Изобретение касается способа управления беспилотными летательными аппаратами.
Для защиты от внешних повреждений газо- и нефтепроводы наблюдаются обходчиками трасс и/или путем регулярного облета трассы самолетами или вертолетами. Из перспективы птичьего полета по возможным небольшим окрашиваниям грунта могут также распознаваться мелкие утечки, которые при рассмотрении с земли были бы совсем не заметны. При этом также распознают оборудование стройплощадок, и возможен запрос на месте, есть ли там информация об условиях и имеется ли разрешение. Однако облет связан с некоторым риском, так что постоянно происходят аварии.
Особенно значительным является контроль трубопроводов в так называемых областях оседания грунта. Это регионы, такие как, например, северная Рурская область, где происходили интенсивные, приземные горные работы, и теперь земляной грунт по большой площади и медленно (а иногда также толчкообразно) подается и опускается. Этим затрагивается, конечно, лежащий в грунте трубопровод, в результате он провисает и может повреждаться. При других движениях грунта может также происходить плющение трубопровода. Поэтому некоторые эксплуатационники трубопроводов нанимают землемеров для непрерывного контроля таких критических областей. При превышении некоторого размера трубопровод должен раскапываться и перерезаться, и затем вставляться или, соответственно, вырезаться соответствующий участок.
При контроле газо- и нефтепроводов, а также электрических линий с воздуха все чаще находят применение беспилотные летательные аппараты, так называемые дроны. Они более экономичны, чем применение геликоптера, меньше и потому более маневренны, и при аварии обычно не подвергаются опасности люди.
В задачах по замеру и инспектированию посредством беспилотных летательных аппаратов, что касается количества регистрируемых данных и качества данных, часто решающее значение имеет высота полета. Большая высота полета создает обзор и уменьшает риск столкновений с препятствиями, что, в частности, имеет значение для автоматического или полуавтоматического полета беспилотных летательных аппаратов по заданным маршрутам.
С другой стороны, некоторые применяемые в задачах замера и инспектирования сенсоры выигрывают при наиболее короткой возможной дистанции съемки или, соответственно, измерения, так как качество данных уменьшается с удалением. К тому же именно у возвышенных объектов дополнительно к перспективе птичьего полета («надир») для задач инспектирования требуется вид сбоку («косой»), идеальным образом под как можно более пологим углом съемки.
Поэтому в основе изобретения лежит задача, предложить способ управления беспилотными летательными аппаратами, который удовлетворяет этим запросам.
В соответствии с изобретением это осуществляется с помощью способа по п.1 формулы изобретения.
Предпочтительные варианты осуществления следуют из зависимых пунктов формулы изобретения.
Изобретение делает возможным автоматизированный контроль и замер установок с помощью автономно летающих беспилотных летательных аппаратов.
Особенно предпочтительными случаями применения, в частности, считаются:
- контроль и замер складской области и находящихся в ней объектов (конструктивных элементов);
- контроль силовых линий электропередачи;
- локализация утечек в газопроводах;
- измерение толщины слоя земли над проложенными под землей газо- и нефтепроводами.
Изобретение поясняется подробнее с помощью фигур.
