Предлагаемое изобретение относится к электротехнике, и может быть использовано для контроля работы шагового привода, содержащего двухобмоточный шаговый двигатель (ШД), работающий в полношаговом режиме.
Наиболее часто при работе двухобмоточного ШД используется полношаговый режим, как позволяющий развивать максимальный момент. При этом регулирование тока в обмотках обеспечивается импульсным регулятором, который на интервале отключения обмотки от источника тока обеспечивает медленный спад тока для минимизации частоты переключений и уровня пульсаций.
Известны способы контроля работы шагового привода, использующие датчик положения механически соединенный с ротором шагового двигателя, например [1] или [2]. Такие технические решения требуют введения в конструкцию привода дополнительных конструкционных элементов - самого датчика положения и элементов, обеспечивающих соединение его с ротором ШД, что ведет к увеличению массогабаритных характеристик. Известны также способы бесконтактного контроля, использующие кроме напряжений на обмотках ШД, управляющие сигналы его драйвера, например, как предложено в [3]. Необходимость использования для контроля внутренних управляющих сигналов делает невозможным использование данного технического решение для контроля уже эксплуатирующихся приводов.
Наиболее близким к заявляемому техническому решению является способ контроля работы шагового привода, содержащего двухфазный шаговый электродвигатель, описанный в [4], принятый за прототип. Указанное техническое решение обеспечивает контроль наличия и смены полярности напряжений на выходе драйвера, что не содержит информацию о наличии или отсутствии подключенных к нему обмоток ШД. Кроме того, при использовании импульсной стабилизации тока в обмотках ШД (как, например, в современных драйверах: А4989 Allegro MicroSystems [5] или ТМС262 TRINAMIC Motion Control GmbH & Co. KG [6]) выходной сигнал предложенного в прототипе устройства будет иметь импульсный характер со случайной частотой, так как регулирование тока в каждой обмотке происходит независимо и, в большинстве драйверов, асинхронно.
Использованная в прототипе на выходе устройства диодная сборка, являющаяся схемой выбора максимального значения, в сочетании с резистивными делителями не позволяет обеспечить выходное напряжение с низким импедансом. Это приводит к увеличению уровня помех и ухудшению частотных свойств устройства. Кроме того, использование диодной схемы на выходе приводит к неопределенному состоянию при всех запертых диодах.
Задачей предполагаемого изобретения является расширение функциональных возможностей и повышение достоверности контроля. Техническим результатом применения предлагаемого решения будет возможность осуществлять непрерывный и независимый мониторинг работы электропривода при помощи средств телеметрического контроля.
Для решения этой задачи во время работы ШД непрерывно измеряют токи в каждой обмотке, формируют два сигнала напряжения, соответствующие току в каждой обмотке, сравнивают их с заданными верхним и нижним пороговыми значениями и формируют четыре первичных логических сигнала так, что первый из них принимает значение логической «1», если сигнал напряжения, соответствующий току в обмотке А, превосходит заданное верхнее пороговое значение, и значение логического «0» в противном случае, второй из них принимает значение логической «1», если сигнал напряжения, соответствующий току в обмотке В, превосходит заданное верхнее пороговое значение, и значение логического «0» в противном случае, третий из них принимает значение логической «1», если сигнал напряжения, соответствующий току в обмотке А, имеет значение ниже заданного нижнего порогового значения, и значение логического «0» в противном случае, четвертый из них принимает значение логической «1», если сигнал напряжения, соответствующий току в обмотке В, имеет значение ниже заданного нижнего порогового значения, и значение логического «0» в противном случае. В зависимости от полученных значений первичных логических сигналов формируют четыре вторичных логических сигнала таким образом, что первый из них принимает значение логической «1», если первый и второй первичные логические сигналы имеют значение логической «1», и значение логического «0» в противном случае. Второй из них принимает значение логической «1», если первый и четвертый первичные логические сигналы имеют значение логической «1», и значение логического «0» в противном случае. Третий из них принимает значение логической «1», если третий и четвертый первичные логические сигналы имеют значение логической «1», и значение логического «0» в противном случае. Четвертый из них принимает значение логической «1», если второй и третий первичные логические сигналы имеют значение логической «1» и значение логического «0» в противном случае. В зависимости от полученных значений вторичных логических сигналов формируют сигнал ступенчатого напряжения, каждое стационарное значение которого соответствует одному из четырех возможных состояний установившихся значений токов в обмотках шагового двигателя. А, если значения всех четырех вторичных логических сигналов одновременно имеют значение логического «0», формируют стационарное значение сигнала ступенчатого напряжения, соответствующее этому переходному состоянию электропривода.
Одним из возможных решений по формированию сигнала ступенчатого напряжения является такое. Значение сигнала ступенчатого напряжения формируют равным максимально возможному уровню ступенчатого напряжения, если значение первого вторичного логического сигнала логическая «1». Значение сигнала ступенчатого напряжения на данном шаге формируют равным 1/2 максимально возможного уровня ступенчатого напряжения, если значение второго вторичного логического сигнала логическая «1». Значение сигнала ступенчатого напряжения на данном шаге формируют равным 1/4 максимально возможного уровня ступенчатого напряжения, если значение третьего вторичного логического сигнала логическая «1». Значение сигнала ступенчатого напряжения на данном шаге формируют равным 1/8 максимально возможного уровня ступенчатого напряжения, если значение четвертого вторичного логического сигнала логическая «1». Если значения всех четырех вторичных логических сигналов одновременно имеют значение логического «0», формируют значение сигнала ступенчатого напряжения, равное минимально возможному уровню ступенчатого напряжения.
Для решения задачи изобретения в устройство введены два датчика тока, два источника опорного напряжения и четыре компаратора, причем первые входы первого и третьего компараторов соединены с выходом датчика тока в обмотке А, а первые входы второго и четвертого компараторов соединены с выходом датчика тока в обмотке В. Вторые входы первого и второго компараторов соединены в выходом первого источника опорного напряжения, а вторые входы третьего и четвертого компараторов соединены с выходом второго источника опорного напряжения. Выходы первого, второго, третьего и четвертого компараторов соединены соответственно с первым, вторым, третьим и четвертым входами блока формирования ступенчатого напряжения, выход которого является телеметрическим выходом устройства.
Одно из возможных исполнений устройства отличается тем, что в блок формирования ступенчатого напряжения дополнительно введены четыре логических элемента 2И и операционный усилитель, а четыре резистивных делителя напряжения объединены в R-2R матрицу. При этом, первые входы первого и второго логических элементов 2И соединены с первым входом блока формирования ступенчатого напряжения. Первые входы третьего и четвертого логических элементов 2И соединены с третьим входом блока формирования ступенчатого напряжения. Вторые входы первого и четвертого логических элементов 2И соединены со вторым входом блока формирования ступенчатого напряжения. Вторые входы второго и третьего логических элементов 2И соединены с четвертым входом блока формирования ступенчатого напряжения. Выходы логических элементов 2И соединены соответственно с первыми выводами первого, второго, третьего и четвертого резистивных делителей напряжения. Средний вывод первого резистивного делителя напряжения соединен с неинвертирующим входом операционного усилителя. Второй вывод первого резистивного делителя напряжения соединен со средним выводом второго резистивного делителя напряжения, второй вывод которого соединен со средним выводом третьего резистивного делителя напряжения, второй вывод которого соединен со средним выводом четвертого резистивного делителя напряжения, второй вывод которого соединен с отрицательным выводом источника питания. Причем выход операционного усилителя соединен с его инвертирующим входом и является выходом блока формирования ступенчатого напряжения.
Второе возможное исполнение устройства отличается тем, что в блок формирования ступенчатого напряжения дополнительно введены четыре логических элемента 2И, операционный усилитель, третий источник опорного напряжения и четыре полевых транзистора, а четыре резистивных делителя напряжения образованы каждый резистором, соединенным со стоком соответствующего полевого транзистора и резистором обратной связи. При этом, первые входы первого и второго логических элементов 2И соединены с первым входом блока формирования ступенчатого напряжения, первые входы третьего и четвертого логических элементов 2И соединены с третьим входом блока формирования ступенчатого напряжения. Вторые входы первого и четвертого логических элементов 2И соединены со вторым входом блока формирования ступенчатого напряжения. Вторые входы второго и третьего логических элементов 2И соединены с четвертым входом блока формирования ступенчатого напряжения, выходы логических элементов 2И соединены соответственно с первыми выводами первого, второго, третьего и четвертого резистивных делителей напряжения. Выходы логических элементов 2И соединены соответственно с затворами первого, второго, третьего и четвертого полевых транзисторов, средние выводы которых соединены между собой, а также с инвертирующим входом операционного усилителя и с первым выводом резистора обратной связи. Второй вывод резистора обратной связи соединен с выходом операционного усилителя, являющегося выходом блока формирования ступенчатого напряжения. Неинвертирующий вход операционного усилителя соединен с выходом третьего источника опорного напряжения, величина которого выбирается равной 1/32 максимально возможного уровня ступенчатого напряжения.
