Изобретение относится к электротехнике, а именно к способам и устройствам управления шаговыми двигателями (ШД).
Наиболее широко при работе биполярного ШД используется полношаговый режим, как позволяющий развивать максимальный момент. При этом регулирование тока в обмотках обеспечивается импульсным регулятором, который на интервале отключения обмотки от источника тока обеспечивает медленный спад тока (slow decay mode) для минимизации частоты переключений и уровня пульсаций.
Известны технические решения, которые применяются для стабилизации уровня тока в обмотке двухфазного шагового двигателя при его работе в полношаговом режиме. Наиболее широко применяются способы стабилизации тока в обмотке ШД, включающие в себя циклическую подачу напряжения питания на обмотку, сравнение тока в питающей диагонали моста с пороговым значением на интервале времени от момента подачи напряжения до достижения величиной тока порогового значения и снятие напряжения питания с обмотки на фиксированный по длительности интервал времени. Такое решение применяется в большинстве современных драйверов ШД. Например в А4989 Allegro Microsystems [1] или ТМС262 TRINAMIC Motion Control GmbH & Co. KG [2]. Необходимость использования фиксированного по длительности интервала времени выключенного состояния (Fixed Off-Time) вызвано отсутствием информации о величине тока при отключении обмотки ШД от источника питания. Недостаток данного способа обусловлен тем что, несмотря на непрерывность тока в обмотке ШД, при использовании в качестве чувствительного элемента датчика тока резистора включенного между нижней точкой питающей диагонали силового моста и минусом источника питания, при выключении напряжения питания обмотки ток в нем прерывается. Из-за этого независимо от величины тока на момент окончания отрезка времени «Fixed Off-Time» приходится подавать напряжение на обмотку. Это, если ток в этот момент больше порогового значения, приводит к дополнительному приросту тока вместо его снижения и повышению частоты переключения, что, в свою очередь, повышает нагрев элементов силового моста. Описание работы ключей силового моста и характер изменения токов приведены, например, в [3].
При работе ШД в полношаговом режиме стабилизация уровня тока в обмотке обеспечивается включением и отключением верхнего ключа в одном плече силового моста, при постоянно подключенном нижнем ключе - в другом плече. В [4] для обеспечения постоянного протекания тока обмотки ШД через чувствительный элемент датчика тока аноды защитных диодов нижних транзисторов силового моста подключены к минусу источника питания, как показано на FIG.3 [4]. Такое решение не может быть применено на практике так как в современных силовых транзисторах как биполярных, так и полевых, р - n переход или канал сток - исток зашунтированы диодом в обратном включении, физически входящим в состав транзистора. Поэтому при отключении верхнего ключа силового моста при достижении током порогового значения большая часть тока пройдет по контуру (Slow decay), показанному на рисунке 1 в [3], то есть мимо измерительного резистора.
За прототип авторами принято техническое решение, описанное в [1]. Задачей предполагаемого изобретения является повышение точности стабилизации тока и снижение количества переключений ключей силового моста. Решение этой задачи достигается за счет того, что превышение уровнем тока заданного верхнего порогового значения определяют в нижнем плече того силового полумоста, в котором ток течет в прямом направлении, обеспечивая непрерывный контроль уровня тока в любой момент его протекания в обмотке, а очередное включение напряжения питания производят при достижении уровнем тока заданного нижнего порогового значения.
Для реализации предлагаемого способа стабилизации уровня тока в обмотке двухфазного шагового двигателя в его драйвер введены дополнительный измерительный резистор и дополнительный компаратор. Причем нижняя точка правого силового полумоста соединена через дополнительный измерительный резистор с отрицательным выводом источника питания шагового двигателя и со вторым входом дополнительного компаратора, первый вход которого соединен с выходом цифро-аналогового преобразователя. Второй вход блока формирования сигнала стабилизации тока соединен с первым выходом блока формирования управляющих сигналов, третий выход которого соединен с четвертым входом блока формирования сигнала стабилизации тока, третий вход которого соединен с выходом дополнительного компаратора. Блок формирования сигнала стабилизации тока содержит логический элемент 2ИЛИ и два логических элемента 2И, выходы которых подключены к входам логического элемента 2ИЛИ, чей выход является выходом блока формирования сигнала стабилизации тока, четыре входа которого соединены соответственно с входами логических элементов 2И.
Сущность предлагаемого технического решения поясняется чертежами.
