Изобретение относится к способу измерения толщины слоя земляного покрытия, в частности, при проложенных под землей газовых и нефтяных трубопроводах.
Проложенные под землей газовые и нефтяные трубопроводы должны быть, в соответствии с предписаниями закона, покрыты землей с минимальной толщиной слоя. При этом эксплуатационники трубопровода должны с периодическими интервалами проверять сохранение этой толщины слоя и устанавливать изменения покрытия. При этом обычно предполагается точность измерения примерно 10 см.
В настоящее время прохождение трубопровода обычно контролируется с помощью вертолетов с воздуха, и при наличии оптически-визуальных сомнительных результатов, толщина слоя оценивается на земле посредством измерения вручную.
Однако это не является непрерывным во времени измерением с высокой частотой облета, поскольку относительно дорогостоящие облеты с помощью вертолетов обычно осуществляется лишь каждые 2-4 недели или даже каждый квартал.
Кроме того, за счет эрозии почвы может происходить непрерывный снос земляного покрытия, так что не сохраняется заданная толщина покрытия, без возникновения оптически заметных изменений. Поэтому толщину слоя необходимо проверять с регулярными интервалами посредством обхода и измерений вручную.
Поэтому в основу изобретения положена задача создания способа, с помощью которого может быть упрощено контролирование толщины слоя.
Задача решена, согласно изобретению, с помощью способа, согласно пункту 1 формулы изобретения.
Предпочтительные варианты выполнения указаны в зависимых пунктах формулы изобретения.
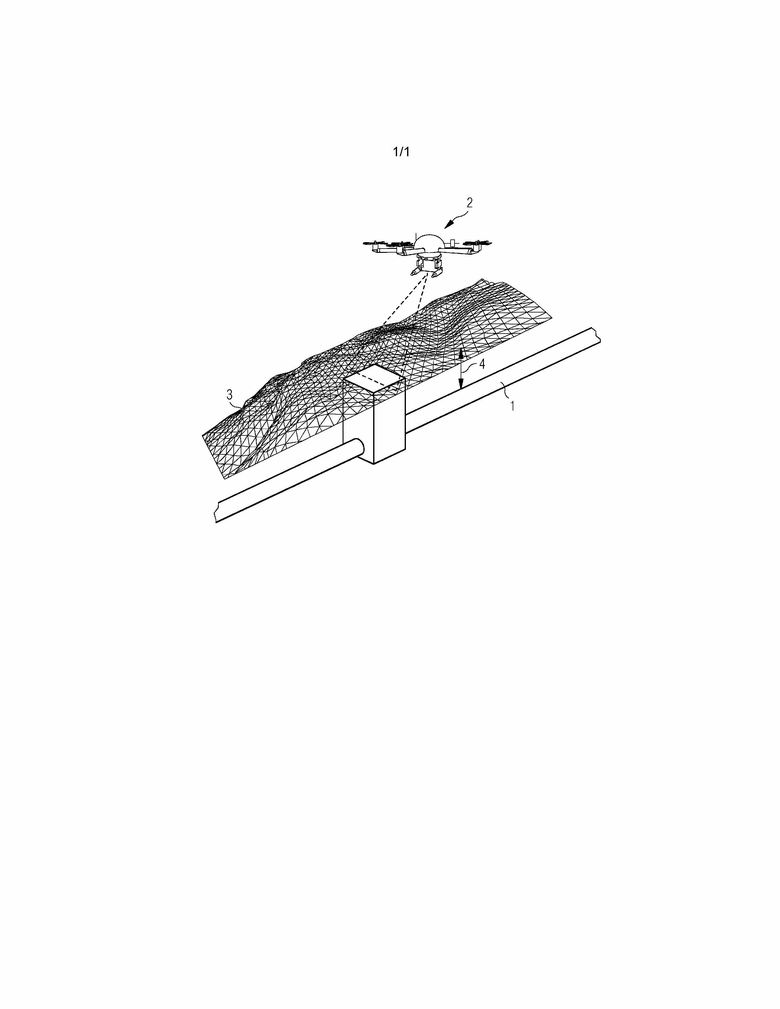
Ниже приводится более подробное пояснение изобретения со ссылками на фигуру, на которой в качестве примера показано использование, согласно изобретению, беспилотного летательного аппарата.