Третье возможное исполнение устройства отличается тем, что в блок формирования ступенчатого напряжения дополнительно введены четыре логических элемента 2И-НЕ с открытым стоком, операционный усилитель и третий источник опорного напряжения. Четыре резистивных делителя напряжения образованы каждый резистором, соединенным с выходом соответствующего логического элемента 2И-НЕ, и резистором обратной связи. При этом, первые входы первого и второго логических элементов 2И-НЕ соединены с первым входом блока формирования ступенчатого напряжения. Первые входы третьего и четвертого логических элементов 2И-НЕ соединены с третьим входом блока формирования ступенчатого напряжения. Вторые входы первого и четвертого логических элементов 2И-НЕ соединены со вторым входом блока формирования ступенчатого напряжения. Вторые входы второго и третьего логических элементов 2И-НЕ соединены с четвертым входом блока формирования ступенчатого напряжения, Выходы логических элементов 2И-НЕ соединены соответственно с первыми выводами первого, второго, третьего и четвертого резистивных делителей напряжения, средние выводы которых соединены между собой, а также с инвертирующим входом операционного усилителя и с первым выводом резистора обратной связи. Второй вывод резистора обратной связи соединен с выходом операционного усилителя, являющегося выходом блока формирования ступенчатого напряжения. Неинвертирующий вход операционного усилителя соединен с выходом третьего источника опорного напряжения, величина которого выбирается равной 1/32 максимально возможного уровня ступенчатого напряжения.
Сущность предлагаемого технического решения поясняется чертежами.
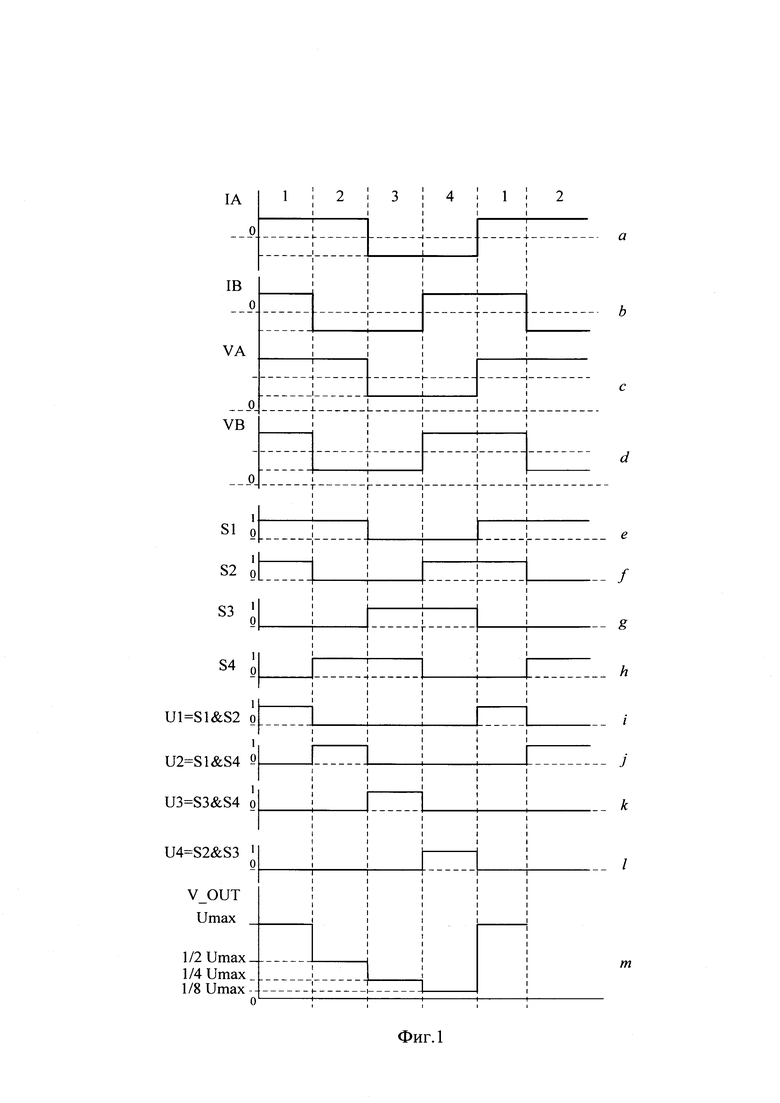
Фиг. 1. Схема формирования сигналов, обеспечивающая получение сигнала ступенчатого напряжения, позволяющего идентифицировать состояние ШД после совершения очередного шага.
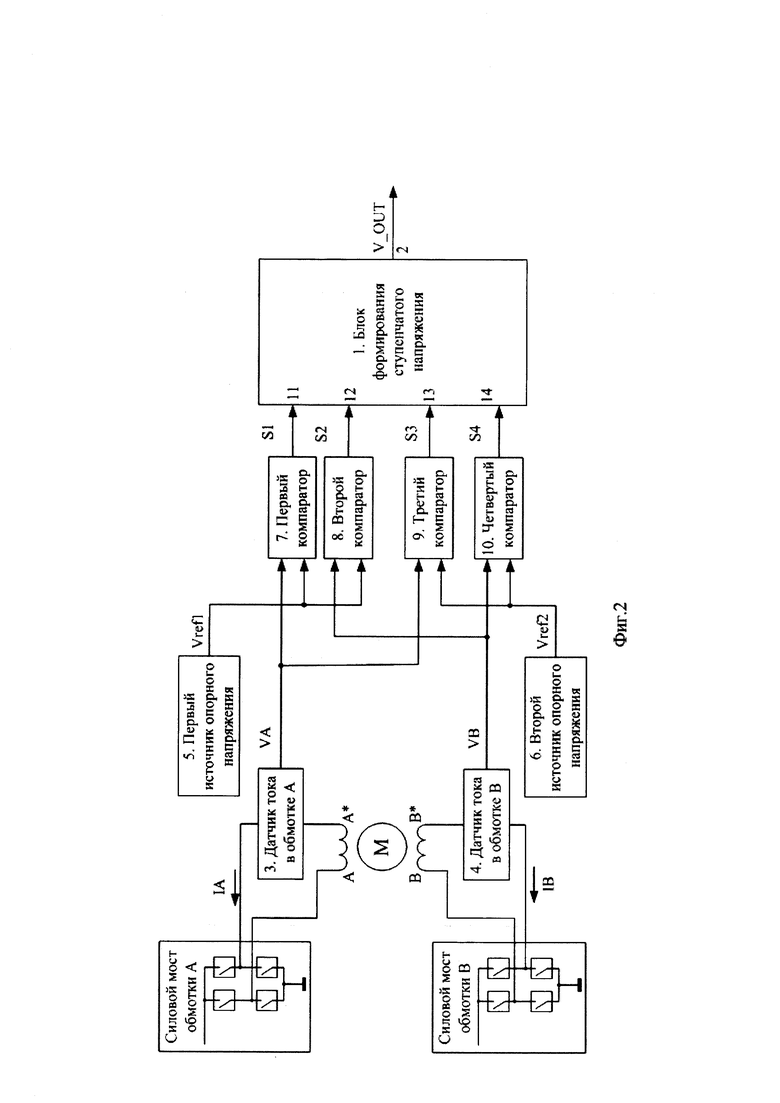
Фиг. 2. Функциональная схема устройства для контроля работы электропривода на основе двухобмоточного шагового двигателя, работающего в полношаговом режиме.
Фиг. 3. Электрическая принципиальная схема блока формирования ступенчатого напряжения, использующего резистивную матрицу R-2R для формирования сигнала ступенчатого напряжения, форма которого приведена на фиг. 1.
Фиг. 4. Электрическая принципиальная схема варианта исполнения блока формирования ступенчатого напряжения, выходной каскад которого построен с использованием полевых транзисторов.