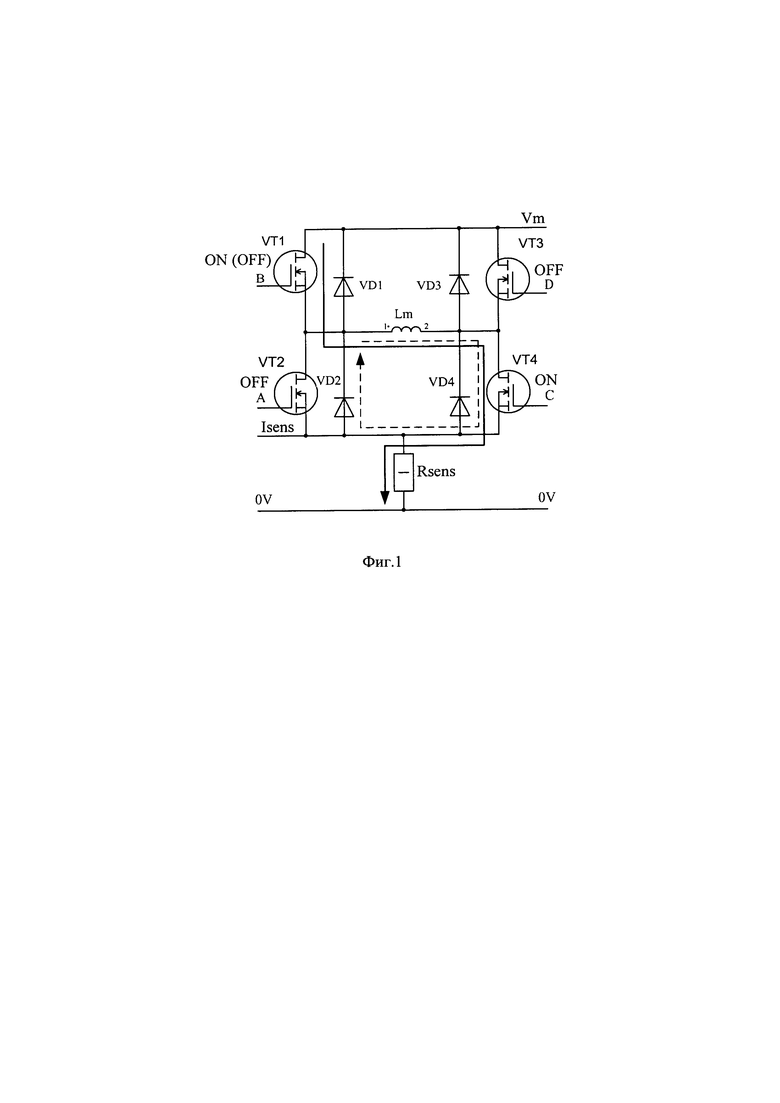
Фиг. 1. Схема протекания тока через чувствительный элемент датчика, характерная для прототипа и аналогов.
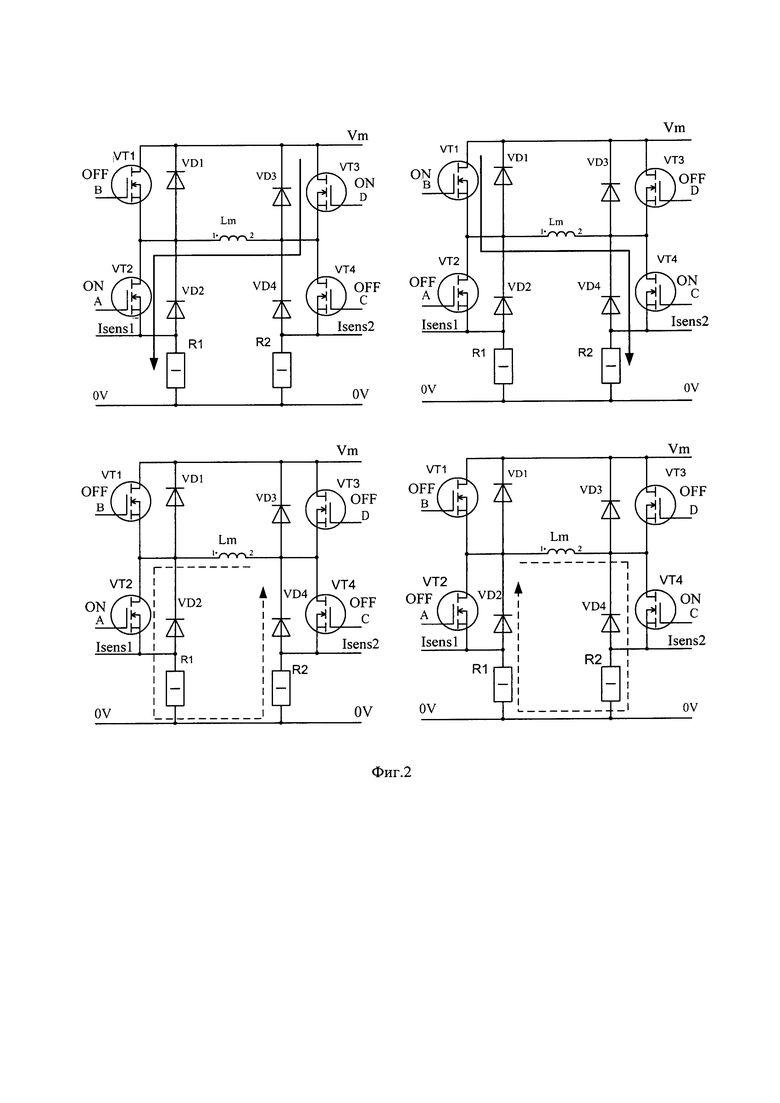
Фиг. 2. Предлагаемая схема протекания тока через чувствительные элементы датчика.
