Изобретение относится к области машиностроения, в частности к системам управления торможением самолетов и предназначено для использования в объектах авиационной техники.
Известен способ управления торможением колес транспортного средства, заключающийся в формировании сигнала управления давлением в зависимости от величины перемещения тормозной педали с учетом текущего углового замедления тормозного колеса и его проскальзывания (например, патент №2108247, опубликовано 10.04.1998 г.).
При использовании известного способа в процессе торможения самолета поддерживается заданное от тормозных педалей значение замедления самолета независимо от использования дополнительных средств торможения, что не обеспечивает в необходимых случаях возможность повысить эффективность торможения для значительного сокращения тормозной дистанции путем использования тормозного парашюта, поскольку в результате действия аэродинамических сил парашюта замедление самолета начинает превышать заданное от тормозных педалей значение, приводя к уменьшению тормозного давления (и момента), не позволяя превысить начально заданную от тормозных педалей эффективность торможения.
Указанный недостаток известного способа в конечном итоге снижает эксплуатационную надежность самолета.
Положительный результат, который может быть достигнут при использовании предлагаемого технического решения, выражается в обеспечении возможности значительного сокращения тормозной дистанции в необходимых случаях за счет поддержания в процессе торможения заданного значения замедления самолета с учетом использования тормозного парашюта, что повышает эксплуатационную надежность самолета.
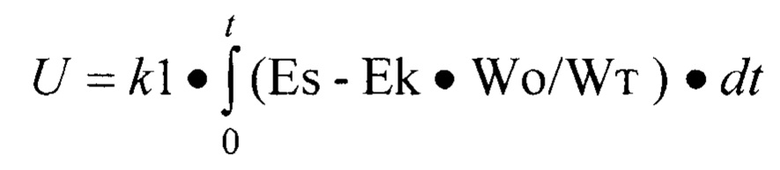
Указанный результат достигается тем, что сигнал управления (U), которому соответствует тормозное давление, вычисляют как величину, пропорциональную интегралу от разности между заданным и текущим (с учетом относительного проскальзывания) угловыми замедлениями колеса, причем заданное угловое замедление колеса определяют в зависимости от величины перемещения тормозной педали с учетом замедления самолета, создаваемого тормозным парашютом (в случае его применения - за счет учета значения признака выпуска парашюта):

где величина заданного углового замедления колеса:
Es=Ео+ВП*Kp*Wo2
Eo - величина заданного углового замедления колеса, пропорциональная перемещению тормозной педали;
признак выпуска парашюта:

Kp - коэффициент, учитывающий аэродинамические характеристики парашюта;
Ek - величина текущего углового замедления колеса;
Wo - угловая скорость колеса, соответствующая скорости самолета;
Wт - угловая скорость тормозящегося колеса;
t - текущее время торможения;
k1 - коэффициент пропорциональности.
Благодаря изменению сигнала управления указанным образом в процессе торможения замедление самолета поддерживается на уровне, заданном оператором, а в случае применения тормозного парашюта, замедление самолета в процессе торможения увеличивается на величину (зависящую от скорости самолета), создаваемую аэродинамическими силами сопротивления парашюта, обеспечивая дополнительное сокращение тормозной дистанции, что, в конечном итоге, повышает эксплуатационную надежность самолета.