В качестве примера показано:
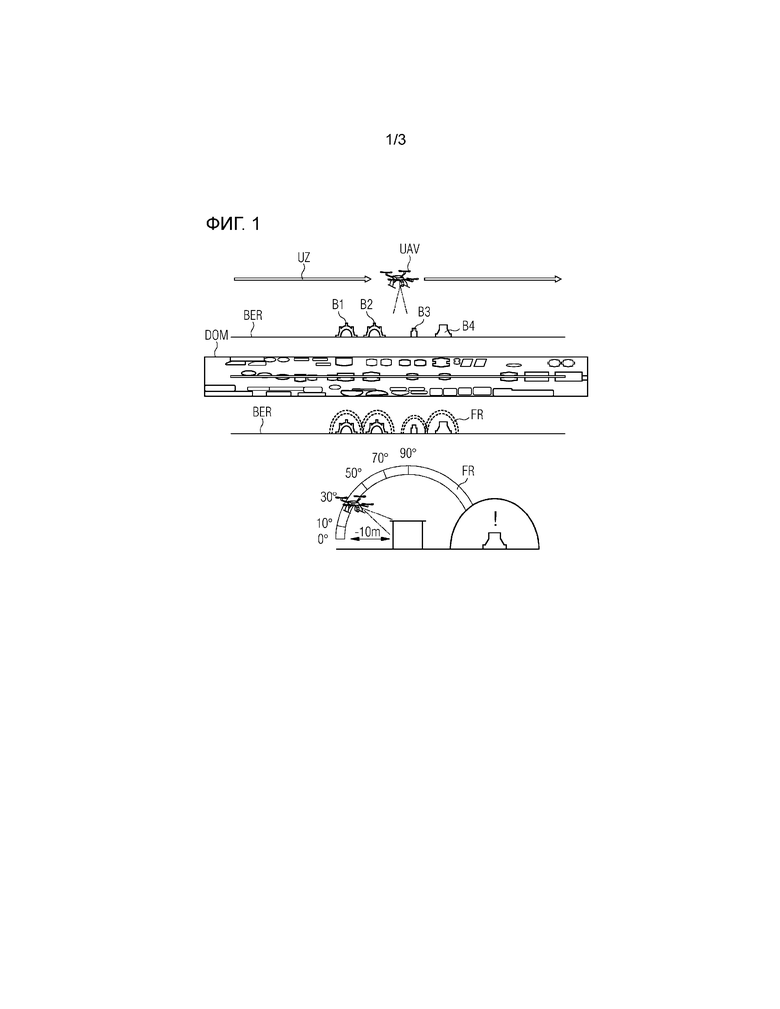
фиг.1: процесс облета складской области для регистрации конструктивных узлов или конструктивных элементов складских запасов;
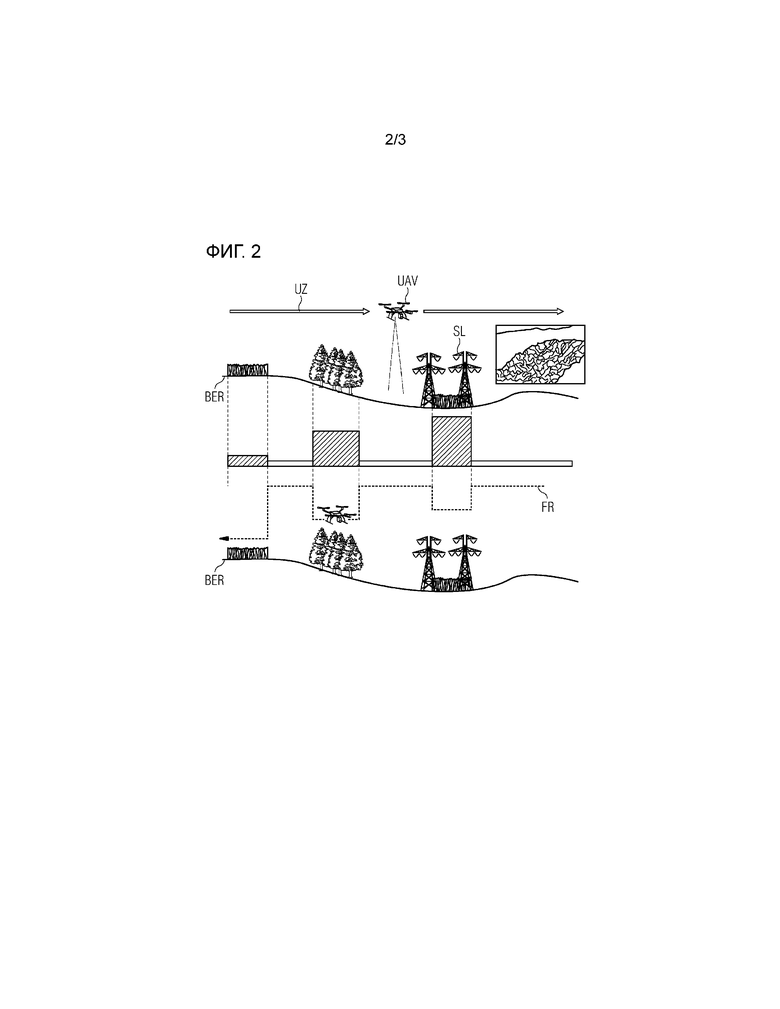
фиг.2: процесс облета высоковольтной линии электропередачи;
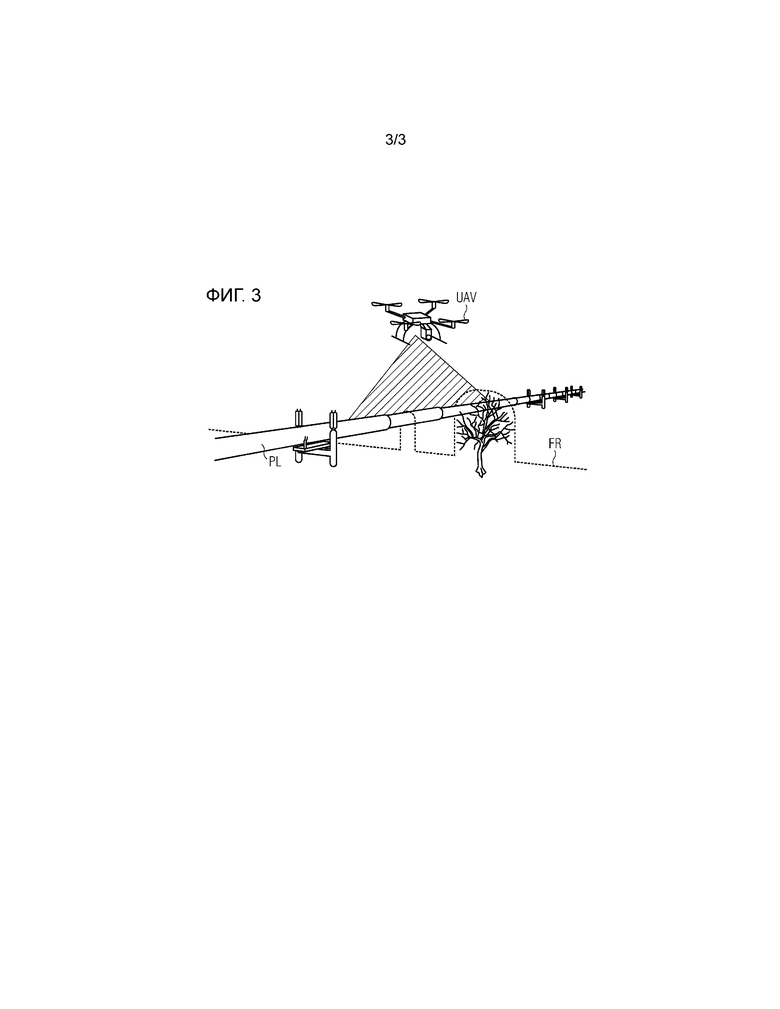
фиг.3: обзорный замер опертого на стойки надземного трубопровода.
На фиг.1 схематично показана складская область BR, имеющая различные конструктивные элементы B1, B2, B3, B4. Эта складскую область может находиться под открытым небом, или же также в закрытом помещении, таком как, например, складской цех.
В частности, в случае больших конструктивных элементов B1, B2, B3, B4, имеющих размеры в пределах 5-10 м и выше, приземная съемка (вблизи земли) и замер быстро достигает своих границ, поэтому в этом случае применение беспилотных летательных аппаратов, имеющих надлежащую сенсорную систему, дает особые преимущества.
При этом конструктивные элементы B1, B2, B3, B4 могут не только локализироваться и идентифицироваться, но и с высокой точностью замеряться и проверяться в отношении соблюдения допусков изготовления, что зачастую является условием для дальнейшей обработки.