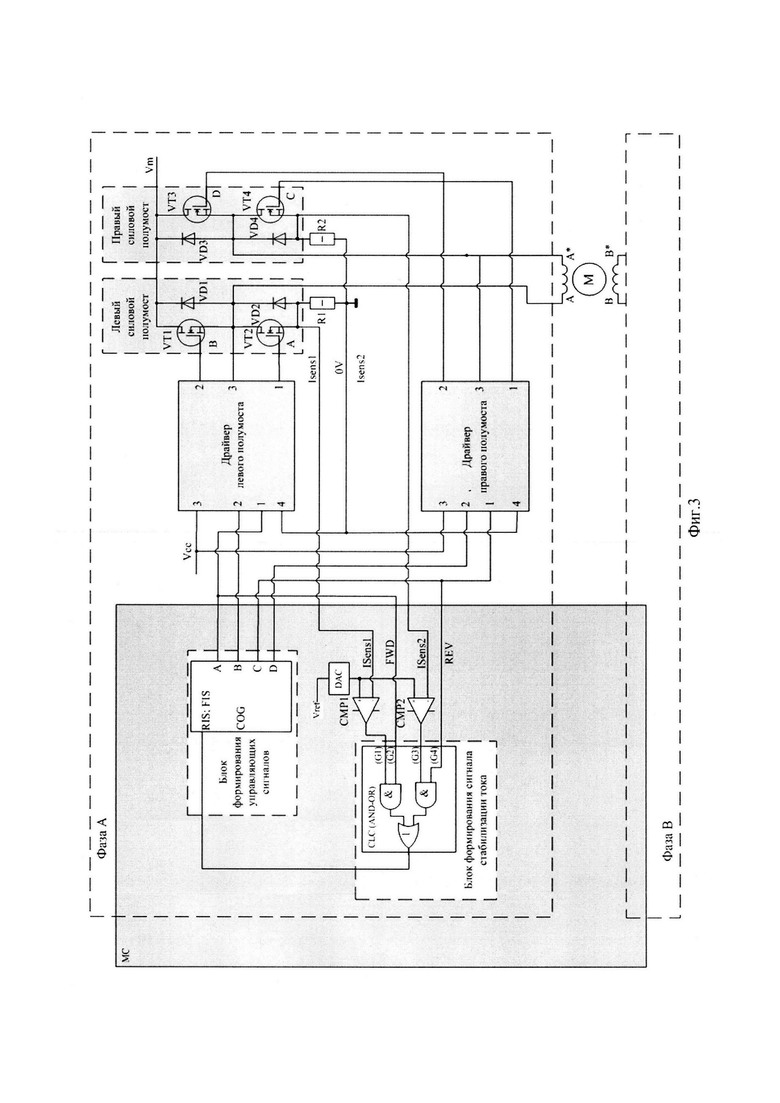
Фиг. 3. Функциональная схема драйвера двухфазного биполярного шагового двигателя с контуром стабилизации уровня тока в обмотке, реализующим предлагаемый способ.
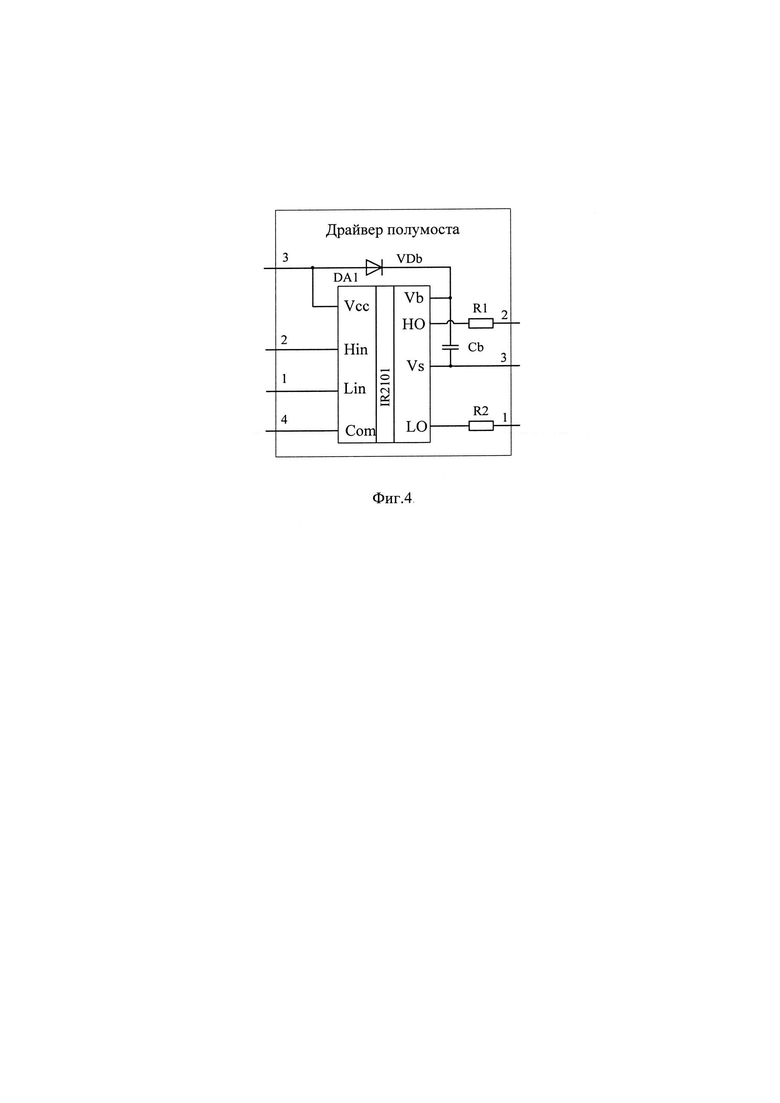
Фиг. 4. Электрическая принципиальная схема возможного исполнения драйвера полумоста.