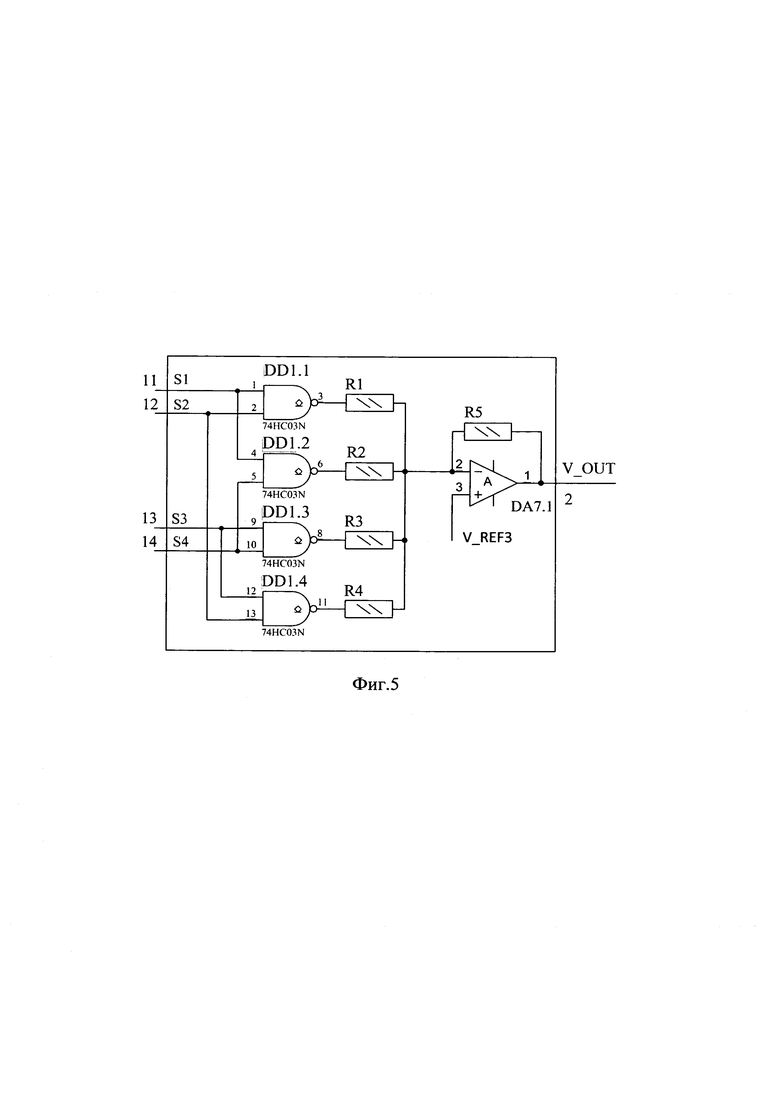
Фиг. 5. Электрическая принципиальная схема варианта исполнения блока формирования ступенчатого напряжения, построенного на основе логических элементов 2И-НЕ.
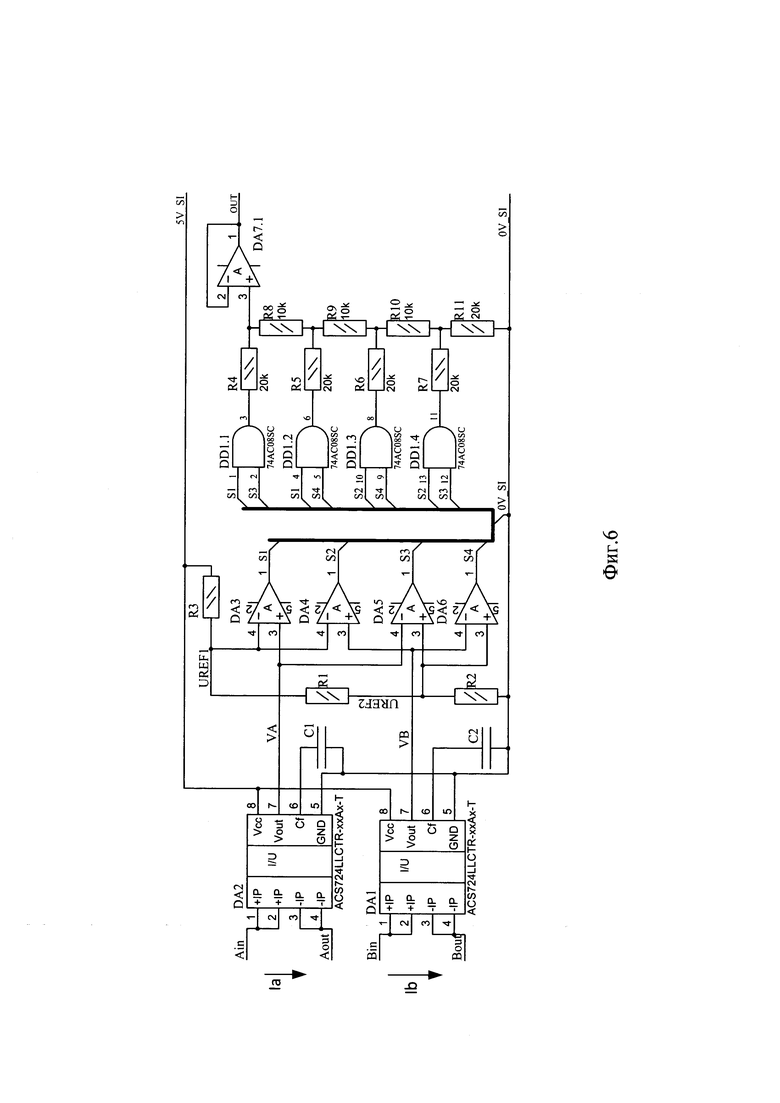
Фиг. 6. Пример электрической принципиальной схемы устройства для контроля работы электропривода, в составе которого применяется блок формирования ступенчатого напряжения, использующий резистивную матрицу R-2R.
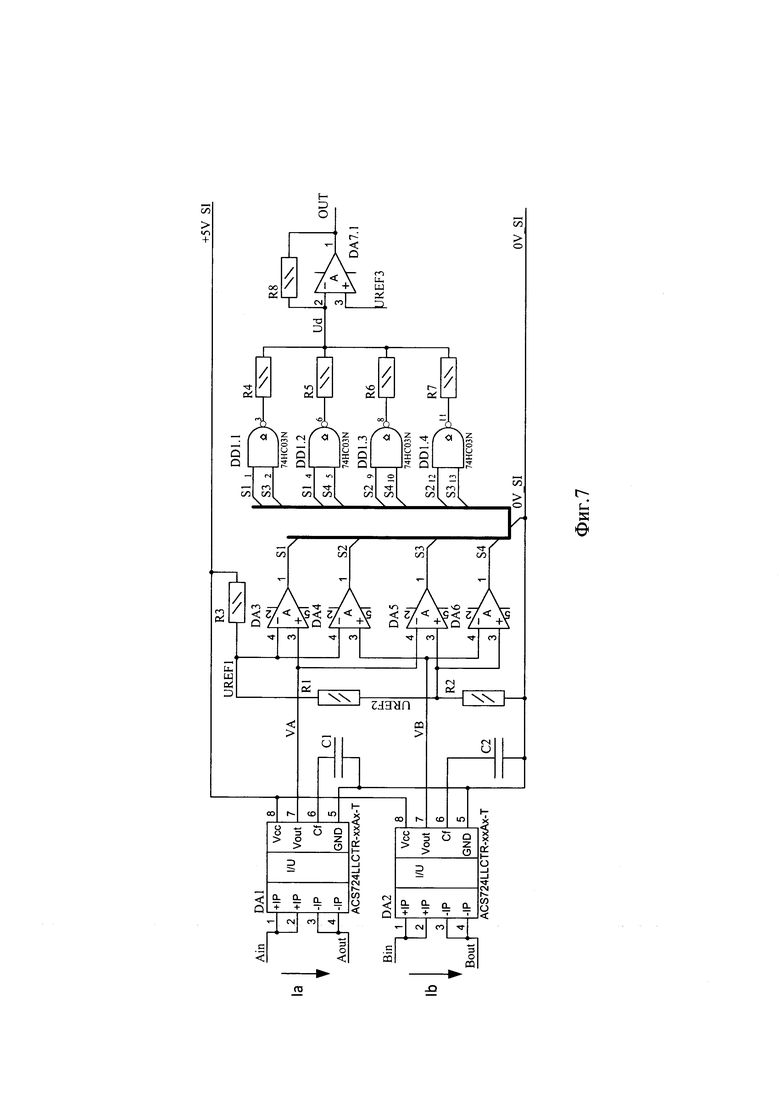
Фиг. 7. Пример электрической принципиальной схемы устройства для контроля работы электропривода, в составе которого применяется блок формирования ступенчатого напряжения, построенный на основе логических элементов 2И-НЕ.