При этом точность измерения зависит от высоты полета и, в частности, в случае конструктивных элементов B1, B2, B3, B4, имеющих сложную поверхность, также от угла съемки и числа точек измерения, так что для хороших результатов измерения требуются съемки или, соответственно, процессы измерения из различных положений.
Необходимые для этого летательные движения повышают опасность столкновений с объектами в окружении.
Итак, в соответствии с предлагаемым изобретением способом управление беспилотным летательным аппаратом, применяемым для регистрации и замера объектов в области склада, осуществляется таким образом, что предварительно для регистрируемой и замеряемой области устанавливается практически беспрепятственная зона UZ перелета, в которой беспилотный летательный аппарат UAV с помощью надлежащих сенсоров и технологий съемки выполняет обзорные замеры области (BR) склада.
Эта беспрепятственная зона UZ перелета предусматривается предпочтительно на высоте, на которой также осуществляется перелет над максимально ожидаемыми объектами B1, B2, B3, B4. Когда область склада является крытой, зона UZ перелета будет предусматриваться под крышей или, соответственно, под смонтированными на крыше элементами, такими как, например, осветительные приборы.
В этой зоне осуществляется первый облет и обзорный замер области BR склада.
Затем на базе результатов обзорных измерений определяется обзорная модель области склада вместе с находящимися в ней объектами.