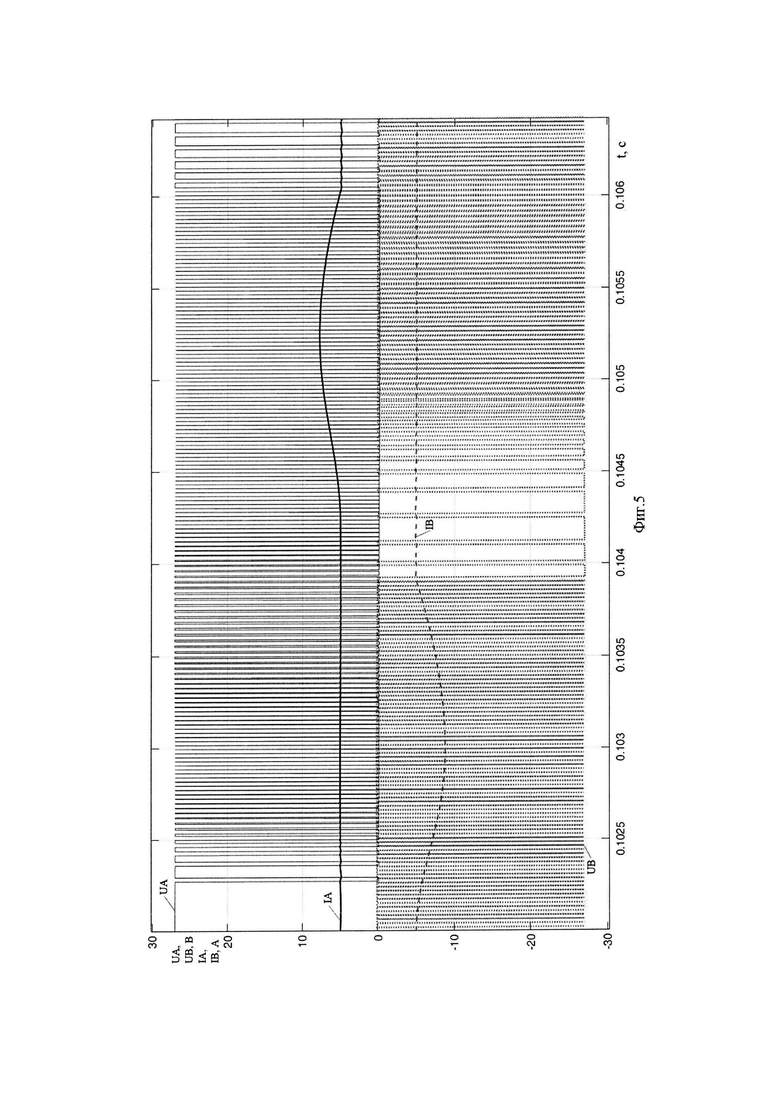
Фиг. 5. Результаты компьютерного моделирования работы ШД, драйвер которого реализует способ стабилизации уровня тока, описанный в [1] (прототип).
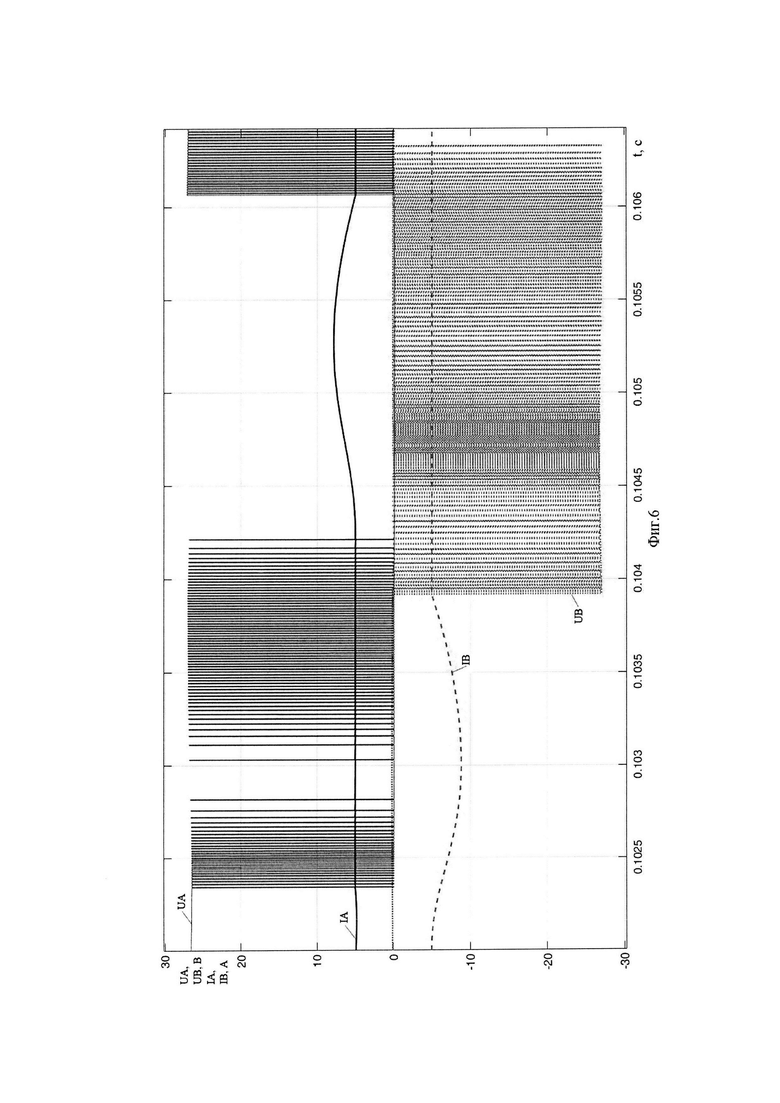
Фиг. 6. Результаты компьютерного моделирования работы ШД, драйвер которого реализует предлагаемый способ стабилизации уровня тока.
