Изобретение относится к области машиностроения, в частности к системам управления торможением транспортного средства, и предназначено для использования преимущественно в объектах авиационной техники.
Известен способ автоматического управления торможением колес транспортного средства, заключающийся в формировании сигнала управления, которому соответствует тормозное давление, в зависимости от текущего углового замедления тормозного колеса с учетом его проскальзывания (см. патент РФ №2108247, кл. В 60 Т 8/00).
При использовании известного способа в процессе торможения многоколесного транспортного средства за счет различных (в пределах допускаемых значений) характеристик и параметров тормозов колес и каналов устройства управления давлением может происходить неравномерное распределение энергии торможения транспортного средства между тормозными колесами, что может привести к перегреву и выходу из строя отдельных тормозных колес. Указанный недостаток известного способа в конечном итоге снижает эксплуатационную надежность транспортного средства.
Положительный результат, который может быть достигнут при использовании предлагаемого технического решения, выражается в повышении эксплуатационной надежности транспортного средства за счет равномерного распределения энергии, поглащаемой тормозами колес в процессе торможения транспортного средства, с сохранением заданной эффективности торможения.
Указанный результат достигается тем, что сигнал управления, которому соответствует тормозное давление, вычисляют отдельно для каждого тормозного колеса пропорционально интегралу от отклонения замедления колеса от заданного значения с учетом относительного отклонения текущей угловой скорости колеса от минимальной из угловых скоростей всех тормозных колес:

где Ео - величина заданного углового замедления колес, пропорциональная перемещению тормозной педали;
Еi - величина текущего углового замедления данного колеса;
t - текущее время торможения;
Wi - угловая скорость данного тормозного колеса;
Wmin - минимальная из угловых скоростей всех тормозных колес;
k1, k2 - весовые коэффициенты.
Благодаря изменению сигнала управления указанным образом в процессе торможения замедление транспортного средства поддерживается на уровне, заданном оператором. При этом обеспечивается равномерное распределение между тормозами колес энергии, поглащаемой в процессе торможения транспортного средства, исключая тем самым перегрев отдельных колес, что, в конечном итоге, повышает эксплуатационную надежность транспортного средства.
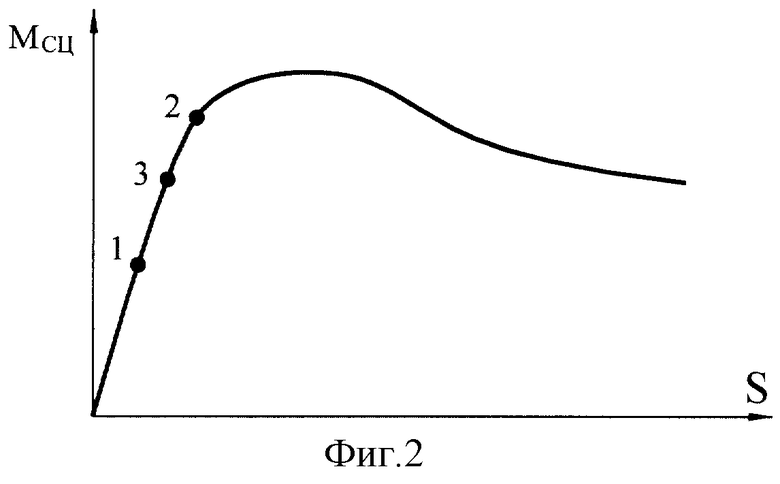
На фиг. 1 представлен характер изменения угловых скоростей колес, сигналов управления и тормозных моментов в процессе торможения транспортного средства.
На фиг. 2 представлена типовая зависимость момента сцепления колеса с дорожным покрытием от относительного проскальзывания колеса.
Рассмотрим для примера процесс торможения транспортного средства с двумя тормозными колесами, причем предположим, что по технологическим причинам при одинаковом уровне давления тормоз первого колеса создает меньший тормозной момент, чем тормоз второго колеса.
Нажатием тормозных педалей оператор задает необходимую эффективность торможения транспортного средства (величину углового замедления колес Ео). В начальный момент торможения при равных сигналах управления (Ui) и давления в тормозах колес (точка 1 на фиг. 1) тормозные моменты (Мт) будут различны, что соответствует различным моментам сцепления (Мсц) колес с дорожным покрытием. При этом вращение колес за счет неодинаковых моментов сцепления (Мсц) происходит с разным проскальзыванием (точки 1 и 2 на фиг. 2), а следовательно, с разной угловой скоростью.
При разных скоростях вращения колес в предлагаемом техническом решении сигналы управления (Ui) давлением корректируются в зависимости от относительного отклонения текущей угловой скорости каждого колеса от минимальной из угловых скоростей всех тормозных колес, в результате чего по окончании переходного процесса за счет соответствующего изменения величин сигналов (Ui) и тормозных давлений обеспечивается равенство тормозных моментов (соответственно и моментов сцепления - точка 3 на фиг. 2) всех тормозных колес при заданной величине (Ео) углового замедления колес.
Коэффициенты (k1) и (k2) выбираются в зависимости от конкретных значений массы транспортного средства, момента инерции тормозных колес, обеспечиваемого быстродействия исполнительного устройства и требуемой точности обеспечения заданной эффективности торможения.