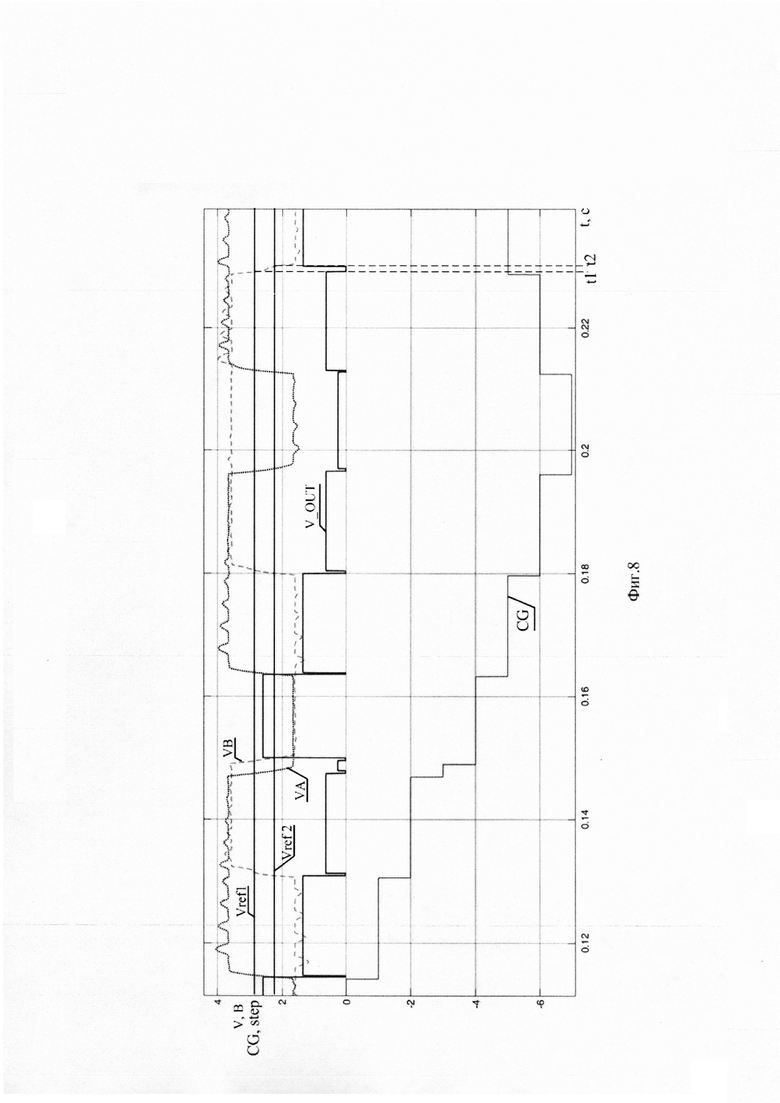
Фиг. 8. Результаты компьютерного моделирования работы устройства для контроля работы электропривода, электрическая принципиальная схема которого приведена на фиг. 6.
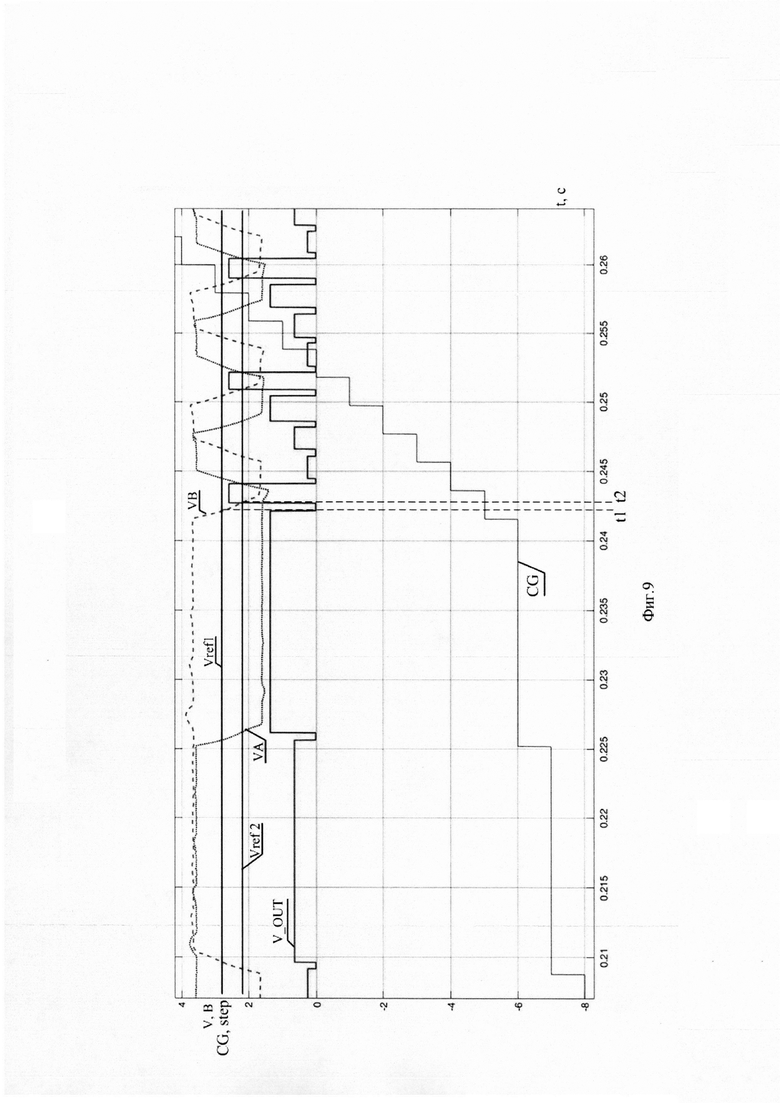
Фиг. 9. Пример результатов компьютерного моделирования работы устройства для контроля работы электропривода, электрическая принципиальная схема которого приведена на фиг. 6, при отработке участка типовой циклограммы.
Физическую и логическую основы предлагаемого способа контроля работы электропривода, а также последовательность операций, осуществляемых при формировании сигнала ступенчатого напряжения, каждое стационарное значение которого соответствует одному из четырех возможных состояний установившихся значений токов в обмотках шагового двигателя, поясняет схема формирования сигналов, приведенная на фиг. 1.
Работа электропривода на основе двухобмоточного ШД в полношаговом режиме подробно описана в разных литературных источниках (см., например, [7]). Из этих источников известно, что в этом режиме управление фазами осуществляется с перекрытием: две фазы включены в одно и то же время. Такой режим в англоязычной литературе называют "two-phase-on" full step или просто full step mode. При этом для вращения ротора ШД в одну сторону производится поочередная смена направления тока в фазах А и В, как это показано на фиг. 1 а и b. После последовательного перебора четырех возможных сочетаний направлений токов в двух фазах, эта картина циклически повторяется (при вращении ротора в одном направлении). Для изменения направления вращения ротора при совершении очередного шага реверс тока осуществляется в той же фазе, в которой он был произведен на предыдущем шаге. Таким образом, четыре возможных сочетания направлений токов в обмотках ШД, полностью характеризуют изменение состояния ШД. И, если отслеживать изменение этих состояний, можно достоверно контролировать работу электропривода. Предлагаемый способ как раз позволяет следить за изменением этих четырех возможных состояний токов в обмотках ШД и формировать сигнал, который в каждый момент времени характеризует состояние электропривода и изменение этого состояния при совершении очередного шага.