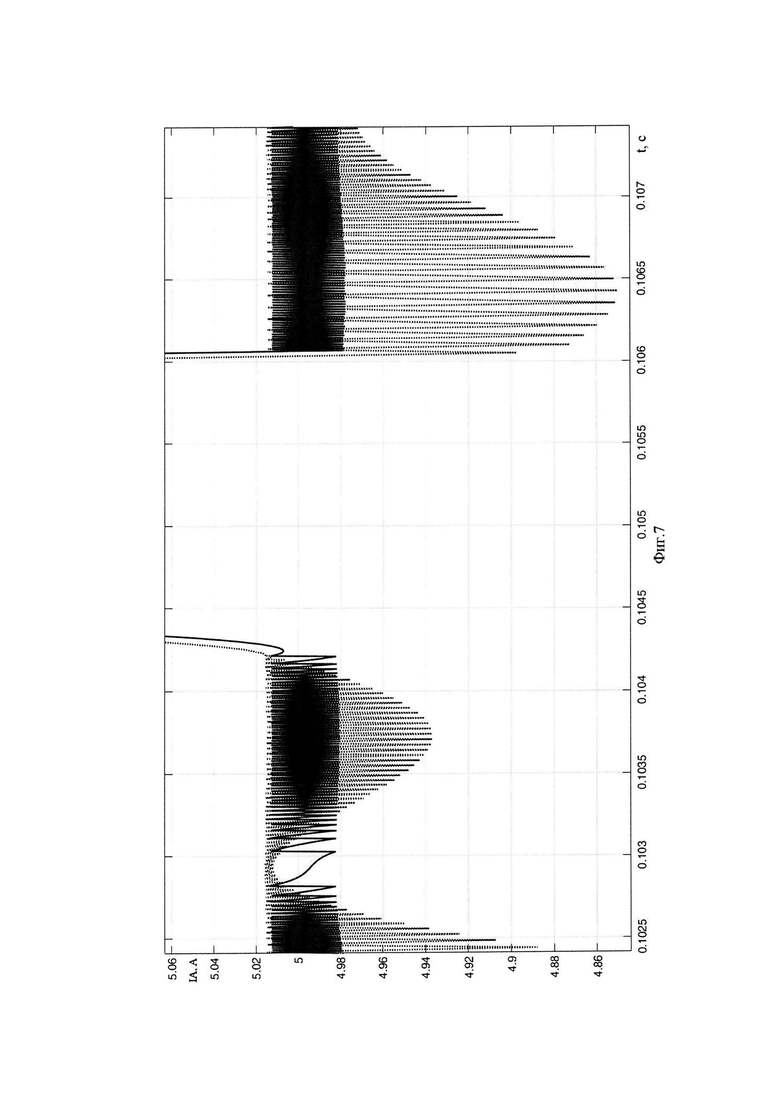
Фиг. 7. Осциллограммы изменения тока фазы А в крупном масштабе для предлагаемого способа и прототипа при отработке одного и того же участка типовой циклограммы, полученные методом компьютерного моделирования.
На фиг. 1 показана характерная для аналогов и прототипа схема протекания тока в цепях силового моста. Сплошной линией показан путь протекания тока через обмотку ШД при подключенном к силовому мосту источнике питания (ключи В и С замкнуты, А и D -разомкнуты). Штриховой линией показан путь протекания тока при отключенном источнике питания (ключ С замкнут, А, В и D - разомкнуты). Анализ путей протекания тока через цепи силового моста показывает, что при отключенном от обмотки ШД источнике питания ток обмотки не протекает через измерительный резистор Rsens, являющийся чувствительным элементом контура стабилизации уровня тока в обмотке. Поэтому технические решения, применяемые в [1 - 3], не позволяют контролировать уровень тока в обмотке ШД, когда она отключена от источника питания. В этом случае при отключенном источнике питания невозможно определить момент времени, когда ток в обмотке уменьшится до нижнего порогового значения и потребуется очередное подключение источника питания для стабилизации тока около заданного значения. Тогда, чтобы оценить уровень тока в обмотке, приходится подключать ее к источнику питания, хотя бы на очень короткое время. При этом, обычно [1, 2], при формировании управляющего сигнала модуляции напряжения питания используется отключение обмотки на постоянный отрезок времени «Fixed Off-Time», а момент времени отключения обмотки от источника питания определяется по превышению уровнем тока заданного порогового значения.
Схема протекания тока в цепях силового моста для предлагаемого технического решения приведена на фиг. 2. Для обеспечения непрерывного контроля уровня тока в любой момент его протекания в обмотке предлагается разделить силовой мост на два полумоста, включив в каждый из них свой измерительный резистор между нижней точкой полумоста и отрицательным выводом источника питания, как показано на фиг. 2. На рисунках показаны пути протекания тока в цепях силового моста для всех возможных сочетаний коммутации ключей, применяемых при работе контура стабилизации уровня тока драйвера ШД с использованием предлагаемого способа стабилизации уровня тока в обмотке. Видно, что во всех показанных случаях коммутации ключей силового моста ток протекает хотя бы через один из двух используемых измерительных резисторов R1 и R2. Это позволяет контролировать уровень тока в обмотке ШД в любой момент времени его работы независимо от состояния ключей. Мы предлагаем контролировать уровень тока в нижнем плече того силового полумоста, в котором в этот момент времени открыт нижний ключ, а значит ток протекает в положительном направлении, т.е. от положительного вывода источника питания Vm к отрицательному выводу 0V.
