии горизонтальной составляющей ускорения подвижного объекта в плоскости измерения датчика центры тяжести маятника 1 с жестким стержнем 2, в целом, и первой 4 и второй 5 частей разрезной инерционной рамы с грузами 6, в частности,
стремятся остаться на месте. Это вызывает поворот маятника 1 с жестким стержнем 2 по оси 3 относительно корпуса датчика и изменения положения первой 4 и второй 5 частей разрезной инерционной рамы относительно друг друга по оси, совмещенной с осью жесткого стержня. Следовательно, в обоих индуктивных преобразователях роторы повернутся относительно статоров и на выходах преобразователей формируются
электрические сигналы, равные по величине. Благодаря встречно-последовательному соединению роторов преобразователей суммарный сигнал датчика будет равен нулю, то есть датчик оказывается нечувствительным к горизонтальной составляющей ускорения и подвижного объекта в плоскости измерения угла наклона.
При наличии наклона и ускорения по- движного объекта на обоих индуктивных преобразователях формируются электрические сигналы, но с первого индуктивного преобразователя выходной сигнал больше по величине (так как пропорционален углу наклона и горизонтальной составляющей ускорения в плоскости измерения), чем выходной сигнал с второго индуктивного преобразователя (так как пропорционален горизонтальной составляющей ускорения в плоскости измерения). Поэтому выходной сигнал датчика, равный разности выходных сигналов первого и второго индуктивных преобразователей, соответствует углу наклона подвижного объекта.
Формула изобретения Датчик угла наклона подвижного объекта, содержащий расположенный в плоскости измерения маятник с жестким стержнем и осью вращения, узел компенсации ускорения и узел формирования информации о наклоне, отличающийся тем, что, с целью повышения точности, узел компенсации ускорения выполнен в виде разрезной инерционной рамы, первая и вторая части которой установлены с возможностью вра7
0
щения вокруг оси, совмещенной с осью жесткого стержня, с которым они связаны через введенные идентичные пружины, а узел формирования информации о наклоне выполнен в виде первого инд уктивного преобразователя, расположенного по оси вращения маятника, и второго индуктивного преобразователя, расположенного по оси вращения частей разрезной инерционной рамы, причем роторы преобразователей включены встречно и последовательно.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| Маятниковый датчик угла наклона подвижного объекта | 1987 |
|
SU1500823A1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2012 |
|
RU2500988C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2065572C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПУСКА БОЕПРИПАСА ЕГО БОРТОВЫМ ДАТЧИКОМ ДО СТАРТА ПРИ ОТСУТСТВИИ ЭЛЕКТРОПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2224204C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
Изобретение относится к геодезическому приборостроению, в частности к средствам для определения углов наклона подвижных объектов. Целью изобретения является повышение точности измерений. Устройство содержит маятник 1 с жестким стержнем 2 и осью 3 вращения, узел компенсации ускорения и узел формирования информации о наклоне. Узел компенсации ускорения включает в себя разрезную инерционную раму, первая 4 и вторая 5 части которой установлены с возможностью вращения вокруг оси, совмещенной с осью жесткого стержня 2, и связаны со стержнем двумя идентичными пружинами 7. Узел формирования информации о наклоне включает в себя первый 8 и второй 9 индуктивные преобразователи, связанные соответственно с осями вращения маятника и разрезной инерционной рамы. Роторы преобразователей 8, 9 включены встречно и последовательно. 2 ил.
| Малкин Л | |||
| А | |||
| и Шелленгер В | |||
| И | |||
| Автоматические приборы для определения превышений | |||
| Труды МИИГА и К, вып | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Уклономер | 1932 |
|
SU32167A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