Таким образом, при использовании предлагаемого способа происходит автоматическая настройка одинаковых уровней тормозного момента в каждом колесе, обеспечивающих равномерное распределение поглащаемой энергии и заданную эффективность торможения при значительном разбросе параметров тормозов колес, а также при изменении других сил, действующих в процессе торможения транспортного средства.
Предлагаемый способ управления торможением транспортного средства может быть реализован, например, путем регулирования давления в тормозах колес гидроусилителями типа "сопло-заслонка", сигналы управления которыми формируются вычислителем на базе микропроцессора типа МК51 (см. Справочник "Однокристальные микроЭВМ", Москва, "Бином", 1994, с.107) или аналоговой техники по сигналам от датчиков хода тормозной педали и угловых скоростей колес транспортного средства.
Изобретение относится к области машиностроения, в частности к системам управления торможением транспортного средства. Способ автоматического управления торможением транспортного средства заключается в формировании сигналов управления, которым соответствуют тормозные давления, в зависимости от величин заданного и текущего угловых замедлений тормозных колес. Сигнал управления для каждого тормозного колеса формируют с учетом отношения текущей угловой скорости данного колеса к минимальной из угловых скоростей всех тормозных колес по следующему закону:  , где Eo - величина заданного углового замедления колес, пропорциональная перемещению тормозной педали; Ei - величина текущего углового замедления данного колеса; t - текущее время торможения; Wi - угловая скорость данного тормозного колеса; Wmin - минимальная из угловых скоростей всех тормозных колес; k1, k2 - весовые коэффициенты. Техническим результатом является повышение эксплуатационной надежности транспортного средства за счет равномерного распределения энергии, поглощаемой тормозами колес в процессе торможения транспортного средства, с сохранением заданной эффективности торможения. 2 ил.
, где Eo - величина заданного углового замедления колес, пропорциональная перемещению тормозной педали; Ei - величина текущего углового замедления данного колеса; t - текущее время торможения; Wi - угловая скорость данного тормозного колеса; Wmin - минимальная из угловых скоростей всех тормозных колес; k1, k2 - весовые коэффициенты. Техническим результатом является повышение эксплуатационной надежности транспортного средства за счет равномерного распределения энергии, поглощаемой тормозами колес в процессе торможения транспортного средства, с сохранением заданной эффективности торможения. 2 ил.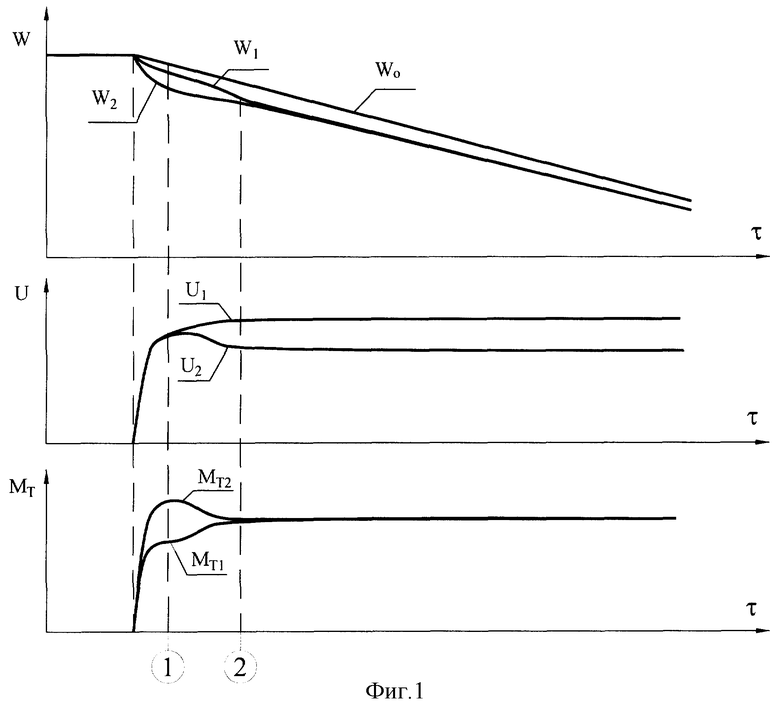
Способ автоматического управления торможением транспортного средства, заключающийся в формировании сигналов управления, которым соответствуют тормозные давления, в зависимости от величин заданного и текущего угловых замедлений тормозных колес, отличающийся тем, что сигнал управления для каждого тормозного колеса формируют с учетом отношения текущей угловой скорости данного колеса к минимальной из угловых скоростей всех тормозных колес по следующему закону:
 ,
,
где Eo - величина заданного углового замедления колес, пропорциональная перемещению тормозной педали;
Еi - величина текущего углового замедления данного колеса;
t - текущее время торможения;
Wi - угловая скорость данного тормозного колеса;
Wmin - минимальная из угловых скоростей всех тормозных колес;
k1, k2 - весовые коэффициенты.
| Ленточный тормоз лебедки бурового агрегата | 1988 |
|
SU1625824A1 |
| Способ регулирования качения колеса в тормозном режиме | 1980 |
|
SU878627A1 |
| US 4180223 А, 25.12.1979 | |||
| US 5043658 А, 27.08.1991. | |||