Предлагаемый способ контроля использует свойство неразрывности тока в индуктивности. Для удобства анализа работы привода биполярные сигналы токов IA и IB (см. фиг. 1 а и b) в обмотках преобразуются в однополярные сигналы соответствующих напряжений VA и VB (см. фиг. 1 с и d). Далее формируют четыре первичных логических сигнала S1, S2, S3 и S4 (см. фиг. 1 e, f, g, и h), так что первый из них S1 принимает значение логической «1», если сигнал напряжения VA, соответствующий току в обмотке А, превосходит заданное верхнее пороговое значение (что бывает, когда ток IA в обмотке А имеет положительное значение), и значение логического «0» в противном случае. Сигнал S2 принимает значение логической «1», если сигнал напряжения VB, соответствующий току IB в обмотке В, превосходит заданное верхнее пороговое значение, и значение логического «0» в противном случае. Третий сигнал S3 принимает значение логической «1», если сигнал напряжения VA, соответствующий току IA в обмотке А, имеет значение ниже заданного нижнего порогового значения (что соответствует отрицательному значению тока IA), и значение логического «0» в противном случае. Сигнал S4 принимает значение логической «1», если сигнал напряжения VB, соответствующий току IB в обмотке В, имеет значение ниже заданного нижнего порогового значения (что соответствует отрицательному значению тока IB), и значение логического «0» в противном случае.
Затем формируют последовательность четырех вторичных логических сигналов U1, U2, U3 и U4 (см. фиг. 1 i, j, k и l) таким образом, что первый из них U1 принимает значение логической «1», если первый и второй первичные логические сигналы S1 и S2 имеют значение логической «1», и значение логического «0» в противном случае. Второй из них U2 принимает значение логической «1», если первый и четвертый первичные логические сигналы S1 и S4 имеют значение логической «1», и значение логического «0» в противном случае. Третий из них U3 принимает значение логической «1», если третий и четвертый первичные логические сигналы S3 и S4 имеют значение логической «1», и значение логического «0» в противном случае. Четвертый вторичный логический сигнал U4 принимает значение логической «1», если второй и третий первичные логические сигналы S2 и S3 имеют значение логической «1» и значение логического «0» в противном случае. Четыре вторичных логических сигнала U1, U2, U3 и U4 полностью характеризуют четыре возможных состояния направлений токов в обмотках ШД.
Для удобства анализа и передачи полученной информации о состоянии привода в зависимости от полученных значений вторичных логических сигналов формируют сигнал ступенчатого напряжения V_OUT (см. фиг. 1 m), каждое стационарное значение которого соответствует одному из четырех возможных состояний установившихся значений токов в обмотках шагового двигателя. А, если значения всех четырех вторичных логических сигналов U1, U2, U3 и U4 одновременно имеют значение логического «0», формируют стационарное значение сигнала ступенчатого напряжения, соответствующее этому переходному состоянию электропривода (на схеме фиг. 1 переходные состояния не показаны).
Формирование уровней сигнала ступенчатого напряжения V_OUT можно производить в зависимости от удобства последующего анализа этого сигнала и простоты реализации операции его формирования. На фиг. 1 m показан пример формирования сигнала ступенчатого напряжения. В этом случае формируемые четыре уровня сигнала V_OUT будут принимать значения Umax, 1/2Umax, 1/4Umax и 1/8Umax (где Umax -напряжение питания схемы формирования сигнала ступенчатого напряжения).
Анализ сформированного сигнала ступенчатого напряжения позволяет определить количество выполненных шагов ШД, направление вращения выходного вала электропривода, частоту шагов (а, значит, среднюю скорость вращения) и изменение угла поворота выходного вала во время работы электропривода, т.е. обеспечить контроль его работы.
Для реализации предлагаемого способа было разработано устройство для контроля работы электропривода на основе двухобмоточного шагового двигателя, работающего в полношаговом режиме. Функциональная схема устройства приведена на фиг. 2. Устройство содержит (см. фиг. 2) блок формирования ступенчатого напряжения 1, включающий четыре резистивных делителя напряжения и имеющий телеметрический выход 2, а также два датчика тока 3 и 4, два источника опорного напряжения 5 и 6 и четыре компаратора 7, 8, 9 и 10. Первые входы первого и третьего компараторов 7 и 9 соединены с выходом датчика тока 3 в обмотке А. Первые входы второго и четвертого компараторов 8 и 10 соединены с выходом датчика тока 4 в обмотке В. Вторые входы первого и второго компараторов 7 и 9 соединены с выходом первого источника опорного напряжения 5. Вторые входы третьего и четвертого компараторов 8 и 10 соединены с выходом второго источника опорного напряжения 6. Выходы первого, второго, третьего и четвертого компараторов 7, 8, 9 и 10 соединены соответственно с первым, вторым, третьим и четвертым входами 11, 12, 13 и 14 блока формирования ступенчатого напряжения 1, выход которого 2 является телеметрическим выходом устройства.
Контроль тока в обмотках ШД осуществляется датчиками тока 3 и 4. Учитывая тенденцию современной техники к миниатюризации, снижению стоимости и расширению универсальности применения, наиболее эффективным решением являются датчики тока на основе микросхем с интегрированными элементами Холла. Для двигателя с номинальным током обмоток 5А, в качестве такого датчика может быть применена микросхема ACS724LLCTR-10AB [8]. Напряжение на выходе микросхемы будет определяться выражением

где I - ток через датчик;
К=0,2 В/А - коэффициент преобразования
Uп=5В - напряжение питания датчика.
При использовании данного датчика тока сопротивление, вносимое в измеряемую цепь составляет не более 1.2 мОм. Полностью исключить разрыв измеряемой цепи можно применив бесконтактный датчик тока MLX91206 [9] позволяющий получить выходное напряжение в соответствии с выражением (1), при К=35 мВ/А.
Выходные сигналы датчиков тока в обмотках VA и VB поступают на входы компараторов 7-10, где сравниваются с опорными напряжениями Vref1 и Vref2 формируемыми первым 5 и вторым 6 источниками опорного напряжения. Причем
Vref1=Uп+К*Iпор, а
Vref2=Uп-К*Iпор.
Таким образом, первый и третий компараторы формируют на выходе логическую единицу в случае превышения выходным сигналом датчика тока в обмотке ШД верхнего порогового значения, второй и четвертый компараторы - при величине выходного сигнала датчика тока меньше нижнего порогового значения. В качестве компаратора может быть использована микросхема MIC7211 ВМ5 [10].
Выходные сигналы компараторов S1-S4 поступают на входы блока формирования ступенчатого напряжения 1.
Блок формирования ступенчатого напряжения, электрическая принципиальная схема которого приведена на фиг. 3, содержит четыре логических элемента 2И DD1.1-DD1.4, операционный усилитель DA7.1 и четыре резистивных делителя напряжения, объединенных в R-2R матрицу R1-R8. Первые входы первого и второго логических элементов 2И DD1.1 и DD1.2 соединены с первым входом блока формирования ступенчатого напряжения 11. Первые входы третьего и четвертого логических элементов 2И DD1.3 и DD1.4 соединены с третьим входом блока формирования ступенчатого напряжения 13. Вторые входы первого и четвертого логических элементов 2И DD1.1 и DD1.4 соединены со вторым входом блока формирования ступенчатого напряжения 12. Вторые входы второго и третьего логических элементов 2И DD1.2 и DD1.3 соединены с четвертым входом блока формирования ступенчатого напряжения 14. Выходы логических элементов 2И DD1.1-DD1.4 соединены соответственно с первыми выводами первого R1, R5, второго R2,R6, третьего R3, R7 и четвертого R4, R8 резистивных делителей напряжения. Средний вывод первого резистивного делителя напряжения R1, R5 соединен с неинвертирующим входом операционного усилителя DA7.1. Второй вывод первого резистивного делителя напряжения R1, R5 соединен со средним выводом второго резистивного делителя напряжения R2, R6, второй вывод которого соединен со средним выводом третьего резистивного делителя напряжения R3, R7, второй вывод которого соединен со средним выводом четвертого резистивного делителя напряжения R4, R5, второй вывод которого соединен с отрицательным выводом источника питания. Выход операционного усилителя DA7.1 соединен с его инвертирующим входом и является выходом блока формирования ступенчатого напряжения 2.
Логические элементы могут быть реализованы на одной микросхеме 1554ЛИ1ТБМ [11], содержащей четыре логических элемента 2И, каждый из которых выполнен с двухтактным выходом. Это позволяет использовать для формирования ступенчатого напряжения, резистивные делители, соединенные в матрицу R-2R. Выходной сигнал снимаемый с общей точки резисторов R1, R5 определяется выражением:
Uвых=Uпит*Σ(Ui*1/2n-i), или
Uвых=Uпит*(U1*1/2+U2*1/4+U3*/8+U4*1/16), где
Ui - логический сигнал на i-ом выходе, принимающий значения 0 или 1;
Uпит=5В - напряжение питания микросхемы DD1.