На фиг. 1 показан проложенный в грунте и покрытый землей трубопровод 1, при этом толщина 4 слоя покрытия землей должна иметь заданное минимальное значение.
Положение и прохождение трубопровода 1 предпочтительно точно определено во время процесса прокладки и внесено в память. При этом значение имеет, прежде всего, верхняя кромка трубы, она измеряется обычно с кадастровой точностью, т.е. с допустимыми отклонениями в установленном нижнем сантиметровом диапазоне. Между отдельными измерительными точками можно выполнять (линейную) интерполяцию, с целью получения тем самым непрерывного прохождения трубопровода (контура трубопровода). Это измерение может при необходимости выполняться с помощью беспилотных летательных аппаратов.
Однако возможно также определение положения, соответственно, прохождения трубопровода 1 в последующем в закопанном состоянии с помощью подходящих способов измерения.
Это может осуществляться, например, с помощью так называемых измерительных кротов с инерциальными измерительными системами, которые вводятся в трубу. Другая возможность состоит в измерении с помощью радарных технологий.
Затем с помощью беспилотных летательных аппаратов создается цифровая модель 3 местности, т.е. цифровое числовое запоминание информации о высоте ландшафта над и вокруг трубопровода 1.
Это может осуществляться, например, с помощью фотограмметрии, при которой соответствующая местность во время пролета измерительных видеокамер фотографируется из различных положений. Из накладывающихся друг на друга снимков измерительных видеокамер затем создается цифровая модель 3 местности, которая вместе с данными прохождения трубопровода используется для определения толщины слоя земляного покрытия 4.
Наряду с камерами, которые работают в различных спектральных диапазонах, беспилотные летательные аппараты могут иметь также, например, радарные или лазерные измерительные системы.
Кроме того, необходимо точное определение положения беспилотного летательного аппарата во время облета и фотографирования, соответственно, во время процессов измерения.
Для этого пригодны, в частности, системы глобальной спутниковой навигации, точность которых может быть улучшена с помощью стационарных приемных станций, которые передают сигналы коррекции пользователю.
В качестве альтернативы спутниковым навигационным системам возможно определение положения с помощью магнитометров, гироскопических датчиков, а также барометрических датчиков.
При облете с помощью беспилотного летательного аппарата 2 целесообразно уже учитывать при управлении полетом известное прохождение трубопровода, т.е. определять точки пути облета автоматически из контура трубопровода. Так, например, летательный аппарат 2 может выдерживать постоянную высоту над трубопроводом и тем самым реагировать на изменения высоты в топографии местности.
В то время как для управления только полетом достаточна обычная точность систем GPS, для создания цифровой модели 3 местности из фотографий беспилотного летательного аппарата 2 требуется точное определение положения, которое может осуществляться, например, с помощью кинематики реального времени (Real Time Kinematic, RTK) или дифференциальной глобальной системы позиционирования (DGPS). Это определение положения не должно выполняться для каждой фотографии, достаточно, когда с помощью отдельных точных положений можно определять абсолютное положение модели местности и ее абсолютные размеры.
Кинематикой реального времени называется специальный вариант дифференциальной системы GPS, которая использует не сообщения GPS, а несущую частоту сигнала для синхронизации. Однако поскольку несущая частота существенно выше частоты сообщений, то достигаемая с помощью кинематики реального времени точность также существенно выше, чем в обычном способе дифференциальной GPS, и лежит в диапазоне нескольких сантиметров.
Создание трехмерной модели местности может осуществляться с помощью фотограмметрического способа и с использованием измерительных видеокамер, т.е. камер с небольшими погрешностями изображения.
Однако в качестве альтернативного решения можно использовать также такие способы, как, например, лазерная альтиметрия (Airborne Laser scanning)/
Лазерное сканирование (называемое также LiDAR - Light Detection And Raging) является методом дистанционного распознавания, при котором с помощью лазерного луча сканируется поверхность земли и измеряется расстояние между измеряемой точкой на поверхности земли и датчиком.
Когда сканирующий блок находится на летательном аппарате 2, то это называется воздушным лазерным сканированием.
Преимущества лазерного сканирования состоят, прежде всего, в достигаемой высокой плотности измерительных точек и точности измерения, а также в возможности проникновения через растительность.