Предпочтительно речь идет при этом о трехмерной цифровой модели DOM поверхности, которая, например, может составляться посредством фотограмметрических способов из перекрывающихся фотографий, имеющих различные положения, или же путем лазерного замера (LiDAR) (англ. Light Identification Detection and Ranging, световое обнаружение и определение дальности).
По этой обзорной модели DOM определяется последовательность положений для детальных измерений и беспрепятственный маршрут FR полета для беспилотной летательной модели UAV для принятия этой последовательности положений. Этот маршрут кладется в основу управления беспилотной летательной модели UAV.
При этом может быть предпочтительно, если обзорные измерения и детальные измерения проводятся различными беспилотными летательными аппаратами UAV. В частности, потому что тогда беспилотные летательные аппараты UAV могут быть оснащены различными сенсорами, и при необходимости обзорные и детальные измерения могут осуществляться различными способами. При этом было бы также возможно, чтобы для детальных измерений применялись малые и маневренные беспилотные летательные объекты UAV, что особенно предпочтительно при стесненных условиях.
Помимо этого, при параллельном применении нескольких беспилотных летательных аппаратов UAV может сокращаться время замера, что представляет собой дополнительное значительное преимущество, в частности, в случаях применения, в которых конструктивные элементы B1, B2, B3, B4 имеют только короткое время складирования, т.е. время прохождения конструктивных элементов через склад сравнительно мало.
Маршрут FR может быть оптимизирован известными алгоритмами маршрутизации по различным параметрам, таким как, например, затрата времени, расход энергии или же риски столкновения.
Другой предпочтительный случай применения предлагаемого изобретением способа поясняется с помощью фиг.2.
Изображение в соответствии с фиг.2 показывает область вокруг двух электрических высоковольтных линий, выполненных в виде воздушной линии.
Вследствие их размеров, многокилометровой длины и высоты примерно 60 метров, контроль этих воздушных линий является задачей, которая обычно выполняется посредством вертолетов.
Благодаря применению беспилотных летательных аппаратов UAV может значительно снижаться стоимость облета и вместе с тем возрастать частота контрольных полетов и повышаться качество контроля.
При этом в соответствии с изобретением совершается перелет над упомянутой территорией на беспрепятственной высоте и, например, ее фотографирование или сканирование посредством LiDAR.
Наряду со съемками в видимой области света, для определенных случаев применения предпочтительны также съемки в близкой инфракрасной области или с термическим инфракрасным. Так, близкий инфракрасный, имеющий длину волны от 780 нм до 3 мкм (спектральные области IR-A и IR-B), особенно хорошо подходят для обнаружения вегетаций, так как в близкой инфракрасной области хлорофилл имеет примерно в 6 раз более высокую отражаемость, чем в видимом спектре. Для распознавания вегетации этот эффект может использоваться таким образом, что один снимок делается в предпочтительно красном спектре видимой области, а другой снимок в близком инфракрасном. Полезные объекты имеют как в видимой, так и в близкой инфракрасной области приблизительно одинаковую отражаемость, в то время как содержащая хлорофилл вегетация в близком инфракрасном имеет заметно более высокую степень отражения. Таким образом, напр., также зеленые полезные объекты могут отличаться от таких же зеленых вегетаций.
Термический инфракрасный может, напротив, использоваться для определения утечек в трубопроводах, при которых жидкости или газы выходят с более высокой по сравнению с окружением температурой.
У высоковольтных линий также температура многопроволочных проводов может быть указанием на дефект, и поэтому термический инфракрасный снимок может давать ценные данные.
По зарегистрированным данным и определенным, например, посредством глобальных систем спутниковой навигации положениям беспилотного летательного аппарата UAV в результате создается трехмерная цифровая модель DOM поверхности в качестве обзорной модели.
В качестве альтернативы или, соответственно, дополнения к системам спутниковой навигации возможно определение положения посредством магнетометров, инерциальных измерительных систем (IMU), а также барометрических сенсоров.
Из анализа обзорной модели определяются так называемые «точки интереса», такие как, например, термически выделяющиеся точки или заранее установленные легко повреждаемые элементы линий, такие как, напр., изоляторы, и выбираются целесообразные для этого положения для детальных измерений.