Выходной сигнал с резистивной матрицы поступает на буферный усилитель DA7.1 с единичным коэффициентом усиления. Для более полного использования динамического диапазона телеметрического канала и, как следствие, повышения отношения сигнал/шум буферный усилитель может быть преобразован в неинвертирующий усилитель с необходимым коэффициентом усиления например как показано на c.11 в [12].
Тогда предыдущие выражения можно будет переписать в следующем виде:
Uвых=Uпит*Ku*Σ(Ui*1/2n-i), или
Uвых=Uпит*Ku*(U1*1/2+U2*1/4+U3*/8+U4*1/16),
где Ku - коэффициент усиления неинвертирующего усилителя, который может быть рассчитан в соответствии с выражениями приведенными на стр. 10 в [12].
В качестве операционного усилителя для построения описанных выше усилителей может быть использован операционный усилитель MCP6V02-E/SN [13].
Другая электрическая принципиальная схема возможного исполнения блока формирования ступенчатого напряжения приведена на фиг. 4. Блок формирования ступенчатого напряжения в этом исполнении содержит (см. фиг. 4) четыре логических элемента 2И DD1.1-DD1.4, операционный усилитель DA7.1, третий источник опорного напряжения V_REF3 (на схеме не показан) и четыре полевых транзистора VT1-VT4 и четыре резистивных делителя напряжения R1-R5, каждый из которых образован резистором R1-R4, соединенным со стоком соответствующего полевого транзистора VT1-VT4, и резистором обратной связи R5. Первые входы первого и второго логических элементов 2И DD1.1 и DD1.2 соединены с первым входом блока формирования ступенчатого напряжения 11. Первые входы третьего и четвертого логических элементов 2И DD1.3 и DD1.4 соединены с третьим входом блока формирования ступенчатого напряжения 13. Вторые входы первого и четвертого логических элементов 2И DD1.1 и DD1.4 соединены со вторым входом блока формирования ступенчатого напряжения 12. Вторые входы второго и третьего логических элементов 2И DD1.2 и DD1.3 соединены с четвертым входом блока формирования ступенчатого напряжения 14. Выходы всех логических элементов 2И DD1.1-DD1.4 соединены соответственно с затворами первого, второго, третьего и четвертого полевых транзисторов VT1-VT4, истоки которых соединены между собой, а стоки соединены соответственно с первыми выводами первого, второго, третьего и четвертого резисторов R1, R2, R3 и R4. Вторые выводы первого, второго, третьего и четвертого резисторов R1, R2, R3 и R4 соединены между собой, а также с инвертирующим входом операционного усилителя DA7.1 и с первым выводом резистора обратной связи R5, второй вывод которого соединен с выходом операционного усилителя, являющегося выходом блока формирования ступенчатого напряжения 2. Неинвертирующий вход операционного усилителя DA7.1 соединен с выходом третьего источника опорного напряжения, величина которого V_REF3 выбирается равной 1/32 максимально возможного уровня ступенчатого напряжения. Такая величина опорного напряжения определяется исходя из того, что максимальный коэффициент усиления усилителя с параметрами, показанными на Figure 2-35 (страница 2.33 в [14]) при замыкании одного ключа (что соответствует нормальной работе драйвера), не превышает 16. Для обеспечения диагностики аварийных состояний при замыкании четырех ключей коэффициент усиления усилителя будет равен 30, что при выбранном значении опорного напряжения не позволит переходить усилителю в режим насыщения.
В схеме, приведенной на фиг. 4, формирование сигнала ступенчатого напряжения выполняется с использованием усилителя с программируемым коэффициентом усиления, выполненного, например, как показано на Figure 2-35 (страница 2.33 в [14]). Для обеспечения необходимой точности в качестве ключей необходимо использовать NMOSFET транзисторы VT1-VT4 IRLML0060TRPbF [15] с малым сопротивлением RDS(on), не превышающем 116 мОм, при напряжении затвора 4,5 В. При указанных параметрах ключа (RDS(on) max) вносимая им относительная погрешность даже для минимального значения сопротивления 625 Ом, приведенного в [14], составит ΔR/R=0.116/625=0.000186. Источник опорного напряжения V_REF3 может быть выполнен на резистивном делителе.
На электрической принципиальной схеме, приведенной на фиг. 5, предлагается еще один вариант возможного исполнения блока формирования ступенчатого напряжения. Блок формирования ступенчатого напряжения в этом исполнении содержит (см. фиг. 5) четыре логических элемента 2И-НЕ с открытым стоком DD1.1-DD1.4, операционный усилитель DA7.1, третий источник опорного напряжения V_REF3 (на схеме не показан) и четыре резистивных делителя напряжения R1-R5, каждый из которых образован резистором R1-R4, соединенным с выходом соответствующего логического элемента 2И-НЕ DD1.1-DD1.4, и резистором обратной связи R5. Первые входы первого и второго логических элементов 2И-НЕ DD1.1 и DD1.2 соединены с первым входом блока формирования ступенчатого напряжения 11. Первые входы третьего и четвертого логических элементов 2И-НЕ DD1.3 и DD1.4 соединены с третьим входом блока формирования ступенчатого напряжения 13. Вторые входы первого и четвертого логических элементов 2И-НЕ DD1.1 и DD1.4 соединены со вторым входом блока формирования ступенчатого напряжения 12. Вторые входы второго и третьего логических элементов 2И-НЕ DD1.2 и DD1.3 соединены с четвертым входом блока формирования ступенчатого напряжения 14. Выходы логических элементов 2И-НЕ DD1.1 и DD1.2 соединены соответственно с первыми выводами первого, второго, третьего и четвертого резисторов R1, R2, R3 и R4, вторые выводы которых соединены между собой, а также с инвертирующим входом операционного усилителя DA7.1 и с первым выводом резистора обратной связи R5, второй вывод которого соединен с выходом операционного усилителя DA7.1, являющегося выходом блока формирования ступенчатого напряжения 2. Неинвертирующий вход операционного усилителя DA7.1 соединен с выходом третьего источника опорного напряжения, величина которого V_REF3 выбирается равной 1/32 максимально возможного уровня ступенчатого напряжения.
В исполнении блока формирования ступенчатого напряжения, показанного на схеме фиг. 5, вместо элементов 2И (применяемых в схемах на фиг. 3 и фиг. 4) используются элементы 2И-НЕ с открытым стоком, выполненные на микросхеме 74HC03D [16]. Такое решение позволяет отказаться от установки дополнительных транзисторов VT1-VT4 за счет использования вместо них транзисторов выходного каскада применяемой микросхемы.
На фиг. 6 приведен пример электрической принципиальной схемы устройства для контроля работы электропривода, в составе которого применяется блок формирования ступенчатого напряжения, использующий резистивную матрицу R-2R. Другой пример электрической принципиальной схемы устройства для контроля работы электропривода, в составе которого применяется блок формирования ступенчатого напряжения, построенный на основе логических элементов 2И-НЕ, показан на фиг. 7.
Для подтверждения работоспособности и эффективности заявляемого технического решения было проведено компьютерное моделирование работы показанной на фиг. 6 электрической принципиальной схемы устройства, реализующего предлагаемый способ. При этом использовался программный пакет Micro-Cap (Microcomputer Circuit Analysis Program) для компьютерного моделирования аналоговых и цифровых электронных устройств [17, 18]. Компьютерное моделирование работы электрической принципиальной схемы устройства проводилось путем подачи на ее входы экспериментальных значений выходных сигналов датчиков тока в обмотках А и В ШД, которые обозначены на схемах фиг. 1 и 2 VA и VB соответственно.
Результаты компьютерного моделирования представлены на осциллограммах, приведенных на фиг. 8 и 9. На этих графиках приведены процессы изменения выходных сигналов датчиков тока VA и VB, а также выходного сигнала устройства V_OUT и заданного программного сигнала CG (в шагах), который должен был отрабатывать выходной вал электропривода. На осциллограммах фиг. 8 и 9 показаны результаты функционирования устройства при отработке двух типовых участков задаваемой циклограммы поворота выходного вала электропривода, которые соответствуют разным направлениям вращения и частотам следования шагов.
На этих графиках процесс изменения выходного сигнала VA датчика тока в обмотке А показан пунктирной линией, а процесс изменения выходного сигнала VB датчика тока в обмотке В показан штриховой линией. Выходной сигнал моделируемого устройства V_OUT показан толстой сплошной линией, а программный сигнал отрабатываемой циклограммы CG - тонкой сплошной линией. На этих же графиках показаны верхнее Vref1 и нижнее Vref2 пороговые значения. При моделировании работы заявляемого устройства на его входы подавались записанные при проведении эксперимента сигналы с выходов датчиков тока в обмотках А и В. Сформированный компьютерной моделью устройства выходной сигнал отражает работу электропривода на выбранном участке типовой циклограммы.