Таким образом, способ образует отличную основу для создания цифровой модели местности, которая, в противоположность цифровой модели поверхности, представляет поверхность земли без зданий и растительности.
В качестве активной системы лазер не зависит от солнечного света, и его можно использовать также ночью для измерения данных.
Воздушные лазерные сканеры для съемок местности обычно работают с длиной волны между 800 и 900 нм (инфракрасный диапазон), спектральные значения которого составляют 0,1-0,5 нм.
Может быть целесообразным согласование длины волны применяемого лазера с областью использования, поскольку вид отражения, соответственно, поглощения объектом лазерных лучей зависит от длины волны. Так, например, водные поверхности отражают свет в видимом диапазоне очень сильно, так что применение лазера с длиной волны в видимом диапазоне затрудняет оценку.
При собственно измерении толщины слоя определяется расстояние верхней кромки трубопровод 1 до соответствующей лежащей вертикально над ним точки модели 1 местности, т.е. сравнивается высота точек на контуре трубопровода с высотой соответствующей каждой точки географической ширины и долготы на модели 3 местности.
При расположении трубопровода 1 на склоне может быть целесообразным определять не только расстояние между верхней кромкой трубы и лежащей вертикально над ней точкой модели 3 местности, а кратчайшее расстояние между точкой на окружности трубопровода 1 и точкой пересечения модели 3 местности с предпочтительно расположенной перпендикулярно оси трубы плоскостью сечения. Таким образом, можно устанавливать также боковые отклонения от заданной толщины слоя.
В показанном примере выполнения для измерения прохождения или профиля местности используется беспилотный летательный аппарат 2, который является особенно целесообразным относительно доступности и эффективности использования. Однако в принципе изобретение не ограничивается этим, и возможно использование любых пилотируемых и беспилотных транспортных средств, если они пригодны для размещения измерительных устройств.
Кроме того, возможно также использование стационарных измерительных устройств.
Предпочтительно, когда способ, согласно изобретению, согласован с системой контролирования и управления трубопровода (SCADA). Так, например, сообщение о неисправности системы управления может инициировать использование измерения толщины слоя в определенной зоне трубопровода, и результаты измерения могут оптически отображаться с помощью системы контролирования и управления.
Изобретение можно использовать предпочтительно не только для измерения толщины слоя земляного покрытия в различно проложенных газовых и нефтяных трубопроводах, но также, например, для водопроводов, кабелей электрического тока и других устройств.
Перечень позиций
1 Трубопровод
2 Беспилотный летательный аппарат
3 Цифровая модель местности
4 Толщина слоя земляного покрытия
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2017 |
|
RU2721450C1 |
| СПОСОБ И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ КОНТРОЛЯ ЭКСПЛУАТАЦИОННОГО СОСТОЯНИЯ И ОПРЕДЕЛЕНИЯ ВЕРОЯТНОСТИ ВЫХОДА ИЗ СТРОЯ НАХОДЯЩИХСЯ ПОД НАПРЯЖЕНИЕМ СИСТЕМ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2021 |
|
RU2839383C1 |
| Способ мониторинга технического состояния объектов транспорта газа на основе геоинформационной системы | 2021 |
|
RU2780304C1 |
| СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ И ВАЛИДАЦИИ СОБЫТИЙ ПРОЦЕССА И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2746442C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЗАГРЯЗНЕНИЙ ПРИБРЕЖНЫХ ВОД И БЕРЕГОВОЙ ПОЛОСЫ НЕФТЬЮ ИЛИ НЕФТЕПРОДУКТАМИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2720050C1 |