При выборе положения должны учитываться применяемый метод измерения и получающиеся при этом расстояния и углы относительно объекта измерения, а также предписания по безопасности, так чтобы, с одной стороны, качество найденных данных достигало оптимума, а с другой стороны, вероятность столкновения или, соответственно, угроза беспилотного летательного аппарата UAV при подлете и отлете от этого положения была равна минимуму.
Так, у высоковольтной линии при эксплуатации должны также учитываться напряженности электрического поля и магнитные поля, которые при известных обстоятельствах могли бы влиять или создавать помехи для измерительных приборов или электроники беспилотного летательного аппарата UAV.
Помимо этого, вегетация в виде деревьев или кустарников также образует препятствия и источники опасности для облета.
По этим данным известными способами маршрутизации находится последовательность положений для детальных измерений и беспрепятственного маршрута FR полета для беспилотной модели UAV для принятия этой последовательности положений.
Положения для детальных измерений могут быть определены геометрией объекта. Так, у высоковольтных линий SL или, как изображено на фиг.3, у опертых над землей на стойки трубопроводов PL предлагается облет линий вертикальной петлей.
Может быть предпочтительно применять несколько беспилотных летательных аппаратов UAV, имеющих различные оснастки.
Так, например, для обзорных измерений из практически беспрепятственной зоны UZ перелета могут применяться летательные аппараты с несущей поверхностью, которые достигают высоких скоростей и могут проходить большие дистанции.
Детальные измерения, напротив, могут выполняться с помощью летательных аппаратов с несущим винтом, таких как, например, мультикоптеры, которые являются особенно маневренными и благодаря их способности к парящему полету делают возможными также другие способы измерения.
Для этого беспилотные летательные аппараты UAV могут быть также укомплектованы различными измерительными устройствами.
Может быть целесообразно, взаимно согласовать применение нескольких беспилотных летательных аппаратов UAV, так чтобы, например, каждому беспилотному летательному аппарату UAV отводился определенный участок высоковольтной линии SL. Это распределение может также осуществляться динамически, напр., в зависимости от условий ветра и максимальных дальностей полета каждого из беспилотных летательных аппаратов UAV.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
UAV беспилотный летательный аппарат
UZ зона перелета
DOM трехмерная цифровая модель поверхности
BER регистрируемая и замеряемая область
FR беспрепятственный маршрут полета
B1, B2, B3, B4 складируемые конструктивные элементы
SL Линия передачи электрического тока
PL Трубопровод
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА АТМОСФЕРНОГО ВОЗДУХА | 2011 |
|
RU2471209C1 |
| Исследование поверхности летательных аппаратов при помощи беспилотного летательного аппарата | 2020 |
|
RU2734363C1 |
| СПОСОБ И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ КОНТРОЛЯ ЭКСПЛУАТАЦИОННОГО СОСТОЯНИЯ И ОПРЕДЕЛЕНИЯ ВЕРОЯТНОСТИ ВЫХОДА ИЗ СТРОЯ НАХОДЯЩИХСЯ ПОД НАПРЯЖЕНИЕМ СИСТЕМ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2021 |
|
RU2839383C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности высоковольтных ЛЭП с применением беспилотных летательных аппаратов | 2024 |
|
RU2829914C1 |
| СПОСОБ ИСПЫТАНИЯ СИСТЕМ ОБНАРУЖЕНИЯ КАНАЛА УПРАВЛЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОХРАНЯЕМЫХ ОБЪЕКТАХ | 2023 |