На осциллограммах, представленных на фиг. 8, выбран участок циклограммы, где шаги выполняются приводом с относительно низкой частотой, что обеспечивает наличие достаточно продолжительных (около 16 мс) стационарных участков выходного сигнала ступенчатого напряжения V_OUT. На графиках видно, что при вращении вала привода в отрицательном направлении, наблюдается последовательное уменьшение соседних уровней сигнала ступенчатого напряжения с однократным увеличением уровня до максимально возможного значения после совершения четырех шагов (см., например, участок около t=0.15 с). При вращении вала в положительном направлении возникает обратная картина - соседние уровни сигнала ступенчатого напряжения возрастают (см. участок процесса после 0.2 с). Каждому изменению стационарного уровня ступенчатого напряжения предшествует непродолжительный (от 0.2 до 0.9 мс) участок по времени, где V_OUT=0. Этот участок возникает на переходном участке, когда происходит реверс тока в активной фазе ШД и выходной сигнал датчика тока в этой фазе изменяется между нижним и верхним пороговыми значениями (см., например, отрезок времени [t1,t2]). Длительность этого участка обусловлена скоростью и характером изменения тока в активной фазе и установленными пороговыми значениями.
Процессы, представленные в виде осциллограмм на фиг. 9, отражают поведение наблюдаемых параметров на участке циклограммы, где присутствует отрезок времени, на котором выходной вал привода вращается с максимальной скоростью, установленной для моделируемого электропривода (см. участок процесса после 0.24 с). Здесь вращение вала происходит в положительном направлении, о чем свидетельствует последовательное увеличение соседних уровней ступенчатого напряжения с переходом после каждых четырех шагов к минимальному формируемому уровню. Формированию каждого нового стационарного уровня ступенчатого напряжения всегда предшествует (как и в соответствующем графике изменения сигнала V_OUT на фиг. 8) участок с нулевым значением выходного сигнала устройства (см., например, отрезок времени [t1,t2]).
Приведенные на фиг. 8, 9 результаты компьютерного моделирования работы предлагаемого устройства, реализующего заявляемый способ, подтверждают работоспособность и эффективность предложенного технического решения. Расширение функциональных возможностей и повышение достоверности контроля достигается, в первую очередь, за счет того, что в заявленном техническом решении контроль работы электропривода осуществляется по сигналам с датчиков тока в обмотках ШД. Тогда как, в техническом решении-прототипе [4] контроль правильности работы электропривода осуществляется по сигналам напряжения, подаваемого драйвером на обмотки ШД. А в этом случае, если в какой-либо обмотке ШД произойдет обрыв, то устройство контроля не отреагирует на этот отказ. Таким образом, решение-прототип позволяет контролировать, по сути, только правильность подачи напряжения на обмотки ШД. В то время как предлагаемое техническое решение обеспечивает контроль работы электропривода при воздействии подаваемого на обмотки ШД напряжения, так как в нем осуществляется контроль тока в обмотках, контроль правильности его направления и достаточности величины для совершения шагов в нужном направлении.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. RU 2273944 С2. Система контроля работы бесщеточных двигателей 10.04.2006, бюл. №10.
2. ЕР 1356583 A1. SYSTEME DE CONTROLE DE MOTEURS SANS BALAIS, 13.10.2010. Bulletin 2010/41.
3. RU 2475933 С2. 20.03.2012. Бюл .№8. ЧЕТЫРЕХТАКТНЫЙ РЕВЕРСИВНЫЙ РАСПРЕДЕЛИТЕЛЬ ИМПУЛЬСОВ ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ С АВТОМАТИЧЕСКОЙ КОРРЕКЦИЕЙ ОДИНОЧНЫХ ОШИБОК.
4. RU 2638522 С2. 14.12.2017. Бюл. №35. ШАГОВЫЙ ЭЛЕКТРОПРИВОД.
5. A4989-Datasheet.pdf, Inc. www.allegromicro.com
6. ТМС262 DATASHEET (Rev. 2.14 / 2016-JUL-14). www.trinamic.com
7. Емельянов А.В., Шилин А.Н. Шаговые двигатели: учебное пособие. ВолгГТУ. Волгоград, 2005. - 48 с.
8. https://www.allegromicro.com/~/media/Files/Datasheets/ACS724-Datasheet.ashx
9. https://www.melexis.com/-/media/files/documents/datasheets/mlx91206-datasheet-melexis.pdf
10. http://ww1.microchip.com/downloads/en/DeviceDoc/mic7211.pdf
11. АЕЯР.431200.182-08ТУ
12. Алексенко А.Г., Коломбет Е.А., Стародуб Г.И. Применение прецизионных аналоговых ИС. - М.: Радио и связь, 1981. - 10,11 с.
13. 22058c.pdf www.microchip.com/product/enMCP6V02
14. https://www.analog.com/media/en/training-seminars/design-handbooks/Op-Amp-Applications/Section2.pdf
15. https://www.infineom.com/cms/en/power/mosfet/20v-100v-n-chanel-smal-power-mosfet/irlm10060/
16. https://assets.nexperia.com/documents/data-sheet/74HC_HCT03.pdf
17. www.spectrum-soft.com
18. Амелина M.A., Амелин C.A.. Программа схемотехнического моделирования Micro-Cap. Версии 9, 10. - Смоленск, Смоленский филиал НИУ МЭИ, 2013. - 618 с., ил.

Изобретение относится к электротехнике и может быть использовано для контроля работы шагового привода, содержащего двухобмоточный шаговый двигатель (ШД), работающий в полношаговом режиме. Технический результат заключается в расширении функциональных возможностей и повышении достоверности телеметрического контроля работы электропривода. Технический результат достигается за счет контроля тока в обмотках, контроля правильности его направления и достаточности величины для совершения шагов в нужном направлении. Во время работы ШД непрерывно измеряют токи в каждой обмотке. Формируют два сигнала напряжения, соответствующие току в каждой обмотке. Сравнивают их с заданными верхним и нижним пороговыми значениями и формируют четыре первичных логических сигнала. В зависимости от полученных значений первичных логических сигналов формируют четыре вторичных логических сигнала, по полученным значениям которых формируют сигнал ступенчатого напряжения, каждое стационарное значение которого соответствует одному из четырех возможных состояний установившихся значений токов в обмотках шагового двигателя. А если значения всех четырех вторичных логических сигналов одновременно имеют значение логического «0», формируют стационарное значение сигнала ступенчатого напряжения, соответствующее этому переходному состоянию электропривода. 2 н. и 4 з.п. ф-лы, 9 ил.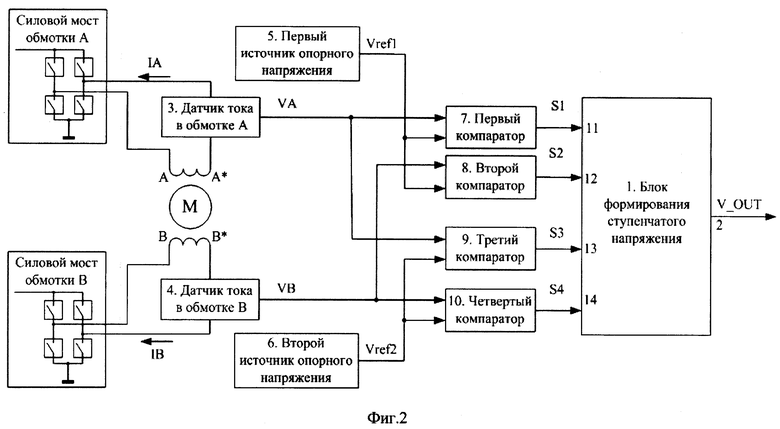
1. Способ контроля работы электропривода на основе двухобмоточного шагового двигателя, работающего в полношаговом режиме, включающий измерение параметров электропитания шагового двигателя и формирование сигнала ступенчатого напряжения, позволяющего контролировать работу электропривода, отличающийся тем, что во время работы шагового двигателя непрерывно измеряют токи в каждой обмотке, формируют два сигнала напряжения, соответствующие току в каждой обмотке, сравнивают их с заданными верхним и нижним пороговыми значениями и формируют четыре первичных логических сигнала так, что первый из них принимает значение логической «1», если сигнал напряжения, соответствующий току в обмотке А, превосходит заданное верхнее пороговое значение, и значение логического «0» в противном случае, второй из них принимает значение логической «1», если сигнал напряжения, соответствующий току в обмотке В, превосходит заданное верхнее пороговое значение, и значение логического «0» в противном случае, третий из них принимает значение логической «1», если сигнал напряжения, соответствующий току в обмотке А, имеет значение ниже заданного нижнего порогового значения, и значение логического «0» в противном случае, четвертый из них принимает значение логической «1», если сигнал напряжения, соответствующий току в обмотке В, имеет значение ниже заданного нижнего порогового значения, и значение логического «0» в противном случае, в зависимости от полученных значений первичных логических сигналов формируют четыре вторичных логических сигнала таким образом, что первый из них принимает значение логической «1», если первый и второй первичные логические сигналы имеют значение логической «1», и значение логического «0» в противном случае, второй из них принимает значение логической «1», если первый и четвертый первичные логические сигналы имеют значение логической «1», и значение логического «0» в противном случае, третий из них принимает значение логической «1», если третий и четвертый первичные логические сигналы имеют значение логической «1», и значение логического «0» в противном случае, четвертый из них принимает значение логической «1», если второй и третий первичные логические сигналы имеют значение логической «1» и значение логического «0» в противном случае, в зависимости от полученных значений вторичных логических сигналов формируют сигнал ступенчатого напряжения, каждое стационарное значение которого соответствует одному из четырех возможных состояний установившихся значений токов в обмотках шагового двигателя, а если значения всех четырех вторичных логических сигналов одновременно имеют значение логического «0», формируют стационарное значение сигнала ступенчатого напряжения, соответствующее этому переходному состоянию электропривода.