Функциональная схема драйвера ШД, реализующего предлагаемый способ приведена на фиг.З. Управление работой устройства осуществляется микроконтроллером МС, в качестве которого можно использовать PIC16F1778 Microchip Technology Inc.[5]. На периферийных элементах микроконтроллера построены блок формирования управляющих сигналов, блок формирования сигнала стабилизации тока, компараторы СМР1 и СМР2 и цифроаналоговый преобразователь (ЦАП) DAC. Блок формирования сигнала стабилизации тока выполнен на одной конфигурируемой логической ячейке CONFIGURABLE LOGIC CELL (CLC), реализующей логическую функцию И-ИЛИ. Блок формирования управляющих сигналов построен на модуле генератора комплиментарного выхода COG (COMPLEMENTARY OUTPUT GENERATOR MODULES). Выходные сигналы блока формирования управляющих сигналов, имеющие логические уровни 5 вольт, преобразуются драйверами левого и правого полумостов в уровни напряжений, необходимые для работы полевых транзисторов соответствующего силового полумоста. В качестве драйверов полумостов, которые питаются от источника напряжения Vcc, применены драйверы верхнего и нижнего ключей IR2101S Infineon Technologies AG [6] со схемой включения, приведенной на фиг. 4, соответствующей Typical Connection в [5].
Так как драйвер двухфазного биполярного ШД содержит два идентичных предлагаемых контура стабилизации уровня тока в обмотках его фаз А и В, то его работа будет рассмотрена на примере фазы А.
При включении напряжения питания программа инициализации производит конфигурирование всех периферийных устройств в заданные режимы и обеспечивает внутреннее соединение друг с другом посредством записи соответствующих значений в конфигурационные регистры. При этом прямые входы компаратора СМР1 и дополнительного компаратора СМР2 соединяются с выходом ЦАП DAC, на вход которого поступает опорное напряжение Vref с источника фиксированного опорного напряжения FIXED VOLTAGE REFERENCE (FVR). Инверсные входы обоих компараторов соединены с выводами МС, на которые поступают сигналы ISensl и ISens2 с измерительного резистора R1 и дополнительного измерительного резистора R2 соответственно (см. фиг. 3). Сигналы с выходов обоих компараторов поступают на входы соответствующих элементов 2И блока формирования сигнала стабилизации тока, на другие входы которых поступают сигналы с первого и третьего выходов (А и С) блока формирования управляющих сигналов. Состояние этих сигналов определяет выбор сигнала ISensl или ISens2, по которому будет выполняться стабилизация уровня тока, протекающего в обмотке ШД и нижнем плече соответствующего силового полумоста, в котором в это время открыт нижний ключ (соответственно А или С). Выходные сигналы элементов 2И логически складываются в элементе 2ИЛИ и поступают на выход CLC, являющегося выходом блока формирования сигнала стабилизации тока. Силовые полумосты питаются от источника напряжения Vm.
Модуль COG, на основе которого выполнен блок формирования управляющих сигналов, настраивается на один из режимов прямого (Forward Full-Bridge mode) или обратного (Reverse Full-Bridge mode) управления полным мостом. При этом в качестве независимого источника сигналов нарастания и спада (RIS и FIS) тока выбирается сигнал с выхода блока формирования сигнала стабилизации тока. Диаграмма работы модуля COG в используемом режиме показана на FIGURE 27-13 [5]: FULL-BRIDGE MODE COG OPERATION WITH CCP1 AND DIRECTION CHANGE. Приведенный на этом рисунке сигнал MD0 (определяемый программно соответствующим битом в конфигурационном регистре COG) определяет направление протекания тока. При MD0=0 (направление протекания тока FWD) открыты ключи A (VT2) и D (VT3). В этом случае стабилизация тока выполняется по сигналу ISensl за счет модуляции открытого состояния ключа D (VT3). Для смены направления тока в обмотке на обратное достаточно изменить состояние бита MD0 на противоположное (MD0=1). При этом в модуле COG блока формирования управляющих сигналов произойдет передача управления на выходы В и С. Появление сигнала логическая «1» на выходе С модуля COG и соответственно на третьем выходе блока формирования управляющих сигналов приведет к закрытию ключей А (VT2) и D (VT3) и открытию ключей В (VT1) и С (VT4) и передаст управление дополнительному компаратору СМР2, работающему по сигналу ISens2 с дополнительного измерительного резистора R2. Заданный уровень стабилизации тока будет обеспечиваться за счет модуляции открытого состояния ключа В (VT1).
Работоспособность и эффективность предлагаемого технического решения подтверждается результатами компьютерного моделирования работы ШД под управлением драйвера на базе А4989 Allegro MicroSystems [1] и под управлением драйвера, контур стабилизации уровня тока в обмотке ШД выполнен в соответствии с функциональной схемой, представленной на фиг. 3.