|
RU2821601C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния и безопасности ЛЭП в непрерывном режиме | 2023 |
|
RU2821208C1 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| Способ проведения геологоразведочных работ с использованием беспилотных воздушных средств | 2022 |
|
RU2805015C1 |
| ИЗМЕРЕНИЕ ТОЛЩИНЫ СЛОЯ ЗЕМЛЯНОГО ПОКРЫТИЯ | 2017 |
|
RU2708093C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2009 |
|
RU2428722C2 |
Изобретение относится к способу управления беспилотным летательным аппаратом (UAV), применяемым для регистрации и замера объектов в заданной области. Для управления UAV для регистрируемой и замеряемой области устанавливают практически беспрепятственную зону перелета, в которой UAV с помощью надлежащих сенсоров и технологий съемки проводит обзорные измерения области. На базе обзорных измерений определяют трехмерную цифровую модель для замеряемой области вместе с находящимися в ней объектами. На базе трехмерной цифровой модели определяют последовательность положений для детальных измерений и беспрепятственный маршрут полета для UAV, который принимают за основу его управления. Обеспечивается возможность автоматизированного контроля и замера объектов с воздуха. 6 з.п. ф-лы, 3 ил.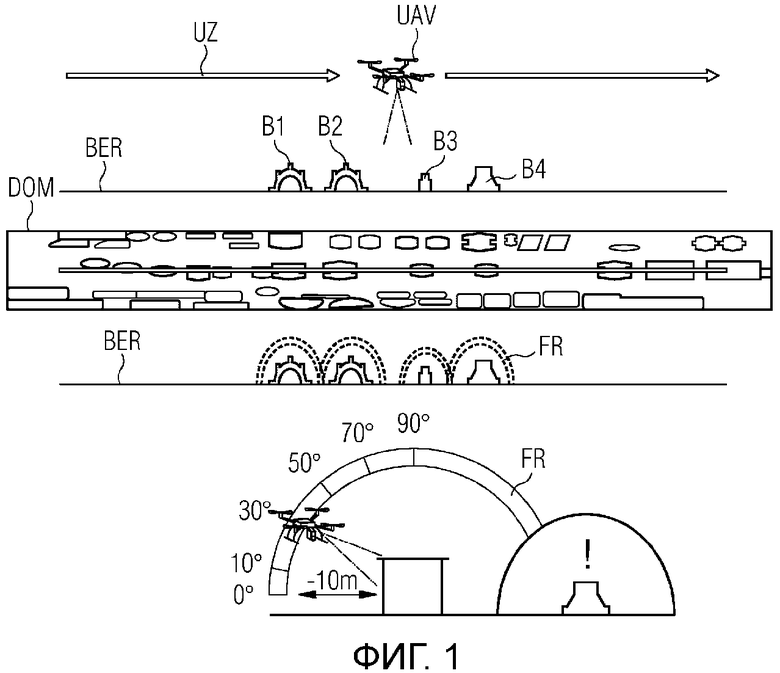
1. Cпособ управления беспилотным летательным аппаратом (UAV), применяемым для регистрации и замера объектов в заданной области, отличающийся тем, что
- для регистрируемой и замеряемой области (BER) устанавливают практически беспрепятственную зону (UZ) перелета, в которой беспилотный летательный аппарат (UAV) с помощью надлежащих сенсоров и технологий съемки проводит обзорные измерения области,
- на базе обзорных измерений определяют трехмерную цифровую модель (DOM) поверхности области (BER) вместе с находящимися в ней объектами, и
- на базе трехмерной цифровой модели (DOM) поверхности определяют последовательность положений для детальных измерений и беспрепятственный маршрут (FR) полета для беспилотной летательной модели (UAV) для принятия последовательности положений и берут за основу управления беспилотной летательной модели (UAV).
2. Способ по п.1, отличающийся тем, что в качестве заданной области посредством беспилотного летательного аппарата (UAV) регистрируют и замеряют складскую область (BER), содержащую различные конструктивные элементы или конструктивные узлы (B1, B2, B3, B4).
3. Способ по п.1, отличающийся тем, что в качестве регистрируемого и замеряемого объекта предусмотрена линия (SL) передачи электрического тока.
4. Способ по п.1, отличающийся тем, что в качестве регистрируемого и замеряемого объекта предусмотрен трубопровод (PL) для жидкостей или газов.
5. Способ по одному из пп.1-4, отличающийся тем, что трехмерную цифровую модель (DOM) поверхности области создают из перекрывающихся фотографий.
6. Способ по одному из пп.1-4, отличающийся тем, что трехмерную цифровую модель (DOM) поверхности области создают из LiDAR-измерений беспилотных летательных аппаратов (UAV).
7. Способ по одному из пп.1-6, отличающийся тем, что применяют несколько беспилотных летательных аппаратов (UAV), имеющих различные оснастки.
| US 9162753 B1, 20.10.2015 | |||
| US 20160202695 A1, 14.07.2016 | |||
| СИСТЕМЫ И СПОСОБЫ ЗАХВАТА ИЗОБРАЖЕНИЙ БОЛЬШОЙ ПЛОЩАДИ ПО ЧАСТЯМ, ВКЛЮЧАЮЩИЕ В СЕБЯ КАСКАДНЫЕ КАМЕРЫ И/ИЛИ КАЛИБРОВОЧНЫЕ ПРИЗНАКИ | 2010 |
|
RU2562707C2 |
| US 20140316616 A1, 23.10.2014 | |||
| US 20160212345 A1, 21.07.2016. | |||