2. Способ контроля работы электропривода на основе двухобмоточного шагового двигателя по п. 1, отличающийся тем, что значение сигнала ступенчатого напряжения формируют равным максимально возможному уровню ступенчатого напряжения, если значение первого вторичного логического сигнала логическая «1», значение сигнала ступенчатого напряжения на данном шаге формируют равным 1/2 максимально возможного уровня ступенчатого напряжения, если значение второго вторичного логического сигнала логическая «1», значение сигнала ступенчатого напряжения на данном шаге формируют равным 1/4 максимально возможного уровня ступенчатого напряжения, если значение третьего вторичного логического сигнала логическая «1», значение сигнала ступенчатого напряжения на данном шаге формируют равным 1/8 максимально возможного уровня ступенчатого напряжения, если значение четвертого вторичного логического сигнала логическая «1», а если значения всех четырех вторичных логических сигналов одновременно имеют значение логического «0», формируют значение сигнала ступенчатого напряжения, равное минимально возможному уровню ступенчатого напряжения.
3. Устройство для контроля работы электропривода на основе двухобмоточного шагового двигателя, работающего в полношаговом режиме, содержащее блок формирования ступенчатого напряжения, включающий четыре резистивных делителя напряжения и имеющий телеметрический выход, отличающееся тем, что в него введены два датчика тока, два источника опорного напряжения и четыре компаратора, причем первые входы первого и третьего компараторов соединены с выходом датчика тока в обмотке А, первые входы второго и четвертого компараторов соединены с выходом датчика тока в обмотке В, вторые входы первого и второго компараторов соединены с выходом первого источника опорного напряжения, а вторые входы третьего и четвертого компараторов соединены в выходом второго источника опорного напряжения, выходы первого, второго, третьего и четвертого компараторов соединены соответственно с первым, вторым, третьим и четвертым входами блока формирования ступенчатого напряжения, выход которого является телеметрическим выходом устройства.
4. Устройство для контроля работы электропривода по п. 3, отличающееся тем, что в блок формирования ступенчатого напряжения дополнительно введены четыре логических элемента 2И и операционный усилитель, а четыре резистивных делителя напряжения объединены в R-2R матрицу, при этом первые входы первого и второго логических элементов 2И соединены с первым входом блока формирования ступенчатого напряжения, первые входы третьего и четвертого логических элементов 2И соединены с третьим входом блока формирования ступенчатого напряжения, вторые входы первого и четвертого логических элементов 2И соединены со вторым входом блока формирования ступенчатого напряжения, вторые входы второго и третьего логических элементов 2И соединены с четвертым входом блока формирования ступенчатого напряжения, выходы логических элементов 2И соединены соответственно с первыми выводами первого, второго, третьего и четвертого резистивных делителей напряжения, средний вывод первого резистивного делителя напряжения соединен с неинвертирующим входом операционного усилителя, второй вывод первого резистивного делителя напряжения соединен со средним выводом второго резистивного делителя напряжения, второй вывод которого соединен со средним выводом третьего резистивного делителя напряжения, второй вывод которого соединен со средним выводом четвертого резистивного делителя напряжения, второй вывод которого соединен с отрицательным выводом источника питания, причем выход операционного усилителя соединен с его инвертирующим входом и является выходом блока формирования ступенчатого напряжения.
5. Устройство для контроля работы электропривода по п. 3, отличающееся тем, что в блок формирования ступенчатого напряжения дополнительно введены четыре логических элемента 2И, операционный усилитель, третий источник опорного напряжения и четыре полевых транзистора, причем четыре резистивных делителя напряжения образованы каждый резистором, соединенным со стоком соответствующего полевого транзистора, и резистором обратной связи, тогда как первые входы первого и второго логических элементов 2И соединены с первым входом блока формирования ступенчатого напряжения, первые входы третьего и четвертого логических элементов 2И соединены с третьим входом блока формирования ступенчатого напряжения, вторые входы первого и четвертого логических элементов 2И соединены со вторым входом блока формирования ступенчатого напряжения, вторые входы второго и третьего логических элементов 2И соединены с четвертым входом блока формирования ступенчатого напряжения, а выходы всех логических элементов 2И соединены соответственно с затворами первого, второго, третьего и четвертого полевых транзисторов, истоки которых соединены между собой, а стоки соединены соответственно с первыми выводами первого, второго, третьего и четвертого резисторов, при этом вторые выводы первого, второго, третьего и четвертого резисторов соединены между собой, а также с инвертирующим входом операционного усилителя и с первым выводом резистора обратной связи, второй вывод которого соединен с выходом операционного усилителя, являющегося выходом блока формирования ступенчатого напряжения, и неинвертирующий вход операционного усилителя соединен с выходом третьего источника опорного напряжения, величина которого выбирается равной 1/32 максимально возможного уровня ступенчатого напряжения.
6. Устройство для контроля работы электропривода по п. 3, отличающееся тем, что в блок формирования ступенчатого напряжения дополнительно введены четыре логических элемента 2И-НЕ с открытым стоком, операционный усилитель и третий источник опорного напряжения, а четыре резистивных делителя напряжения образованы каждый резистором, соединенным с выходом соответствующего логического элемента 2И-НЕ, и резистором обратной связи, притом первые входы первого и второго логических элементов 2И-НЕ соединены с первым входом блока формирования ступенчатого напряжения, первые входы третьего и четвертого логических элементов 2И-НЕ соединены с третьим входом блока формирования ступенчатого напряжения, вторые входы первого и четвертого логических элементов 2И-НЕ соединены со вторым входом блока формирования ступенчатого напряжения, вторые входы второго и третьего логических элементов 2И-НЕ соединены с четвертым входом блока формирования ступенчатого напряжения, выходы логических элементов 2И-НЕ соединены соответственно с первыми выводами первого, второго, третьего и четвертого резисторов, вторые выводы которых соединены между собой, а также с инвертирующим входом операционного усилителя и с первым выводом резистора обратной связи, второй вывод которого соединен с выходом операционного усилителя, являющегося выходом блока формирования ступенчатого напряжения, а неинвертирующий вход операционного усилителя соединен с выходом третьего источника опорного напряжения, величина которого выбирается равной 1/32 максимально возможного уровня ступенчатого напряжения.
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2638522C2 |
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ ТОКА В ОБМОТКЕ ДВУХФАЗНОГО БИПОЛЯРНОГО ШАГОВОГО ДВИГАТЕЛЯ В ПОЛНОШАГОВОМ РЕЖИМЕ И ДРАЙВЕР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2708073C1 |
| EP 0458159 A1, 27.11.1991 | |||
| US 2006181237 A1, 17.08.2006 | |||
| Устройство для двухрежимного управления шаговым двигателем | 1986 |
|
SU1363416A1 |