| СПОСОБ АЭРОДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2011 |
|
RU2483314C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2428722C2 |
| СПОСОБ ДИАГНОСТИКИ ВЫСОКОВОЛЬТНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2010 |
|
RU2421746C1 |
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| Система мониторинга лесопользования и лесопатологических изменений | 2019 |
|
RU2716477C1 |
Изобретение относится к способу измерения толщины слоя земляных покрытий, в частности, при проложенных под землей газовых и нефтяных трубопроводах. Способ измерения толщины слоя земляных покрытий, в частности, при проложенных под землей газовых и нефтяных трубопроводах, в котором подлежащее покрытию устройство измеряется и его координаты запоминаются относительно заданной системы координат, отличается тем что после нанесения земляного покрытия измеряется профиль местности над устройством, и из него определяется модель местности и сохраняется в заданной системе координат, и что из координат устройства и модели местности определяется толщина слоя земляного покрытия. Технический результат – упрощение контролирования слоя земли. 6 з.п. ф-лы, 1 ил.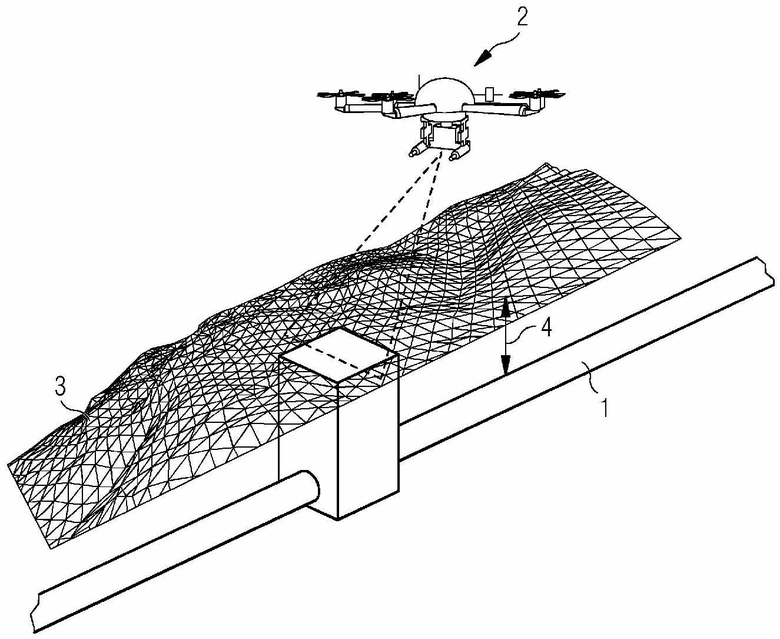
1. Способ измерения толщины слоя земляных покрытий, в частности, при проложенных под землей газовых и нефтяных трубопроводах, отличающийся тем, что подлежащее покрытию устройство измеряется и его координаты запоминаются относительно заданной системы координат, что после нанесения земляного покрытия измеряется профиль местности над устройством и из него определяется модель (3) местности и сохраняется в заданной системе координат и что из координат устройства и модели (3) местности определяется толщина (4) слоя земляного покрытия.
2. Способ по п.1, отличающийся тем, что измерение профиля местности над устройством осуществляется с помощью летательных аппаратов (2).
3. Способ по п.2, отличающийся тем, что для измерения профиля местности осуществляется облет и фотографирование соответствующей местности, что положение летательных аппаратов (2) определяется с помощью спутниковых систем определения положения и из накладывающихся друг на друга фотографий и соответствующего согласованного положения летательных аппаратов (2) создается цифровая модель (3) местности.
4. Способ по п.2, отличающийся тем, что для измерения профиля местности совершается облет соответствующей местности и сканирование с помощью лазерного луча поверхности земли и измеряется расстояние между измеряемой точкой на поверхности земли и летательным аппаратом (2), что положение летательного аппарата (2) определяется с помощью спутниковой системы определения положения и из расстояния между измеряемой точкой на поверхности земли и летательным аппаратом (2) и соответствующего согласованного положения летательного аппарата (2) создается цифровая модель (3) местности.
5. Способ по любому из пп.2-4, отличающийся тем, что в качестве летательного аппарата (2) предусмотрен беспилотный летательный аппарат.
6. Способ по п.5, отличающийся тем, что для управления беспилотным летательным аппаратом (2) используются данные из системы контролирования и управления устройства.
7. Способ по любому из пп.1-6, отличающийся тем, что результат определения толщины слоя земляного покрытия (4) изображается с помощью системы контролирования и управления устройства.
| WO 2014056541 A1, 17.04.2014 | |||
| WO 2014149802 A1, 25.09.2014 | |||
| WO 2000018124 A1, 30.03.2000 | |||
| Оперативное запоминающее устройство с коррекцией ошибок | 1988 |
|
SU1709396A1 |