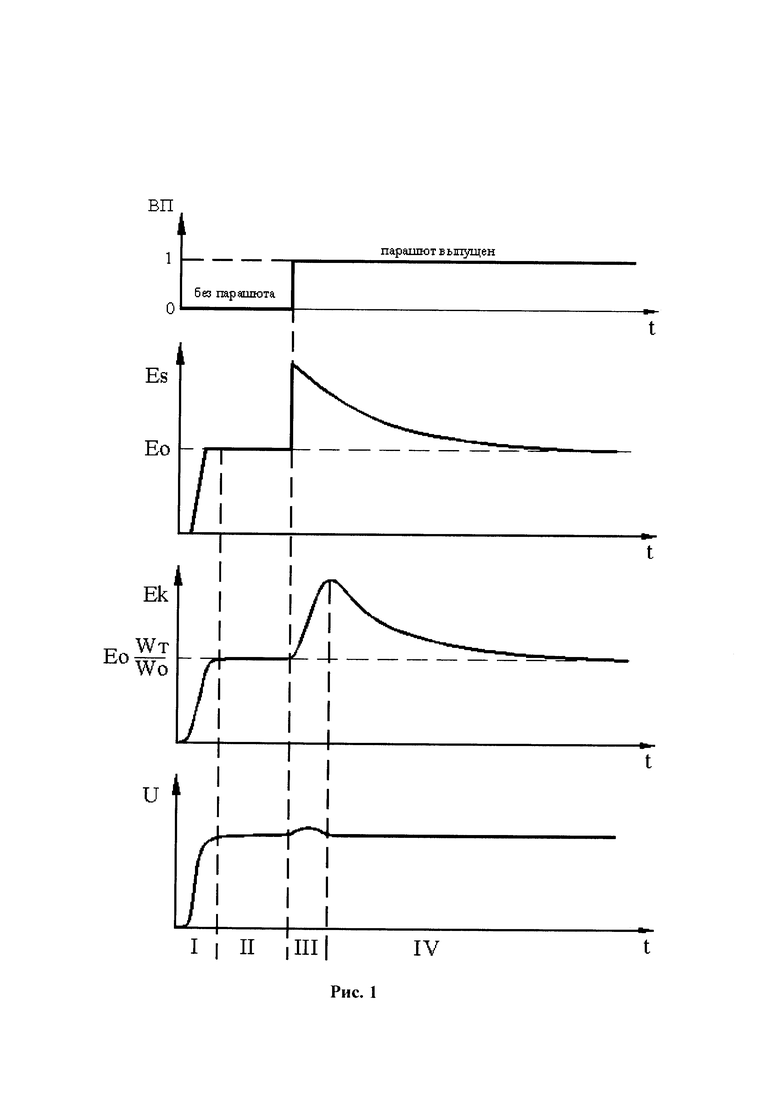
На рисунке 1 представлены графики изменения сигнала управления (U), величин заданного (Es) и текущего (Ek) углового замедления колеса и других параметров, иллюстрирующих предлагаемый способ управления торможением самолета.
Нажатием тормозной педали оператор задает необходимую эффективность торможения самолета (величину углового замедления колеса Еo). В случае торможения без применения тормозного парашюта (признак ВП=0) заданное замедление Es=Еo, т.е. зависит только от величины перемещения тормозной педали. При этом сигнал (U) и соответствующее ему тормозное давление нарастают пропорционально интегралу от разности между заданным и текущим угловым замедлением колеса в соответствии с формулой (1) до тех пор, пока не станет равной нулю разность между заданным (Es) и текущим (Ek) замедлением колеса (с учетом его проскальзывания) (участок I на рисунке). По окончании переходного процесса автоматически поддерживается величина сигнала (U) и соответствующее ей тормозное давление, при котором обеспечивается заданная величина (Es) углового замедления колеса (участок II).
В случае необходимости более эффективного торможения оператор выпускает тормозной парашют. В этот момент значение признака выпуска парашюта становится равным: ВП=1. При этом значение заданного замедления колеса становится равным: Es=Еo+Kp*Wo2, т.е. в зависимости от текущей скорости самолета в момент выпуска парашюта значение (Kp*Wo2) резко увеличивается, а затем уменьшается по квадратичной зависимости. При этом после окончания непродолжительного переходного процесса (участок III) значение сигнала (U) возвращается к величине, определяемой перемещением тормозной педали, а текущее угловое замедление колеса (следовательно, и самолета) соответствует суммарному заданному угловому замедлению колеса (Es) (участок IV).
Коэффициент (k1) в формуле (1) выбирается в зависимости от конкретных значений массы самолета, момента инерции тормозного колеса, обеспечиваемого быстродействия исполнительного устройства и требуемой точности обеспечения заданной эффективности торможения. Коэффициент (Kp) вычисляется в зависимости от параметров применяемого тормозного парашюта (его площади, коэффициента лобового сопротивления и др.)
Таким образом, при использовании предлагаемого способа происходит автоматическая настройка уровня тормозного давления и момента колеса, обеспечивая заданную эффективность торможения с учетом ее повышения при выпуске тормозного парашюта, что позволяет значительно сократить тормозную дистанцию.
Предлагаемый способ управления торможением самолета может быть реализован, например, с использованием вычислителя на базе микропроцессора типа МК51 (см. Справочник "Однокристальные микро ЭВМ", Москва, "Бином", 1994, стр. 107) или аналоговой техники, формирующего сигнал управления гидроусилителем типа "сопло-заслонка" по сигналам от датчиков хода тормозной педали (Еo) и угловой скорости колес самолета (Wt). Величина (Wo) может определяться по измеренной угловой скорости нетормозящегося носового колеса или по измеренной линейной скорости самолета с учетом радиуса колеса.