На фиг. 5 приведены осциллограммы изменения напряжения UA и UB, подаваемого на обмотки фаз А и В ШД, и токов IA и IB в этих обмотках при использовании драйвера на базе А4989 Allegro MicroSystems для участка отработки типовой циклограммы, когда направления токов фаз имеют разные значения. На этих осциллограммах видно, что на участках, когда уровень тока в обмотке превышает заданное верхнее пороговое значение, все равно происходит подключение напряжения питания для контроля текущего значения уровня тока. А это приводит к дополнительному повышению уровня тока вместо требуемого его снижения и необязательной в этом случае коммутации ключей, вызывающей дополнительный разогрев их и диодов и, соответственно, энергетические потери. Видно также, что время выключенного состояния ключей при модуляции всегда одинаково.
На фиг. 6 показаны аналогичные осциллограммы изменения напряжений UA и UB и токов фаз IA и IB при использовании драйвера, в котором контур стабилизации уровня тока в обмотке ШД выполнен с использованием предлагаемого технического решения. Осциллограммы получены для участка отработки той же самой типовой циклограммы, что и в предыдущем случае. Видно, что на участках, где уровень тока в обмотке превышает заданное верхнее пороговое значение, подача напряжения на обмотки не производится, а очередное включение напряжения питания производится при достижении уровнем тока заданного нижнего порогового значения. А значит, на этих участках нет коммутации ключей и соответствующих этим процессам энергозатрат. Это также облегчает тепловой режим элементов силового моста и как следствие, увеличивает надежность работы ключей. На осциллограммах, приведенных на фиг. 5 и фиг. 6, ток IA показан толстой сплошной линией, напряжение UA - тонкой сплошной линией, ток IB - штриховой линией, а напряжение UB - пунктирной линией.
На фиг. 7 приведены совместно осциллограммы тока фазы А ШД, полученные на одном участке отработки типовой циклограммы в крупном масштабе. Ток IA, полученный с применением предлагаемого технического решения показан тонкой сплошной линией, а при использовании технического решения прототипа - пунктирной линией. Видно, что точность стабилизации тока при использовании предлагаемого технического решения стабильна и составляет примерно 0,5%, а для прототипа - она переменна, а погрешность на представленном участке достигает 2,9%.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. A4989-Datasheet.pdf, Inc. www.allegromicro.com.
2. ТМС262 DATASHEET (Rev. 2.14 / 2016-JUL-14) www.trinamic.com.
3. Борисевич А.В., Глебко Д.В. Подход к оптимальной стратегии переключений для регулятора тока в обмотках шагового двигателя // Современная техника и технологии. 2015. №3 [Электронный ресурс]. URL: http://technology.snauka.ru/2015/03/5935
4. US 6211642 B1 OPEN-LOOP STEP MOTOR CONTROL SYSTEM, Apr. 3, 2001.
5. DS 40001819B.pdf www.microchip.com/
6. Ir210x.pdf Data Sheet No. PD60043 Rev.O www.infineon.com/gate-driver-ics/ir2101/.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ ТОКА В ОБМОТКЕ ДВУХОБМОТОЧНОГО ШАГОВОГО ДВИГАТЕЛЯ, РАБОТАЮЩЕГО В ПОЛНОШАГОВОМ РЕЖИМЕ, И ДРАЙВЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2737662C1 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ ЭЛЕКТРОПРИВОДА НА ОСНОВЕ ДВУХОБМОТОЧНОГО ШАГОВОГО ДВИГАТЕЛЯ, РАБОТАЮЩЕГО В ПОЛНОШАГОВОМ РЕЖИМЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2738348C1 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ ЭЛЕКТРОПРИВОДА НА ОСНОВЕ ДВУХОБМОТОЧНОГО ШАГОВОГО ДВИГАТЕЛЯ, РАБОТАЮЩЕГО В ПОЛНОШАГОВОМ РЕЖИМЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2774923C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2719604C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2725619C1 |
| Трехфазный выпрямитель напряжения с корректором коэффициента мощности | 2023 |
|
RU2813799C1 |
| Устройство для дифференциально-фазной защиты | 1982 |
|
SU1113866A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С БИПОЛЯРНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2713224C1 |
| Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу USB и устройство для его осуществления | 2018 |
|
RU2704486C1 |
| ИСТОЧНИК ПИТАНИЯ ТОКОМ ОБМОТОК РАЗМАГНИЧИВАНИЯ | 2023 |
|
RU2808773C1 |