Изобретение относится к способу автоматического управления торможением самолета. Для реализации способа формируют сигнал управления давлением в зависимости от величины перемещения тормозной педали и текущего углового замедления тормозного колеса с учетом его проскальзывания, а также с учетом замедления самолета, создаваемое тормозным парашютом по определенному закону. Обеспечивается повышение надежности и эффективности торможения. 1 ил.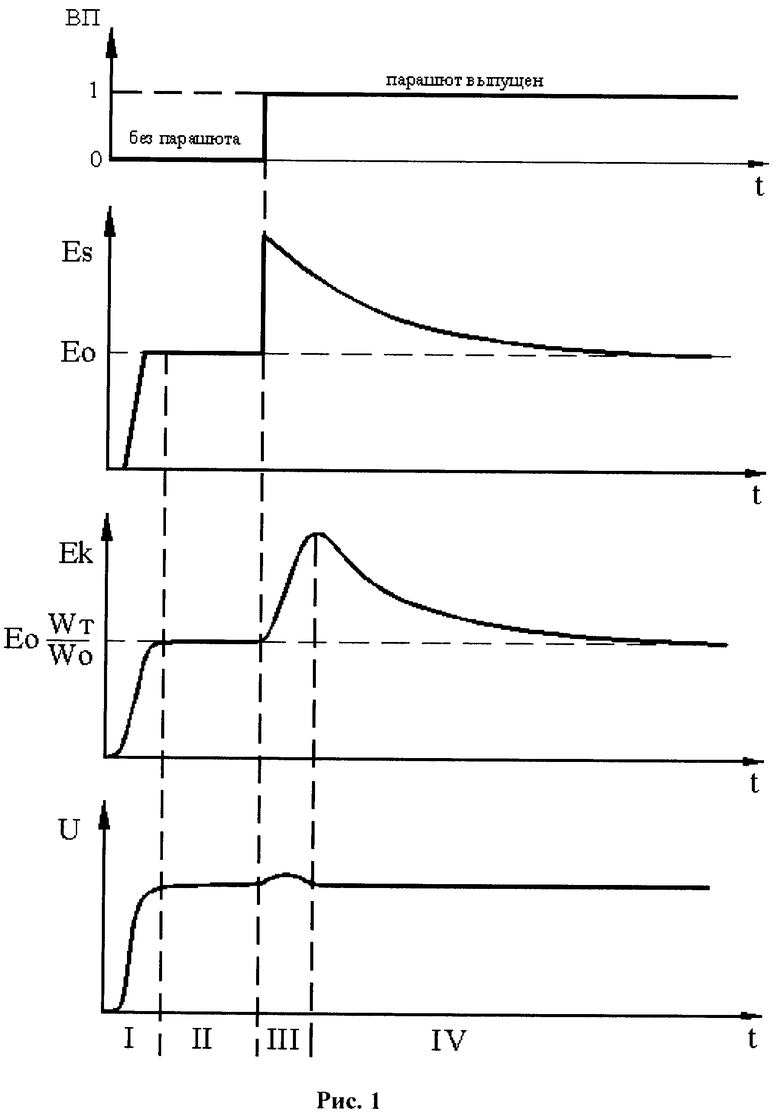
Способ автоматического управления торможением самолета, заключающийся в формировании сигнала управления давлением в зависимости от величины перемещения тормозной педали и текущего углового замедления тормозного колеса с учетом его проскальзывания, отличающийся тем, что сигнал управления давлением формируют с учетом замедления самолета, создаваемого тормозным парашютом, по следующему закону:
 , где
, где
величина заданного углового замедления колеса:
Es=Ео+ВП*Kp*Wo2
Ео - величина заданного углового замедления колеса, пропорциональная перемещению тормозной педали;
признак выпуска парашюта:

Kp - коэффициент, учитывающий аэродинамические характеристики парашюта;
Ek - величина текущего углового замедления колеса;
Wo - угловая скорость колеса, соответствующая скорости самолета;
Wт - угловая скорость тормозящегося колеса;
t - текущее время торможения;
k1 - коэффициент пропорциональности.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108247C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |
| СИСТЕМА ТОРМОЖЕНИЯ КОЛЕС ШАССИ САМОЛЕТА | 1994 |
|
RU2102283C1 |
| US 3089667 A1, 14.05.1963 | |||
| US 4180223 A1, 25.12.1979. | |||