Изобретение относится к области электротехники и может быть использовано для управления шаговыми двигателями (ШД). Техническим результатом является повышение точности стабилизации уровня тока и снижение энергопотребления и повышение надежности работы драйвера за счет снижения количества переключений ключей силового моста. Способ стабилизации уровня тока в обмотке двухфазного биполярного шагового двигателя (ШД) обеспечивает непрерывный контроль уровня тока в любой момент его протекания в обмотке ШД за счет определения превышения уровнем тока заданного верхнего порогового значения в нижнем плече того силового полумоста, в котором ток течет в прямом направлении. Для реализации способа стабилизации уровня тока в обмотке двухфазного ШД в его драйвер введены дополнительный измерительный резистор и дополнительный компаратор. Причем нижняя точка правого силового полумоста соединена через дополнительный измерительный резистор с отрицательным выводом источника питания шагового двигателя и со вторым входом дополнительного компаратора, первый вход которого соединен с выходом цифроаналогового преобразователя. Второй вход блока формирования сигнала стабилизации тока соединен с первым выходом блока формирования управляющих сигналов, третий выход которого соединен с четвертым входом блока формирования сигнала стабилизации тока, третий вход которого соединен с выходом дополнительного компаратора. Блок формирования сигнала стабилизации тока содержит логический элемент 2ИЛИ и два логических элемента 2И, выходы которых подключены к входам логического элемента 2ИЛИ, чей выход является выходом блока формирования сигнала стабилизации тока, четыре входа которого соединены соответственно с входами логических элементов 2И. 2 н.п. ф-лы, 7 ил.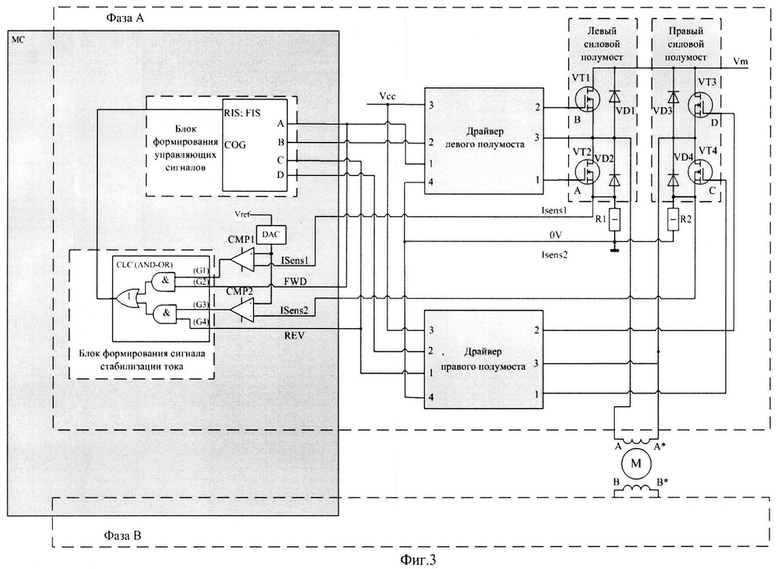
1. Способ стабилизации уровня тока в обмотке двухфазного биполярного шагового двигателя в полношаговом режиме, состоящий в определении превышения уровнем тока некоторого заданного верхнего порогового значения и отключении напряжения питания на некоторый промежуток времени, отличающийся тем, что превышение уровнем тока заданного верхнего порогового значения определяют в нижнем плече того силового полумоста, в котором ток течет в прямом направлении, обеспечивая непрерывный контроль уровня тока в любой момент его протекания в обмотке, а очередное включение напряжения питания производят при достижении уровнем тока заданного нижнего порогового значения.
2. Драйвер двухфазного биполярного шагового двигателя, контур стабилизации уровня тока в обмотке которого содержит последовательно соединенные цифроаналоговый преобразователь, компаратор, блок формирования сигнала стабилизации тока и блок формирования управляющих сигналов, а также измерительный резистор, драйверы левого и правого полумостов и два силовых полумоста, причем первый и второй выходы блока формирования управляющих сигналов соединены с соответствующими входами драйвера левого полумоста, третий и четвертый выходы блока формирования управляющих сигналов соединены с соответствующими входами драйвера правого полумоста, одновременно первый и второй выходы каждого драйвера соединены с управляющими входами соответствующих силовых полумостов, верхние точки которых соединены с положительным выводом источника питания шагового двигателя, а средние точки - с обмоткой шагового двигателя, при этом нижняя точка левого силового полумоста через измерительный резистор соединена с отрицательным выводом источника питания шагового двигателя и вторым входом компаратора, третьи и четвертые входы обоих драйверов соединены соответственно с положительным и отрицательным выводами источника питания драйверов, а их третьи выходы - соответственно со средними точками левого и правого силовых полумостов, а вход цифроаналогового преобразователя соединен с положительным выводом источника опорного напряжения и отрицательные выводы всех источников питания соединены между собой, отличающийся тем, что в него введены дополнительный измерительный резистор и дополнительный компаратор, причем нижняя точка правого силового полумоста соединена через дополнительный измерительный резистор с отрицательным выводом источника питания шагового двигателя и со вторым входом дополнительного компаратора, первый вход которого соединен с выходом цифроаналогового преобразователя, одновременно второй вход блока формирования сигнала стабилизации тока соединен с первым выходом блока формирования управляющих сигналов, третий выход которого соединен с четвертым входом блока формирования сигнала стабилизации тока, третий вход которого соединен с выходом дополнительного компаратора, а блок формирования сигнала стабилизации тока содержит логический элемент 2ИЛИ и два логических элемента 2И, выходы которых подключены к входам логического элемента 2ИЛИ, чей выход является выходом блока формирования сигнала стабилизации тока, четыре входа которого соединены соответственно с входами логических элементов 2И.
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2610713C1 |
| Устройство для управления шаговым электродвигателем | 1986 |
|
SU1410266A1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР С КЛАССИФИКАЦИЕЙ ОБЪЕКТА | 2013 |
|
RU2528114C1 |
| ВЗРЫВОЗАЩИТНАЯ РАЗРУШАЮЩАЯСЯ КОНСТРУКЦИЯ ОГРАЖДЕНИЯ ЗДАНИЙ | 2014 |
|
RU2572868C1 |
| JP 2000184789 A, 30.06.2000 | |||
| US 4675590 A, 23.06.1987 | |||
| CN 102025308 A, 20.04.2011. | |||

